33-99No. Mufu E Rd. Gulou District, Nanjing, Kina [email protected] | [email protected]
33-99No. Mufu E Rd. Gulou District, Nanjing, Kina [email protected] | [email protected]

En hydraulisk cylinder omdanner hydraulisk energi til lige linje eller lineær mekanisk bevægelse. Når den er forbundet til en bevægelig belastning, udfører den arbejde.
Som introduceret i tidligere kapitler består en hydraulisk cylinder hovedsageligt af et cylinderrør, to lukkede endeplader, en kolben, en kolbestang og ind- og udgangsporte. Hver ende har én port – én til olieindgang og én til olieudgang.
figur 6-1 Standard dobbeltvirkende hydraulisk cylinder. Olien strømmer ind gennem venstre port, hvilket får stangen til at udvide sig; olie gennem højre port trækker den tilbage.
I hele cylinderens slag virker hydraulisk energi på den bevægelige kolbe. Trykket, der frembringes af denne hydrauliske energi, overstiger ikke modstanden fra belastningen. For en cylinder med kendte dimensioner skal vi vide, hvilket arbejdstryk der frembringer en bestemt udgangskraft. Dette kan bestemmes (idet friktion ignoreres) ved hjælp af følgende formel:
Tryk = Kraft ÷ Areal
Når denne formel anvendes, er enten arealet og trykket givet for at finde udgangskraften, eller også er arealet og udgangskraften kendt for at finde trykket. I praksis kender vi normalt cylinderens boordiameter og skal beregne kolbearealet – men at beregne arealet af en cirkel er lige så simpelt som at beregne arealet af et kvadrat.
Arealet af en cirkel svarer til ca. 78,54 % af arealet af et kvadrat, hvis side er lig med cirklens diameter. Mere præcist:
Cirkelareal = Diameter² × 0,7854
En anden almindeligt anvendt formel:
Cirkelareal = π × D² ÷ 4

Figur 6-2 Cirkelareal = D² × 0,7854. Denne simple formel anvendes konstant ved beregninger af hydrauliske cylinder.
Afstanden, hvover hvilken hydraulisk energi virker, afgør, hvor meget arbejde der udføres — denne afstand er cylinderens slaglængde. Som nævnt tidligere ser det ud, som om brugen af hydraulisk tryk til at forstærke en kraft ikke koster noget. I nogle specifikke situationer — når systemet er i hvile — kan en lille kraft frembringe en meget stor kraft uden synlig afvejning. Men hvis denne forstærkede kraft også medfører bevægelse, sker der en afvejning: afstand.
Hver hydraulisk cylinder har et volumen (fortrængning), der svarer til dens slaglængde (i tommer) ganget med dens kolbeareal (i tommer²), hvilket giver et volumen i tommer³ (cm³).
Cylindervolumen = Kolbeareal × Slaglængde
(tommer³) = (tommer²) × (tommer) eller (cm³) = (cm²) × (cm)
Eksempel: Den øverste kolben skal bevæge sig 2 tommer (5,08 cm), for at den nederste cylinderkolbe bevæger sig 1 tomme (2,54 cm). Begge kolber udfører samme arbejde. Den øverste kolbe forskyder 20 kubiktommer (327,8 cm³) væske – og den nederste cylinderkolbe forskydes af samme mængde væske på 20 kubiktommer (327,8 cm³).
Hastigheden af en hydraulisk cylinderkolbestang afhænger af, hvor hurtigt væske fylder kammeret bag kolben. Formler til beregning af kolbestangens hastighed:
Kolbestangens hastighed (tommer/min) = Strømningshastighed (gpm) × 231 ∕ Kolbeareal (tommer²)
Kolbestangens hastighed (m/s) = Strømningshastighed (L/min) × 0,1667 ∕ Kolbeareal (cm²)

En hydraulisk motor er en aktuator, der omdanner hydraulisk energi til roterende mekanisk energi. Denne roterende energi overføres til en belastning via drivakslen.
Alle hydrauliske motorer består i princippet af et hus med indgangs- og udgangsporte samt en roterende enhed, der er forbundet til drivakslen.
Eksemplet vist er en vane-type hydraulisk motor. Den roterende samling består af en rotor og lameller, der kan bevæge sig frit ind og ud af rotorernes slåer. Den roterende samling er monteret ekscentrisk inden i huset; drivakslen forbinder til belastningen. Når trykolie trænger ind i indløbskammeret, virker den hydrauliske energi på den udsatte lameloverflade i indløbskammeret. Da arealet af den øverste lamel, der er udsat for trykolie, er større, er kraften på rotoren ubalanceret – rotoren drejer.
Når olien når udgangskammeret med aftagende volumen, bliver den afgivet.
Bemærk: Før denne type motor kan fungere normalt, skal lamellerne være udfoldet og skal have en pålidelig tætning mod huset. I modsætning til en hydraulisk pumpe kan lamellerne ikke skubbes ud af centrifugalkraften – metoden til at udfolde motorlamellerne vil blive beskrevet i et senere kapitel.
Figur 6-6: Funktionsprincip for skovlmotor. Trykolie virker på skovlens flader. Da den øverste trykudsatte skovlareal er større end det nederste trykudsatte skovlareal, resulterer den resulterende kraft i en rotation af rotoren.
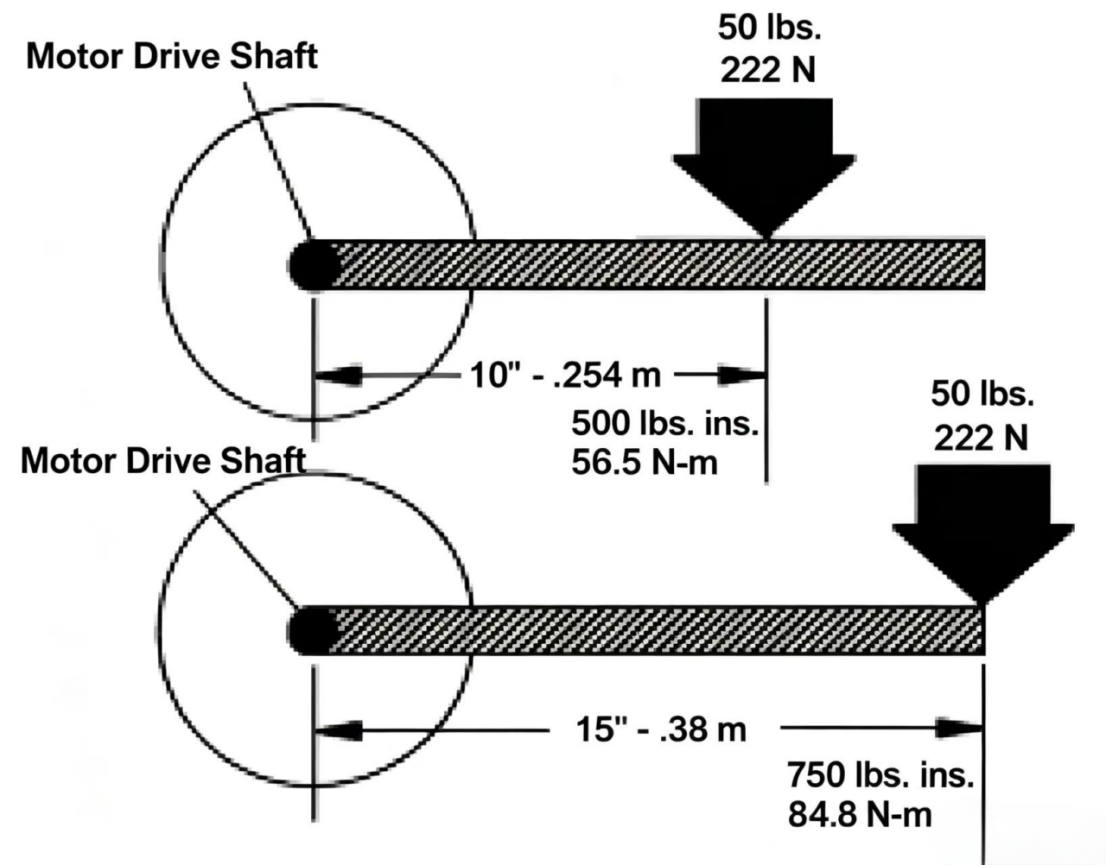
Drejningsmoment er en roterende eller vridende kraft. Drejningsmoment er en kraft, der virker på en afstand fra en aksels centerlinje. Enhed for drejningsmoment er lb.in. (eller Nm).
Drejningsmoment angiver kraftens placering i forhold til hydraulikmotorens aksels centerlinje. Formlen for drejningsmoment er:
Drejningsmoment = Kraft × Afstand fra akselcenter
(lb.in.) = (lbs) × (in.) eller (Nm) = (N) × (m)
Eksempel fra figuren: En kraft på 50 lbs (222 N) virker på en krumtap, der er forbundet til motorakslen. Afstanden mellem akslens centrum og kraften er 10 tommer (0,254 m). Den resulterende drejningsmoment på akslen er 500 tommer-lbs (56,5 Nm). Hvis den samme kraft på 50 lbs (222 N) virker langs en krumtaparm på 15 tommer (0,38 m), er drejningsmomentet på akslen 750 tommer-lbs (84,6 Nm). Jo længere væk fra akslens centrum kraften virker, jo større er drejningsmomentet. Bemærk, at drejningsmoment ikke involverer nogen bevægelse.
En belastning, der er forbundet til motorakslen, frembringer drejningsmoment som beskrevet ovenfor. For den hydrauliske motor er dette en modstand – den skal overvindes af den hydrauliske tryk, der virker på motorens roterende enhed.
Drejningsmoment (tommer-lbs) = psi × Motorfortrængning (tommer³) ÷ (2 × π)
Drejningsmoment (Nm) = bar × Motorfortrængning (cm³) ÷ (20 × π)
Hydraulisk motors akselhastighed bestemmes af, hvor hurtigt væske tilføres. Formlen er:
Motorens hastighed (omdr./min.) = Strømningshastighed (gallons/min.) × 231 ÷ Motorfortrængning (tommer³/omdrejning)
Motorens omdrejningshastighed (rpm) = Strømningshastighed (L/min) × 1000 / Motorens slagvolumen (ml/omdrejning)
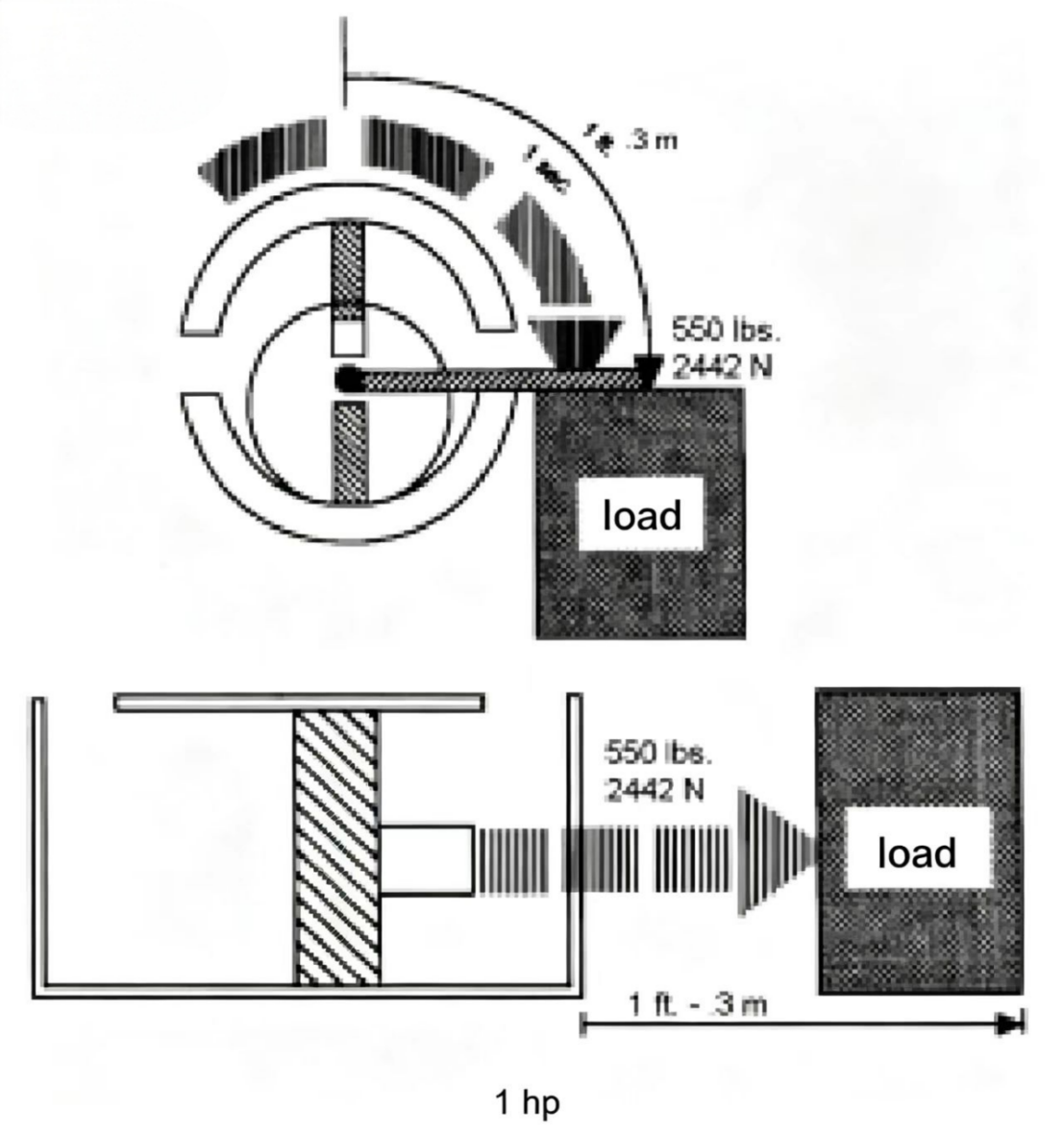
I tidligere kapitler lærte vi, at effekt er arbejdshastigheden, dvs. hk = ft·lbs/tid eller W = J/tid.
Vi ved også, at hestekraft (hk) eller watt (W) er enheden for effekt. Hvis en hydraulisk cylinder eller en hydraulisk motor driver en last med en mekanisk kraft på 550 lbs (2.442 N) og flytter den 1 ft (0,30 m) på 1 sekund, er der brugt 1 hk (746 W) effekt. Hvis det samme arbejde (550 ft·lbs / 746 J) udføres på et halvt sekund, fordobles arbejdshastigheden, og effekten bliver 2 hk (1.490 W).
Den mekaniske effekt, der overføres fra en cylinder eller motor til en belastning, svarer til den hydrauliske effekt, der kræves af cylinderen eller motoren. For et hydraulisk system, der udfører arbejde med en hastighed på 550 ft·lbs pr. sekund (746 J), er dens hydrauliske effekt 1 hk (746 W). I den mekaniske effektfomel erstattes dog "ft (m)" og "lbs (N)" af de hydrauliske størrelser "psi (bar)" og "gpm (L/min)". En omregningsfaktor anvendes i beregninger af hydraulisk effekt for at udtrykke forholdet mellem gpm, psi, ft og lbs (eller L/min, bar, m og N).
For at beregne effekten af en hydraulisk cylinder eller det samlede hydrauliske system:
hk = gpm × psi × 0,000583
W = hk × 746
W = (5/3) × L/min × bar
For at beregne den hydrauliske motors afgivne effekt:
hk = omdr./min × drejningsmoment (in·lbs) / 63.025
kW = omdr./min × drejningsmoment (Nm) / 9.543
Indtil nu har vi diskuteret hydrauliske motorer med roterende udgang og hydrauliske cylindre med lineær udgang. Nu vil vi diskutere en anden type aktuator, der producerer rotation inden for en begrænset vinkel. Denne type kaldes en oscillationscylinder eller oscillationsmotor. Dens konstruktion er kompakt, simpel og effektiv – den leverer høj drejningsmoment og kræver kun et lille installationsområde samt let installation.
Oscillationsaktuatorer anvendes til positionsbestemmelse på værktøjsmaskiner, bøjeoperationer, løftning eller rotation af tunge genstande, vendning, positionering, maskinfiksering, søfartskontrol, ventilbetjening osv.
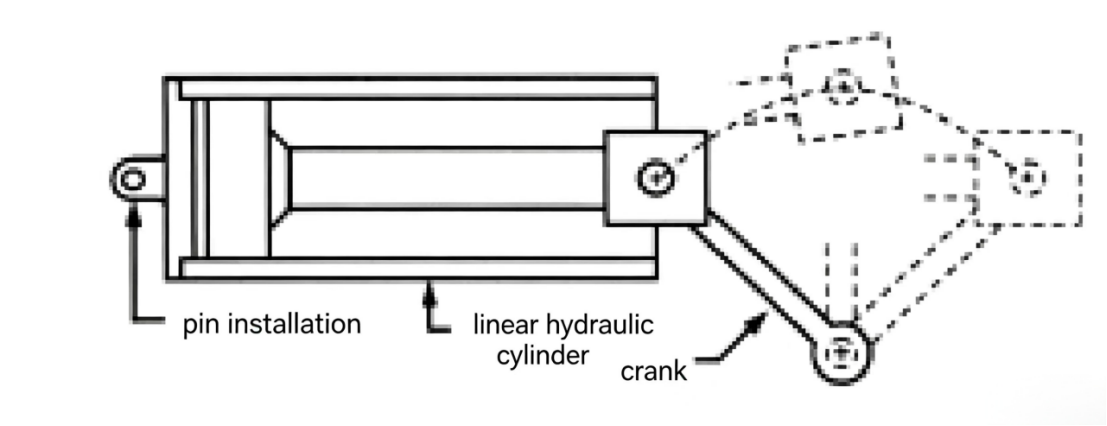
Der findes mange typer oscillationscylindre. Den simpleste er en oscillationsmekanisme drevet af en lineær hydraulisk cylinder, hvor cylinderkroppens ende er monteret med en bolt, og stempelstangen forbinder til en krumtap, der driver en aksel til rotation. Denne oscillationscylinder kan styres af en 4-vejs rettningsventil med grænsekontakter ved hver ende af slaglængden.
Ligesom alle mekaniske enheder har denne lineære, cylindervirkende oscillationsaktuator nogle grundlæggende egenskaber, herunder at den kan samles af standardkomponenter, hvilket giver konstruktører stor fleksibilitet og holder omkostningerne lave takket være lettilgængelige reservedele.
Denne type oscillationsaktuator har dog også uønskede egenskaber: stempelstangen er ikke beskyttet og kommer direkte i kontakt med omgivelserne, især da krummeleddet normalt ikke er forseglet, hvilket skaber sikkerhedsrisici. Desuden påvirkes drivakslen typisk af store tværlaster, hvilket fører til tidlig svigt, overdreven slid og klemning.
For denne specifikke type oscillationsaktuator skal hydraulikcylinderen kunne svinge frit, så den skal bruge fleksible slangeforbindelser, og gennem hele cylinderens slag er udgangsmomentet ikke konstant.
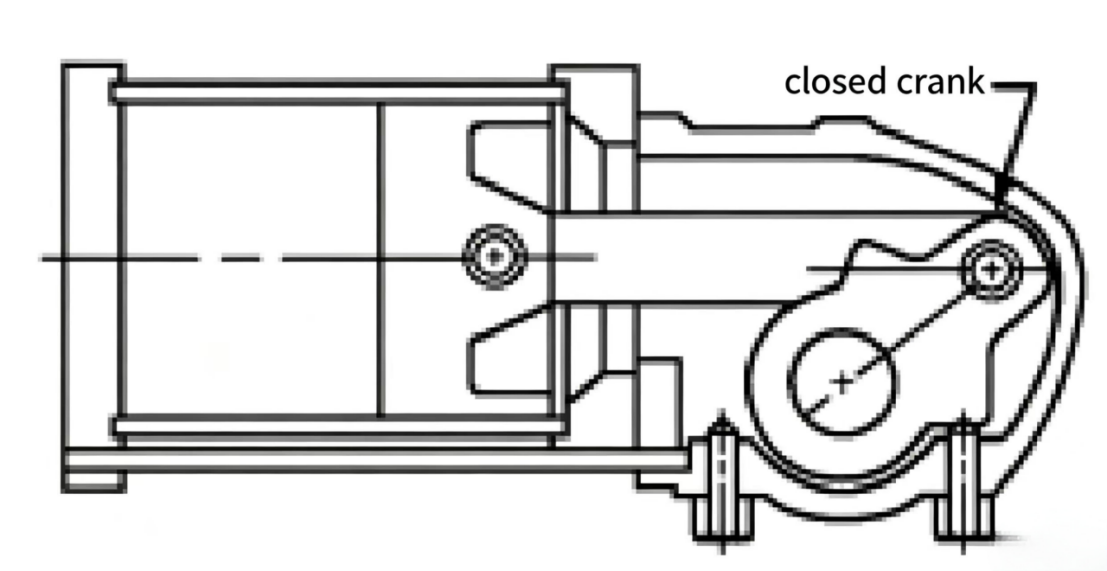
Den indkapslede svingecylinder er meget lignende den lineære cylinderbaserede svingemekanisme ovenfor. Den indkapslede cylinder har en beskyttelsesdæksel, der omslutter stemmelangen og krumtappen. Drejningsakslen har typisk ekstra lejestøtte for at forhindre alvorlige tværlaste. Denne type kan udstyres med magnetventiler, grænsekontakter eller slagkontakter. Slagområdet kan normalt justeres mellem ca. 85° og 100°.
En anden type er fjederbetjenet svingecylinder, som bruger en hydraulisk cylinder med en returneringsfjeder til at føre drejningsakslen tilbage til dens oprindelige position. Fjederbetjente svingecylindre kan udgive drejningsmomenter op til 5.000 in.lbs (565 Nm).

Den mest almindelige svingecylinder er tandstang-og-tandhjuls-typen. Denne type kan opretholde konstant udgangsmoment i begge retninger gennem hele rotationen. I denne konfiguration virker hydraulisk tryk på kolben, hvilket presser tandstangen, der er forbundet til kolben, og driver tandhjulet til at rotere akslen. Standard tandstang-og-tandhjuls-cylindre har rotationsstrøg på 90°, 180°, 360° eller endda større. Udgangsmomentet for tandstang-og-tandhjuls-cylindre kan nå op til 52.000.000 in.lbs (5.876.000 Nm).

Der findes også en vinge-svingemotor. Denne type kan være entenkantet eller flerkantet. En entenkantet motor kan rotere 280°; en tokantet motor kan rotere 200°. Udgangsmomentet for en tokantet motor er dobbelt så stort som for en entenkantet motor. Denne type svingemotor kan opnå udgangsmomenter op til 500.000 in.lbs (Nm).

Der findes en anden type oscillationsmotor, der genererer drejningsmoment ved hjælp af en spiralformet splinemekanisme. Ændringer i splinelængden og -stigningen gør det muligt at variere rotationshøjden over et bredt område. Denne type oscillationsmotor har én spiralformet splinakse med en indvendigt splinet kolbesleeve på aksen – kolbesleevens rotation begrænses af vejledningsstænger. Når kolbesleeven bevæger sig indeni cylinderen, driver den splinaksen til at rotere. Standard rotationshøjder er 90°, 180°, 270° og 360°, med outputdrejningsmomenter op til 1.000.000 in.lbs (13.000 Nm).
Kæde- og tandhjulsoscillationsmotorer bruger kolber, kæder og tandhjul til at drive aksen. Denne aktuator har typisk én stor kolbe (som drivenhed) til at trække kæden samt en lille kolbe til at forhindre olie fra at lekke ud gennem returkædens rute. Outputdrejningsmomenter kan nå ca. 23.000 in.lbs (2.599 Nm), og drivaksens rotation kan nå fem fulde omdrejninger eller 1.800°.
For at vælge den mest velegnede oscillationscylinder til en specifik anvendelse indgår der flere faktorer, herunder drejningsmoment, hastighed og betjeningsmetode. Vi beskriver den praktiske udvælgelse af oscillationsmotorer i et andet kapitel og diskuterer yderligere, hvordan man afgør, om der skal bruges enkelt- eller dobbeltvirkende cylinder, om lukket-loop-positionering er nødvendig, om dæmpning er påkrævet osv. Der vil også blive analyseret driftsfrekvensen eller cyklusperioden.
Aktuatorhastigheden er en funktion af gennemstrømningshastigheden (gpm (L/min))
Den lineære hastighed af en hydraulisk cylinders stempelstang afhænger af den hastighed, hvormed pumpen tilfører væske til cylinderens stempelkammer (gpm (L/min)). Den roterende hastighed af en hydraulisk motors drivaksel afhænger af gennemstrømningshastigheden (gpm (L/min)), der tilføres den hydrauliske motor.
Aktuatorudgangskraften er en funktion af trykket (psi (bar))
Udgangskraften fra en cylinder udtrykkes i psi (bar) — udgangskraften på en motors drejningsakse bestemmes af trykket, der virker på den eksponerede areal af motorens roterende samling. Den effekt, der produceres af en aktuator, er en funktion af aktuatorhastigheden ganget med aktuatorens udgangskraft.
For cylindre udtrykkes udgangskraften i psi, og stempelstangens hastighed i gpm. Konstanten 0,000583 beskriver forholdet mellem psi, gpm og effekt. For motorer udtrykkes udgangskraften som drejningsmoment, og motors driftshastighed i rpm. Konstanten 63.025 beskriver forholdet mellem rpm, drejningsmoment og effekt.

Velkommen til HOVOO, et kinesisk sigillfabrik. Produktion af PU, gummi og PTFE-sigiller. Sigillerne omfatter O-ring, piston sigill, stålsøjle sigill, Gray ring og gas sigill.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}