33-99 No. Mufu E Rd. Distrito de Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Mufu E Rd. Distrito de Gulou, Nanjing, China [email protected] | [email protected]

Un cilindro hidráulico convierte la energía hidráulica en movimiento mecánico rectilíneo o lineal. Al conectarse a una carga móvil, realiza trabajo.
Como se introdujo en capítulos anteriores, un cilindro hidráulico consta principalmente de un cuerpo cilíndrico, dos tapas extremas cerradas, un pistón, una varilla de pistón y puertos de entrada y salida. Cada extremo tiene un puerto: uno para la entrada de aceite y otro para su salida.
figura 6-1: Cilindro hidráulico estándar de doble efecto. El aceite entra por el puerto izquierdo, haciendo que la varilla se extienda; el aceite que entra por el puerto derecho la retrae.
Durante toda la carrera del cilindro, la energía hidráulica actúa sobre el pistón móvil. La presión generada por dicha energía hidráulica no superará la resistencia producida por la carga. Para un cilindro de dimensiones conocidas, debemos saber qué presión de trabajo genera una fuerza de salida específica. Esto puede determinarse (despreciando la fricción) mediante la siguiente fórmula:
Presión = Fuerza ÷ Área
Al utilizar esta fórmula, o bien se conocen el área y la presión para calcular la fuerza de salida, o bien se conocen el área y la fuerza de salida para hallar la presión. En la práctica, normalmente conocemos el diámetro del cilindro y necesitamos calcular el área del pistón; sin embargo, calcular el área de un círculo es tan sencillo como calcular el área de un cuadrado.
El área de un círculo equivale aproximadamente al 78,54 % del área de un cuadrado cuyo lado es igual al diámetro del círculo. Más exactamente:
Área del círculo = Diámetro² × 0,7854
Otra fórmula comúnmente utilizada:
Área del círculo = π × D² ÷ 4

Figura 6-2 Área del círculo = D² × 0,7854. Esta fórmula sencilla se utiliza constantemente en los cálculos de cilindros hidráulicos.
La distancia sobre la que actúa la energía hidráulica determina la cantidad de trabajo realizado; esta distancia es la carrera del cilindro. Como se señaló anteriormente, utilizar la presión hidráulica para amplificar una fuerza parece no tener ningún costo. En algunas situaciones específicas —cuando el sistema está en estado estático—, una fuerza pequeña puede producir una fuerza muy grande sin aparente sacrificio. Sin embargo, si esta fuerza amplificada también provoca un desplazamiento, se sacrifica algo: la distancia.
Todo cilindro hidráulico tiene un volumen (desplazamiento) igual a su carrera (pulgadas) multiplicada por el área del émbolo (pulgadas²), lo que da un volumen en pulgadas³ (cm³).
Volumen del cilindro = Área del émbolo × Carrera
(pulg³) = (pulg²) × (pulg) o (cm³) = (cm²) × (cm)
Ejemplo: El pistón superior debe desplazarse 2 pulg. (5,08 cm) para que el pistón del cilindro inferior se desplace 1 pulg. (2,54 cm). Ambos pistones realizan el mismo trabajo. El pistón superior desplaza 20 pulg.³ (327,8 cm³) de fluido, y el pistón del cilindro inferior es desplazado por esa misma cantidad de fluido: 20 pulg.³ (327,8 cm³).
La velocidad de la varilla de un cilindro hidráulico depende de la rapidez con la que el fluido llena la cámara situada detrás del pistón. Fórmulas para la velocidad de la varilla del pistón:
Velocidad de la varilla (pulg./min) = Caudal (gpm) × 231 ÷ Área del pistón (pulg.²)
Velocidad de la varilla (m/s) = Caudal (L/min) × 0,1667 ÷ Área del pistón (cm²)

Un motor hidráulico es un actuador que convierte la energía hidráulica en energía mecánica rotatoria. Esta energía rotatoria se aplica a una carga mediante el eje de transmisión.
Todos los motores hidráulicos constan esencialmente de una carcasa con puertos de entrada y salida, y un conjunto giratorio conectado al eje de transmisión.
El ejemplo mostrado es un motor hidráulico de paletas. El conjunto giratorio consta de un rotor y paletas que pueden deslizarse libremente hacia dentro y hacia fuera de las ranuras del rotor. El conjunto giratorio está montado excéntricamente dentro de la carcasa; el eje de transmisión se conecta a la carga. Cuando el aceite a presión entra en la cámara de entrada, la energía hidráulica actúa sobre la cara expuesta de la paleta en dicha cámara. Dado que el área de la paleta superior expuesta al aceite a presión es mayor, la fuerza ejercida sobre el rotor resulta desequilibrada, lo que provoca la rotación del rotor.
A medida que el aceite llega a la cámara de salida con un volumen decreciente, es expulsado.
Nota: Para que este tipo de motor funcione correctamente, las paletas deben estar extendidas y deben sellar de forma fiable contra la carcasa. A diferencia de una bomba hidráulica, las paletas no pueden ser empujadas hacia afuera por la fuerza centrífuga; el método para extender las paletas del motor se tratará en un capítulo posterior.
Figura 6-6 Funcionamiento del motor de paletas. El aceite a presión actúa sobre las caras de las paletas. Dado que el área superior de la paleta expuesta a la presión es mayor que el área inferior de la paleta, la fuerza neta hace girar el rotor.
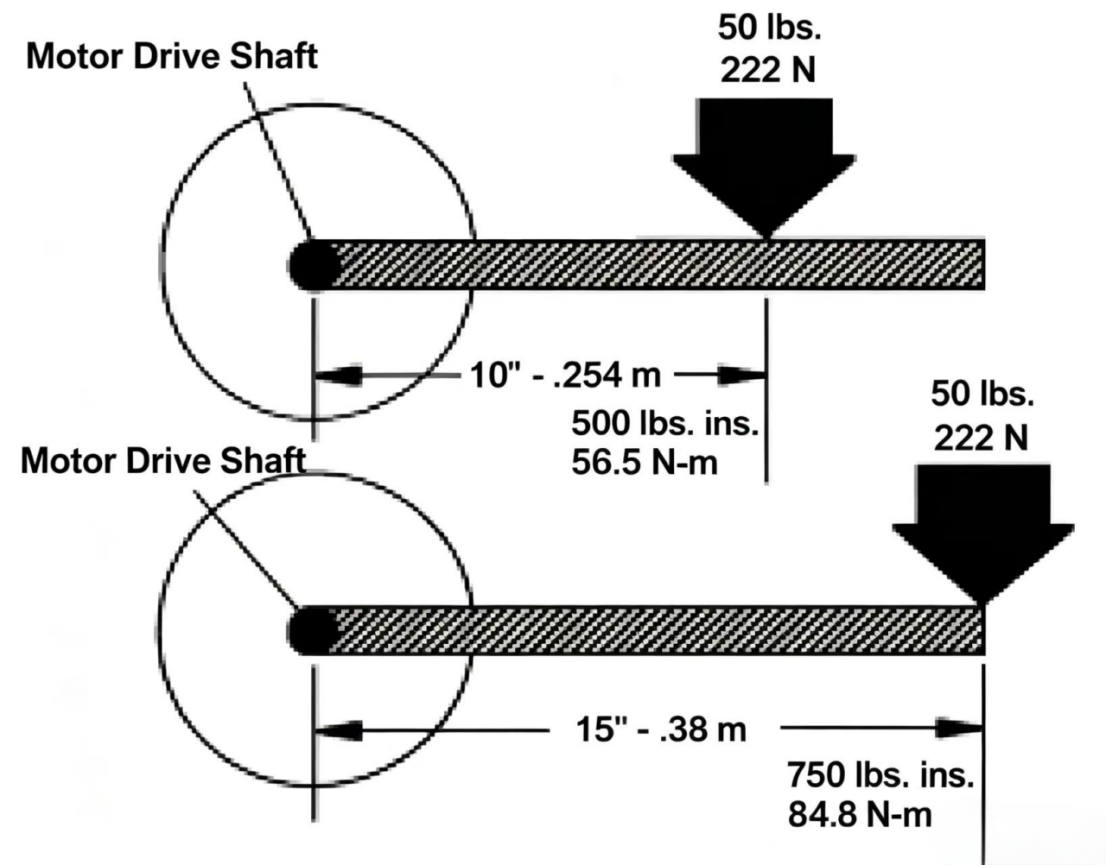
El par es una fuerza de rotación o torsión. El par es una fuerza que actúa a una distancia del eje central del árbol. La unidad de par es lb·in. (o N·m).
El par nos indica la posición de la fuerza respecto al eje central del motor hidráulico. La fórmula del par es:
Par = Fuerza × Distancia desde el eje central
(lb·in.) = (lb) × (in.) o (N·m) = (N) × (m)
Ejemplo de la figura: Una fuerza de 50 libras (222 N) actúa sobre una manivela conectada al eje del motor. La distancia entre el centro del eje y el punto de aplicación de la fuerza es de 10 pulgadas (0,254 m). El par de torsión resultante sobre el eje es de 500 pulgadas-libra (56,5 Nm). Si la misma fuerza de 50 libras (222 N) actúa sobre una manivela de 15 pulgadas (0,38 m), el par de torsión sobre el eje es de 750 pulgadas-libra (84,6 Nm). Cuanto mayor sea la distancia desde el centro del eje hasta el punto de aplicación de la fuerza, mayor será el par de torsión. Obsérvese que el par de torsión no implica ningún movimiento.
Una carga conectada al eje de accionamiento del motor genera un par de torsión tal como se describe anteriormente. En el caso del motor hidráulico, esto representa una resistencia que debe ser superada mediante la presión hidráulica que actúa sobre el conjunto giratorio del motor.
Par de torsión (pulgadas-libra) = psi × Desplazamiento del motor (pulg³) ÷ (2 × π)
Par de torsión (Nm) = bar × Desplazamiento del motor (cm³) ÷ (20 × π)
La velocidad del eje de un motor hidráulico está determinada por la rapidez con la que se inyecta el fluido. La fórmula es:
Velocidad del motor (rpm) = Caudal (gpm) × 231 ÷ Desplazamiento del motor (pulg³/rev)
Velocidad del motor (rpm) = Caudal (L/min) × 1000 ÷ Desplazamiento del motor (mL/rev)
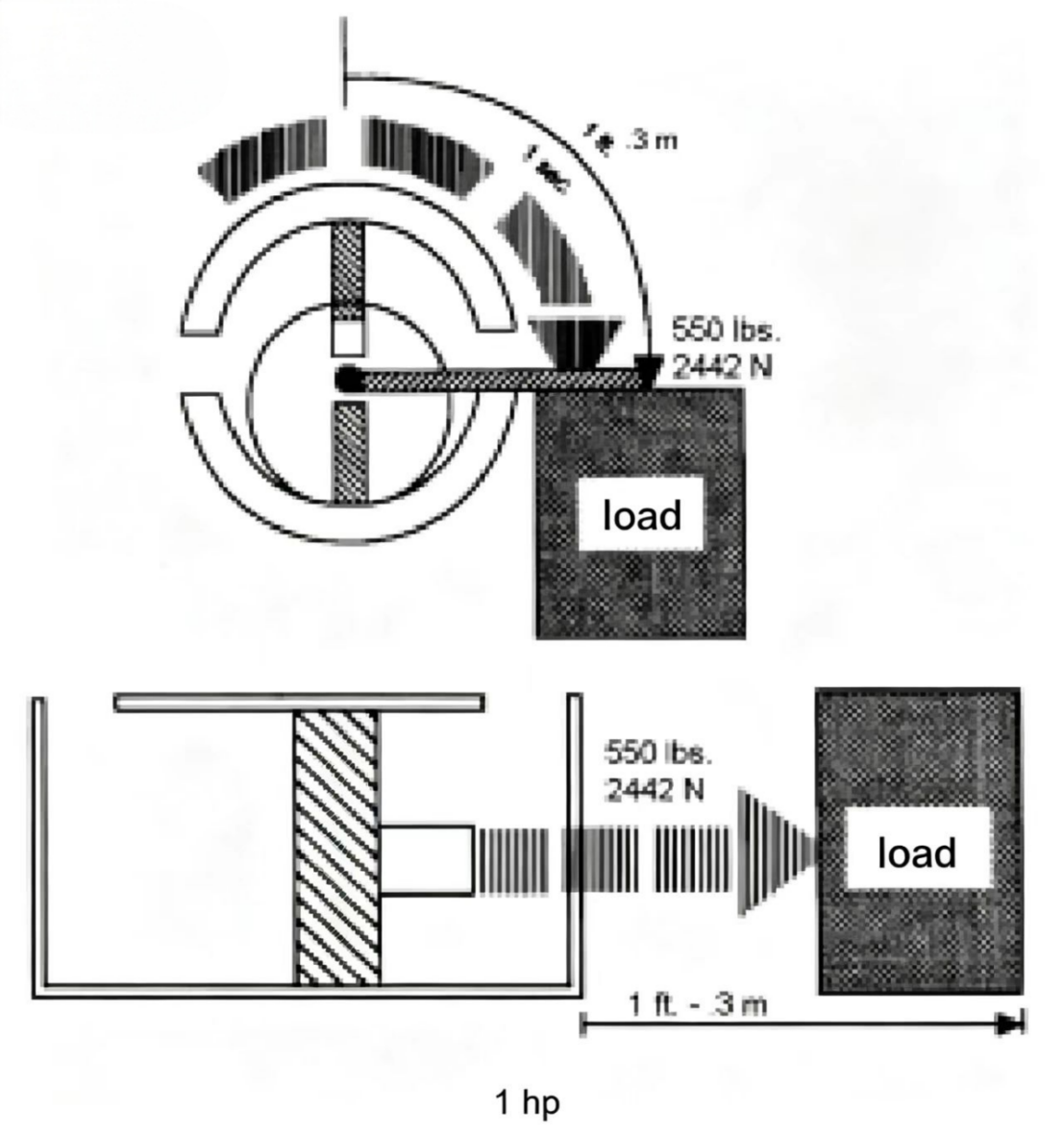
En capítulos anteriores aprendimos que la potencia es la tasa a la que se realiza un trabajo, es decir, hp = pies·libras/tiempo o W = J/tiempo.
También sabemos que el caballo de fuerza (hp) o el vatio (W) es la unidad de potencia. Si un cilindro hidráulico o un motor hidráulico mueve una carga con una fuerza mecánica de 550 libras (2.442 N) y la desplaza 1 pie (0,30 m) en 1 segundo, ha consumido 1 hp (746 W) de potencia. Si se realiza el mismo trabajo (550 pies·libras / 746 J) en medio segundo, la velocidad de trabajo se duplica y la potencia es de 2 hp (1.490 W).
La potencia mecánica transmitida por un cilindro o motor a una carga equivale a la potencia hidráulica requerida por el cilindro o motor. Para un sistema hidráulico que realiza trabajo a una velocidad de 550 pies-libra por segundo (746 J), su potencia hidráulica es de 1 hp (746 W). Sin embargo, en la fórmula de potencia mecánica, «pies (m)» y «libras (N)» se sustituyen por los términos hidráulicos «psi (bar)» y «gpm (Lpm)». En los cálculos de potencia hidráulica se utiliza un factor de conversión para expresar la relación entre gpm, psi, pies y libras (o Lpm, bar, m y N).
Para calcular la potencia de un cilindro hidráulico o de todo el sistema hidráulico:
hp = gpm × psi × 0,000583
W = hp × 746
W = (5/3) × Lpm × bar
Para calcular la potencia de salida de un motor hidráulico:
hp = rpm × Par (lb·pulg) / 63 025
kW = rpm × Par (N·m) / 9 543
Hasta ahora hemos analizado motores hidráulicos con salida rotativa y cilindros hidráulicos con salida lineal. Ahora trataremos otro tipo de actuador que produce una rotación de ángulo limitado. Este tipo se denomina cilindro oscilante o motor oscilante. Su estructura es compacta, sencilla y eficiente: genera un par elevado y requiere únicamente un pequeño espacio de instalación, además de facilitar su montaje.
Los actuadores oscilantes se utilizan en el indexado de máquinas-herramienta, operaciones de doblado, elevación o rotación de objetos pesados, volteo, posicionamiento, fijaciones para mecanizado, controles náuticos, accionamiento de válvulas, etc.
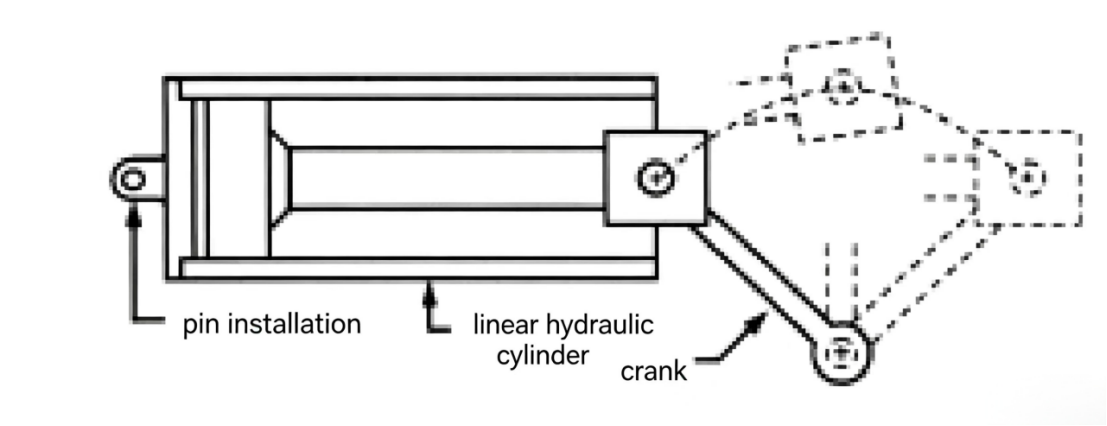
Existen muchos tipos de cilindros oscilantes. El más sencillo es un mecanismo oscilante accionado por un cilindro hidráulico lineal, en el que el extremo del cuerpo del cilindro se monta mediante un pasador y la varilla del pistón se conecta a una manivela que impulsa un eje para que gire. Este cilindro oscilante puede controlarse mediante una válvula direccional de cuatro vías, con finales de carrera equipados con interruptores de límite.
Como todos los dispositivos mecánicos, este actuador oscilante basado en cilindros lineales presenta algunas características fundamentales, entre ellas que puede ensamblarse con componentes estándar de catálogo, lo que otorga a los diseñadores una gran flexibilidad y mantiene bajos los costos gracias a la fácil disponibilidad de piezas de repuesto.
Sin embargo, este tipo de actuador oscilante también presenta características indeseables: la varilla del pistón no está protegida y entra en contacto directo con el entorno circundante, especialmente porque, por lo general, el mecanismo de biela no está sellado, lo que genera riesgos para la seguridad. Asimismo, el eje de accionamiento suele soportar cargas laterales elevadas, provocando fallos prematuros, desgaste excesivo y agarrotamiento.
Para este tipo específico de actuador oscilante, el cilindro hidráulico debe poder oscilar libremente, por lo que debe emplear conexiones mediante mangueras flexibles; además, durante todo el recorrido del cilindro, el par de salida no es constante.
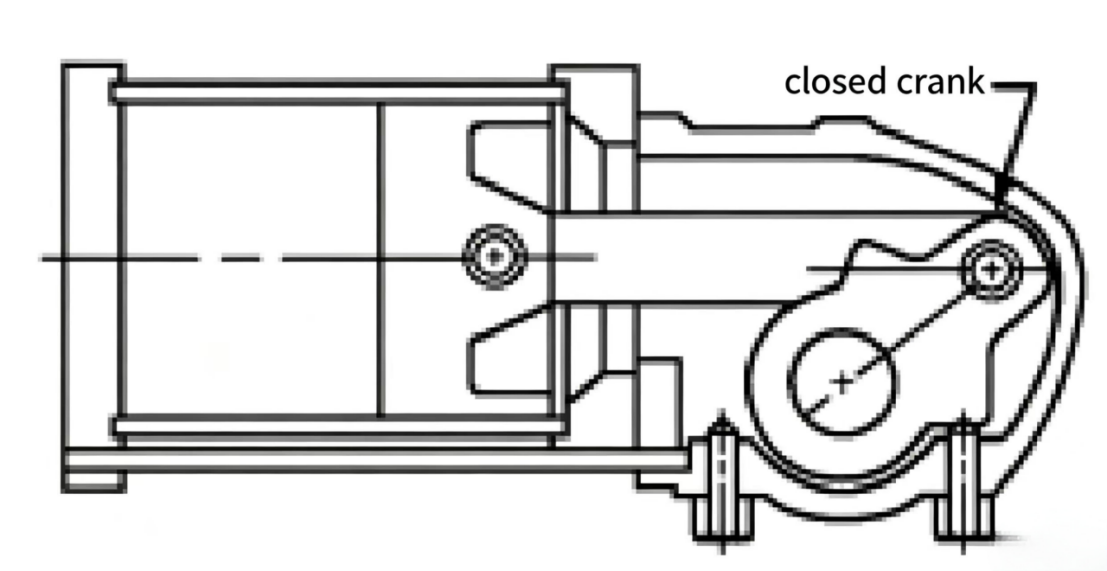
El cilindro oscilante cerrado es muy similar al mecanismo oscilante basado en cilindro lineal descrito anteriormente. El cilindro cerrado dispone de una cubierta protectora que envuelve la varilla del pistón y la manivela. El eje de accionamiento suele contar con soportes adicionales de rodamiento para evitar cargas laterales severas. Este tipo puede equiparse con válvulas solenoide, finales de carrera o interruptores de recorrido. El rango de giro suele ajustarse normalmente entre aproximadamente 85° y 100°.
Otro tipo es el cilindro oscilante de retorno por muelle, que utiliza un cilindro hidráulico con un muelle de retorno para llevar el eje de accionamiento a su posición original. Los cilindros oscilantes de retorno por muelle pueden generar pares de hasta 5.000 in·lb (565 N·m).

El cilindro oscilante más común es el tipo cremallera-piñón. Este tipo puede mantener un par de salida constante en ambas direcciones durante toda la rotación completa. En esta configuración, la presión hidráulica actúa sobre el pistón, empujando la cremallera conectada al pistón, lo que hace girar el engranaje piñón y, con ello, el eje. Los cilindros estándar de tipo cremallera-piñón tienen recorridos de rotación de 90°, 180°, 360° o incluso mayores. El par de salida de los cilindros de tipo cremallera-piñón puede alcanzar 52 000 000 in·lb (5 876 000 N·m).

También existe disponible un motor oscilante de paleta. Este tipo puede ser de una sola paleta o de múltiples palas. Un motor de una sola paleta puede rotar 280°; un motor de doble paleta puede rotar 200°. El par de salida de un motor de doble paleta es el doble que el de uno de simple paleta. Este tipo de motor oscilante puede alcanzar pares de salida de hasta 500 000 in·lb (N·m).

Existe otro tipo de motor oscilante que genera par mediante un mecanismo de ranura helicoidal. Las variaciones en la longitud y el paso de la ranura permiten que la carrera de rotación se ajuste en un amplio rango. Este tipo de motor oscilante consta de un eje con ranura helicoidal y una camisa de pistón con ranuras internas montada sobre dicho eje; la rotación de la camisa de pistón está restringida por varillas guía. Cuando la camisa de pistón se desplaza dentro del cilindro, impulsa la rotación del eje ranurado. Las carreras de rotación estándar son de 90°, 180°, 270° y 360°, con pares de salida de hasta 1 000 000 in·lb (13 000 N·m).
Los motores oscilantes de cadena y piñón utilizan pistones, cadenas y piñones para impulsar el eje. Este actuador suele incorporar un pistón grande (como dispositivo de accionamiento) que tira de la cadena, y un pistón pequeño que evita que el aceite se fugue por la trayectoria de retorno de la cadena. Los pares de salida pueden alcanzar aproximadamente 23 000 in·lb (2 599 N·m), y la rotación del eje de accionamiento puede llegar a cinco vueltas completas o 1 800°.
Para seleccionar el cilindro oscilante más adecuado para una aplicación específica, intervienen factores como el par, la velocidad y el método de funcionamiento. La selección práctica de motores oscilantes se describirá en otro capítulo, donde además se analizará cómo determinar si se requiere acción sencilla o doble, si es necesario utilizar posicionamiento en bucle cerrado, si se necesita amortiguación, etc. Asimismo, se examinará la frecuencia de operación o el período del ciclo.
La velocidad del actuador es una función del caudal (gpm [L/min])
La velocidad lineal de la varilla del pistón de un cilindro hidráulico depende de la velocidad a la que la bomba inyecta fluido en la cámara del pistón del cilindro (gpm [L/min]). La velocidad de rotación del eje de accionamiento de un motor hidráulico depende del caudal (gpm [L/min]) inyectado en el motor hidráulico.
La fuerza de salida del actuador es una función de la presión (psi [bar])
La fuerza de salida de un cilindro se expresa en psi (bar); la fuerza de salida en el eje de accionamiento de un motor se determina mediante la presión que actúa sobre el área expuesta del conjunto giratorio del motor. La potencia generada por un actuador es una función de la velocidad del actuador multiplicada por su fuerza de salida.
En los cilindros, la fuerza de salida se expresa en psi y la velocidad de la varilla del pistón en gpm. La constante 0,000583 describe la relación entre psi, gpm y potencia. En los motores, la fuerza de salida se expresa en par motor y la velocidad de funcionamiento del motor en rpm. La constante 63 025 describe la relación entre rpm, par motor y potencia.

Bienvenido a HOVOO, una fábrica de sellos china. Producción de sellos de PU, goma y PTFE. Los sellos incluyen anillo O, sello de pistón, sello de varilla, anillo Gray y sello de gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}