33-99 No. Rue E Mufu, District de Gulou, Nanjing, Chine [email protected] | [email protected]
33-99 No. Rue E Mufu, District de Gulou, Nanjing, Chine [email protected] | [email protected]

Un vérin hydraulique convertit l'énergie hydraulique en un mouvement mécanique rectiligne ou linéaire. Connecté à une charge mobile, il effectue un travail.
Comme introduit dans les chapitres précédents, un vérin hydraulique se compose principalement d’un corps cylindrique, de deux bouchons fermés aux extrémités, d’un piston, d’une tige de piston et de raccords d’entrée et de sortie. Chaque extrémité comporte un raccord — l’un pour l’huile entrante, l’autre pour l’huile sortante.
figure 6-1 : Vérin hydraulique standard à double effet. L’huile pénètre par le raccord gauche, ce qui provoque l’allongement de la tige ; l’huile entrant par le raccord droit la rétracte.
Pendant toute la course du vérin, de l'énergie hydraulique agit sur le piston mobile. La pression générée par cette énergie hydraulique ne dépassera pas la résistance exercée par la charge. Pour un vérin de dimensions connues, il est nécessaire de déterminer la pression de fonctionnement qui produit une force de sortie spécifique. Celle-ci peut être calculée (en négligeant les frottements) à l’aide de la formule suivante :
Pression = Force ÷ Surface
Lors de l’utilisation de cette formule, soit la surface et la pression sont données afin de déterminer la force de sortie, soit la surface et la force de sortie sont connues afin de déterminer la pression. En pratique, on connaît généralement le diamètre de l’alésage du vérin et l’on doit calculer la surface du piston — or, calculer la surface d’un cercle est tout aussi simple que calculer la surface d’un carré.
La surface d’un cercle représente environ 78,54 % de la surface d’un carré dont le côté est égal au diamètre du cercle. Plus précisément :
Surface d’un cercle = Diamètre² × 0,7854
Une autre formule couramment utilisée :
Surface d’un cercle = π × D² ÷ 4

Figure 6-2 Surface du cercle = D² × 0,7854. Cette formule simple est constamment utilisée dans les calculs des vérins hydrauliques.
La distance sur laquelle agit l’énergie hydraulique détermine la quantité de travail effectué — cette distance correspond à la course du vérin. Comme mentionné précédemment, l’utilisation de la pression hydraulique pour amplifier une force semble ne rien coûter. Dans certaines situations précises — lorsque le système est statique — une petite force peut produire une très grande force sans sacrifice apparent. Toutefois, si cette force amplifiée entraîne également un mouvement, un sacrifice intervient : la distance.
Chaque vérin hydraulique possède un volume (déplacement) égal à sa course (en po) multipliée par la surface de son piston (en po²), ce qui donne un volume en po³ (cm³).
Volume du vérin = Surface du piston × Course
(po³) = (po²) × (po) ou (cm³) = (cm²) × (cm)
Exemple : Le piston supérieur doit se déplacer de 2 po (5,08 cm) pour faire bouger le piston du cylindre inférieur de 1 po (2,54 cm). Les deux pistons effectuent le même travail. Le piston supérieur déplace 20 po³ (327,8 cm³) de fluide — et le piston du cylindre inférieur est déplacé par ce même volume de 20 po³ (327,8 cm³) de fluide.
La vitesse de la tige d’un vérin hydraulique dépend de la rapidité avec laquelle le fluide remplit la chambre située derrière le piston. Formules de calcul de la vitesse de la tige du piston :
Vitesse de la tige (po/min) = Débit (gpm) × 231 / Surface du piston (po²)
Vitesse de la tige (m/s) = Débit (L/min) × 0,1667 / Surface du piston (cm²)

Un moteur hydraulique est un actionneur qui convertit l’énergie hydraulique en énergie mécanique rotative. Cette énergie rotative est transmise à la charge via l’arbre moteur.
Tous les moteurs hydrauliques sont essentiellement constitués d’un boîtier doté de raccords d’entrée et de sortie, ainsi qu’un ensemble rotatif relié à l’arbre moteur.
L'exemple illustré est un moteur hydraulique à palettes. L'ensemble tournant se compose d'un rotor et de palettes pouvant coulisser librement dans les fentes du rotor et en sortir. L'ensemble tournant est monté de façon excentrique à l'intérieur du carter ; l'arbre de sortie est relié à la charge. Lorsque l'huile sous pression pénètre dans la chambre d'admission, l'énergie hydraulique agit sur la face exposée des palettes située dans cette chambre. Comme la surface supérieure des palettes exposée à l'huile sous pression est plus grande, la force exercée sur le rotor est déséquilibrée — le rotor tourne.
Lorsque l'huile atteint la chambre de refoulement, dont le volume diminue, elle est évacuée.
Remarque : Avant que ce type de moteur puisse fonctionner normalement, les palettes doivent être déployées et assurer une étanchéité fiable avec le carter. Contrairement à une pompe hydraulique, les palettes ne peuvent pas être repoussées vers l'extérieur par la force centrifuge — la méthode de déploiement des palettes des moteurs sera abordée dans un chapitre ultérieur.
Figure 6-6 Fonctionnement du moteur à ailettes. L’huile sous pression agit sur les faces des ailettes. Comme la surface supérieure de l’ailette exposée à la pression est plus grande que la surface inférieure, la force résultante fait tourner le rotor.
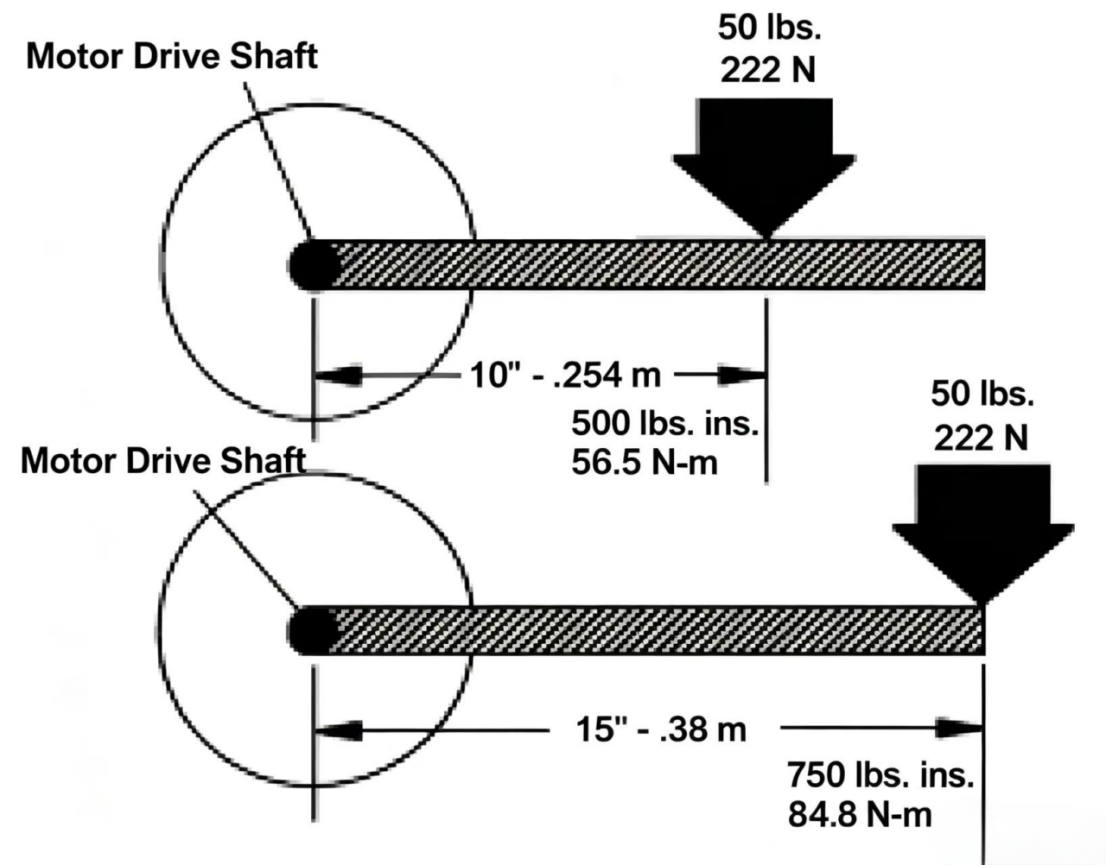
Le couple est une force de rotation ou de torsion. Il s’agit d’une force s’exerçant à une distance par rapport à l’axe central d’un arbre. L’unité de mesure du couple est la livre-pouce (lb.in.) ou le newton-mètre (Nm).
Le couple indique la position de la force par rapport à l’axe central de l’arbre du moteur hydraulique. La formule du couple est la suivante :
Couple = Force × Distance par rapport à l’axe de l’arbre
(lb.in.) = (lb) × (in.) ou (Nm) = (N) × (m)
Exemple tiré de la figure : Une force de 50 lb (222 N) s’exerce sur un manivelle reliée à l’arbre du moteur. La distance entre le centre de l’arbre et le point d’application de la force est de 10 po (0,254 m). Le couple résultant sur l’arbre est donc de 500 po·lb (56,5 N·m). Si la même force de 50 lb (222 N) s’exerce le long d’une manivelle de 15 po (0,38 m), le couple sur l’arbre devient alors de 750 po·lb (84,6 N·m). Plus le point d’application de la force est éloigné du centre de l’arbre, plus le couple est important. Remarquez que le couple ne fait pas intervenir de mouvement.
Une charge connectée à l’arbre d’entraînement du moteur génère un couple, comme décrit ci-dessus. Dans le cas d’un moteur hydraulique, il s’agit d’une résistance — celle-ci doit être vaincue par la pression hydraulique agissant sur l’ensemble rotatif du moteur.
Couple (po·lb) = psi × cylindrée du moteur (po³) ÷ (2 × π)
Couple (N·m) = bar × cylindrée du moteur (cm³) ÷ (20 × π)
La vitesse de rotation de l’arbre d’un moteur hydraulique dépend de la rapidité avec laquelle le fluide est injecté. La formule est la suivante :
Vitesse du moteur (tr/min) = Débit (gal/min) × 231 ÷ cylindrée du moteur (po³/tr)
Vitesse du moteur (tr/min) = Débit volumique (L/min) × 1000 ÷ Cylindrée du moteur (mL/tr)
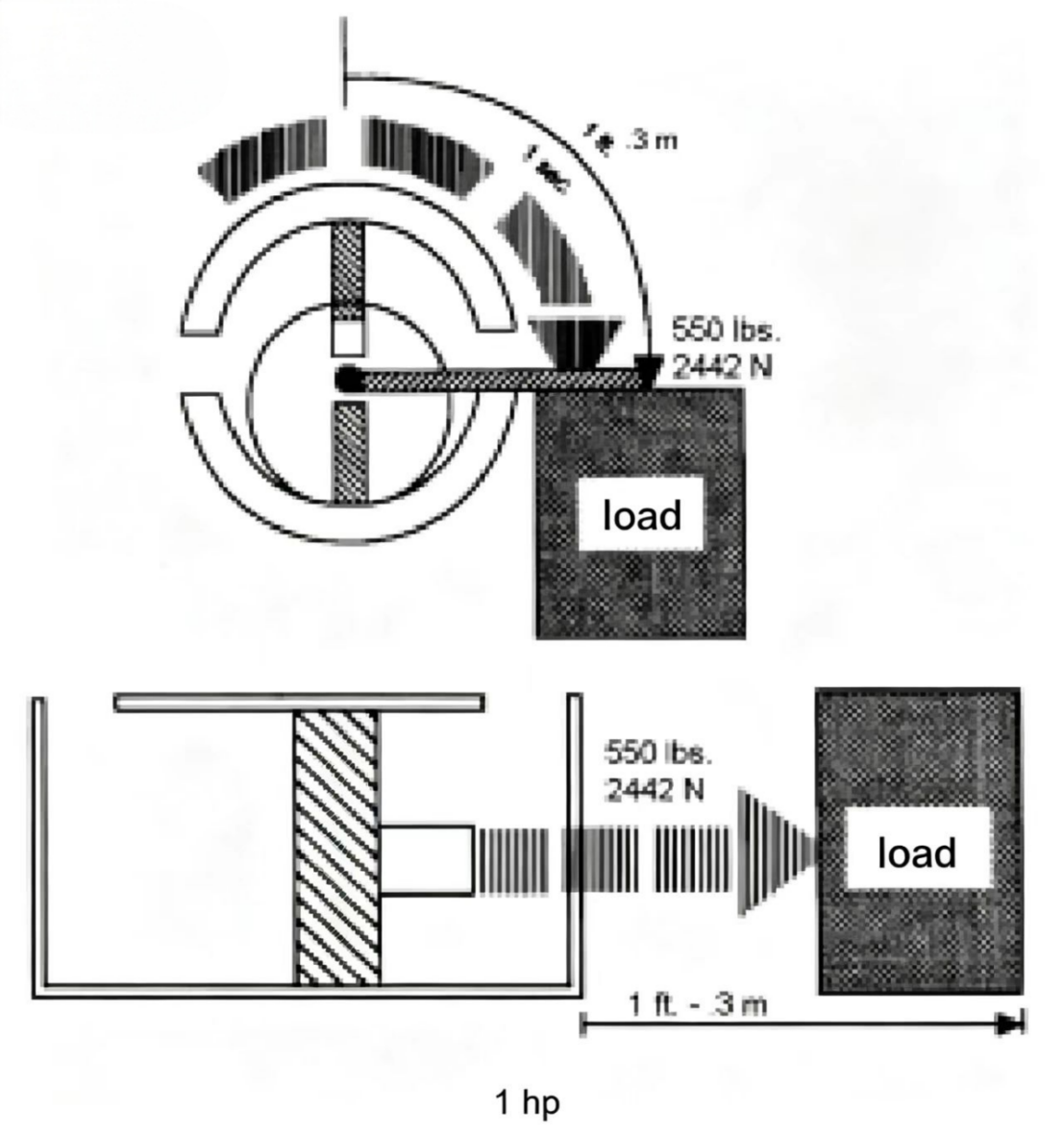
Dans les chapitres précédents, nous avons appris que la puissance est la vitesse à laquelle un travail est effectué, c’est-à-dire : ch = pi.lbf / temps ou W = J / temps.
Nous savons également que le cheval-vapeur (ch) ou le watt (W) est l’unité de puissance. Si un vérin hydraulique ou un moteur hydraulique déplace une charge avec une force mécanique de 550 lbf (2 442 N) sur une distance de 1 pi (0,30 m) en 1 seconde, il a consommé une puissance de 1 ch (746 W). Si le même travail (550 pi.lbf / 746 J) est accompli en une demi-seconde, la vitesse de travail double et la puissance atteint 2 ch (1 490 W).
La puissance mécanique transmise par un vérin ou un moteur à une charge est égale à la puissance hydraulique requise par ce vérin ou ce moteur. Pour un système hydraulique effectuant un travail à un débit de 550 ft·lb par seconde (746 J), sa puissance hydraulique est de 1 ch (746 W). Toutefois, dans la formule de la puissance mécanique, les unités « ft (m) » et « lb (N) » sont remplacées par les grandeurs hydrauliques « psi (bar) » et « gpm (L/min) ». Un facteur de conversion est utilisé dans les calculs de puissance hydraulique afin d’exprimer la relation entre gpm, psi, ft et lb (ou L/min, bar, m et N).
Pour calculer la puissance d’un vérin hydraulique ou celle de l’ensemble du système hydraulique :
ch = gpm × psi × 0,000583
W = ch × 746
W = (5/3) × L/min × bar
Pour calculer la puissance de sortie d’un moteur hydraulique :
ch = tr/min × couple (en·lb) / 63 025
kW = tr/min × couple (N·m) / 9 543
Jusqu'à présent, nous avons abordé les moteurs hydrauliques à sortie rotative et les vérins hydrauliques à sortie linéaire. Nous allons maintenant examiner un autre type d'actionneur produisant une rotation sur angle limité. Ce type est appelé vérin oscillant ou moteur oscillant. Sa structure est compacte, simple et efficace : il délivre un couple élevé et nécessite seulement un faible encombrement, avec une installation aisée.
Les actionneurs oscillants sont utilisés pour le positionnement angulaire des machines-outils, les opérations de pliage, la levée ou la rotation d’objets lourds, le retournement, le positionnement, les dispositifs de serrage en usinage, les commandes nautiques, l’actionnement de vannes, etc.
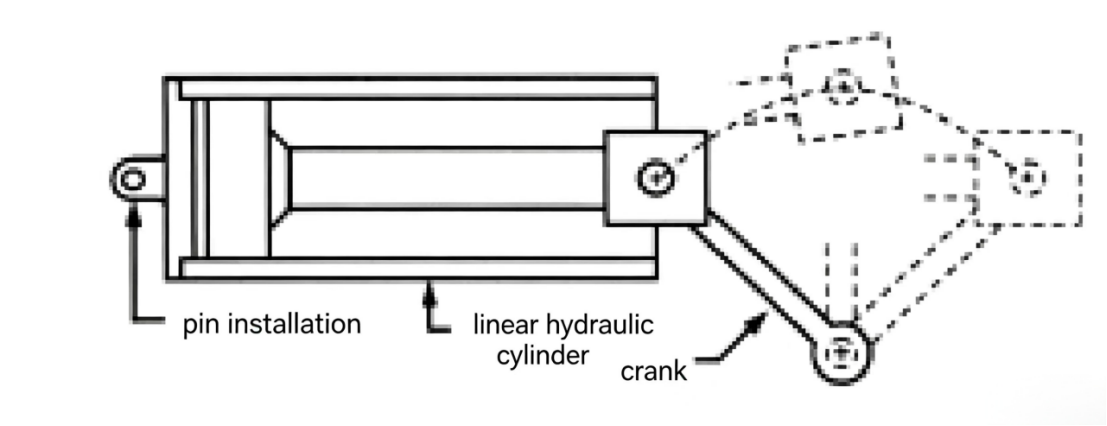
Il existe de nombreux types de vérins oscillants. Le plus simple est un mécanisme oscillant entraîné par un vérin hydraulique linéaire, dont l’extrémité du corps est montée sur une rotule, tandis que la tige de piston est reliée à un manivelle qui entraîne un arbre en rotation. Ce vérin oscillant peut être piloté par une valve directionnelle à quatre voies, avec des fin de course à chaque extrémité de la course.
Comme tous les dispositifs mécaniques, cet actionneur oscillant à base de cylindre linéaire présente certaines caractéristiques fondamentales, notamment le fait qu’il peut être assemblé à partir de composants standard disponibles dans le commerce, offrant ainsi aux concepteurs une grande flexibilité et permettant de maintenir des coûts faibles grâce à la disponibilité aisée des pièces de rechange.
Toutefois, ce type d’actionneur oscillant présente également des inconvénients : la tige du piston n’est pas protégée et entre en contact direct avec l’environnement environnant, d’autant plus que le mécanisme de manivelle n’est généralement pas étanche, ce qui crée des risques pour la sécurité. En outre, l’arbre d’entraînement supporte typiquement de fortes charges latérales, provoquant une défaillance précoce, une usure excessive et un grippage.
Pour ce type spécifique d’actionneur oscillant, le vérin hydraulique doit pouvoir pivoter librement ; il doit donc être raccordé à l’aide de tuyaux flexibles, et, tout au long de la course du vérin, le couple de sortie n’est pas constant.
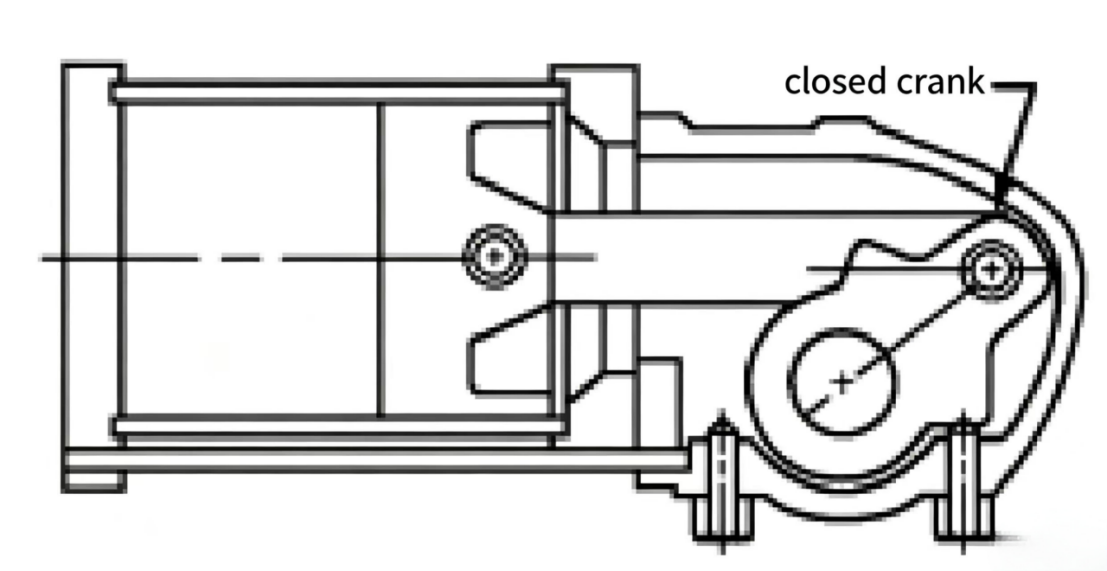
Le vérin oscillant à cylindre intégré est très similaire au mécanisme oscillant à vérin linéaire décrit ci-dessus. Le cylindre intégré est doté d’un capot de protection qui entoure la tige du piston et le manivelle. L’arbre d’entraînement est généralement renforcé par des paliers supplémentaires afin d’éviter des charges latérales importantes. Ce type peut être équipé de distributeurs électromagnétiques, d’interrupteurs de fin de course ou d’interrupteurs de course. La plage de course peut généralement être réglée entre environ 85° et 100°.
Un autre type est le vérin oscillant à rappel par ressort, qui utilise un vérin hydraulique associé à un ressort de rappel pour ramener l’arbre d’entraînement à sa position initiale. Les vérins oscillants à rappel par ressort peuvent délivrer des couples allant jusqu’à 5 000 in.lbs (565 Nm).

Le vérin oscillant le plus courant est de type crémaillère-pignon. Ce type peut maintenir un couple de sortie constant dans les deux sens sur toute la rotation. Dans cette configuration, la pression hydraulique agit sur le piston, poussant la crémaillère reliée au piston, ce qui entraîne la rotation de l’arbre via le pignon. Les vérins standard à crémaillère et pignon offrent des courses de rotation de 90°, 180°, 360° ou même supérieures. Le couple de sortie des vérins à crémaillère et pignon peut atteindre 52 000 000 in.lbs (5 876 000 Nm).

Un moteur oscillant à aube est également disponible. Ce type peut comporter une seule aube ou plusieurs aubes. Un moteur à simple aube peut tourner de 280° ; un moteur à double aube peut tourner de 200°. Le couple de sortie d’un moteur à double aube est le double de celui d’un moteur à simple aube. Ce type de moteur oscillant peut atteindre des couples de sortie allant jusqu’à 500 000 in.lbs (Nm).

Il existe un autre type de moteur oscillant qui génère un couple à l’aide d’un mécanisme de rainure hélicoïdale. Des variations de la longueur et du pas de la rainure permettent de faire varier la course de rotation sur une large plage. Ce type de moteur oscillant comporte un arbre à rainure hélicoïdale équipé d’un manchon de piston intérieurement rainuré monté sur l’arbre — la rotation du manchon de piston est limitée par des tiges de guidage. Lorsque le manchon de piston se déplace à l’intérieur du cylindre, il entraîne la rotation de l’arbre rainuré. Les courses de rotation standard sont de 90°, 180°, 270° et 360°, avec des couples de sortie pouvant atteindre 1 000 000 in.lbs (13 000 Nm).
Les moteurs oscillants à chaîne et pignon utilisent des pistons, des chaînes et des pignons pour entraîner l’arbre. Cet actionneur comporte généralement un grand piston (en tant qu’organe d’entraînement) pour tirer la chaîne, ainsi qu’un petit piston destiné à empêcher les fuites d’huile par le trajet de retour de la chaîne. Les couples de sortie peuvent atteindre environ 23 000 in.lbs (2 599 Nm), et la rotation de l’arbre d’entraînement peut atteindre cinq tours complets, soit 1 800°.
Pour sélectionner le vérin oscillant le plus adapté à une application spécifique, il faut tenir compte du couple, de la vitesse et du mode de fonctionnement. Nous décrirons la sélection pratique d’un moteur oscillant dans un autre chapitre et aborderons plus en détail la détermination du type à simple ou double effet, l’opportunité d’utiliser un positionnement en boucle fermée, la nécessité ou non d’amortissement, etc. La fréquence de fonctionnement ou la période de cycle sera également examinée.
La vitesse de l'actionneur dépend du débit (gpm ou L/min)
La vitesse linéaire de la tige de piston d’un vérin hydraulique dépend de la vitesse à laquelle la pompe injecte le fluide dans la chambre de piston du vérin (gpm ou L/min). La vitesse de rotation de l’arbre moteur d’un moteur hydraulique dépend du débit (gpm ou L/min) injecté dans le moteur hydraulique.
La force de sortie de l'actionneur dépend de la pression (psi ou bar)
La force de sortie d’un vérin est exprimée en psi (bar) — la force de sortie sur l’arbre d’entraînement d’un moteur est déterminée par la pression agissant sur la surface exposée de l’ensemble rotatif du moteur. La puissance produite par un actionneur est fonction de la vitesse de l’actionneur multipliée par sa force de sortie.
Pour les vérins, la force de sortie est exprimée en psi et la vitesse de la tige de piston en gpm. La constante 0,000583 décrit la relation entre psi, gpm et puissance. Pour les moteurs, la force de sortie est exprimée en couple et la vitesse de fonctionnement du moteur en tr/min. La constante 63 025 décrit la relation entre tr/min, couple et puissance.

Bienvenue chez HOVOO, une usine de joints chinoise. Production de joints en PU, caoutchouc et PTFE. Les joints incluent les joints toriques, joints pistons, joints tiges, anneaux gris et joints gaz.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}