33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]
33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]

Silinder hidrolik mengubah energi hidrolik menjadi gerak mekanis lurus atau linear. Ketika dihubungkan ke beban yang dapat bergerak, silinder ini melakukan kerja.
Seperti diperkenalkan pada bab-bab sebelumnya, silinder hidrolik terutama terdiri dari tabung (barrel), dua tutup ujung tertutup, piston, batang piston, serta port masuk dan keluar. Masing-masing ujung memiliki satu port — satu untuk oli masuk dan satu lagi untuk oli keluar.
gambar 6-1 Silinder hidrolik standar dua-arah. Oli memasuki silinder melalui port kiri, sehingga batang penggerak menjulur; oli yang mengalir melalui port kanan akan menarik kembali batang tersebut.
Sepanjang langkah silinder, energi hidrolik bekerja pada piston yang bergerak. Tekanan yang dihasilkan oleh energi hidrolik tersebut tidak akan melebihi hambatan yang dihasilkan oleh beban. Untuk silinder dengan dimensi yang diketahui, kita perlu mengetahui tekanan kerja berapa yang menghasilkan gaya keluaran tertentu. Nilai ini dapat ditentukan (dengan mengabaikan gesekan) menggunakan rumus berikut:
Tekanan = Gaya ÷ Luas
Saat menggunakan rumus ini, baik luas penampang dan tekanan diketahui untuk mencari gaya keluaran, maupun luas penampang dan gaya keluaran yang diketahui untuk mencari tekanan. Dalam praktiknya, kita biasanya mengetahui diameter lubang silinder (bore diameter) dan perlu menghitung luas penampang piston—namun menghitung luas lingkaran sama sederhananya dengan menghitung luas persegi.
Luas lingkaran setara dengan sekitar 78,54% dari luas persegi yang panjang sisinya sama dengan diameter lingkaran. Lebih tepatnya:
Luas lingkaran = Diameter^2 × 0,7854
Rumus lain yang sering digunakan:
Luas lingkaran = π × D^2 ÷ 4

Gambar 6-2 Luas lingkaran = D² × 0,7854. Rumus sederhana ini digunakan secara terus-menerus dalam perhitungan silinder hidrolik.
Jarak tempuh di mana energi hidrolik bekerja menentukan besarnya usaha yang dilakukan — jarak ini disebut langkah silinder. Seperti disebutkan sebelumnya, penggunaan tekanan hidrolik untuk memperbesar gaya tampaknya tidak memerlukan biaya apa pun. Dalam beberapa situasi tertentu — ketika sistem berada dalam keadaan statis — sebuah gaya kecil dapat menghasilkan gaya yang sangat besar tanpa pengorbanan yang tampak. Namun, jika gaya yang diperbesar ini juga menyebabkan pergerakan, maka ada sesuatu yang dikorbankan: jarak.
Setiap silinder hidrolik memiliki volume (perpindahan) yang sama dengan langkahnya (inci) dikalikan luas piston-nya (inci²), menghasilkan volume dalam satuan inci³ (cm³).
Volume silinder = Luas piston × Langkah
(inci³) = (inci²) × (inci) atau (cm³) = (cm²) × (cm)
Contoh: Piston atas harus bergerak sejauh 2 inci (5,08 cm) agar piston silinder bawah bergerak sejauh 1 inci (2,54 cm). Kedua piston melakukan usaha yang sama. Piston atas memindahkan 20 inci³ (327,8 cm³) fluida — dan piston silinder bawah juga mengalami perpindahan sebanyak 20 inci³ (327,8 cm³) fluida tersebut.
Kecepatan batang piston silinder hidrolik bergantung pada kecepatan pengisian fluida ke ruang di belakang piston. Rumus kecepatan batang piston:
Kecepatan batang (inci/menit) = Laju aliran (gpm) × 231 ÷ Luas permukaan piston (inci²)
Kecepatan batang (m/detik) = Laju aliran (Lpm) × 0,1667 ÷ Luas permukaan piston (cm²)

Motor hidrolik adalah aktuator yang mengubah energi hidrolik menjadi energi mekanis berputar. Energi berputar ini diteruskan ke beban melalui poros penggerak.
Semua motor hidrolik pada dasarnya terdiri dari rumah (housing) dengan port masuk dan keluar, serta susunan berputar yang terhubung ke poros penggerak.
Contoh yang ditunjukkan adalah motor hidrolik tipe baling-baling. Perakitan berputar terdiri atas rotor dan baling-baling yang dapat bergerak bebas masuk dan keluar dari alur-alur rotor. Perakitan berputar dipasang secara eksentris di dalam rumah motor; poros penggerak terhubung ke beban. Ketika oli bertekanan memasuki ruang masuk, energi hidrolik bekerja pada permukaan baling-baling yang terpapar di ruang masuk. Karena luas permukaan baling-baling bagian atas yang terpapar oli bertekanan lebih besar, maka gaya yang bekerja pada rotor menjadi tidak seimbang—rotor berputar.
Ketika oli mencapai ruang keluar dengan volume yang semakin berkurang, oli tersebut dikeluarkan.
Catatan: Sebelum motor tipe ini dapat beroperasi secara normal, baling-baling harus diperpanjang dan harus membentuk segel yang andal dengan rumah motor. Berbeda dengan pompa hidrolik, baling-baling tidak dapat didorong keluar oleh gaya sentrifugal—metode pemanjangan baling-baling motor akan dibahas pada bab selanjutnya.
Gambar 6-6 Prinsip kerja motor baling-baling. Minyak bertekanan bekerja pada permukaan baling-baling. Karena luas permukaan baling-baling bagian atas yang terkena tekanan lebih besar daripada luas permukaan baling-baling bagian bawah, maka gaya resultan memutar rotor.
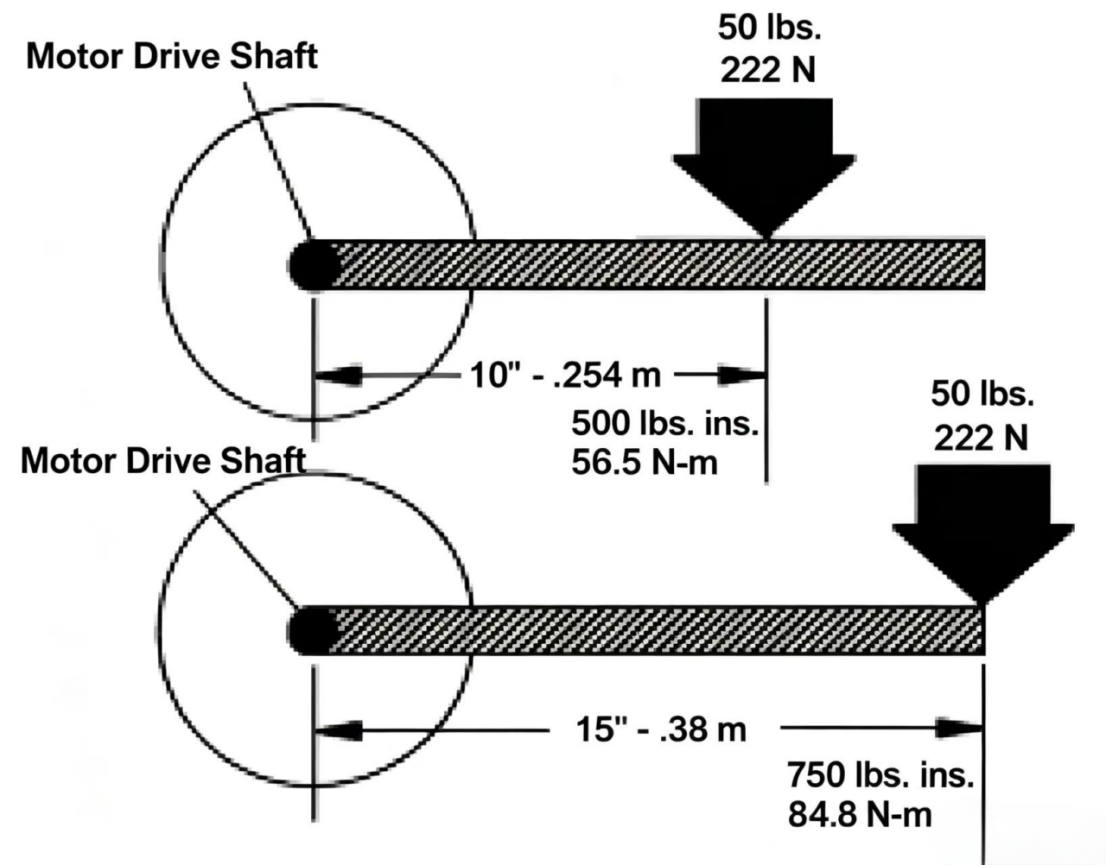
Torsi adalah gaya rotasi atau puntir. Torsi merupakan gaya yang bekerja pada jarak tertentu dari garis tengah poros. Satuan torsi adalah lb.in. (atau Nm).
Rumus torsi memberi tahu kita posisi gaya relatif terhadap garis tengah poros motor hidrolik. Rumus torsi adalah:
Torsi = Gaya × Jarak dari garis tengah poros
(lb.in.) = (lb) × (in.) atau (Nm) = (N) × (m)
Contoh dari gambar: Gaya sebesar 50 lbs (222 N) bekerja pada engkol yang terhubung ke poros motor. Jarak antara pusat poros dan titik kerja gaya adalah 10 inci (0,254 m). Torsi yang dihasilkan pada poros adalah 500 inci-lbs (56,5 Nm). Jika gaya yang sama sebesar 50 lbs (222 N) bekerja sepanjang lengan engkol sepanjang 15 inci (0,38 m), maka torsi pada poros menjadi 750 inci-lbs (84,6 Nm). Semakin jauh titik kerja gaya dari pusat poros, semakin besar torsi yang dihasilkan. Perlu diperhatikan bahwa torsi tidak melibatkan perpindahan atau gerak.
Beban yang terhubung ke poros penggerak motor menghasilkan torsi seperti dijelaskan di atas. Pada motor hidrolik, beban ini berupa hambatan — yang harus diatasi oleh tekanan hidrolik yang bekerja pada assembli rotasi motor.
Torsi (inci-lbs) = psi × perpindahan motor (inci³) ÷ (2 × π)
Torsi (Nm) = bar × perpindahan motor (cm³) ÷ (20 × π)
Kecepatan poros motor hidrolik ditentukan oleh laju injeksi fluida. Rumusnya adalah:
Kecepatan motor (rpm) = laju aliran (gpm) × 231 ÷ perpindahan motor (inci³/putaran)
Kecepatan motor (rpm) = Laju aliran (Lpm) × 1000 ÷ Perpindahan motor (ml/rev)
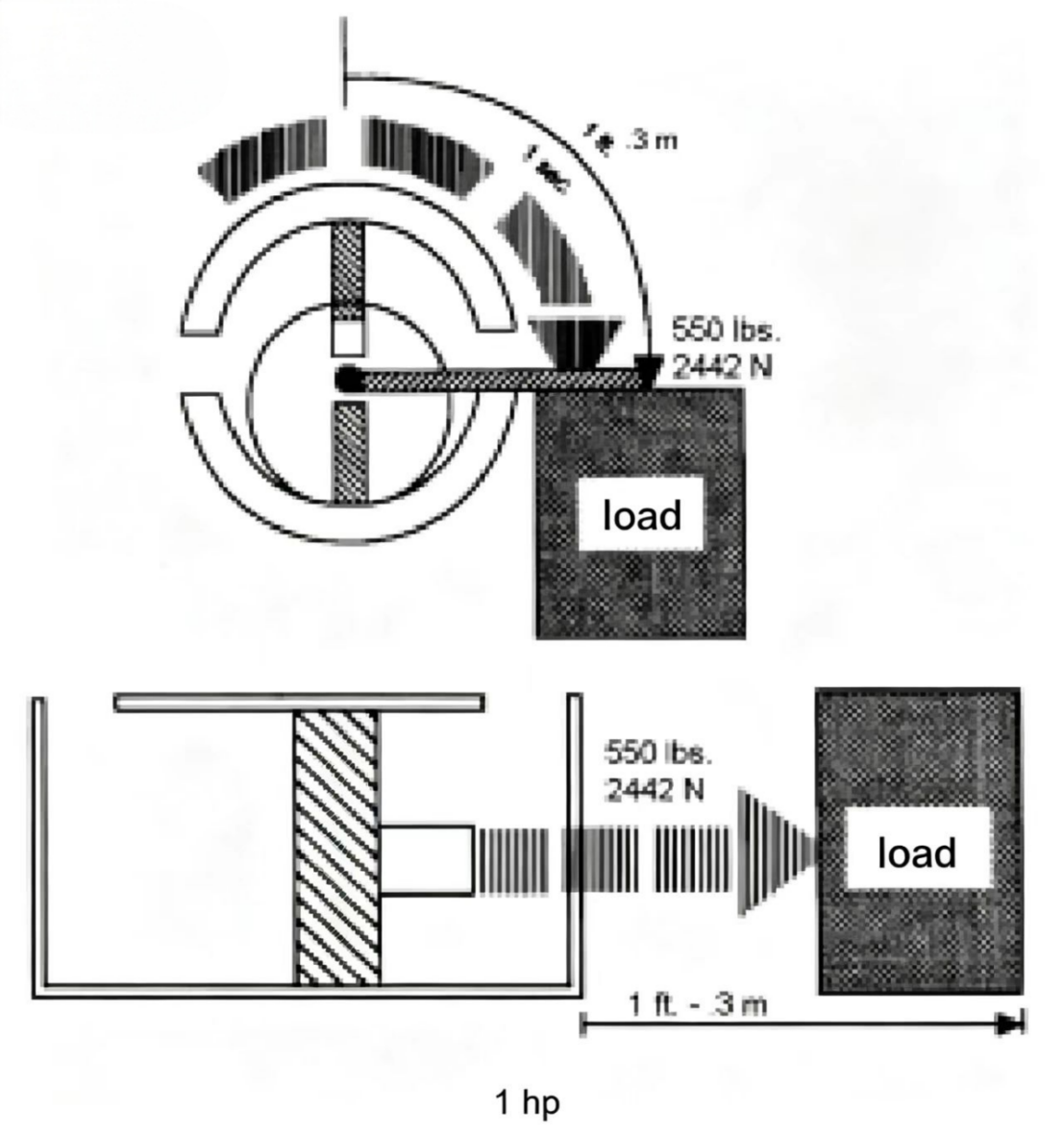
Pada bab-bab sebelumnya, kita mempelajari bahwa daya adalah laju melakukan usaha, yaitu hp = ft.lbs/waktu, atau W = J/waktu.
Kita juga mengetahui bahwa tenaga kuda (hp) atau watt (W) adalah satuan daya. Jika sebuah silinder hidrolik atau motor hidrolik menggerakkan beban dengan gaya mekanis sebesar 550 lbs (2.442 N) dan memindahkannya sejauh 1 ft (0,30 m) dalam waktu 1 detik, maka daya yang digunakan adalah 1 hp (746 W). Jika usaha yang sama (550 ft.lbs / 746 J) dilakukan dalam waktu setengah detik, kecepatan kerja menjadi dua kali lipat dan dayanya menjadi 2 hp (1.490 W).
Daya mekanis yang ditransmisikan oleh silinder atau motor ke beban sama dengan daya hidrolik yang dibutuhkan oleh silinder atau motor tersebut. Untuk suatu sistem hidrolik yang melakukan kerja pada laju 550 ft.lbs per detik (746 J), daya hidroliknya adalah 1 hp (746 W). Namun, dalam rumus daya mekanis, satuan "ft (m)" dan "lbs (N)" digantikan oleh istilah hidrolik "psi (bar)" dan "gpm (Lpm)". Suatu faktor konversi digunakan dalam perhitungan daya hidrolik untuk menyatakan hubungan antara gpm, psi, ft, dan lbs (atau Lpm, bar, m, dan N).
Untuk menghitung daya silinder hidrolik atau seluruh sistem hidrolik:
hp = gpm × psi × 0,000583
W = hp × 746
W = (5/3) × Lpm × bar
Untuk menghitung daya keluaran motor hidrolik:
hp = rpm × Torsi (in.lbs) / 63.025
kW = rpm × Torsi (Nm) / 9.543
Sejauh ini kita telah membahas motor hidrolik dengan output putar dan silinder hidrolik dengan output linear. Sekarang kita akan membahas jenis aktuator lain yang menghasilkan rotasi dalam sudut terbatas. Jenis ini disebut silinder berosilasi atau motor berosilasi. Strukturnya kompak, sederhana, dan efisien—menghasilkan torsi tinggi serta hanya memerlukan ruang pemasangan yang kecil, dengan pemasangan yang mudah.
Aktuator berosilasi digunakan untuk pengindeksan alat mesin, operasi pembengkokan, pengangkatan atau pemutaran benda berat, pembalikan, penentuan posisi, perlengkapan permesinan, kontrol maritim, pengoperasian katup, dan sebagainya.
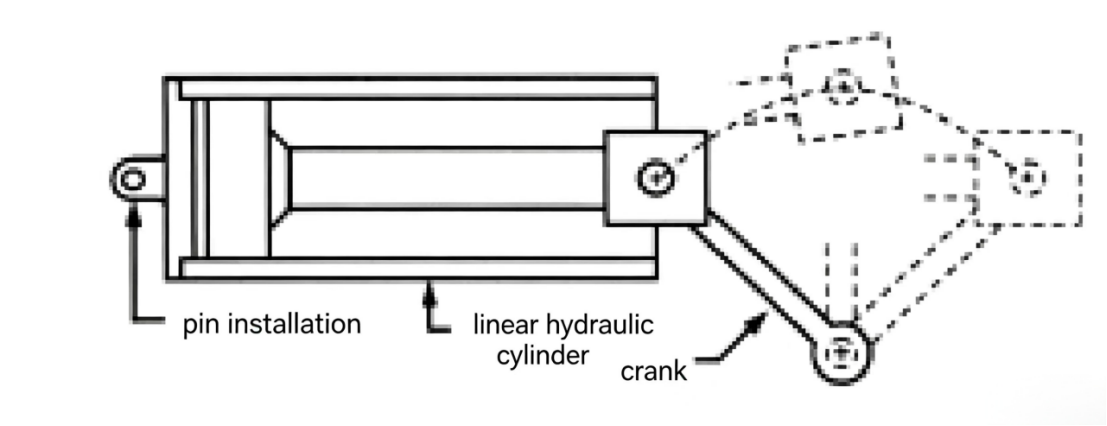
Terdapat banyak jenis silinder berosilasi. Yang paling sederhana adalah mekanisme berosilasi yang digerakkan oleh silinder hidrolik linear, di mana ujung badan silinder dipasang dengan pin, dan batang piston dihubungkan ke engkol yang menggerakkan poros untuk berputar. Silinder berosilasi ini dapat dikendalikan menggunakan katup arah 4-arah, dengan saklar batas di masing-masing ujung langkahnya.
Seperti semua perangkat mekanis, aktuator osilasi berbasis silinder linear ini memiliki beberapa karakteristik dasar, termasuk kemampuan dirakit dari komponen standar yang tersedia di pasaran, sehingga memberikan fleksibilitas besar bagi para perancang serta menjaga biaya tetap rendah berkat suku cadang yang mudah diperoleh.
Namun, jenis aktuator osilasi ini juga memiliki kekurangan: batang piston tidak terlindungi dan bersentuhan langsung dengan lingkungan sekitarnya, terutama karena mekanisme engkol umumnya tidak tersegel, sehingga menimbulkan bahaya keselamatan. Selain itu, poros penggerak biasanya menanggung beban lateral besar, yang menyebabkan kegagalan dini, keausan berlebih, dan macet.
Untuk jenis aktuator osilasi khusus ini, silinder hidrolik harus bebas berayun, sehingga harus menggunakan sambungan selang fleksibel, dan sepanjang langkah silinder, torsi keluaran tidak konstan.
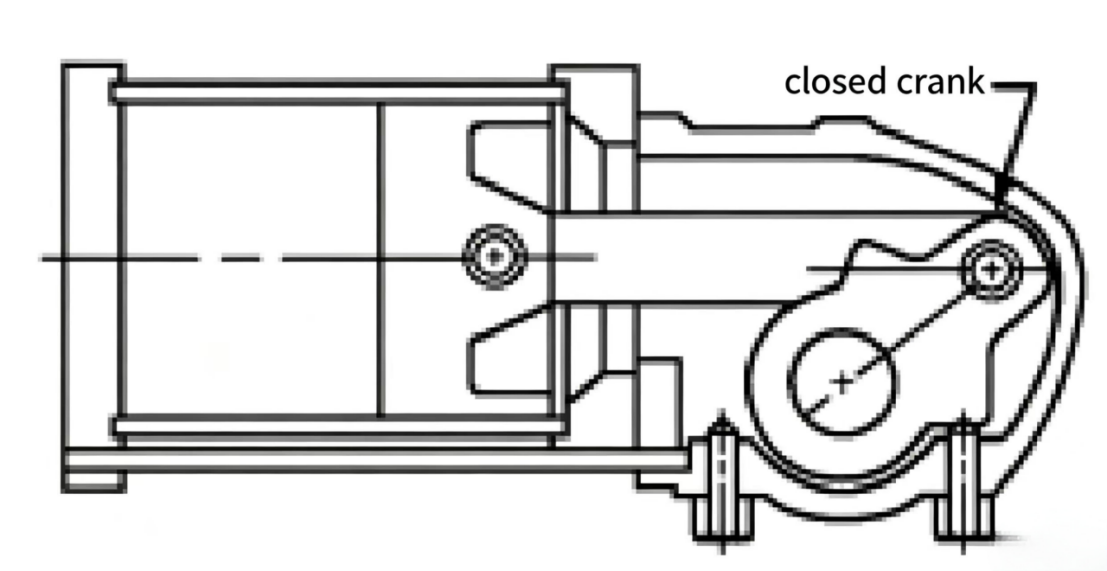
Silinder berosilasi tertutup yang dilampirkan sangat mirip dengan mekanisme berosilasi berbasis silinder linear di atas. Silinder tertutup memiliki penutup pelindung yang membungkus batang piston dan engkol. Poros penggerak biasanya memiliki dukungan bantalan tambahan untuk mencegah beban lateral yang berat. Jenis ini dapat dipasangi katup solenoida, saklar batas, atau saklar langkah. Kisaran langkah biasanya dapat disesuaikan antara sekitar 85° hingga 100°.
Jenis lainnya adalah silinder berosilasi dengan pegas pengembali, yang menggunakan silinder hidrolik dengan pegas pengembali untuk mengembalikan poros penggerak ke posisi semula. Silinder berosilasi dengan pegas pengembali mampu menghasilkan torsi hingga 5.000 inci-pound (565 Nm).

Silinder berosilasi yang paling umum adalah tipe roda gigi-rak. Jenis ini mampu mempertahankan torsi keluaran konstan ke arah mana pun sepanjang putaran penuh. Dalam konfigurasi ini, tekanan hidrolik bekerja pada piston, mendorong rak yang terhubung ke piston, sehingga menggerakkan roda gigi pinion untuk memutar poros. Silinder roda gigi-rak standar memiliki langkah rotasi sebesar 90°, 180°, 360°, atau bahkan lebih besar. Torsi keluaran silinder roda gigi-rak dapat mencapai 52.000.000 inci-pound (5.876.000 Nm).

Tersedia pula motor berosilasi jenis pelatuk. Jenis ini dapat berupa pelatuk tunggal atau pelatuk ganda. Motor pelatuk tunggal mampu berotasi hingga 280°; sedangkan motor pelatuk ganda mampu berotasi hingga 200°. Torsi keluaran pelatuk ganda dua kali lipat dibandingkan pelatuk tunggal. Jenis motor berosilasi ini mampu mencapai torsi keluaran hingga 500.000 inci-pound (Nm).

Ada jenis motor osilasi lain yang menghasilkan torsi menggunakan mekanisme alur heliks. Perubahan panjang dan jarak antar ulir (pitch) alur memungkinkan rentang gerak rotasi bervariasi dalam kisaran yang luas. Jenis motor osilasi ini memiliki satu poros alur heliks dengan selubung piston berulir internal yang terpasang pada poros tersebut—rotasi selubung piston dibatasi oleh batang penuntun. Ketika selubung piston bergerak di dalam silinder, ia mendorong poros berulir untuk berotasi. Rentang gerak rotasi standar adalah 90°, 180°, 270°, dan 360°, dengan torsi keluaran hingga 1.000.000 in.lbs (13.000 Nm).
Motor osilasi rantai-dan-gir menggunakan piston, rantai, dan gir untuk menggerakkan poros. Aktuator jenis ini umumnya memiliki satu piston besar (sebagai perangkat penggerak) untuk menarik rantai, serta satu piston kecil untuk mencegah kebocoran oli melalui jalur rantai kembali. Torsi keluaran dapat mencapai sekitar 23.000 in.lbs (2.599 Nm), dan rotasi poros penggerak dapat mencapai lima putaran penuh atau 1.800°.
Untuk memilih silinder osilasi yang paling sesuai untuk aplikasi tertentu, diperlukan penyesuaian torsi, kecepatan, dan metode pengoperasian. Pemilihan motor osilasi aktual akan dijelaskan dalam bab lain, serta pembahasan lebih lanjut mengenai cara menentukan apakah menggunakan tipe kerja tunggal atau kerja ganda, apakah perlu posisi loop tertutup, apakah peredaman diperlukan, dan sebagainya. Frekuensi pengoperasian atau periode siklus juga akan dianalisis.
Kecepatan aktuator merupakan fungsi dari laju aliran (gpm atau L/menit)
Kecepatan linear batang piston silinder hidrolik bergantung pada kecepatan pompa dalam menyuntikkan fluida ke ruang piston silinder (gpm atau L/menit). Kecepatan rotasi poros penggerak motor hidrolik bergantung pada laju aliran (gpm atau L/menit) yang disuntikkan ke motor hidrolik.
Gaya keluaran aktuator merupakan fungsi dari tekanan (psi atau bar)
Gaya keluaran suatu silinder dinyatakan dalam psi (bar) — gaya keluaran pada poros penggerak motor ditentukan oleh tekanan yang bekerja pada luas permukaan terbuka dari perakitan berputar motor. Daya yang dihasilkan oleh aktuator merupakan fungsi dari kecepatan aktuator dikalikan dengan gaya keluaran aktuator.
Untuk silinder, gaya keluaran dinyatakan dalam psi dan kecepatan batang piston dalam gpm. Konstanta 0,000583 menggambarkan hubungan antara psi, gpm, dan daya. Untuk motor, gaya keluaran dinyatakan dalam torsi, dan kecepatan operasi motor dalam rpm. Konstanta 63.025 menggambarkan hubungan antara rpm, torsi, dan daya.

Selamat datang di HOVOO, pabrik segel Cina. Produksi segel PU, Karet dan PTFE. Segel tersebut mencakup O-ring, segel piston, segel batang, Gray ring dan segel gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}