33-99 רח' מופו, מחוז גולו, ננ징, סין [email protected] | [email protected]
33-99 רח' מופו, מחוז גולו, ננ징, סין [email protected] | [email protected]

צילינדר הידראולי ממיר אנרגיה הידראולית לתנועה מכנית ישרה או ליניארית. כאשר מחוברים לעומס נייד, הם מבצעים עבודה.
כפי שהוצג בפרקים הקודמים, צילינדר הידראולי מורכב בעיקר מגוף הצילינדר, שני כיסויי קצה סגורים, פיסטון, מוט פיסטון ופתחי כניסה ויציאה. בכל קצה יש פתח אחד — אחד לזרימת השמן פנימה והשני לזרימת השמן החוצה.
תמונה 6-1: צילינדר הידראולי דו-פעולי סטנדרטי. השמן נכנס דרך הפתח השמאלי, מה שגורם למוט להתארך; שמן הזורם דרך הפתח הימני גורם לחזרתו.
במהלך כל תנועת המטושק בתוך הגליל, פועלת אנרגיה הידראולית על המטושק הנע. הלחץ שנוצר על ידי אנרגיה הידראולית זו לא יעלה על התנגדות המטען. עבור גליל עם מידות ידועות, עלינו לדעת איזה לחץ עבודה מייצר כוח יציאה ספציפי. ניתן לקבוע זאת (בהתעלמות מהחיכוך) בעזרת הנוסחה:
לחץ = כוח ÷ שטח
בעת שימוש בנוסחה זו, או שנותנים את השטח והלחץ כדי למצוא את כוח היציאה, או שנותנים את השטח וכוח היציאה כדי למצוא את הלחץ. בפועל, בדרך כלל אנו יודעים את קוטר הגליל (bore diameter) וצריכים לחשב את שטח המטושק — אך חישוב שטח עיגול פשוט באותה מידה כמו חישוב שטח ריבוע.
שטח העיגול שווה בקירוב ל-78.54% משטח הריבוע שאורך צלעו שווה לקוטר העיגול. באופן מדויק יותר:
שטח עיגול = קוטר² × 0.7854
נוסחה נוספת הנפוצה לשימוש:
שטח עיגול = π × D² ÷ 4
איור 6-2 שטח העיגול = D² × 0.7854. נוסחה פשוטה זו משמשת באופן קבוע בחישובים של צילינדרים הידראוליים.
המרחק שבו פועלת האנרגיה ההידראולית קובע את כמות העבודה שנעשית — מרחק זה הוא תנועת המוט של הצילינדר. כפי שצוין קודם לכן, השימוש בלחץ הידראולי להגביר כוח נראה כאילו אינו עולה דבר. במקרים מסוימים ספציפיים — כאשר המערכת נמצאת במצב סטטי — כוח קטן יכול לייצר כוח גדול מאוד ללא ויתור מורגש. אך אם הכוח המוגבר הזה גורם גם לתנועה, יש ויתור על משהו: המרחק.
לכל צילינדר הידראולי יש נפח (העתק) השווה למסלול התנועה שלו (אינץ') כפול שטח הפיסטון שלו (אינץ'²), מה שנותן נפח באינץ'³ (ס"מ³).
נפח הצילינדר = שטח הפיסטון × מסלול התנועה
(אינץ'³) = (אינץ'²) × (אינץ') או (ס"מ³) = (ס"מ²) × (ס"מ)
דוגמה: הפיסטון העליון חייב לנוע 2 אינץ' (5.08 ס"מ) כדי לגרום לפיסטון הגליל התחתון לנוע 1 אינץ' (2.54 ס"מ). שני הפיסטונים מבצעים את אותה העבודה. הפיסטון העליון מזיז נפח של 20 אינץ' מעוקב (327.8 סמ"ק) של נוזל — והפיסטון הגליל התחתון מוזז על ידי אותו נפח של 20 אינץ' מעוקב (327.8 סמ"ק) של נוזל.
מהירות מוט הפיסטון של גליל הידראולי תלויה במהירות שבה נוזל ממלא את המרחב מאחרי הפיסטון. נוסחאות לחישוב מהירות מוט הפיסטון:
מהירות המוט (אינץ'/דקה) = שיעור הזרימה (גאלון לדקה) × 231 ÷ שטח הפיסטון (אינץ' ריבועי)
מהירות המוט (מטר/שניה) = שיעור הזרימה (ליטר לדקה) × 0.1667 ÷ שטח הפיסטון (סמ"ר)
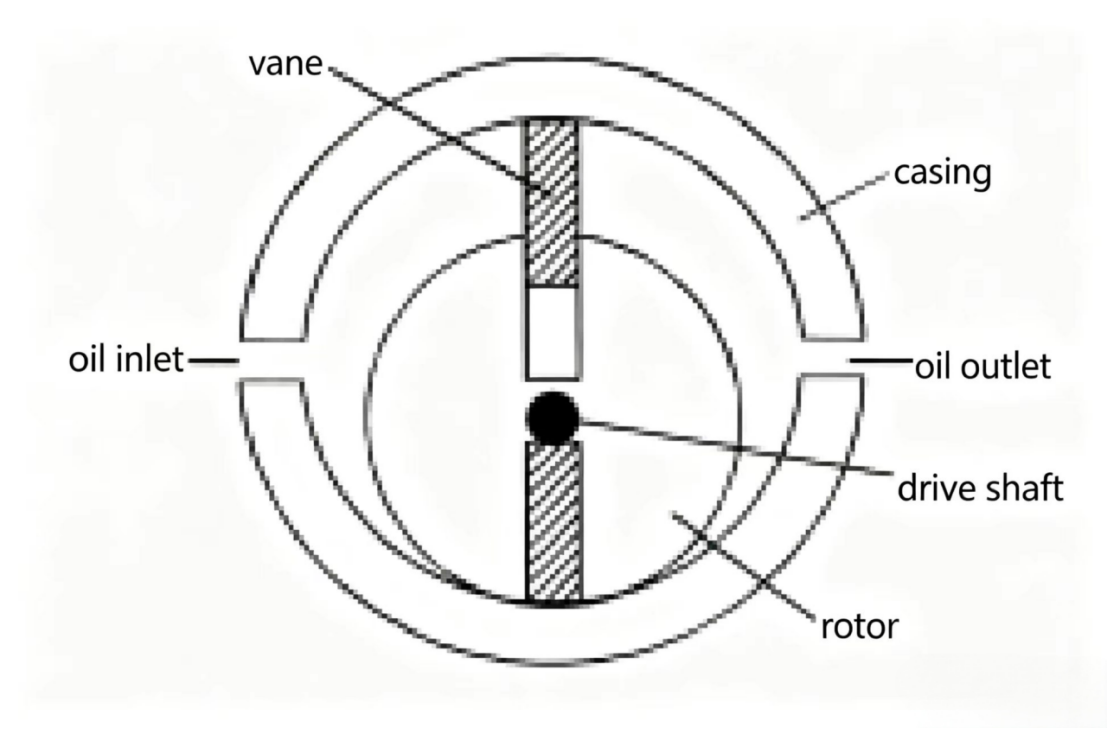
מנוע הידראולי הוא מפעיל הממיר אנרגיה הידראולית לאנרגיה מכנית סיבובית. האנרגיה הסיבובית הזו מועברת למשימה דרך ציר הפעלה.
כל המנועים ההידראוליים מורכבים בעיקרו מהousing עם פתחי קליטה ופליטה, ומערכת מסתובבת המחוברת לציר הפעלה.
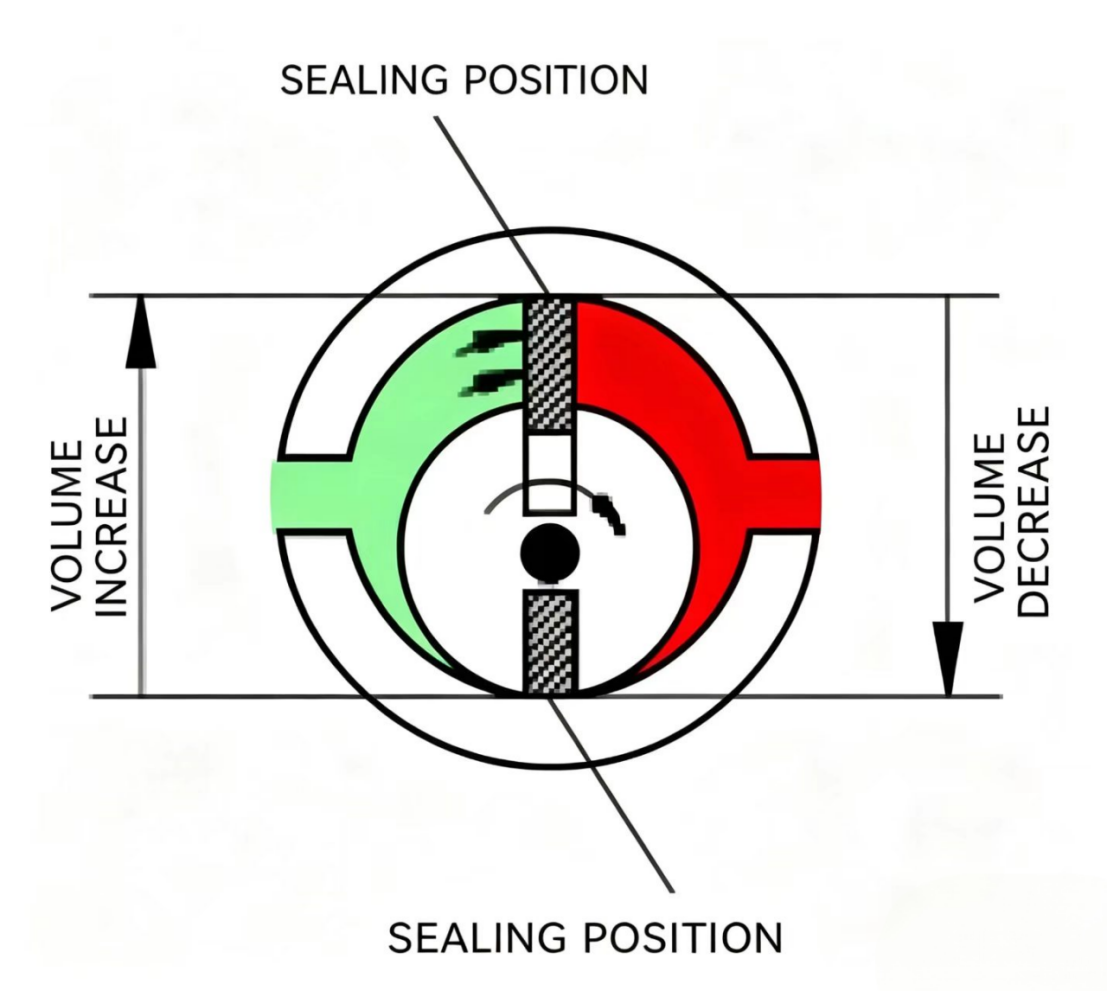
הדוגמה המוצגת היא מנוע הידראולי מסוג טורבינה. הסידור הסובב כולל רוטור ותלמיים שיכולים לגלוש חופשית פנימה ובחוצה מהפינות ברוטור. הסידור הסובב מותקן אקסצנטרית בתוך הגוף; ציר הפעולה מחובר לעומס. כאשר שמן תחת לחץ נכנס לתא הקליטה, האנרגיה ההידראולית פועלת על הפנים החשופים של התלמיים בתא הקליטה. מאחר ששטח הפנים העליון של התלמיים הנחשף לשמן תחת לחץ גדול יותר, הכוח הפועל על הרוטור אינו מאוזן — והרוטור מסתובב.
כשالשמן מגיע לחדר היציאה שנפחיו קטן בהדרגה, הוא נפלט החוצה.
הערה: לפני שהמנוע מסוג זה יכול לפעול כראוי, התלמיים חייבים להיות פרוסים ולהכיל חתימה אמינה עם הגוף. בניגוד למשאבה הידראולית, התלמיים אינם יכולים להתרחק החוצה בכוח צנטריפוגלי — שיטת פריסת התלמיים במנוע תוסבר בפרק מאוחר יותר.
איור 6-6: פעולת מנוע תרנגולות. שמן בלחץ פועל על פאות התרנגולות. מכיוון ששטח התרנגולת העליונה המופ exposd ללחץ גדול משטח התרנגולת התחתונה, הכוח השקול מסובב את הרוטור.
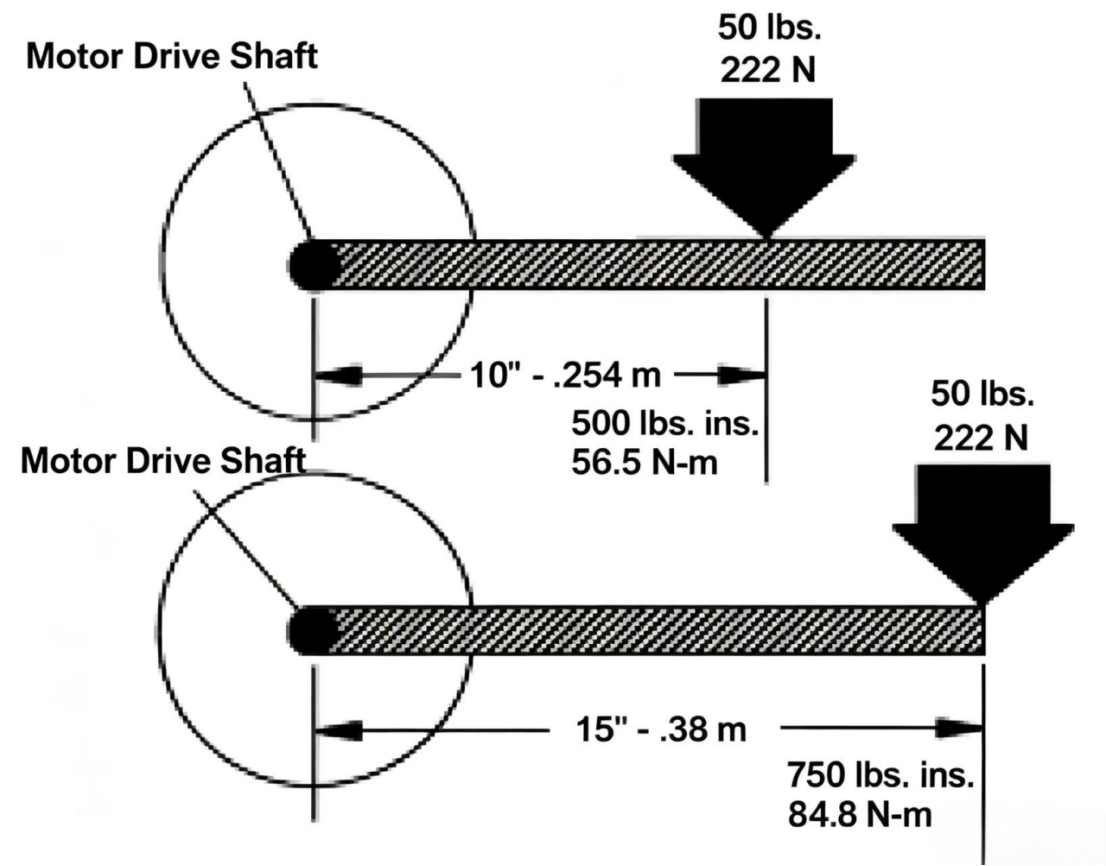
מומנט הוא כוח סיבובי או מתפתל. מומנט הוא כוח הפועלים במרחק מסוים מציר הציר. יחידת המומנט היא ליברה-אינץ' (או ניוטון-מטר).
המומנט מציין לנו את המיקום של הכוח ביחס לציר המנוע ההידראולי. נוסחת המומנט היא:
מומנט = כוח × מרחק מציר הציר
(ליברה-אינץ') = (ליברות) × (אינץ') או (ניוטון-מטר) = (ניוטון) × (מטר)
דוגמה מהשלם: כוח של 222 נ"ט פועל על מופע מחובר אל עמוד המנוע. המרחק בין מרכז העמוד לכוח הוא 10 אינץ'. (0.254 מ'). עיקול הנפלט על עץ הוא 500 פאונד (56.5 נ"מ). אם אותו 50 פאונד (222 נ"ט) פועל לאורך 15 אינץ'. (0.38 מ) זרוע מנדל, עיקול על העמוד הוא 750 in.lbs (84.6 Nm). ככל שהכוח פועל רחוק ממרכז העץ, כך עיקול המנוע גדול יותר. שים לב שנקודת המנוע אינה כרוכה בשום תנועה.
עומס מחובר אל עמוד ההנעה של המנוע מייצר עיקול כפי שתיארו לעיל. עבור המנוע ההידרולי, זו התנגדות היא חייבת להתגבר על ידי לחץ הידרולי הפועל על הרכב המסתובב של המנוע.
עיקול (ב.לב) = פסי כפח המנוע (ב^3) / (2 x פאי)
עיקול (Nm) = בר × המנוע (סמ^3) / (20 x pi)
מהירות עץ המנוע ההידרולי נקבעת על ידי כמה מהר נוזל מוזרק. הנוסחה היא:
מהירות המנוע (rpm) = קצב זרימה (gpm) × 231 / הזרימה של המנוע (ב ^ 3 / rev)
מהירות המנוע (סיבובים לדקה) = שיעור הזרימה (ליטרים לדקה) × 1000 ÷ נפח המנוע (מ״ל לסיבוב)
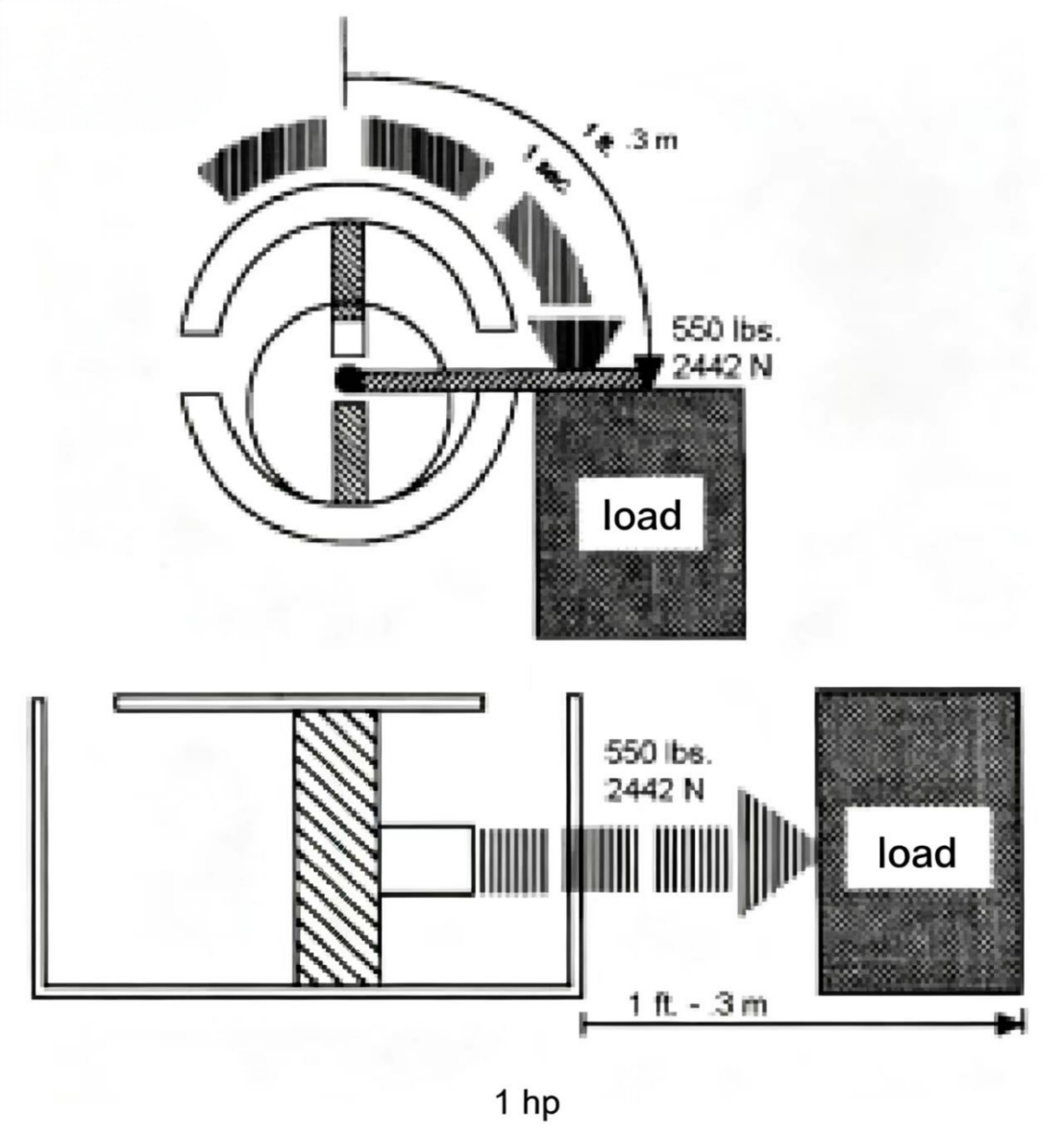
בפרקים הקודמים למדנו שמערכת ההספק היא קצב ביצוע העבודה, כלומר: כוח סוס (hp) = רגל-פאונד/זמן, או וואט (W) = ג'ול/זמן.
אנו גם יודעים שכוח סוס (hp) או וואט (W) הם יחידות של הספק. אם צילינדר הידראולי או מנוע הידראולי מניע עומס בכוח מכני של 550 פאונד (2,442 ניוטון) ומעביר אותו מרחק של 1 רגל (0.30 מטר) בשנייה אחת, הוא צורך הספק של 1 כוח סוס (746 וואט). אם אותה עבודה (550 רגל-פאונד / 746 ג'ול) מבוצעת בחצי שנייה, מהירות הביצוע מתאכזלת פי שניים וההספק הופך ל-2 כוח סוס (1,490 וואט).
הכוח המכני שמועבר על ידי צילינדר או מנוע למשימה שווה לכוח ההידראולי הנדרש מהצילינדר או מהמונח. עבור מערכת הידראולית המבצעת עבודה בקצב של 550 רגל-פאונד לשנייה (746 ג'ול), הכוח ההידראולי שלה הוא 1 כוח סוס (746 וואט). עם זאת, בנוסחת הכוח המכני, היחידות "רגל (מ)" ו"פאונד (ניטון)" מוחלפות במונחים ההידראוליים "PSI (בר)" ו"GPM (ל/ד)". משמש גורם המרה בחישובי כוח הידראוליקה כדי לבטא את הקשר בין GPM, PSI, רגל ופאונד (או ל/ד, בר, מטר וניטון).
לחישוב הכוח של צילינדר הידראולי או של כל מערכת הידראולית:
כוח סוס = GPM × PSI × 0.000583
וואט = כוח סוס × 746
וואט = (5/3) × ל/ד × בר
לחישוב כוח הפלט של מנוע הידראולי:
כוח סוס = סיבובים לדקה × מומנט (אינץ'-פאונד) / 63,025
קילווט = סיבובים לדקה × מומנט (ניטון-מטר) / 9,543
עד כה דנו במנועים הידראוליים עם פלט סיבובי ובצילינדרים הידראוליים עם פלט ליניארי. כעת נדון בסוג נוסף של מפעיל שמייצר סיבוב בזווית מוגבלת. סוג זה נקרא צילינדר מתנודד או מנוע מתנודד. המבנה שלו קומפקטי, פשוט ויעיל — הוא מייצר מומנט גבוה ודורש רק שטח התקנה קטן, עם התקנה קלה.
מפעילים מתנודדים משמשים לקביעת מיקום במכונות עיבוד, פעולות עקיצה, הרמה או סיבוב עצמים כבדים, הפיכה, מיקום, אביזרי עיבוד, בקרות ימיות, הפעלת שסתומים וכו'.
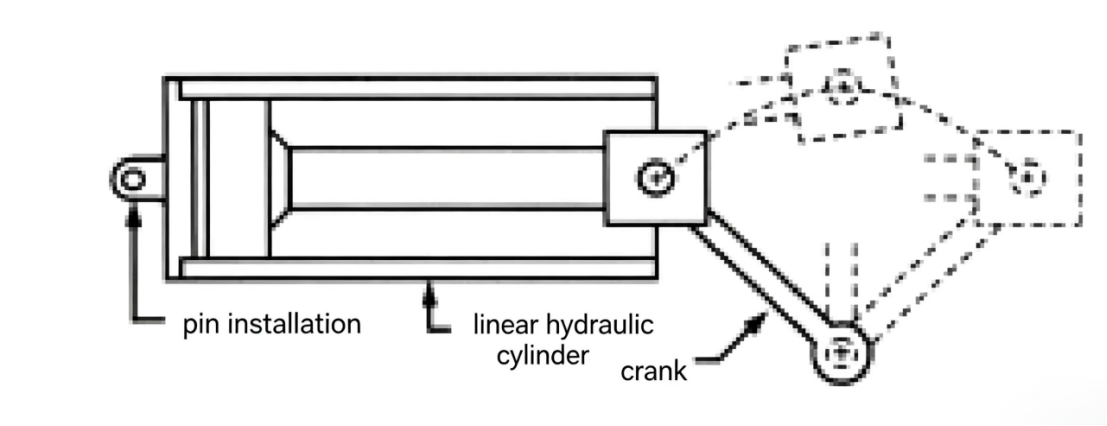
קיימים סוגים רבים של צילינדרים מתנודדים. הפשוט ביותר הוא מנגנון התנודדות הנע על ידי צילינדר הידראולי ליניארי, שבו קצה גוף הצילינדר מחובר באמצעות מסמר, ומטיפת הפיסטון מחוברת למנגנון חוגר שמסובב ציר. צילינדר התנודדות זה ניתן לשליטה על ידי שסתום כיווני 4-דרכי, עם מתגיות הגבלה בכל קצה של המסלול.
כמו כל מכשירים מכניים, למתנע מתנודד זה המבוסס על צילינדר ליניארי יש כמה תכונות בסיסיות, כולל האפשרות להרכיב אותו מחלקים סטנדרטיים שזמינים במדורגים, מה שנותן לעצמאיים גמישות רבה ומשמר על עלויות נמוכות עם חלקי חילוף שזמינים בקלות.
עם זאת, סוג זה של מנוע מתנודד כולל גם תכונות לא רצויות: מוט הפיסטון אינו محمי ומתחבר ישירות לסביבה החיצונית, במיוחד מכיוון שמנגנון המנוף בדרך כלל אינו מוגן, מה שיוצר סיכונים לביטחון. בנוסף, ציר הפעולה נושא בדרך כלל עומסים צידיים גדולים, מה שגורם לתקלות מוקדמות, לבלאי מופרז ולתפיסת חיכוך.
עבור סוג זה הספציפי של מתנע מתנודד, הצילינדר ההידראולי חייב להיות חופשי להתנודד, ולכן עליו להשתמש בחיבורים גמישים מסוג צינור, ובמהלך כל תנועת ההגבהה של הצילינדר, מומנט הפלט אינו קבוע.
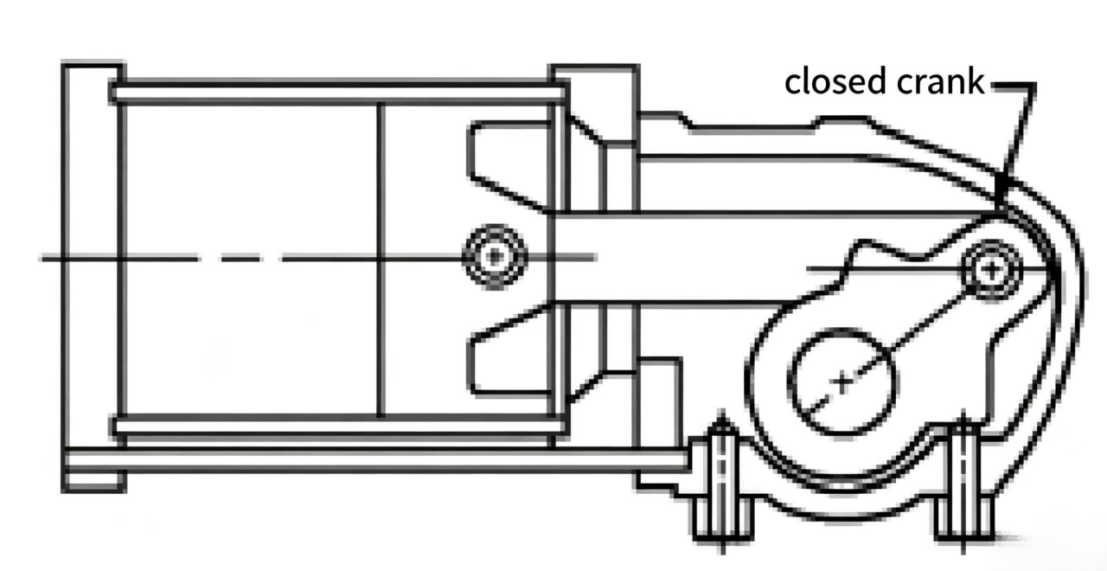
הצילינדר המתנודד המוגן דומה מאוד למנגנון המתנודד המבוסס על צילינדר ליניארי לעיל. הצילינדר המוגן כולל כיסוי מגן שמכסה את מוט הפיסטון ואת המנוף. לציר הפעולה יש בדרך כלל תמיכה נוספת של גלגלות כדי למנוע עומסים צידיים קשים. סוג זה ניתן להתקנה עם שסתומים אלקטרומגנטיים, מתגים לגבולות או מתגי מסע. טווח המסע יכול בדרך כלל להתאים בין כ-85° ל-100°.
סוג נוסף הוא הצילינדר המשתקף עם חזרה בקפיץ, אשר משתמש בצילינדר הידראולי עם קפיץ החזרה כדי להחזיר את ציר הפעלה למצבו המקורי. צילינדרים משתקפים עם חזרה בקפיץ יכולים לייצר מומנטים עד 5,000 אינץ'-פאונד (565 ניוטון-מטר).
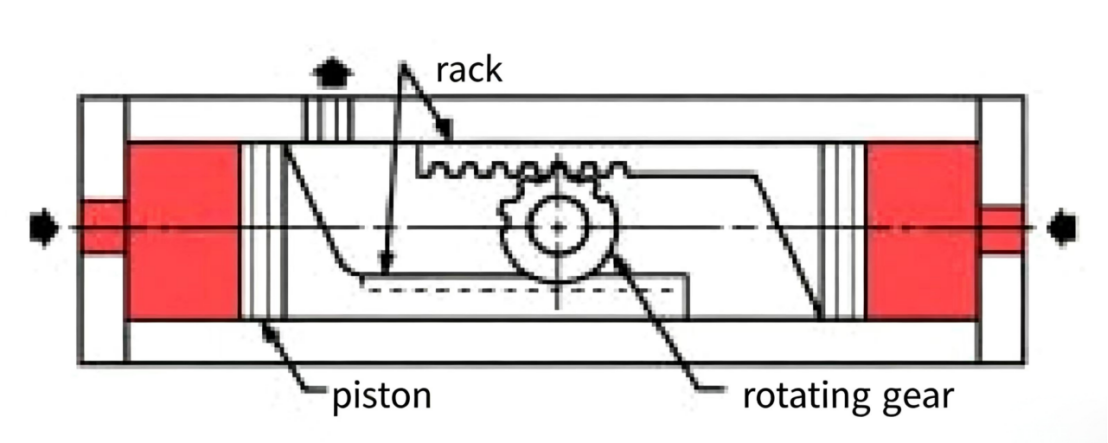
הצילינדר המניע הנפוץ ביותר הוא סוג השיניים-והשנה. סוג זה מסוגל לשמור על מומנט פליטה קבוע בשני הכיוונים לאורך כל הסיבוב המלא. במבנה זה, הלחץ ההידראולי פועל על הפיסטון, דוחף את השיניים המחוברות לפיסטון, מה שגורם לגלגל השינה לסובב את הציר. צילינדרי השיניים-והשנה הסטנדרטיים כוללים תחנות סיבוב של 90°, 180°, 360° ואפילו גדולות יותר. מומנטי הפליטה של צילינדרי השיניים-והשנה יכולים להגיע ל-52,000,000 אינץ'-פאונד (5,876,000 ניוטון-מטר).
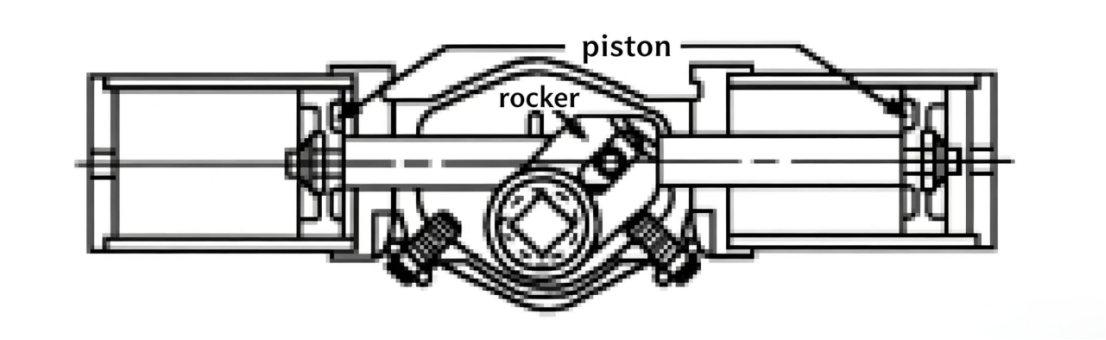
קיים גם מנוע סיבובי מסוג כף. סוג זה יכול להיות חד-כף או רב-כף. מנוע חד-כף מסוגל לסובב עד 280°; מנוע דו-כף מסוגל לסובב עד 200°. מומנט הפלט של המנוע הדו-כף הוא כפול מזה של המנוע החד-כף. סוג זה של מנוע סיבובי מסוגל להשיג מומנטי פלט עד 500,000 אינץ'-פאונד (ניוטון-מטר).
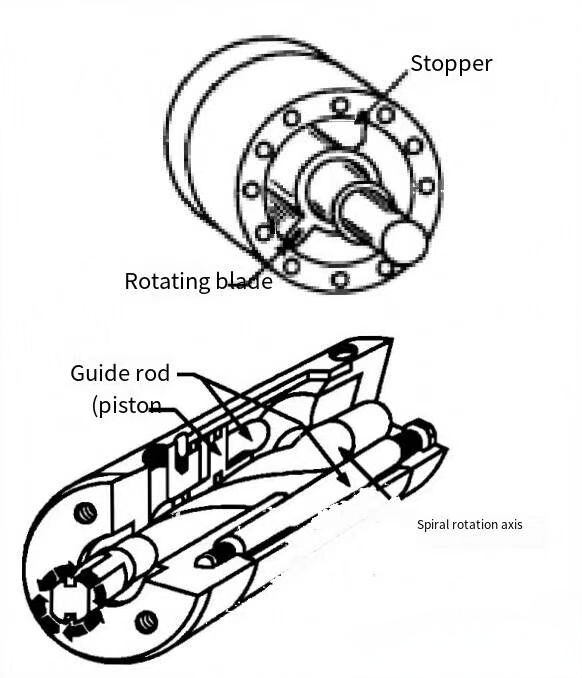
קיים סוג נוסף של מנוע מתנודד שיוצר מומנט סיבוב באמצעות מנגנון שיניים לולייני. שינויים באורך ובשיפוע של השיניים מאפשרים לשנות את זווית הסיבוב בטווח רחב. סוג זה של מנוע מתנודד כולל ציר אחד עם שיניים לולניות, ושרוול פיסטון פנימי עם שיניים על הציר — סיבוב השרוול מוגבל על ידי מוטות מדריך. כאשר השרוול נע בתוך הגליל, הוא גורם לסיבוב הציר. זواויות סיבוב סטנדרטיות הן 90°, 180°, 270° ו-360°, ומומנטי הסיבוב המתקבלים יכולים להגיע עד 1,000,000 אינץ'-ליברה (13,000 ניוטון-מטר).
מנועים מתנודדים מסוג שרשרת-גיזר משתמשים בפיסטונים, בשרשראות ובגיזרים כדי להניע את הציר. מצבר זה כולל בדרך כלל פיסטון אחד גדול (כמתקן הנעה) שמשוך את השרשרת, ופיסטון קטן שמנע דליפת שמן דרך מסלול ההחזרה של השרשרת. מומנטי הסיבוב המתקבלים יכולים להגיע לכ־23,000 אינץ'-ליברה (2,599 ניוטון-מטר), וסיבוב ציר ההנעה יכול להגיע לחמש סיבובים מלאים או ל-1,800°.
לבחירת צילינדר מתנודד המתאים ביותר ליישום מסוים, יש לקחת בחשבון את המומנט, המהירות ושיטת הפעולה. נפרט את תהליך הבחירה של מנוע מתנודד בפרק אחר, ונרחיב על נושאים כגון קביעת האם יש להשתמש בצירוף חד-פעולי או דו-פעולי, האם יש צורך בשיטה לסגירה לולאה סגורה (closed-loop) למיקום מדויק, האם יש צורך באבזם ח buffered (cushioning), וכדומה. כמו כן, נבחן את תדירות ההפעלה או את זמן המחזור.
מהירות המניע היא פונקציה של שיעור הזרימה (גאלון לדקה / ליטר לדקה)
המהירות הליניארית של מוט הפיסטון של צילינדר הידראולי תלויה במהירות שבה משאבה מזרימה נוזל לתא הפיסטון של הצילינדר (גאלון לדקה / ליטר לדקה). המהירות הסיבובית של ציר הגריז של מנוע הידראולי תלויה בשיעור הזרימה (גאלון לדקה / ליטר לדקה) שמוזרם למנוע ההידראולי.
כוח הפלט של המניע הוא פונקציה של הלחץ (PSI / בר)
כוח ההוצאה של צילינדר מבוטח בפסי (בר) כוח ההוצאה על עץ ההנעה של המנוע נקבע על ידי הלחץ הפועל על השטח המונח של הרכב המסתובב של המנוע. הכוח המיוצר על ידי מנוע הוא פונקציה של מהירות המנוע המוכפלת בכוח היציאה של המנוע.
עבור צילינדרים, כוח היציאה מבוטא בפסי, ומהירות מוט הפיסטון ב-gpm. הקבוע 0.000583 מתאר את הקשר בין פסי, gpm, וכוח. עבור מנועים, כוח היציאה מבוטא בקומנט, ומהירות הפעלה של המנוע ב rpm. הקבוע 63,025 מתאר את הקשר בין rpm, עיקול, וכוח.

ברוכים הבאים ל-HOVOO, מפעל חותמות סיני. ייצור של חותמות PU, גומי ו-PTFE. החתימות כוללות O-ring, חתימה של פיסטון, חתימה של ציר, חוגי Gray וחתימה של גז.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}