中国南京市鼓楼区穆府東路33-99番地 [email protected] | [email protected]
中国南京市鼓楼区穆府東路33-99番地 [email protected] | [email protected]

油圧シリンダは、油圧エネルギーを直線的または一次元的な機械運動に変換します。可動負荷に接続されることで、作業を行います。
前述の章で紹介した通り、油圧シリンダは主にシリンダ本体、両端を密閉するキャップ、ピストン、ピストンロッド、および流入・流出ポートから構成されます。各端には1つのポートがあり、一方は油の流入用、他方は油の流出用です。
図6-1 標準二作用油圧シリンダ。油は左側ポートから流入し、ロッドを伸長させます。右側ポートから油が流入すると、ロッドは収縮します。
シリンダーのストローク全体にわたり、油圧エネルギーが可動ピストンに作用します。この油圧エネルギーによって生じる圧力は、負荷によって生じる抵抗を超えることはありません。既知の寸法を持つシリンダーについて、特定の出力力を得るために必要な作動圧力を知る必要があります。これは(摩擦を無視した場合)以下の式で求められます。
圧力=力/面積
この式を用いる際には、面積と圧力が与えられて出力力を求める場合、あるいは面積と出力力が既知で圧力を求める場合があります。実際には、通常シリンダーのボア径が既知であり、ピストン面積を計算する必要がありますが、円の面積を計算することは、正方形の面積を計算するのと同じくらい簡単です。
円の面積は、その直径を1辺とする正方形の面積の約78.54%に等しくなります。より正確には次の通りです。
円の面積 = 直径^2 × 0.7854
他によく使われる式:
円の面積 = π × D^2 ÷ 4

図6-2 円の面積=D²×0.7854。この単純な公式は、油圧シリンダの計算で頻繁に使用される。
油圧エネルギーが作用する距離によって、どれだけの仕事が行われるかが決まる——この距離がシリンダのストロークである。前述した通り、油圧圧力を用いて力を増幅させることは、一見すると何のコストもかからないように思われる。特定の状況(システムが静止している場合)では、小さな力で非常に大きな力を発生させることができ、明らかに犠牲となるものはない。しかし、この増幅された力が同時に移動を引き起こす場合、何かが犠牲となる:それは距離である。
すべての油圧シリンダには、そのストローク(インチ)とピストン面積(インチ²)の積に等しい容積(変位量)があり、その単位はインチ³(cm³)となる。
シリンダ容積=ピストン面積×ストローク
(in³)=(in²)×(in) または (cm³)=(cm²)×(cm)
例:上部のピストンが2インチ(5.08 cm)移動すると、下部シリンダのピストンは1インチ(2.54 cm)移動します。両方のピストンが行う仕事量は等しくなります。上部ピストンは20立方インチ(327.8 cm³)の流体を押し出します——下部シリンダのピストンも、同量の20立方インチ(327.8 cm³)の流体によって押し出されます。
油圧シリンダのピストンロッドの速度は、ピストン後方のチャンバーに流体が供給される速さに依存します。ピストンロッド速度の計算式は以下のとおりです。
ロッド速度(インチ/分)=流量(gpm)×231÷ピストン面積(平方インチ)
ロッド速度(m/s)=流量(Lpm)×0.1667÷ピストン面積(cm²)

油圧モータとは、油圧エネルギーを回転機械エネルギーに変換するアクチュエータであり、この回転エネルギーはドライブシャフトを介して負荷に伝達されます。
すべての油圧モータは基本的に、入口および出口ポートを備えたハウジングと、ドライブシャフトに接続された回転アセンブリから構成されています。
図示した例はベーン式油圧モーターである。回転部品は、ロータおよびロータのスロット内を自由に出入りするベーンから構成される。この回転部品はハウジング内に偏心して取り付けられており、駆動シャフトが負荷に接続されている。圧力油が入口チャンバーに流入すると、その油圧エネルギーが入口チャンバー内の露出したベーン面に作用する。上部のベーンの圧力油にさらされる面積が大きいため、ロータに作用する力は不平衡となり、ロータが回転する。
油が体積が減少する出口チャンバーに到達すると、そこから排出される。
注意:この種のモーターが正常に作動するためには、ベーンが完全に押し出され、ハウジングと確実なシール状態を保つ必要がある。油圧ポンプとは異なり、ベーンは遠心力によって押し出されることはない——モーターのベーンを押し出す方法については、後続の章で説明する。
図6-6 バンモータの動作。圧力油がベーン面に作用する。上部のベーンの圧力露出面積が下部のベーンのそれより大きいため、合力によってロータが回転する。
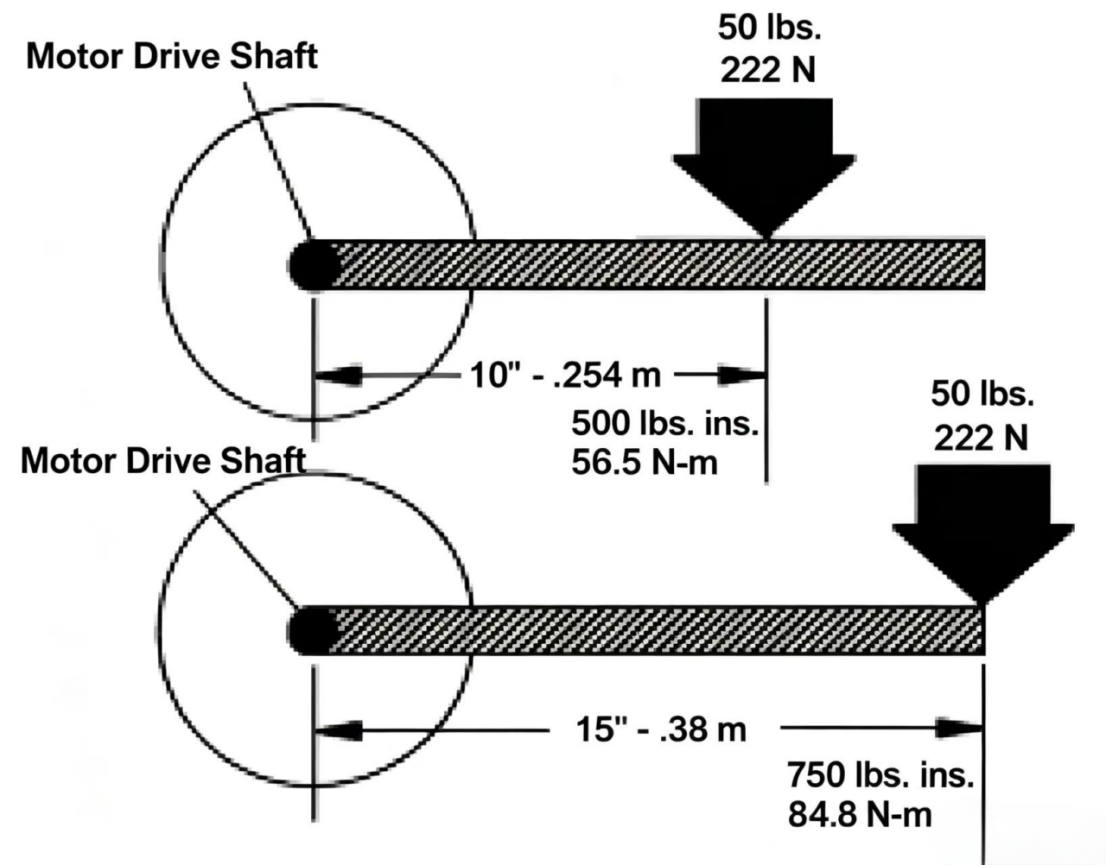
トルクとは、回転またはねじりを生じさせる力である。トルクは、シャフト中心線から離れた位置に作用する力である。トルクの単位はlb・in(またはNm)である。
トルクは、力が油圧モータのシャフト中心線に対してどの位置に作用しているかを示す。トルクの公式は次のとおりである:
トルク = 力 × シャフト中心線からの距離
(lb・in) = (lb) × (in) または (Nm) = (N) × (m)
図の例:モーターシャフトに接続されたクランクに50 lbs(222 N)の力が作用しています。シャフト中心と力の作用点との距離は10インチ(0.254 m)です。このとき、シャフトに生じるトルクは500 in・lbs(56.5 Nm)です。同じ50 lbs(222 N)の力が15インチ(0.38 m)のクランクアームに作用する場合、シャフトに生じるトルクは750 in・lbs(84.6 Nm)となります。力の作用点がシャフト中心から離れるほど、トルクは大きくなります。なお、トルクは運動を伴わないことに注意してください。
モータードライブシャフトに接続された負荷は、上記のようにトルクを発生させます。油圧モーターの場合、これは抵抗であり、油圧モーターの回転部品に作用する油圧によって克服される必要があります。
トルク(in・lbs)=圧力(psi)× モーターの排気量(in³)/(2 × π)
トルク(Nm)=圧力(bar)× モーターの排気量(cm³)/(20 × π)
油圧モーターシャフト回転速度は、流体の供給速度によって決まります。計算式は以下の通りです。
モーター回転速度(rpm)=流量(gpm)× 231 / モーターの排気量(in³/rev)
モーター回転速度(rpm)=流量(L/min)×1000/モーター排気量(mL/rev)
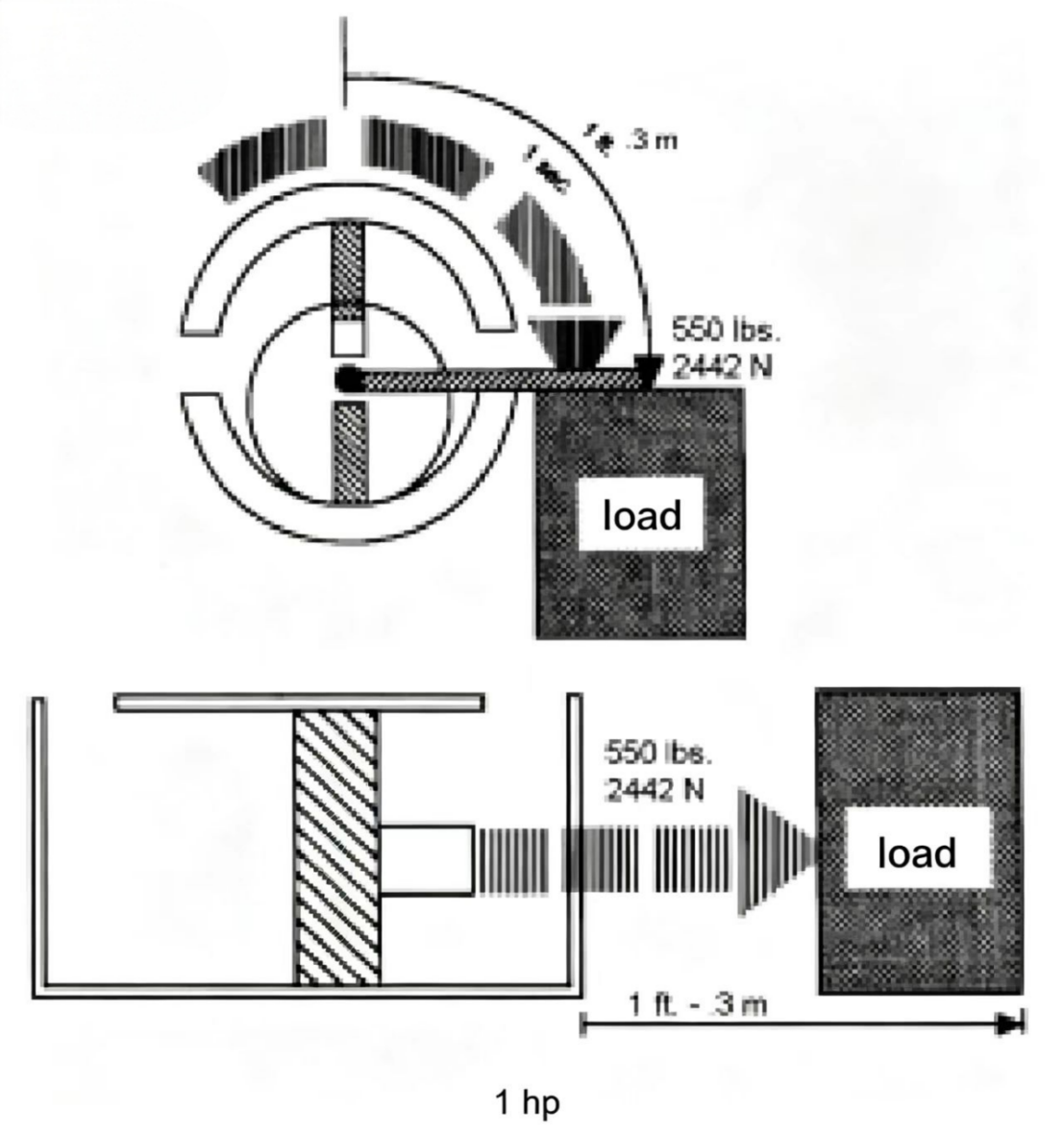
前章では、仕事率(パワー)とは単位時間あたりにされる仕事の量であることを学びました。すなわち、馬力(hp)=ft・lb/時間、またはワット(W)=J/時間です。
また、馬力(hp)およびワット(W)は、それぞれ仕事率(パワー)の単位であることも知っています。たとえば、油圧シリンダーや油圧モーターが550 lb(2,442 N)の機械的力を負荷に加え、それを1秒間に1 ft(0.30 m)動かした場合、その仕事には1 hp(746 W)のパワーが使用されたことになります。同様の仕事(550 ft・lb/746 J)を0.5秒で行った場合、作業速度は2倍になり、必要なパワーは2 hp(1,490 W)となります。
シリンダーやモーターが負荷に伝達する機械的動力は、シリンダーまたはモーターに要求される油圧動力と等しい。1秒間に550 ft・lb(746 J)の仕事率で作動する油圧システムの油圧動力は、1 hp(746 W)である。ただし、機械的動力の公式における「ft(m)」および「lb(N)」は、油圧用語の「psi(bar)」および「gpm(L/min)」に置き換えられる。「gpm、psi、ft、lb(またはL/min、bar、m、N)」間の関係を表すために、油圧動力の計算では変換係数が用いられる。
油圧シリンダーまたは全体の油圧システムの動力を計算するには:
hp = gpm × psi × 0.000583
W = hp × 746
W = (5/3) × L/min × bar
油圧モーターの出力動力を計算するには:
hp = rpm × トルク(in・lb)/63,025
kW = rpm × トルク(N・m)/9,543
これまで、回転出力を持つ油圧モータと直線出力を持つ油圧シリンダについて説明してきました。次に、限定角度の回転を発生させる別のタイプのアクチュエータについて説明します。このタイプは「オシレーティングシリンダ」または「オシレーティングモータ」と呼ばれます。その構造はコンパクトでシンプルかつ効率的であり、高いトルクを発生させながら、設置スペースが小さく、取付も容易です。
オシレーティングアクチュエータは、工作機械のインデックス操作、曲げ加工、重物のリフトまたは回転、反転、位置決め、工作物治具、船舶用制御装置、バルブ操作などに使用されます。
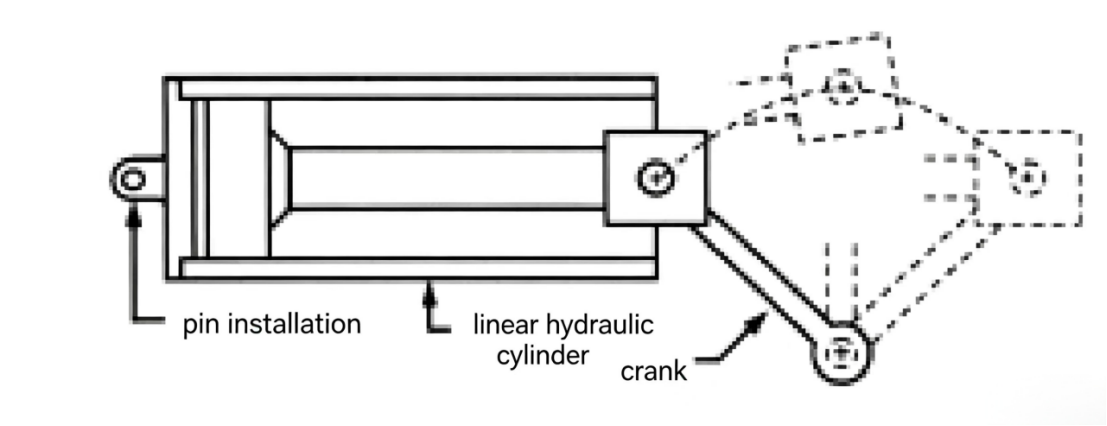
オシレーティングシリンダには多くの種類があります。最も単純なものは、直線型油圧シリンダを駆動源とするオシレーティング機構であり、シリンダ本体の端部にピンを取り付け、ピストンロッドをクランクに接続してシャフトを回転駆動する方式です。このオシレーティングシリンダは、4方向制御弁で制御でき、行程の両端にはリミットスイッチを設置できます。
すべての機械装置と同様に、この直線シリンダーをベースとした振動式アクチュエータには、標準的な市販部品で組み立て可能であるという基本的な特徴があり、設計者に高い自由度を提供するとともに、入手が容易なスペアパーツによりコストを低く抑えることができます。
しかし、この種の振動式アクチュエータには、望ましくない特徴も存在します。ピストンロッドが保護されておらず、周囲環境に直接接触するため、特にクランク機構が通常密閉されていないことから、安全性上のリスクが生じます。また、ドライブシャフトには通常大きな横方向荷重が作用し、早期の故障、過度な摩耗、および動きの固さ(バインディング)を引き起こします。
この特定のタイプの振動式アクチュエータでは、油圧シリンダーが自由に振り動ける必要があるため、柔軟なホース接続を採用しなければなりません。また、シリンダーの全ストロークにわたり出力トルクは一定ではありません。
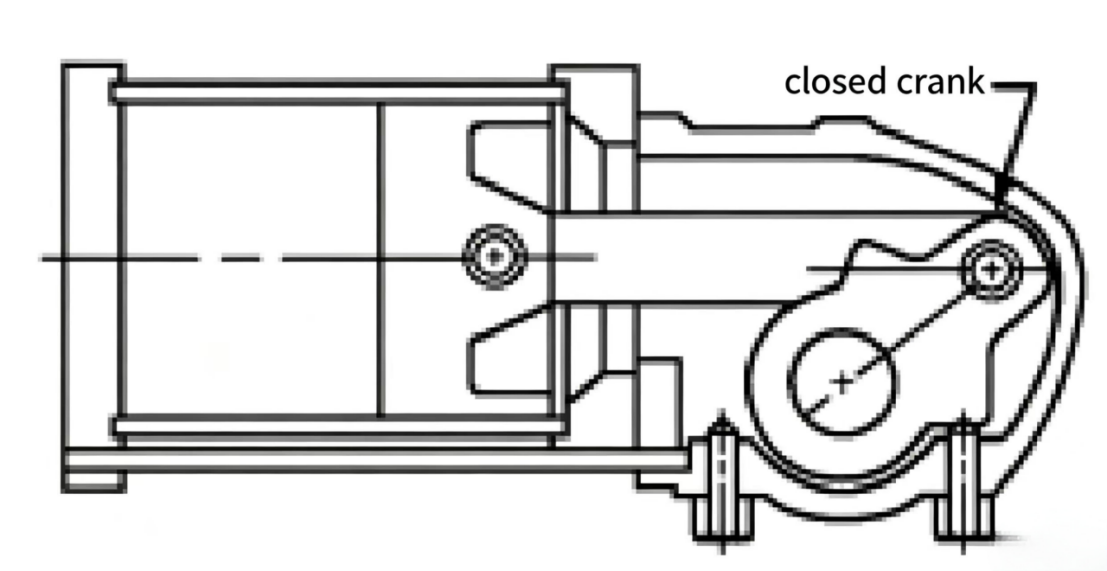
封入式振動シリンダーは、上記の直線シリンダーをベースとした振動機構と非常に類似しています。封入式シリンダーには、ピストンロッドおよびクランクを覆う保護カバーが備わっています。ドライブシャフトには通常、過度な横方向負荷を防止するための追加ベアリング支持が設けられています。このタイプには、ソレノイドバルブ、リミットスイッチ、またはストロークスイッチを取り付けることができます。ストローク範囲は通常、約85°~100°の間で調整可能です。
別のタイプとして、スプリング復帰式振動シリンダーがあります。これは、復帰用スプリング付き油圧シリンダーを用いてドライブシャフトを元の位置へ戻す方式です。スプリング復帰式振動シリンダーの出力トルクは最大5,000インチ・ポンド(565 Nm)まで可能です。

最も一般的な振動シリンダはラック・アンド・ピニオン式です。このタイプは、全回転範囲にわたり、両方向で一定の出力トルクを維持できます。この構成では、油圧がピストンに作用し、ピストンに接続されたラックを押し、そのラックがピニオンギアを駆動してシャフトを回転させます。標準的なラック・アンド・ピニオン式シリンダの回転ストロークは、90°、180°、360°、あるいはそれ以上のものがあります。ラック・アンド・ピニオン式シリンダの出力トルクは最大52,000,000インチ・ポンド(5,876,000 Nm)に達します。

ベーン式振動モータも利用可能です。このタイプは単ベーン式または多ベーン式のいずれかです。単ベーン式モータは280°まで回転可能であり、デュアルベーン式モータは200°まで回転可能です。デュアルベーン式の出力トルクは、単ベーン式の2倍です。この種の振動モータは、最大500,000インチ・ポンド(Nm)の出力トルクを実現できます。

トルクを生成するためにヘリカルスプライン機構を用いる別のタイプの振動モータがあります。スプラインの長さおよびピッチを変化させることで、回転ストロークを広範囲にわたって調整できます。このタイプの振動モータは、シャフト上に内面スプラインを備えたピストンスリーブを有する1本のヘリカルスプラインシャフトから構成されており、ピストンスリーブの回転はガイドロッドによって制限されます。ピストンスリーブがシリンダ内を移動すると、スプラインシャフトを回転させます。標準的な回転ストロークは90°、180°、270°および360°であり、出力トルクは最大1,000,000 in.lbs(13,000 Nm)です。
チェーン・スプロケット式振動モータは、ピストン、チェーンおよびスプロケットを用いてシャフトを駆動します。このアクチュエータは通常、チェーンを引くための駆動装置として大きなピストン1個と、復帰用チェーン経路からのオイル漏れを防止するための小さなピストン1個を備えています。出力トルクは約23,000 in.lbs(2,599 Nm)に達し、駆動シャフトの回転は最大5回転(1,800°)に達します。
特定の用途に最も適したオシレーティング・シリンダを選定するには、トルク、回転速度、および作動方式のマッチングがすべて関係します。実際のオシレーティング・モータの選定については、別の章で説明し、シングルアクションかダブルアクションかの判断、クローズドループ位置決めの採用有無、クッション機能の必要性などについてさらに詳しく検討します。また、作動周波数またはサイクル期間についても検討します。
アクチュエータの速度は、流量(gpm/L/min)によって決まります
油圧シリンダのピストンロッドの直線速度は、ポンプがシリンダのピストン室に流体を注入する速度(gpm/L/min)に依存します。油圧モータの駆動シャフトの回転速度は、油圧モータに注入される流量(gpm/L/min)に依存します。
アクチュエータの出力力は、圧力(psi/bar)によって決まります
シリンダーの出力力は、psi(bar)で表されます。モーター駆動シャフトの出力力は、モーターの回転部品に作用する圧力とその露出面積によって決定されます。アクチュエーターが発生する出力は、アクチュエーターの速度と出力力の積の関数です。
シリンダーの場合、出力力はpsiで表され、ピストンロッドの速度はgpmで表されます。定数0.000583は、psi、gpmおよび出力の間の関係を示します。モーターの場合、出力力はトルクで表され、モーターの運転速度はrpmで表されます。定数63,025は、rpm、トルクおよび出力の間の関係を示します。

HOVOOにようこそ、中国のシール工場です。PU、ゴム、PTFEシールの製造を行っています。シールにはOリング、ピストンシール、ロッドシール、グレーリング、ガスシールが含まれます。



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}