33-99 No. Via Mufu E. Districte Gulou, Nanjing, Sinus [email protected] | [email protected]
33-99 No. Via Mufu E. Districte Gulou, Nanjing, Sinus [email protected] | [email protected]

Cilindrus hydraulicus energiam hydraulici in motum mechanicum rectilineum vel linearem convertit. Ad onus mobile coniunctus opus praestat.
Ut in capitulis superioribus introductum est, cilindrus hydraulicus praecipue constat tubo, duobus operculis clausis extremis, pistone, baculo pistonis, et portubus introductus ac egressus. Uterque extremus unum habet portum — unum ad oleum intrans, alterum ad oleum egrediens.
figura 6-1: Cilindrus hydraulicus duplex standardis. Oleum per portum sinistrum ingreditur, baculum extendens; oleum per portum dextrum eundem retrahit.
Per totam cursus cylindri, energia hydraulica agit in pistone mobile. Pressio ab hac energia hydraulica generata non superabit resistentiam a onere ortam. Cylindro notis dimensionibus, scire debemus quam pressionem operativam producat vim specificam ex eodem. Haec (frictione neglecta) formula sequente determinari potest:
Pressio = Vis ÷ Superficies
Cum haec formula utitur, aut area et pressio dantur ut vis ex eodem inveniatur, aut area et vis ex eodem nota sunt ut pressio inveniatur. In praxi, saepissime diametrum foraminis cylindri scimus et aream pistonis calculare debemus — sed area circuli calculare est tam facile quam area quadrati.
Area circuli aequat fere 78,54 % areae quadrati cuius latus aequat diametrum circuli. Accuratius:
Area circuli = Diametrum² × 0,7854
Alia formula communiter usitata:
Area circuli = π × D² ÷ 4

Figura 6-2 Area circuli = D² × 0,7854. Haec simplex formula in calculis cylindrorum hydraulicorum saepissime utitur.
Distantia qua energia hydraulica agit determinat quantitatem operis effecti — haec distantia est cursus cylindri. Ut supra notatum est, vis per pressionem hydraulicam amplificare videtur nihil costare. In quibusdam casibus specialibus — cum systema statico est — parva vis magnam valde vim producere potest sine apparenti dispendio. Si tamen haec amplificata vis etiam motum efficiat, aliquid dispendii patitur: distantia.
Omnis cylindrus hydraulicus volumen (displationem) habet aequale suo cursui (in) multiplicato per aream pistonis sui (in²), quod volumen in in³ (cm³) reddit.
Volumen cylindri = Area pistonis × Cursus
(in³) = (in²) × (in) aut (cm³) = (cm²) × (cm)
Exemplum: Piston superior 2 pollices (5,08 cm) movendus est, ut piston inferior cylindri 1 pollicem (2,54 cm) moveat. Ambō pistōnēs eundem labōrem faciunt. Piston superior 20 pollicēs cubīcī (327,8 cm³) flūidis expellit — et piston inferior cylindri eōdem volumine flūidōrum 20 pollicēs cubīcī (327,8 cm³) impellitur.
Velocitās vastigii pistōnis hydraulici pendet ex celeritāte qua flūidum cameram post pistōnem implēt. Formulae pro velocitāte vastigii pistōnis:
Velocitās vastigii (pollicēs/min) = Rātio fluxūs (gallōnēs/min) × 231 ÷ Area pistōnis (pollicēs²)
Velocitās vastigii (m/s) = Rātio fluxūs (litra/min) × 0,1667 ÷ Area pistōnis (cm²)

Motor hydraulicus est actuator quī energiam hydraulicam in energiam mechanicam rotātoriam convertit. Haec energia rotātōria per axem trāctōrem ad onus applicātur.
Omnia mōtōria hydraulica essentialem habent carcassum cum portīs intrantis et ēgressūs, et conglobātiōnem rotātoriam axī trāctōrī connexām.
Exemplum ostensum est motor hydraulicus vane-typus. Apparatus rotans constat rotoris et lamellarum quae libere in et ex sclopetis rotoris gliscent. Apparatus rotans in carcassu excentricus montatur; axis impellens ad onus connectitur. Cum oleum sub pressione in cameram introitum ingreditur, energia hydraulica in faciem lamellae patentem in camera introitus agit. Quia area superioris lamellae quae oleo sub pressione exponitur maior est, vis in rotoris imponitur inaequalis — rotor vertitur.
Cum oleum ad cameram exitus cum minuente volumine pervenit, effunditur.
Nota: Antequam hic motor typus normaliter operari possit, lamellae extendendae sunt et sigillum firmum cum carcasso habere debent. Contra motorem hydraulicum, lamellae vi centrifuga non expelli possunt — methodus lamellarum motoris extendendarum in capite ulteriore tractabitur.
Figura 6-6: Operatio motoris lamellaris. Oleum sub pressione agit in facies laminarum. Quia area superior laminarum exposita pressioni maior est quam area inferior, vis netta rotat rotorem.
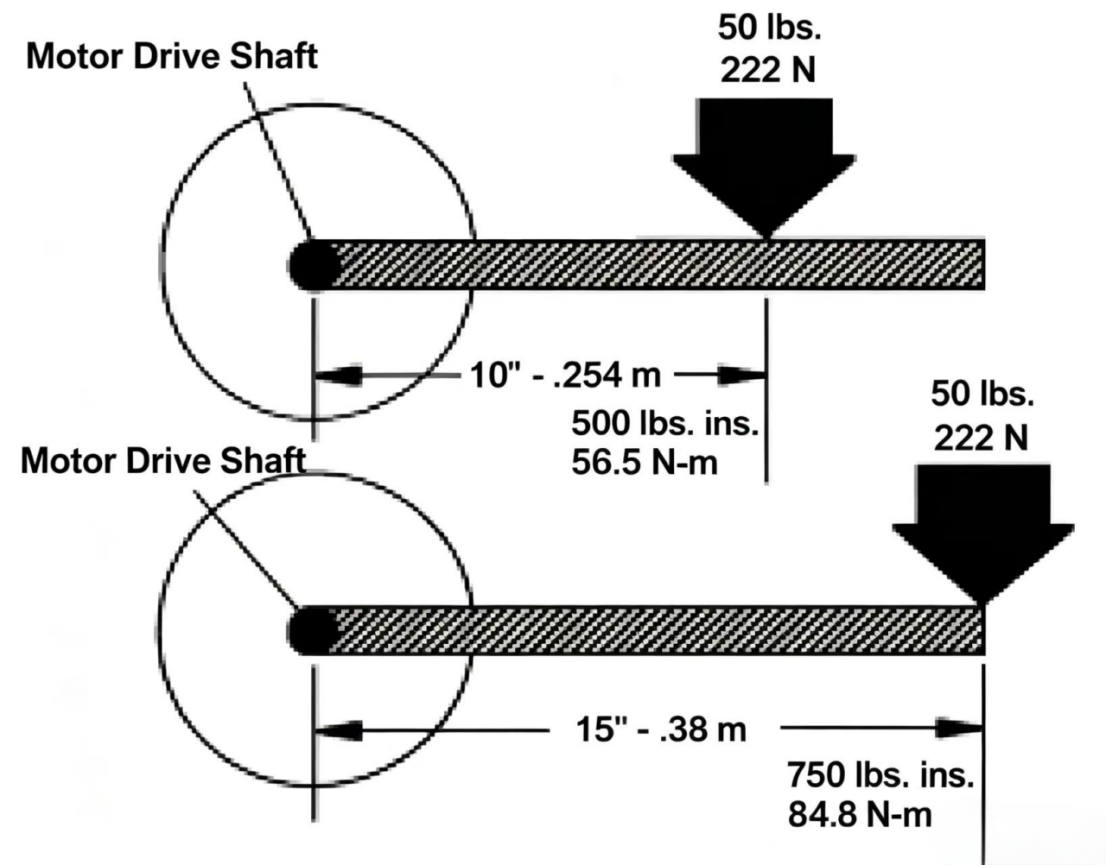
Torque est vis rotatoria aut contortiva. Torque est vis quae agit ad distantiam a linea centrali axis. Unitas torque est libra-pollicis (sive newton-metrum).
Formula torque nobis indicat positionem vis relativam ad lineam centralem axis motoris hydraulici. Formula torque est:
Torque = Vis × Distantia ab axe centrali
(libra-pollicis) = (librae) × (pollices) sive (newton-metrum) = (newton) × (metri)
Exemplum ex figura: Vis 50 librarum (222 N) agit super manubrium connexum cum axis motoris. Distantia inter centrum axis et vim est 10 pollices (0.254 m). Momentum torquens in axe est 500 pollicum-librarum (56.5 Nm). Si eadem vis 50 librarum (222 N) agat super brachium manubrii longum 15 pollices (0.38 m), momentum torquens in axe est 750 pollicum-librarum (84.6 Nm). Quo longius a centro axis vis agit, eo maior est momentum torquens. Notandum est momentum torquens motum nullum involvere.
Onus ad axem motoris coniunctum momentum torquens producit ut supra descriptum. In motore hydraulicō, hoc est resistentia — quae a pressione hydraulica super componentes rotantes motoris vincenda est.
Momentum torquens (pollicum-librarum) = psi × Capacitas motoris (pollicum³) ÷ (2 × π)
Momentum torquens (Nm) = bar × Capacitas motoris (cm³) ÷ (20 × π)
Velocitas axis motoris hydraulicī determinatur velocitate qua fluidum inicitur. Formula est:
Velocitas motoris (rpm) = Fluxus (gpm) × 231 ÷ Capacitas motoris (pollicum³/rev)
Velocitas motoris (rpm) = Fluxus (Lpm) × 1000 ÷ Capacitas motoris (ml/rev)
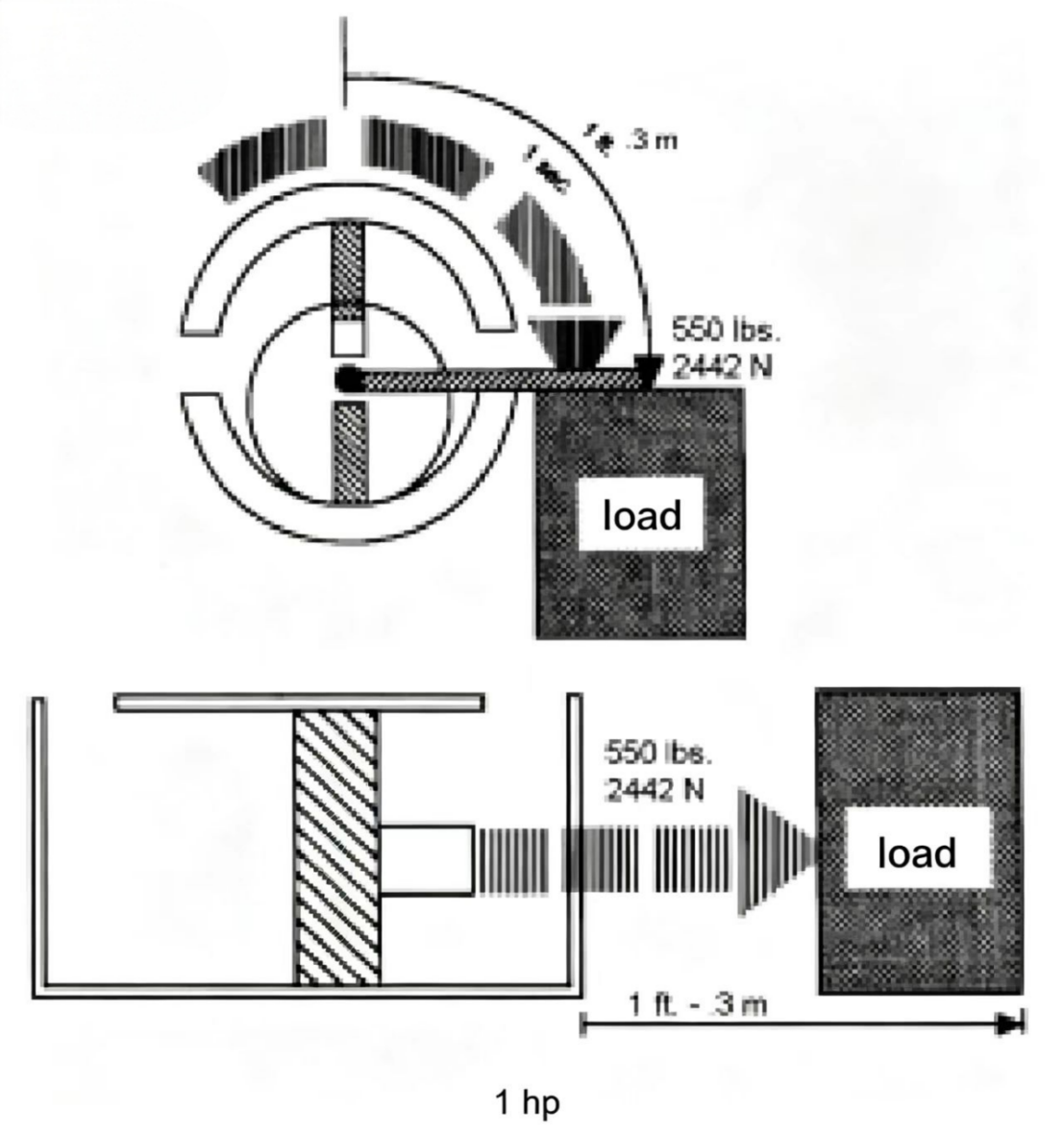
In capitulis superioribus didicimus vim esse celeritatem operandi, id est, hp = ft·lb/tempus, aut W = J/tempus.
Scimus etiam quod horsepower (hp) aut watt (W) est unitas potestatis. Si cylindrus hydraulicus aut motor hydraulicus onus movet vi mechanica 550 lb (2 442 N) et id per 1 pedem (0,30 m) in uno secundo movet, usus est 1 hp (746 W) potestatis. Si eadem opera (550 ft·lb / 746 J) in dimidio secundo perficiuntur, celeritas operis duplatur et potestas est 2 hp (1 490 W).
Potentia mechanica quae a cylindro aut motore ad onus transmittitur aequat potentiam hydrauliciam quam cylindrus aut motor requirit. Si systema hydraulicum opus facit celeritate 550 ft·lb/sec (746 J), eius potentia hydraulica est 1 hp (746 W). Tamen in formula potentiae mechanicae "ft (m)" et "lb (N)" substituuntur per terminos hydraulicos "psi (bar)" et "gpm (Lpm)". Factor conversionis in calculis potentiae hydraulicae utitur ad exprimendam relationem inter gpm, psi, ft et lb (aut Lpm, bar, m et N).
Ad calculandam potentiam cylindri hydraulici aut totius systematis hydraulici:
hp = gpm × psi × 0,000583
W = hp × 746
W = (5/3) × Lpm × bar
Ad calculandam potentiam exsulentem motoris hydraulici:
hp = rpm × Momentum (in·lb) / 63 025
kW = rpm × Momentum (Nm) / 9 543
Hucusque de motoribus hydraulicis cum motu rotatorio et de cylindris hydraulicis cum motu lineari egimus. Nunc alterum actuatorum genus, quod rotationem anguli limitatae producit, pertractabimus. Hoc genus oscillans cylindrus aut motor oscillans appellatur. Structura eius compacta, simplex et efficax est — torque magnum generat et modicum spatium installationis postulat, cum facile installari possit.
Actuatores oscillantes in machinis utensilibus ad indexationem, ad operationes flectendas, ad elevandum aut rotandum gravia, ad inversiones, ad positionem, ad fixationes mechanicas, ad gubernacula nautica, ad actionem valvularum, etc. utuntur.
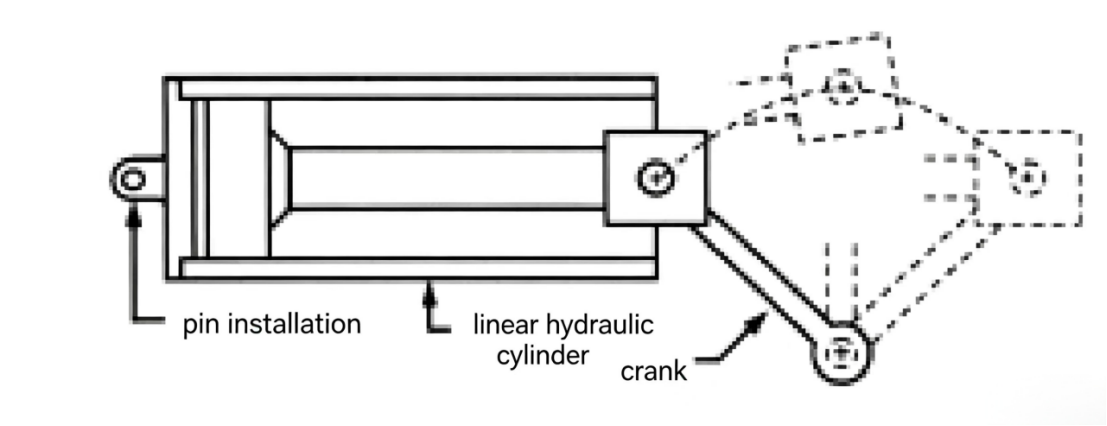
Multae sunt species cylindrorum oscillantium. Simplicissimus est mechanismus oscillans a cylindro hydraulico lineari impulsus, ubi extremum tubae cylindri per pernem fixatum est, et vectis pistonis ad manubrium connectitur quod axem in motum rotatorium agit. Hic cylindrus oscillans per valvulam directionalem quattuor-viam regi potest, cum interruptoribus finium in utroque cursus extremo.
Sicut omnia machinalia instrumenta, hic oscillans actuarius basi cylindri linearis quaedam fundamentalia habet characteristicas, inter quas est ut ex partibus normalibus et in commercio facile reperibilibus componi possit, quod magnam flexibilitatem designatoribus praebet et impensas minuit cum reservis partibus facile adhibendis.
Huiusmodi autem oscillans actuarius etiam proprietates indesiderabiles habet: baculus pistonicus non protegitur et directe cum ambiente circumstante interagit, praesertim cum machinae cinguli cranci saepe non sint clausae, quod pericula secundum se trahit. Praeterea, axis motorius saepe magnas onerum lateralia sustinet, quae praecocem defectum, nimium attritionem et impactionem causant.
Ad hunc specialem oscillantis actuarii typum, cylindrus hydraulicus libere oscillare debet; ideo coniunctiones flexibiles tuborum necessariae sunt, et per totam cursus longitudinem cylindri momentum torquens productum non constans est.
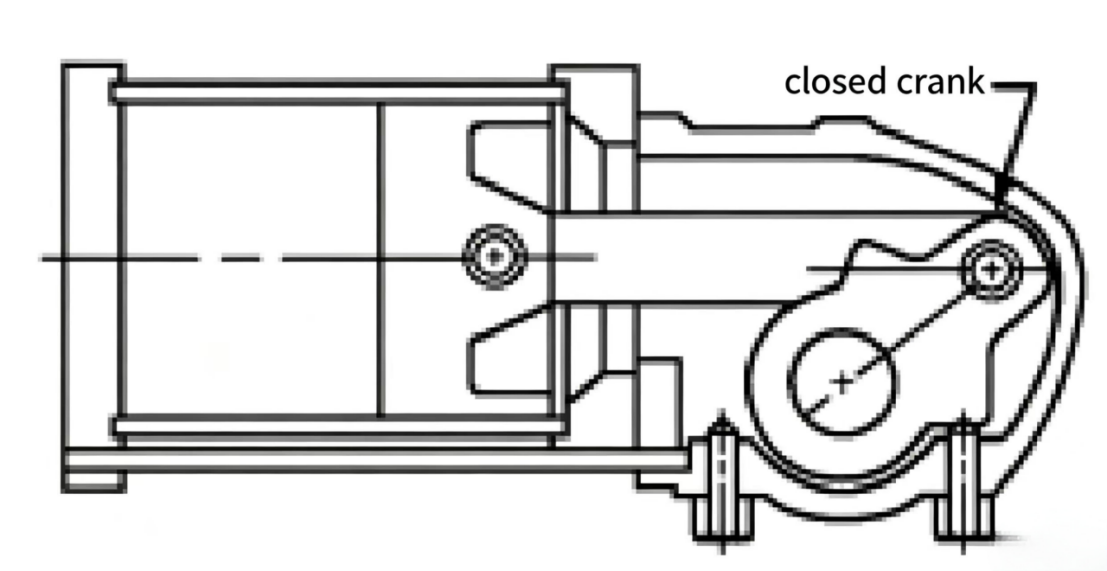
Cilindrus oscillans inclusus valde similis est mechanismo oscillanti supra descripto, qui in cylindro lineari fundatur. Cilindrus inclusus tegumentum protectivum habet, quod baculum pistonis et manubrium circumcludit. Axis motorius saepe ulterius munitur supportibus rotulorum, ut gravissimae oneris laterales impediantur. Huius generis apparatus cum valvulis solenoidibus, interruptoribus finium, aut interruptoribus cursus instrui potest. Intervallo cursus saepius inter circiter 85° et 100° regolari potest.
Aliud genus est cilindrus oscillans rediens per molam, qui cylindrum hydraulicum cum mola reditura utitur, ut axem motorem ad locum pristinum reducat. Cilindri oscillantes redientes per molam torques usque ad 5 000 in.lbs (565 Nm) producere possunt.

Frequens oscillans cylindrus est is qui denticulatum et rotulam habet. Hic typus constantem momenti torquentis effectionem utroque in sensu per totam rotationem servare potest. In hac dispositione, pressio hydraulica in pistorem agit, dentes impellens qui ad pistorem connexus est, quibus rotula movetur ut axis torqueatur. Cylindri denticulati et rotulati normales habent rotationes 90°, 180°, 360°, aut etiam maiores. Momenta torquentia cylindrorum denticulatorum et rotulatorum usque ad 52 000 000 pollices-librae (5 876 000 Nm) attingere possunt.

Est etiam motor oscillans lamellaris. Hic typus unius lamellae aut plurium lamellarum esse potest. Motor unius lamellae 280° rotare potest; motor duplex lamellaris 200° rotare potest. Momentum torquens duplex lamellare duplum est momenti torquentis unius lamellae. Hic motor oscillans momenta torquentia usque ad 500 000 pollices-librae (Nm) attingere potest.

Est alius oscillans motor qui torque generat per mechanismum helicalem splinam. Mutationes in longitudine et passu splinae permittunt variationem cursus rotationis per latum intervallum. Huiusmodi motor oscillans unum habet axem splinae helicalis cum manica pistonicia interne splinata super axem — rotatio manicae pistoniciae a baculis directivis cohibetur. Cum manica pistonica movetur intra cylindrum, axem splinae impellit ut rotate. Cursus rotationis normales sunt 90°, 180°, 270°, et 360°, cum torque output usque ad 1 000 000 in.lbs (13 000 Nm).
Motors oscillantes catenae-et-rotae dentatae utuntur pistonibus, catenis, et rotis dentatis ad axem impellendum. Hic actuarius saepe unum magnum habet pistorem (ut instrumentum impellens) ad catenam trahendam, et parvum pistorem ad effugium olei per viam catenae reditivae prohibendum. Torques output attingere possunt fere 23 000 in.lbs (2 599 Nm), et rotatio axis impellentis usque ad quinque revolutiones integras aut 1 800° pervenire potest.
Ad seligendum idoneissimum cylindrum oscillantem ad certam applicationem, omnia haec spectanda sunt: momentum torquens, velocitas, et modus operandi. Delectionem actuorum oscillantium in alio capite describemus, atque ulterius pertractabimus, utrum actores singuli an duplices sint eligendi, num positio in circuitu clauso requiratur, num amortizatio necessaria sit, etc. Etiam frequencia operationis vel periodus cycli examinabitur.
Velocitas actuatoris functio est fluxus (gpm, L/min).
Velocitas linearis virgae pistonis cylindri hydraulici pendet a velocitate qua pompa fluidum in cameram pistonis cylindri infundit (gpm, L/min). Velocitas rotatoria axis motoris hydraulici pendet a fluxu (gpm, L/min) qui in motorem hydraulicum infunditur.
Fortitudo exeuntis actuatoris functio est pressionis (psi, bar).
Vis producta a cylindro exprimitur in psi (bar) — vis producta in axis motus motoris determinatur a pressione quae agit in aream expositam conformationis rotantis motoris. Potentia producta ab actuatore est functio velocitatis actuantis multiplicatae per vim productam actuantis.
Pro cylindris, vis producta exprimitur in psi, et velocitas baculi pistonicis in gpm. Constante 0.000583 describitur relatio inter psi, gpm, et potentiam. Pro motoribus, vis producta exprimitur in momento torquente, et velocitas operationis motoris in rpm. Constante 63 025 describitur relatio inter rpm, momentum torquens, et potentiam.

Salve in HOVOO, fabbrica sigilli Sinensis. Productio sigillorum PU, Rubber et PTFE. Sigilla comprehendunt circulum o, sigillum pistilli, sigillum virgae, circulum Gray et sigillum gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}