33-99 No. Rua Mufu E, Distrito de Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Rua Mufu E, Distrito de Gulou, Nanjing, China [email protected] | [email protected]

Um cilindro hidráulico converte energia hidráulica em movimento mecânico retilíneo ou linear. Conectado a uma carga móvel, ele realiza trabalho.
Como introduzido em capítulos anteriores, um cilindro hidráulico é composto principalmente por um corpo cilíndrico, duas tampas fechadas nas extremidades, um pistão, uma haste de pistão e orifícios de entrada e saída. Cada extremidade possui um orifício — um para entrada de óleo e outro para saída de óleo.
figura 6-1: Cilindro hidráulico padrão de dupla ação. O óleo entra pela porta esquerda, fazendo com que a haste se estenda; o óleo que passa pela porta direita retrai-a.
Durante todo o curso do cilindro, a energia hidráulica atua sobre o pistão em movimento. A pressão gerada por essa energia hidráulica não excederá a resistência produzida pela carga. Para um cilindro de dimensões conhecidas, precisamos saber qual pressão de trabalho gera uma força de saída específica. Isso pode ser determinado (desprezando o atrito) com a fórmula:
Pressão = Força / Área
Ao utilizar esta fórmula, ou a área e a pressão são fornecidas para calcular a força de saída, ou a área e a força de saída são conhecidas para determinar a pressão. Na prática, normalmente conhecemos o diâmetro do cilindro e precisamos calcular a área do pistão — contudo, calcular a área de um círculo é tão simples quanto calcular a área de um quadrado.
A área de um círculo equivale aproximadamente a 78,54% da área de um quadrado cujo lado corresponde ao diâmetro do círculo. Mais precisamente:
Área do círculo = Diâmetro² × 0,7854
Outra fórmula comumente utilizada:
Área do círculo = π × D² ÷ 4

Figura 6-2 Área do círculo = D² × 0,7854. Esta fórmula simples é utilizada constantemente nos cálculos de cilindros hidráulicos.
A distância ao longo da qual a energia hidráulica atua determina a quantidade de trabalho realizado — essa distância é o curso do cilindro. Como observado anteriormente, utilizar a pressão hidráulica para amplificar uma força parece não ter custo algum. Em algumas situações específicas — quando o sistema está em estado estático — uma pequena força pode produzir uma força muito grande sem aparente sacrifício. Contudo, se essa força amplificada também provocar movimento, algo é sacrificado: a distância.
Todo cilindro hidráulico possui um volume (deslocamento) igual ao seu curso (em polegadas) multiplicado pela área do pistão (em polegadas quadradas), resultando em um volume expresso em polegadas cúbicas (cm³).
Volume do cilindro = Área do pistão × Curso
(pol³) = (pol²) × (pol) ou (cm³) = (cm²) × (cm)
Exemplo: O pistão superior deve se mover 2 in (5,08 cm) para que o pistão do cilindro inferior se mova 1 in (2,54 cm). Ambos os pistões realizam o mesmo trabalho. O pistão superior desloca 20 in³ (327,8 cm³) de fluido — e o pistão do cilindro inferior é deslocado por esse mesmo volume de 20 in³ (327,8 cm³) de fluido.
A velocidade da haste de um cilindro hidráulico depende da rapidez com que o fluido preenche a câmara atrás do pistão. Fórmulas para a velocidade da haste do pistão:
Velocidade da haste (in/min) = Vazão (gpm) × 231 ÷ Área do pistão (in²)
Velocidade da haste (m/s) = Vazão (Lpm) × 0,1667 ÷ Área do pistão (cm²)

Um motor hidráulico é um atuador que converte energia hidráulica em energia mecânica rotativa. Essa energia rotativa é aplicada à carga por meio do eixo de acionamento.
Todos os motores hidráulicos consistem essencialmente em uma carcaça com orifícios de entrada e saída, além de um conjunto rotativo conectado ao eixo de acionamento.
O exemplo mostrado é um motor hidráulico do tipo palheta. O conjunto rotativo consiste em um rotor e palhetas que podem deslizar livremente para dentro e para fora das ranhuras do rotor. O conjunto rotativo é montado de forma excêntrica dentro da carcaça; o eixo de acionamento conecta-se à carga. Quando o óleo sob pressão entra na câmara de entrada, a energia hidráulica atua sobre a face exposta das palhetas na câmara de entrada. Como a área da palheta superior exposta ao óleo sob pressão é maior, a força atuante sobre o rotor é desequilibrada — o rotor gira.
À medida que o óleo atinge a câmara de saída, cujo volume diminui, ele é descarregado.
Observação: Antes que este tipo de motor possa operar normalmente, as palhetas devem estar estendidas e devem apresentar uma vedação confiável com a carcaça. Diferentemente de uma bomba hidráulica, as palhetas não podem ser expulsas pela força centrífuga — o método de extensão das palhetas do motor será discutido em um capítulo posterior.
Figura 6-6 Funcionamento do motor de palhetas. O óleo sob pressão atua nas faces das palhetas. Como a área superior da palheta exposta à pressão é maior que a área inferior, a força resultante faz o rotor girar.
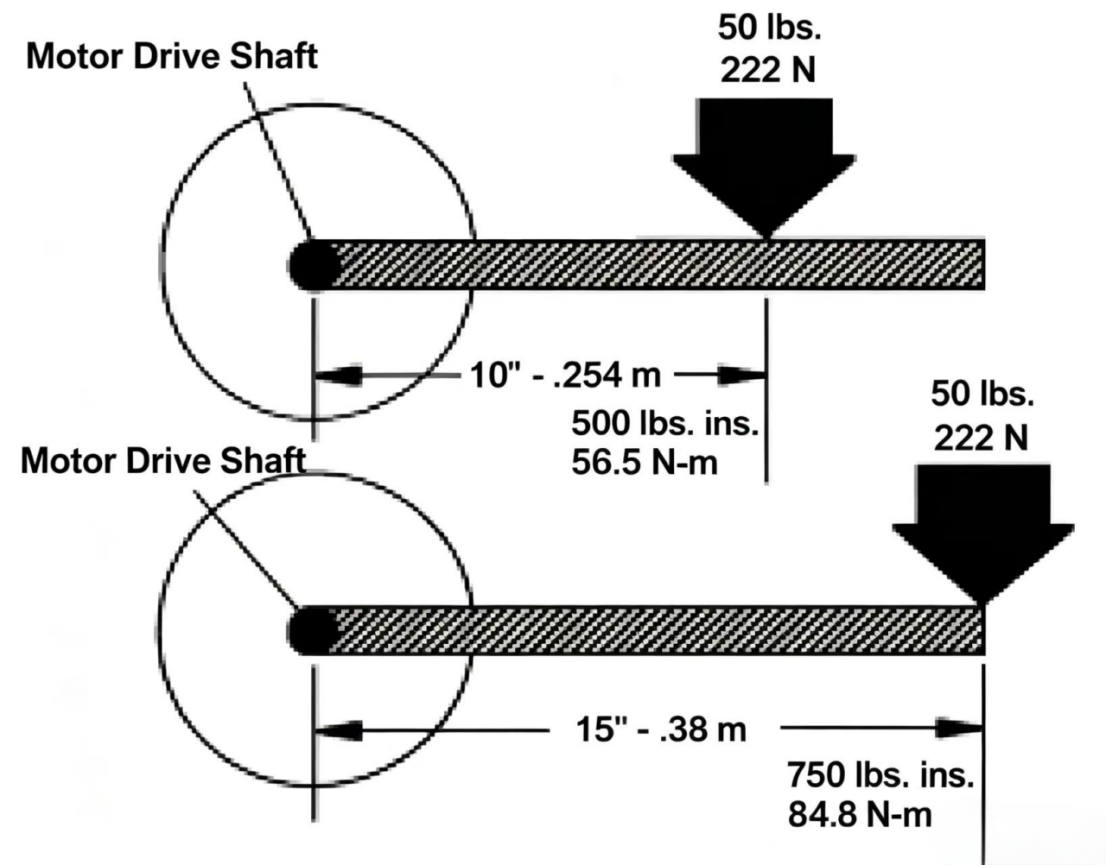
Torque é uma força rotacional ou de torção. Torque é uma força que atua a uma distância do eixo central de um eixo. A unidade de torque é lb.in. (ou Nm).
O torque indica-nos a posição da força em relação ao eixo central do motor hidráulico. A fórmula do torque é:
Torque = Força × Distância até o eixo central
(lb.in.) = (lb) × (pol.) ou (Nm) = (N) × (m)
Exemplo da figura: Uma força de 50 libras (222 N) atua sobre uma manivela conectada ao eixo do motor. A distância entre o centro do eixo e o ponto de aplicação da força é de 10 polegadas (0,254 m). O torque resultante no eixo é de 500 polegadas-libra (56,5 Nm). Se a mesma força de 50 libras (222 N) for aplicada sobre uma manivela de 15 polegadas (0,38 m), o torque no eixo será de 750 polegadas-libra (84,6 Nm). Quanto maior a distância entre o ponto de aplicação da força e o centro do eixo, maior será o torque. Observe que o torque não envolve qualquer movimento.
Uma carga conectada ao eixo de acionamento do motor gera torque conforme descrito acima. No caso do motor hidráulico, trata-se de uma resistência — que deve ser superada pela pressão hidráulica atuando sobre o conjunto rotativo do motor.
Torque (polegadas-libra) = psi × deslocamento do motor (pol³) ÷ (2 × π)
Torque (Nm) = bar × deslocamento do motor (cm³) ÷ (20 × π)
A velocidade do eixo do motor hidráulico é determinada pela velocidade com que o fluido é injetado. A fórmula é:
Velocidade do motor (rpm) = vazão (gpm) × 231 ÷ deslocamento do motor (pol³/rev)
Velocidade do motor (rpm) = Vazão (Lpm) × 1000 ÷ Deslocamento do motor (ml/rev)
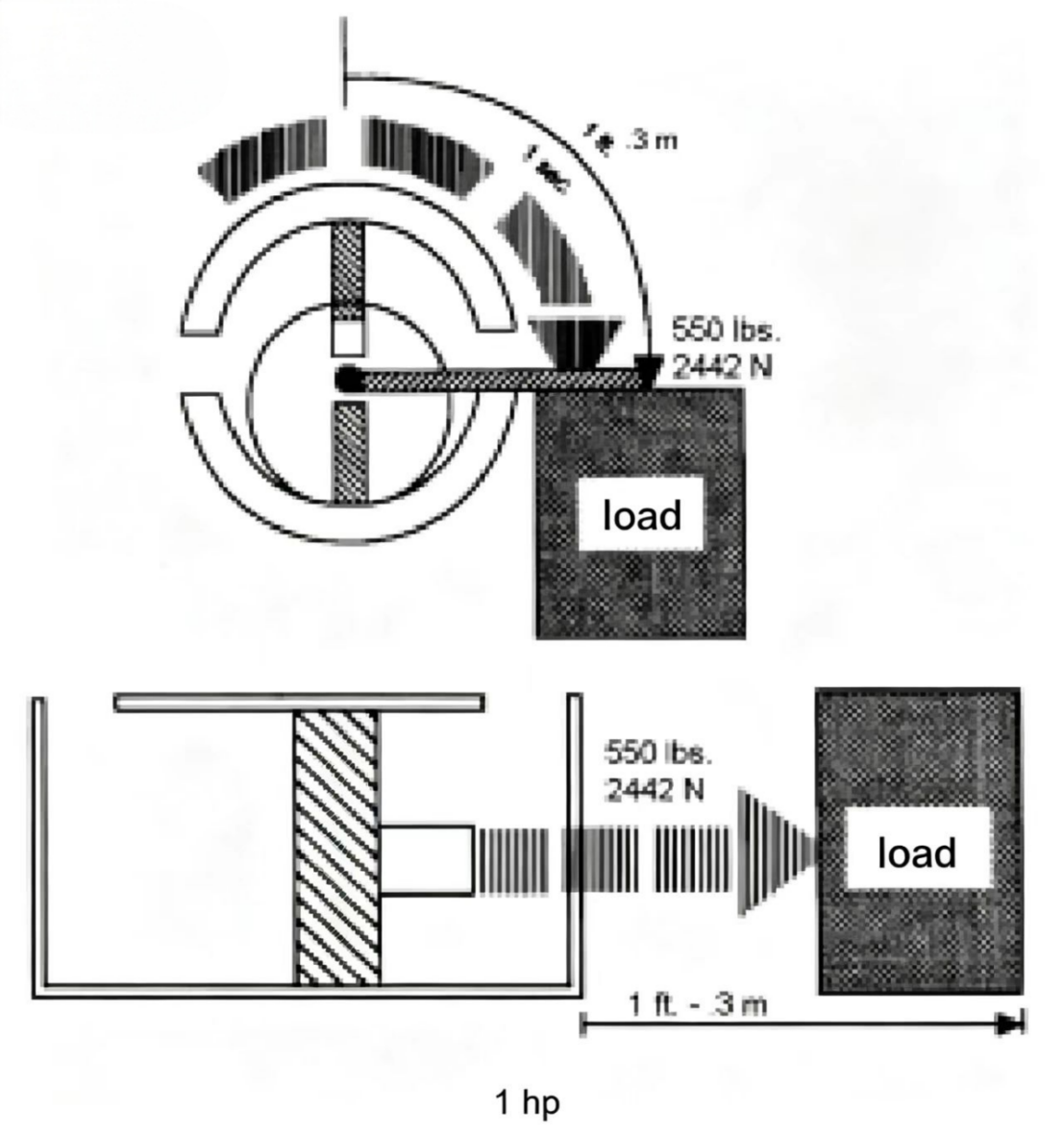
Nos capítulos anteriores, aprendemos que potência é a taxa na qual o trabalho é realizado, ou seja, hp = pés.libras/tempo ou W = J/tempo.
Também sabemos que cavalo-vapor (hp) ou watt (W) é a unidade de potência. Se um cilindro hidráulico ou um motor hidráulico acionar uma carga com uma força mecânica de 550 libras (2.442 N) e deslocá-la em 1 pé (0,30 m) em 1 segundo, terá consumido 1 hp (746 W) de potência. Se o mesmo trabalho (550 pés.libras / 746 J) for realizado em meio segundo, a velocidade de operação duplica e a potência será de 2 hp (1.490 W).
A potência mecânica transmitida por um cilindro ou motor a uma carga equivale à potência hidráulica exigida pelo cilindro ou motor. Para um sistema hidráulico que realiza trabalho à taxa de 550 pés.libras por segundo (746 J), sua potência hidráulica é de 1 cv (746 W). Contudo, na fórmula da potência mecânica, "pés (m)" e "libras (N)" são substituídos pelos termos hidráulicos "psi (bar)" e "gpm (L/min)". Um fator de conversão é utilizado nos cálculos de potência hidráulica para expressar a relação entre gpm, psi, pés e libras (ou L/min, bar, m e N).
Para calcular a potência de um cilindro hidráulico ou de todo o sistema hidráulico:
cv = gpm × psi × 0,000583
W = cv × 746
W = (5/3) × L/min × bar
Para calcular a potência de saída de um motor hidráulico:
cv = rpm × Torque (polegada.libras) ÷ 63.025
kW = rpm × Torque (Nm) ÷ 9.543
Até agora, discutimos motores hidráulicos com saída rotativa e cilindros hidráulicos com saída linear. Agora abordaremos outro tipo de atuador que produz rotação em ângulo limitado. Esse tipo é denominado cilindro oscilante ou motor oscilante. Sua estrutura é compacta, simples e eficiente — gera alto torque e requer apenas um pequeno espaço de instalação, com fácil montagem.
Atuadores oscilantes são utilizados para indexação de máquinas-ferramenta, operações de dobramento, elevação ou rotação de objetos pesados, inversão (flip), posicionamento, dispositivos de fixação para usinagem, controles náuticos, acionamento de válvulas, entre outros.
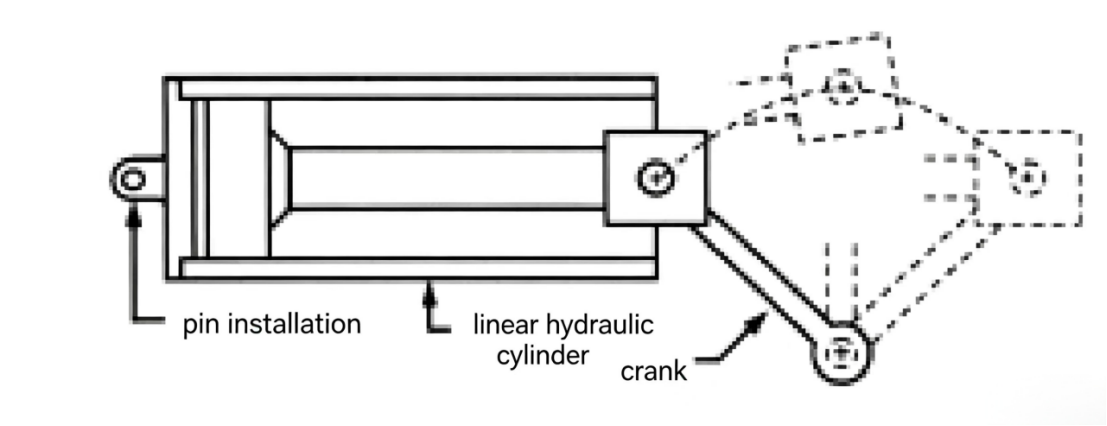
Existem diversos tipos de cilindros oscilantes. O mais simples é um mecanismo oscilante acionado por um cilindro hidráulico linear, no qual a extremidade do corpo do cilindro é montada com um pino e a haste do pistão se conecta a uma manivela que aciona um eixo para girar. Esse cilindro oscilante pode ser controlado por uma válvula direcional de quatro vias, com fim de curso comutadores (interruptores de fim de curso) em cada extremidade do deslocamento.
Como todos os dispositivos mecânicos, este atuador oscilante baseado em cilindro linear possui algumas características básicas, incluindo a possibilidade de ser montado com peças padrão prontamente disponíveis no mercado, conferindo aos projetistas grande flexibilidade e mantendo os custos baixos, com peças de reposição facilmente obtíveis.
No entanto, esse tipo de atuador oscilante também apresenta características indesejáveis: a haste do pistão não é protegida e entra em contato direto com o ambiente circundante, especialmente porque o mecanismo de manivela normalmente não é estanque, criando riscos à segurança. Além disso, o eixo de acionamento geralmente suporta grandes cargas laterais, causando falha prematura, desgaste excessivo e travamento.
Para esse tipo específico de atuador oscilante, o cilindro hidráulico deve ter liberdade para oscilar; portanto, é necessário utilizar conexões flexíveis por mangueiras, e, ao longo do curso do cilindro, o torque de saída não é constante.
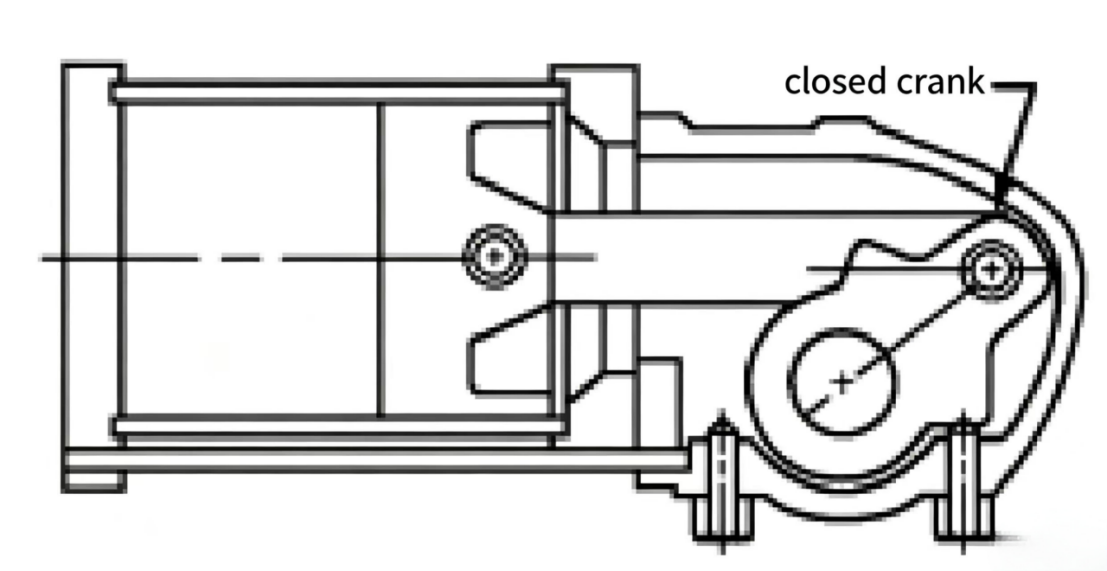
O cilindro oscilante fechado é muito semelhante ao mecanismo oscilante baseado em cilindro linear descrito acima. O cilindro fechado possui uma tampa de proteção que envolve a haste do pistão e a manivela. O eixo de acionamento normalmente dispõe de suporte adicional por meio de rolamentos para evitar cargas laterais excessivas. Esse tipo pode ser equipado com válvulas solenoides, fim de curso ou interruptores de curso. A faixa de curso geralmente pode ser ajustada entre aproximadamente 85° e 100°.
Outro tipo é o cilindro oscilante com retorno por mola, que utiliza um cilindro hidráulico com uma mola de retorno para levar o eixo de acionamento de volta à sua posição original. Os cilindros oscilantes com retorno por mola podem fornecer torques de até 5.000 in.lbs (565 Nm).

O cilindro oscilante mais comum é do tipo cremalheira-engrenagem. Esse tipo pode manter um torque de saída constante em ambas as direções durante toda a rotação completa. Nessa configuração, a pressão hidráulica atua sobre o pistão, empurrando a cremalheira conectada ao pistão, que aciona a engrenagem pinhão para girar o eixo. Os cilindros padrão do tipo cremalheira-engrenagem possuem cursos de rotação de 90°, 180°, 360° ou até maiores. Os torques de saída desses cilindros podem atingir 52.000.000 in.lbs (5.876.000 Nm).

Também está disponível um motor oscilante de palheta. Esse tipo pode ser de uma única palheta ou de múltiplas palhetas. Um motor de uma única palheta pode girar 280°; um motor de duas palhetas pode girar 200°. O torque de saída de um motor de duas palhetas é o dobro do de um motor de uma única palheta. Esse tipo de motor oscilante pode alcançar torques de saída de até 500.000 in.lbs (Nm).

Existe outro tipo de motor oscilante que gera torque utilizando um mecanismo de ranhura helicoidal. Alterações no comprimento e no passo da ranhura permitem variar o curso de rotação em uma ampla faixa. Esse tipo de motor oscilante possui um eixo com ranhura helicoidal e uma luva de pistão internamente ranhurada montada sobre o eixo — a rotação da luva de pistão é limitada por hastes-guia. Quando a luva de pistão se desloca dentro do cilindro, ela aciona o eixo ranhurado para girar. Os cursos de rotação padrão são 90°, 180°, 270° e 360°, com torques de saída de até 1.000.000 in.lbs (13.000 Nm).
Os motores oscilantes de corrente e engrenagem utilizam pistões, correntes e engrenagens para acionar o eixo. Esse atuador normalmente possui um pistão grande (como dispositivo de acionamento) para puxar a corrente e um pistão menor para evitar vazamentos de óleo pela rota de retorno da corrente. Os torques de saída podem atingir cerca de 23.000 in.lbs (2.599 Nm), e a rotação do eixo de acionamento pode alcançar cinco voltas completas ou 1.800°.
Para selecionar o cilindro oscilante mais adequado para uma aplicação específica, é necessário considerar o conjugado, a velocidade e o método de operação. Descreveremos a seleção prática de motores oscilantes em outro capítulo e discutiremos ainda como determinar se o atuador deve ser de simples ou dupla ação, se é necessário utilizar posicionamento em malha fechada, se é necessária amortecimento, etc. A frequência de operação ou o período do ciclo também serão analisados.
A velocidade do atuador é uma função da vazão (gpm ou L/min)
A velocidade linear da haste do pistão de um cilindro hidráulico depende da velocidade com que a bomba injeta fluido na câmara do pistão do cilindro (gpm ou L/min). A velocidade de rotação do eixo de saída de um motor hidráulico depende da vazão (gpm ou L/min) injetada no motor hidráulico.
A força de saída do atuador é uma função da pressão (psi ou bar)
A força de saída de um cilindro é expressa em psi (bar) — a força de saída no eixo de acionamento de um motor é determinada pela pressão atuando na área exposta do conjunto rotativo do motor. A potência gerada por um atuador é uma função da velocidade do atuador multiplicada pela sua força de saída.
Para cilindros, a força de saída é expressa em psi e a velocidade da haste do pistão em gpm. A constante 0,000583 descreve a relação entre psi, gpm e potência. Para motores, a força de saída é expressa em torque e a velocidade de operação do motor em rpm. A constante 63.025 descreve a relação entre rpm, torque e potência.

Bem-vindo à HOVOO, uma fábrica de selos chinesa. Produção de selos de PU, borracha e PTFE. Os selos incluem O-ring, selo de pistão, selo de haste, anel cinza e selo de gás.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}