33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]
33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]

Un cilindru hidraulic transformă energia hidraulică în mișcare mecanică rectilinie sau liniară. Conectat la o sarcină mobilă, efectuează lucru mecanic.
Așa cum s-a prezentat în capitolele anterioare, un cilindru hidraulic este compus, în principal, dintr-un corp cilindric, două capete închise, un piston, o tijă de piston și orificii de intrare și ieșire. Fiecare capăt are câte un orificiu — unul pentru uleiul de intrare, celălalt pentru uleiul de ieșire.
figura 6-1: Cilindru hidraulic standard cu acțiune dublă. Uleiul pătrunde prin orificiul din stânga, determinând întinderea tijei; uleiul care pătrunde prin orificiul din dreapta îl retrage.
Pe tot parcursul cursei cilindrului, energia hidraulică acționează asupra pistonului în mișcare. Presiunea generată de această energie hidraulică nu va depăși rezistența produsă de sarcină. Pentru un cilindru cu dimensiuni cunoscute, trebuie să determinăm ce presiune de lucru generează o forță de ieșire specifică. Aceasta poate fi calculată (neglijând frecarea) cu formula:
Presiune = Forță ÷ Suprafață
Când se utilizează această formulă, fie suprafața și presiunea sunt date pentru a determina forța de ieșire, fie suprafața și forța de ieșire sunt cunoscute pentru a determina presiunea. În practică, de obicei cunoaștem diametrul alezajului cilindrului și trebuie să calculăm suprafața pistonului — dar calculul suprafeței unui cerc este la fel de simplu ca și calculul suprafeței unui pătrat.
Suprafața unui cerc este aproximativ 78,54 % din suprafața unui pătrat al cărui latură este egală cu diametrul cercului. Mai precis:
Suprafața cercului = Diametrul² × 0,7854
O altă formulă utilizată frecvent:
Suprafața cercului = π × D² / 4

Figura 6-2 Aria cercului = D² × 0,7854. Această formulă simplă este utilizată în mod constant în calculele privind cilindrii hidraulici.
Distanța pe care acționează energia hidraulică determină cantitatea de lucru efectuat — această distanță este cursa cilindrului. Așa cum s-a menționat anterior, folosirea presiunii hidraulice pentru amplificarea unei forțe pare să nu coste nimic. În anumite situații specifice — când sistemul este în stare statică — o forță mică poate genera o forță foarte mare fără niciun sacrificiu aparent. Totuși, dacă această forță amplificată determină și o mișcare, se face un sacrificiu: distanța.
Fiecare cilindru hidraulic are un volum (deplasare) egal cu cursa sa (în inch) înmulțită cu aria pistonului (în inch²), rezultând un volum exprimat în inch³ (cm³).
Volumul cilindrului = Aria pistonului × Cursa
(inch³) = (inch²) × (inch) sau (cm³) = (cm²) × (cm)
Exemplu: Pistonul superior trebuie să se deplaseze cu 2 in (5,08 cm) pentru ca pistonul cilindrului inferior să se deplaseze cu 1 in (2,54 cm). Ambii pistoni efectuează același lucru mecanic. Pistonul superior deplasează 20 in³ (327,8 cm³) de fluid — iar pistonul cilindrului inferior este deplasat de aceeași cantitate de 20 in³ (327,8 cm³) de fluid.
Viteza tijei pistonului unui cilindru hidraulic depinde de viteza cu care fluidul umple camera din spatele pistonului. Formule pentru viteza tijei pistonului:
Viteză tijă (in/min) = Debit (gpm) × 231 / Suprafața pistonului (in²)
Viteză tijă (m/s) = Debit (Lpm) × 0,1667 / Suprafața pistonului (cm²)

Un motor hidraulic este un element de execuție care transformă energia hidraulică în energie mecanică de rotație. Această energie de rotație este transmisă unei sarcini prin intermediul arborelui de antrenare.
Toate motoarele hidraulice constau, în esență, dintr-o carcasă cu racorduri de intrare și ieșire și o asamblare rotativă conectată la arborele de antrenare.
Exemplul prezentat este un motor hidraulic de tip paletă. Asamblul rotitor constă dintr-un rotor și palete care pot aluneca liber în interiorul și în exteriorul crestăturilor rotorului. Asamblul rotitor este montat excentric în interiorul carcasei; arborele de antrenare se conectează la sarcină. Când uleiul sub presiune pătrunde în camera de intrare, energia hidraulică acționează asupra feței expuse a paletei din camera de intrare. Deoarece suprafața paletei superioare expusă uleiului sub presiune este mai mare, forța exercitată asupra rotorului este neechilibrată — rotorul se rotește.
Pe măsură ce uleiul ajunge în camera de ieșire, unde volumul scade, este evacuat.
Notă: Înainte ca acest tip de motor să poată funcționa normal, paletele trebuie să fie extinse și să asigure o etanșare fiabilă cu carcasa. Spre deosebire de o pompă hidraulică, paletele nu pot fi împinse spre exterior prin forța centrifugă — metoda de extindere a paletelor motorului va fi abordată într-un capitol ulterior.
Figura 6-6 Funcționarea motorului cu palete. Uleiul sub presiune acționează asupra fețelor paletelor. Deoarece suprafața superioară a paletei expusă presiunii este mai mare decât suprafața inferioară a paletei, forța rezultantă rotește rotorul.
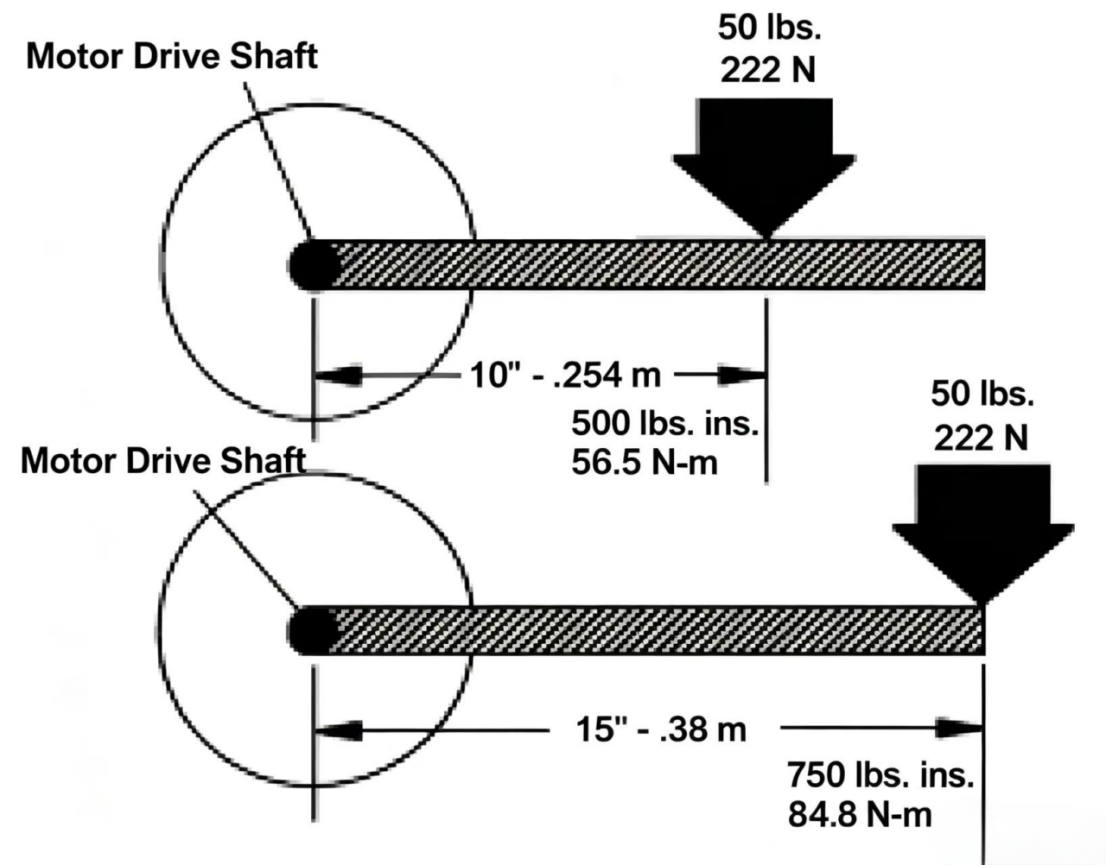
Momentul de torsiune este o forță de rotație sau de răsucire. Momentul de torsiune este o forță care acționează la o distanță față de axa centrală a arborelui. Unitatea de măsură pentru momentul de torsiune este lb·in. (sau N·m).
Momentul de torsiune ne indică poziția forței relativ la axa centrală a arborelui motorului hidraulic. Formula momentului de torsiune este:
Momentul de torsiune = Forța × Distanța față de axa arborelui
(lb·in.) = (lb) × (in.) sau (N·m) = (N) × (m)
Exemplu din figură: O forță de 50 lbs (222 N) acționează asupra unei manivele conectate la arborele motorului. Distanța dintre centrul arborelui și punctul de aplicație al forței este de 10 in. (0,254 m). Cuplul rezultant aplicat arborelui este de 500 in·lbs (56,5 Nm). Dacă aceeași forță de 50 lbs (222 N) acționează de-a lungul unei manivele de 15 in. (0,38 m), cuplul aplicat arborelui este de 750 in·lbs (84,6 Nm). Cu cât forța acționează mai departe de centrul arborelui, cu atât cuplul este mai mare. Se observă că cuplul nu implică nicio mișcare.
O sarcină conectată la arborele de antrenare al motorului generează cuplu, așa cum este descris mai sus. În cazul motorului hidraulic, aceasta reprezintă o rezistență — care trebuie învinsă prin presiunea hidraulică ce acționează asupra ansamblului rotitor al motorului.
Cuplu (in·lbs) = psi × deplasarea motorului (in³) / (2 × π)
Cuplu (Nm) = bar × deplasarea motorului (cm³) / (20 × π)
Turația arborelui motorului hidraulic este determinată de viteza cu care fluidul este injectat. Formula este:
Turația motorului (rpm) = debitul volumetric (gpm) × 231 / deplasarea motorului (in³/rot)
Turația motorului (rpm) = Debitul (L/min) × 1000 / Capacitatea cilindrică a motorului (ml/rot)
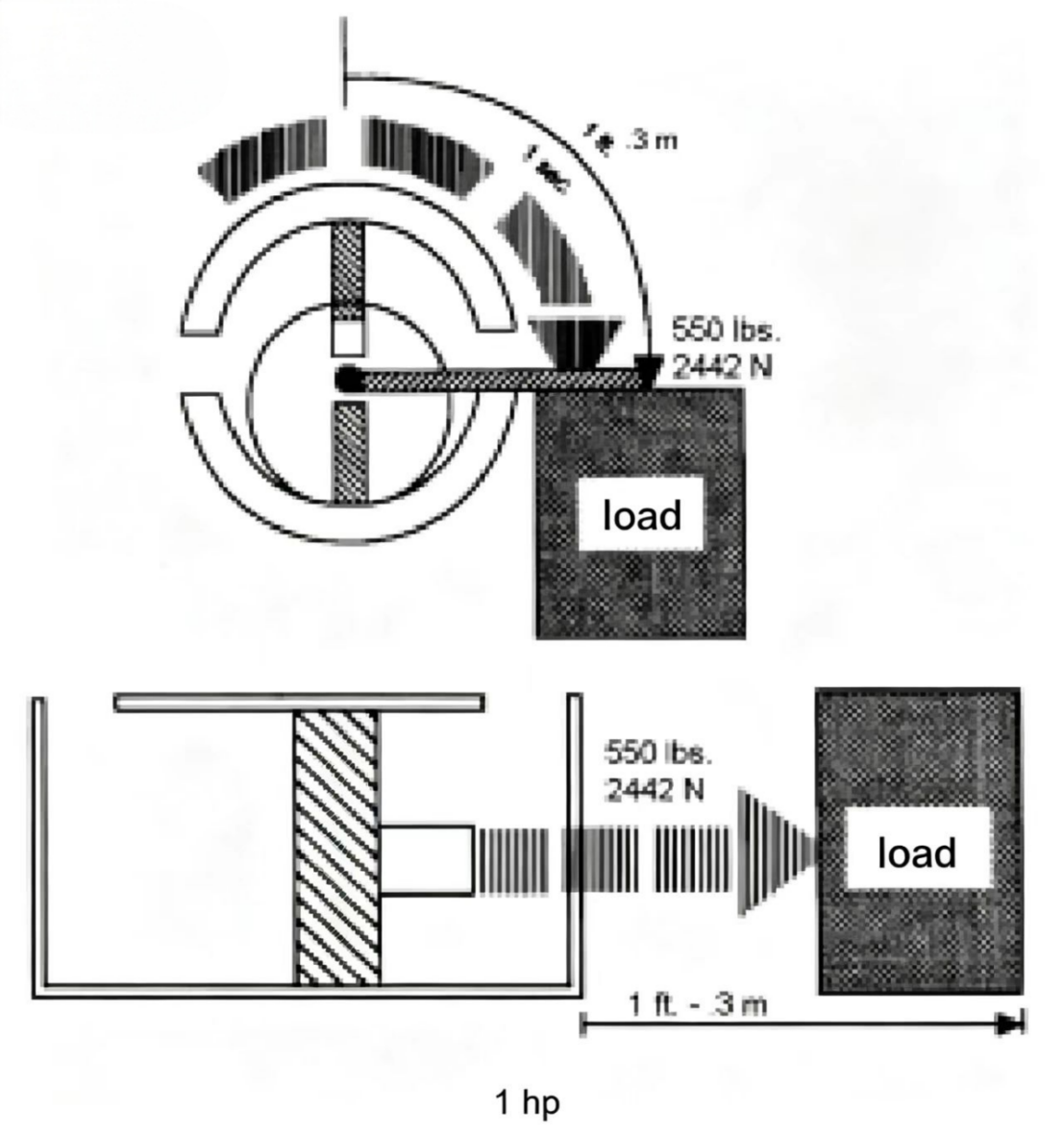
În capitolele anterioare am învățat că puterea este viteza la care se efectuează un lucru mecanic, adică cp = ft·lbf/timp sau W = J/timp.
Știm, de asemenea, că calul-putere (cp) sau watt-ul (W) este unitatea de măsură a puterii. Dacă un cilindru hidraulic sau un motor hidraulic antrenează o sarcină cu o forță mecanică de 550 lbf (2.442 N) și o deplasează cu 1 ft (0,30 m) într-o secundă, atunci s-a consumat o putere de 1 cp (746 W). Dacă același lucru mecanic (550 ft·lbf / 746 J) se efectuează în jumătate de secundă, viteza de lucru se dublează și puterea devine 2 cp (1.490 W).
Puterea mecanică transmisă de un cilindru sau motor către o sarcină este egală cu puterea hidraulică necesară cilindrului sau motorului. Pentru un sistem hidraulic care efectuează lucru mecanic cu o rată de 550 ft·lb pe secundă (746 J), puterea sa hidraulică este de 1 CP (746 W). Totuși, în formula puterii mecanice, „ft (m)” și „lb (N)” sunt înlocuite de termenii hidraulici „psi (bar)” și „gpm (L/min)”. În calculele de putere hidraulică se utilizează un factor de conversie pentru a exprima relația dintre gpm, psi, ft și lb (sau L/min, bar, m și N).
Pentru a calcula puterea unui cilindru hidraulic sau a întregului sistem hidraulic:
cP = gpm × psi × 0,000583
W = CP × 746
W = (5/3) × L/min × bar
Pentru a calcula puterea de ieșire a unui motor hidraulic:
cP = rpm × Cuplu (lb·in) / 63.025
kW = rpm × Cuplu (Nm) / 9.543
Până acum am discutat despre motoare hidraulice cu ieșire rotativă și cilindri hidraulici cu ieșire liniară. Acum vom analiza un alt tip de actionator care produce o rotație cu unghi limitat. Acest tip este denumit cilindru oscilant sau motor oscilant. Structura sa este compactă, simplă și eficientă — generează un cuplu ridicat și necesită doar un spațiu redus de instalare, fiind ușor de montat.
Actionatoarele oscilante sunt utilizate pentru indexarea mașinilor-unelte, operațiunile de îndoire, ridicarea sau rotirea obiectelor grele, întoarcerea, poziționarea, dispozitivele de fixare pentru prelucrare, comenzi nautice, acționarea robineților etc.
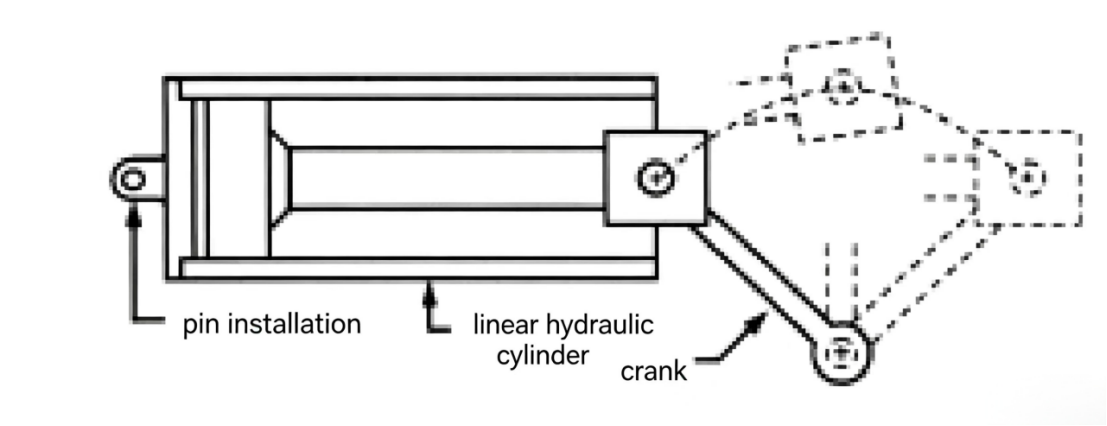
Există multe tipuri de cilindri oscilanți. Cel mai simplu este un mecanism oscilant acționat de un cilindru hidraulic liniar, la capătul carcasei căruia este montată o axă pivotantă, iar tija pistonului se conectează la o manivelă care antrenează un arbore în rotație. Acest cilindru oscilant poate fi comandat cu ajutorul unei supape direcționale cu patru căi, cu întrerupătoare de limită la fiecare capăt al cursei.
Ca și toate dispozitivele mecanice, acest actuator oscilant bazat pe cilindru liniar are unele caracteristici de bază, printre care faptul că poate fi asamblat din componente standard, disponibile pe piață, oferind astfel proiectanților o mare flexibilitate și menținând costurile reduse datorită pieselor de schimb ușor de obținut.
Totuși, acest tip de actuator oscilant prezintă și caracteristici nedorite: tija pistonului nu este protejată și intră în contact direct cu mediul înconjurător, mai ales deoarece mecanismul manivelă nu este, în general, etanșat, ceea ce creează riscuri pentru siguranță. De asemenea, arborele de antrenare suportă, de obicei, sarcini laterale mari, provocând defecțiuni premature, uzură excesivă și blocare.
Pentru acest tip specific de actuator oscilant, cilindrul hidraulic trebuie să fie liber să oscileze, deci trebuie să utilizeze racorduri flexibile din furtun, iar pe întreaga cursă a cilindrului cuplul de ieșire nu este constant.
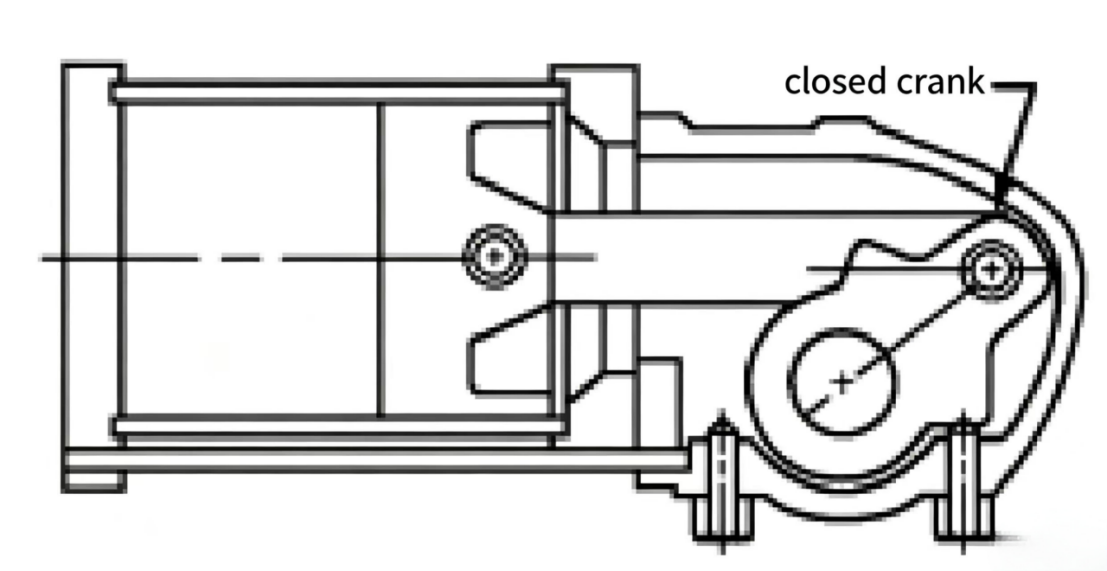
Cilindrul oscilant închis este foarte asemănător cu mecanismul oscilant bazat pe cilindru liniar descris mai sus. Cilindrul închis are o carcasă de protecție care acoperă tija pistonului și manivela. Arborele de antrenare are, de obicei, suporturi suplimentare cu rulmenți pentru a preveni încărcările laterale severe. Acest tip poate fi echipat cu electrovalve, contacte finale sau contacte de cursă. Intervalul de cursă poate fi, de obicei, reglat între aproximativ 85° și 100°.
Un alt tip este cilindrul oscilant cu revenire prin arc, care utilizează un cilindru hidraulic cu arc de revenire pentru a readuce arborele de antrenare în poziția sa inițială. Cilindrii oscilanți cu revenire prin arc pot genera cupluri până la 5.000 in.lbs (565 Nm).

Cel mai frecvent tip de cilindru oscilant este cel cu cremalieră și pinion. Acest tip poate menține un cuplu de ieșire constant în ambele sensuri pe întreaga rotație. În această configurație, presiunea hidraulică acționează asupra pistonului, împingând cremaliera conectată la piston, care, la rândul său, antrenează roata dințată pinion pentru a roti arborele. Cilindrii standard cu cremalieră și pinion au curse de rotație de 90°, 180°, 360° sau chiar mai mari. Cuplurile de ieșire ale cilindrilor cu cremalieră și pinion pot atinge 52.000.000 in.lbs (5.876.000 Nm).

Este disponibil și un motor oscilant cu paletă. Acest tip poate fi cu o singură paletă sau cu mai multe palete. Un motor cu o singură paletă poate efectua o rotație de 280°; un motor cu două palete poate efectua o rotație de 200°. Cuplul de ieșire al motorului cu două palete este de două ori mai mare decât cel al motorului cu o singură paletă. Acest tip de motor oscilant poate atinge cupluri de ieșire până la 500.000 in.lbs (Nm).

Există un alt tip de motor oscilant care generează cuplu folosind un mecanism cu caneluri elicoidale. Modificările lungimii și pasului canelurilor permit variația cursei de rotație pe o gamă largă. Acest tip de motor oscilant are un arbore cu caneluri elicoidale și o manșetă de piston canelată interior pe arbore — rotația manșetei de piston este limitată de tije ghid. Când manșeta de piston se deplasează în interiorul cilindrului, aceasta antrenează arborele cu caneluri în rotație. Cursele standard de rotație sunt de 90°, 180°, 270° și 360°, iar cuplurile de ieșire pot atinge până la 1.000.000 in.lbs (13.000 Nm).
Motoarele oscilante cu lanț și roată dințată folosesc pistoane, lanțuri și roți dințate pentru a antrena arborele. Acest actuator are, de obicei, un piston mare (ca dispozitiv de acționare) care trage lanțul și un piston mic care previne scurgerea uleiului prin traseul de întoarcere al lanțului. Cuplurile de ieșire pot atinge aproximativ 23.000 in.lbs (2.599 Nm), iar rotația arborelui de acționare poate ajunge la cinci rotații complete sau 1.800°.
Pentru selectarea cilindrului oscilant cel mai potrivit pentru o aplicație specifică, sunt implicate potrivirea cuplului, a vitezei și a metodei de funcționare. Vom descrie selecția efectivă a motoarelor oscilante într-un alt capitol și vom analiza în continuare modul de determinare a tipului de acționare (simplă sau dublă), dacă este necesară poziționarea în buclă închisă, dacă este necesară amortizarea etc. Vom examina, de asemenea, frecvența de funcționare sau perioada unui ciclu.
Viteza acționatorului este o funcție a debitului (gpm (L/min))
Viteza liniară a tijei pistonului unui cilindru hidraulic depinde de viteza cu care pompa injectează fluid în camera pistonului cilindrului (gpm (L/min)). Viteza de rotație a arborelui unui motor hidraulic depinde de debitul (gpm (L/min)) injectat în motorul hidraulic.
Forța de ieșire a acționatorului este o funcție a presiunii (psi (bar))
Forța de ieșire a unui cilindru este exprimată în psi (bar) — forța de ieșire pe arborele de antrenare al unui motor este determinată de presiunea care acționează asupra ariei expuse a ansamblului rotitor al motorului. Puterea produsă de un actionator este o funcție a vitezei actionatorului înmulțită cu forța de ieșire a actionatorului.
Pentru cilindri, forța de ieșire este exprimată în psi, iar viteza tijei pistonului în gpm. Constanta 0,000583 descrie relația dintre psi, gpm și putere. Pentru motoare, forța de ieșire este exprimată în cuplu, iar viteza de funcționare a motorului în rpm. Constanta 63.025 descrie relația dintre rpm, cuplu și putere.

Bine aţi venit la Hovoo, o fabrică chineză de sigilii. Producerea sigiliilor PU, cauciuc şi PTFE. Sigiliile includ inelul O, sigiliul de piston, sigiliul de bară, inelul gri şi sigiliul de gaz.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}