33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]
33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]

กระบอกสูบไฮดรอลิกแปลงพลังงานไฮดรอลิกให้เป็นการเคลื่อนที่เชิงกลแบบเส้นตรงหรือแบบเชิงเส้น เมื่อเชื่อมต่อกับภาระที่สามารถเคลื่อนที่ได้ มันจะทำหน้าที่สร้างงาน
ดังที่ได้กล่าวไว้ในบทก่อนหน้า กระบอกสูบไฮดรอลิกประกอบด้วยส่วนสำคัญหลัก ๆ ได้แก่ ทรงกระบอก (บาร์เรล), ฝาปิดปลายทั้งสองข้างที่ปิดสนิท, ลูกสูบ, แท่งลูกสูบ และช่องรับ-ส่งของเหลว แต่ละปลายมีช่องหนึ่งช่อง — หนึ่งช่องสำหรับน้ำมันเข้า อีกช่องหนึ่งสำหรับน้ำมันออก
รูปที่ 6-1 แสดงกระบอกสูบไฮดรอลิกแบบสองทิศทางมาตรฐาน น้ำมันไหลเข้าทางช่องด้านซ้าย ทำให้ก้านลูกสูบยืดออก; ในขณะที่น้ำมันไหลผ่านช่องด้านขวาจะทำให้ก้านลูกสูบหดกลับ
ตลอดช่วงการเคลื่อนที่ของลูกสูบในกระบอกสูบ พลังงานไฮดรอลิกจะกระทำต่อลูกสูบที่กำลังเคลื่อนที่ ความดันที่เกิดจากพลังงานไฮดรอลิกนั้นจะไม่เกินแรงต้านที่เกิดจากภาระที่รับอยู่ สำหรับกระบอกสูบที่มีขนาดทราบค่าแล้ว เราจำเป็นต้องทราบว่าความดันในการทำงานระดับใดจะสร้างแรงผลลัพธ์เฉพาะเจาะจง ซึ่งสามารถคำนวณได้ (โดยไม่พิจารณาแรงเสียดทาน) ด้วยสูตรต่อไปนี้:
ความดัน = แรง ÷ พื้นที่
เมื่อใช้สูตรนี้ อาจกำหนดค่าพื้นที่และแรงดันมาเพื่อหาแรงผลลัพธ์ หรือกำหนดค่าพื้นที่และแรงผลลัพธ์มาเพื่อหาแรงดันก็ได้ ในทางปฏิบัติ มักทราบค่าเส้นผ่านศูนย์กลางของกระบอกสูบ (bore diameter) และต้องคำนวณหาพื้นที่หน้าตัดของลูกสูบ — แต่การคำนวณพื้นที่วงกลมนั้นก็ง่ายไม่ต่างจากการคำนวณพื้นที่สี่เหลี่ยมจัตุรัส
พื้นที่วงกลมมีค่าประมาณร้อยละ 78.54 ของพื้นที่สี่เหลี่ยมจัตุรัส ซึ่งด้านแต่ละด้านมีความยาวเท่ากับเส้นผ่านศูนย์กลางของวงกลมนั้น อย่างแม่นยำยิ่งขึ้น:
พื้นที่วงกลม = (เส้นผ่านศูนย์กลาง)^2 × 0.7854
อีกสูตรหนึ่งที่ใช้กันทั่วไป:
พื้นที่วงกลม = π × D^2 ÷ 4

รูปที่ 6-2 พื้นที่วงกลม = D² × 0.7854 สูตรง่ายๆ นี้ใช้บ่อยมากในการคำนวณกระบอกสูบไฮดรอลิก
ระยะทางที่พลังงานไฮดรอลิกกระทำจะกำหนดปริมาณงานที่ทำได้ — ระยะทางนี้คือระยะชักของกระบอกสูบ (cylinder stroke) ดังที่กล่าวมาแล้วก่อนหน้านี้ การใช้ความดันไฮดรอลิกเพื่อขยายแรงดูเหมือนจะไม่ต้องเสียค่าใช้จ่ายใดๆ แต่ในบางสถานการณ์เฉพาะ—เมื่อระบบอยู่ในภาวะสถิต (static)—แรงขนาดเล็กสามารถสร้างแรงขนาดใหญ่มากได้โดยไม่มีการสูญเสียที่เห็นได้ชัด อย่างไรก็ตาม หากแรงที่ถูกขยายออกนี้ยังก่อให้เกิดการเคลื่อนที่ด้วย จะมีสิ่งหนึ่งที่ต้องสูญเสียไป นั่นคือ ระยะทาง
กระบอกสูบไฮดรอลิกทุกตัวมีปริมาตร (displacement) เท่ากับระยะชัก (หน่วยนิ้ว) คูณด้วยพื้นที่ผิวของลูกสูบ (หน่วยตารางนิ้ว) ซึ่งให้ผลลัพธ์เป็นปริมาตรหน่วยลูกบาศก์นิ้ว (in³) หรือลูกบาศก์เซนติเมตร (cm³)
ปริมาตรของกระบอกสูบ = พื้นที่ผิวของลูกสูบ × ระยะชัก
(in³) = (in²) × (in) หรือ (cm³) = (cm²) × (cm)
ตัวอย่าง: ลูกสูบด้านบนต้องเคลื่อนที่ 2 นิ้ว (5.08 ซม.) เพื่อให้ลูกสูบของกระบอกสูบด้านล่างเคลื่อนที่ 1 นิ้ว (2.54 ซม.) ลูกสูบทั้งสองตัวทำงานเท่ากัน ลูกสูบด้านบนขับของไหลปริมาตร 20 ลูกบาศก์นิ้ว (327.8 ลูกบาศก์ซม.) — และลูกสูบของกระบอกสูบด้านล่างก็ถูกขับโดยของไหลปริมาตรเท่ากันนี้คือ 20 ลูกบาศก์นิ้ว (327.8 ลูกบาศก์ซม.)
ความเร็วของก้านลูกสูบของกระบอกสูบไฮดรอลิกขึ้นอยู่กับอัตราการไหลของของไหลเข้าสู่ห้องด้านหลังลูกสูบ สูตรคำนวณความเร็วของก้านลูกสูบ:
ความเร็วก้านลูกสูบ (นิ้ว/นาที) = อัตราการไหล (แกลลอนต่อนาที) × 231 ÷ พื้นที่หน้าตัดลูกสูบ (ตารางนิ้ว)
ความเร็วก้านลูกสูบ (เมตร/วินาที) = อัตราการไหล (ลิตรต่อนาที) × 0.1667 ÷ พื้นที่หน้าตัดลูกสูบ (ตารางเซนติเมตร)

มอเตอร์ไฮดรอลิกคือแอคทูเอเตอร์ที่เปลี่ยนพลังงานไฮดรอลิกให้เป็นพลังงานกลแบบหมุน ซึ่งพลังงานหมุนนี้จะถูกส่งไปยังโหลดผ่านเพลาขับ
มอเตอร์ไฮดรอลิกทั้งหมดประกอบด้วยปลอกหุ้มที่มีช่องรับและช่องจ่ายของไหล รวมทั้งชุดหมุนที่เชื่อมต่อกับเพลาขับ
ตัวอย่างที่แสดงคือมอเตอร์ไฮดรอลิกแบบใบพัด (vane-type hydraulic motor) ชุดหมุนประกอบด้วยโรเตอร์และใบพัดซึ่งสามารถเลื่อนเข้า-ออกได้อย่างอิสระจากช่องร่องบนโรเตอร์ ชุดหมุนถูกติดตั้งไว้แบบไม่กึ่งกลาง (eccentrically) ภายในตัวเรือน โดยเพลาขับเชื่อมต่อกับโหลด เมื่อน้ำมันความดันไหลเข้าสู่ห้องรับน้ำมัน (inlet chamber) พลังงานไฮดรอลิกจะกระทำต่อด้านที่เปิดเผยของใบพัดในห้องรับน้ำมัน เนื่องจากพื้นที่ผิวด้านบนของใบพัดที่สัมผัสกับน้ำมันความดันมีขนาดใหญ่กว่า แรงที่กระทำต่อโรเตอร์จึงไม่สมดุล — ส่งผลให้โรเตอร์หมุน
เมื่อน้ำมันไหลถึงห้องปล่อยน้ำมัน (outlet chamber) ซึ่งมีปริมาตรลดลง น้ำมันจะถูกปล่อยออกมา
หมายเหตุ: ก่อนที่มอเตอร์ชนิดนี้จะสามารถทำงานได้ตามปกติ ใบพัดจำเป็นต้องยื่นออกอย่างเต็มที่ และต้องมีการปิดผนึกอย่างเชื่อถือได้กับตัวเรือน ต่างจากปั๊มไฮดรอลิก ใบพัดไม่สามารถถูกดันออกโดยแรงหนีศูนย์กลางได้ — วิธีการยื่นใบพัดของมอเตอร์จะกล่าวถึงในบทต่อไป
รูปที่ 6-6 การทำงานของมอเตอร์แบบใบพัด (Vane motor) น้ำมันความดันทำแรงต่อพื้นผิวของใบพัด เนื่องจากพื้นที่ใบพัดส่วนบนที่สัมผัสกับความดันมีขนาดใหญ่กว่าพื้นที่ใบพัดส่วนล่าง แรงลัพธ์จึงทำให้โรเตอร์หมุน
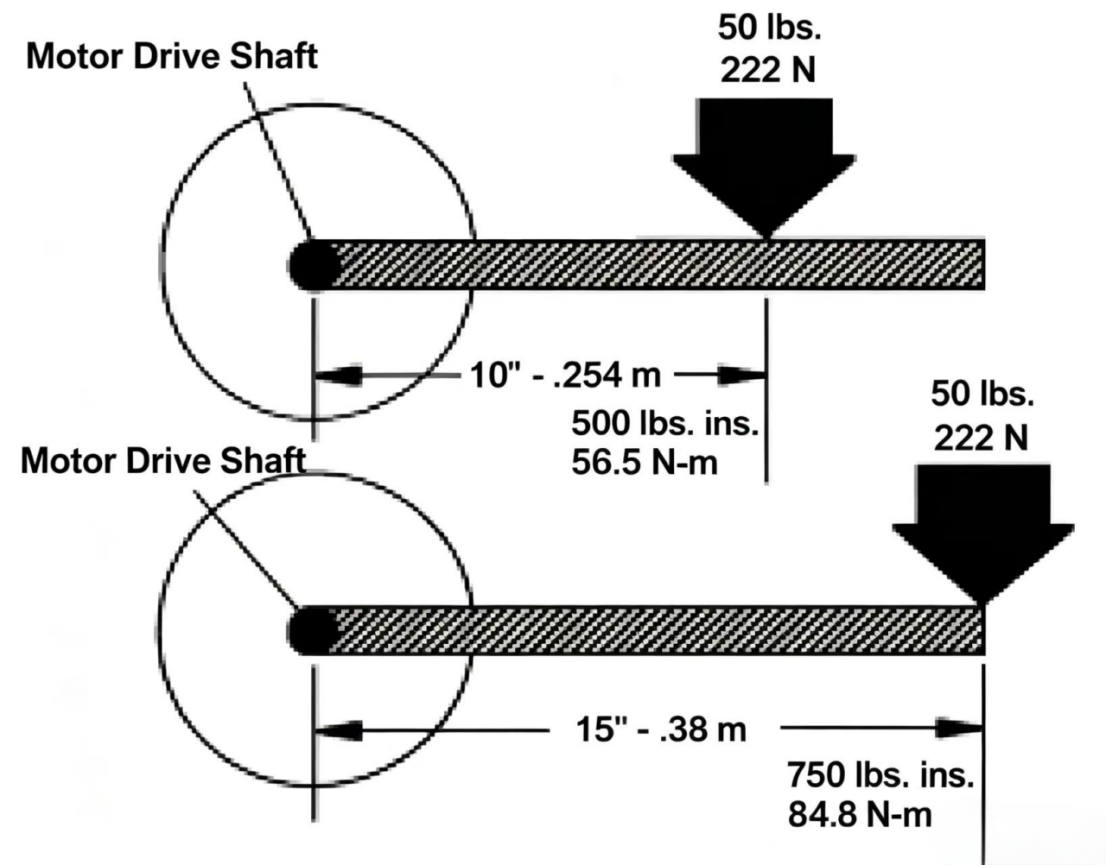
โมเมนต์บิด (Torque) คือแรงที่ทำให้เกิดการหมุนหรือการบิด โมเมนต์บิดคือแรงที่กระทำที่ระยะห่างจากเส้นศูนย์กลางของเพลา โดยหน่วยวัดโมเมนต์บิดคือปอนด์-นิ้ว (lb.in.) หรือ นิวตัน-เมตร (Nm)
โมเมนต์บิดบ่งบอกตำแหน่งของแรงเทียบกับเส้นศูนย์กลางของเพลามอเตอร์ไฮดรอลิก สูตรคำนวณโมเมนต์บิดคือ:
โมเมนต์บิด = แรง × ระยะห่างจากศูนย์กลางเพลา
(lb.in.) = (lbs) × (in.) หรือ (Nm) = (N) × (m)
ตัวอย่างจากภาพ: แรงขนาด 50 ปอนด์ (222 นิวตัน) กระทำต่อก้านข้อเหวี่ยงที่เชื่อมต่อกับเพลาของมอเตอร์ ระยะห่างระหว่างศูนย์กลางของเพลาและจุดที่แรงกระทำคือ 10 นิ้ว (0.254 เมตร) โมเมนต์บิดที่เกิดขึ้นบนเพลาคือ 500 นิ้ว-ปอนด์ (56.5 นิวตัน-เมตร) หากแรง 50 ปอนด์ (222 นิวตัน) เดียวกันนี้กระทำต่อก้านข้อเหวี่ยงที่ยาว 15 นิ้ว (0.38 เมตร) โมเมนต์บิดที่เกิดขึ้นบนเพลาจะเป็น 750 นิ้ว-ปอนด์ (84.6 นิวตัน-เมตร) ยิ่งแรงกระทำไกลจากศูนย์กลางของเพลามากเท่าใด โมเมนต์บิดก็จะยิ่งมากขึ้นเท่านั้น โปรดสังเกตว่าโมเมนต์บิดไม่เกี่ยวข้องกับการเคลื่อนที่แต่อย่างใด
โหลดที่เชื่อมต่อกับเพลาขับของมอเตอร์จะสร้างโมเมนต์บิดตามที่อธิบายข้างต้น ส่วนมอเตอร์ไฮดรอลิกนั้น โหลดนี้คือความต้านทาน ซึ่งจำเป็นต้องเอาชนะด้วยแรงดันไฮดรอลิกที่กระทำต่อชุดหมุนของมอเตอร์
โมเมนต์บิด (นิ้ว-ปอนด์) = psi × การเปลี่ยนปริมาตรของมอเตอร์ (ลูกบาศก์นิ้ว) ÷ (2 × π)
โมเมนต์บิด (นิวตัน-เมตร) = bar × การเปลี่ยนปริมาตรของมอเตอร์ (ลูกบาศก์เซนติเมตร) ÷ (20 × π)
ความเร็วของเพลาของมอเตอร์ไฮดรอลิกขึ้นอยู่กับอัตราการไหลของของเหลวที่ฉีดเข้าไป สูตรคือ:
ความเร็วของมอเตอร์ (รอบต่อนาที) = อัตราการไหล (แกลลอนต่อนาที) × 231 ÷ การเปลี่ยนปริมาตรของมอเตอร์ (ลูกบาศก์นิ้ว/รอบ)
ความเร็วของมอเตอร์ (รอบต่อนาที) = อัตราการไหล (ลิตรต่อนาที) × 1000 ÷ ปริมาตรการเคลื่อนที่ของมอเตอร์ (มิลลิลิตรต่อรอบ)
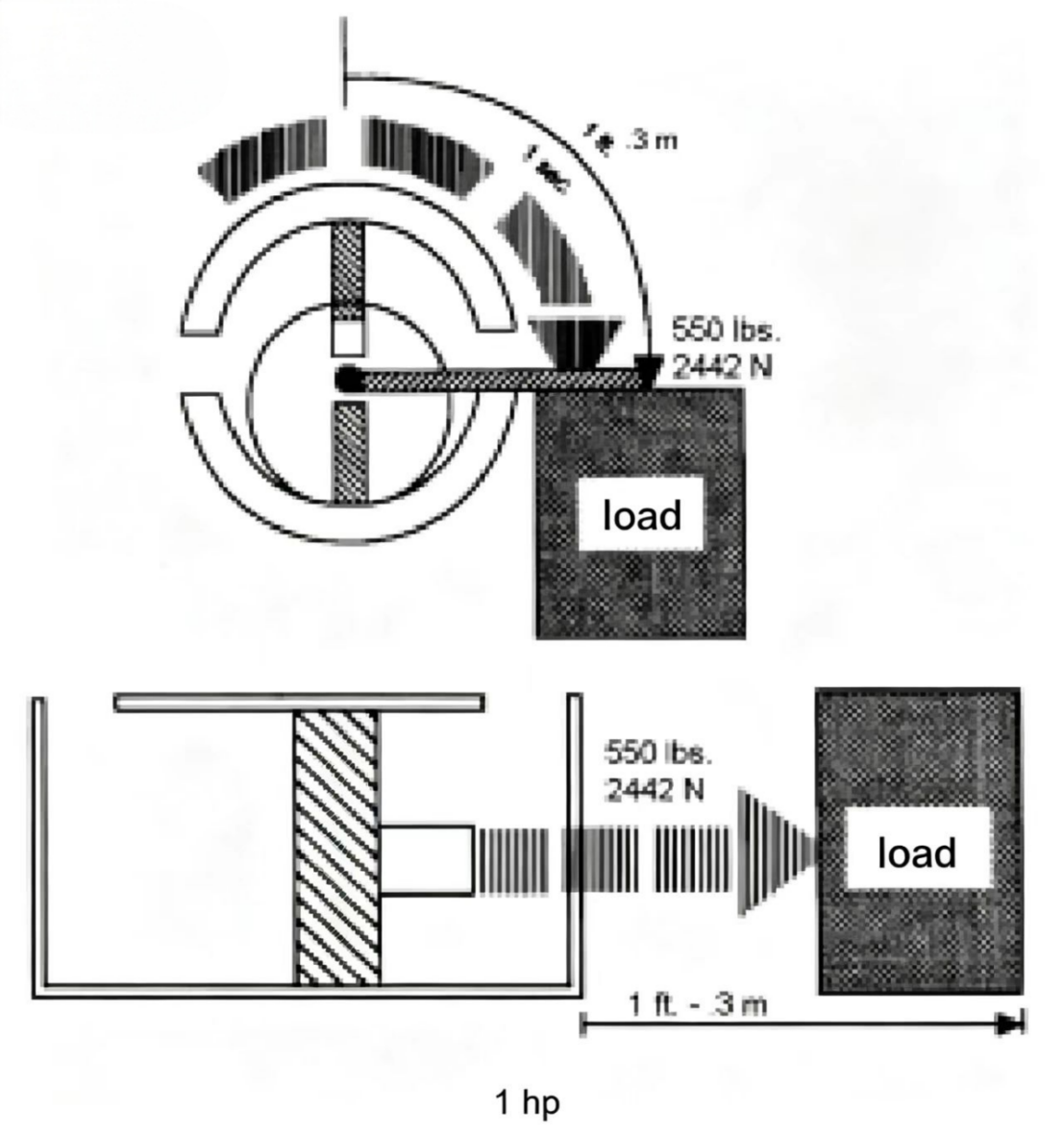
ในบทก่อนหน้า เราได้เรียนรู้ว่า กำลังคืออัตราของการทำงาน กล่าวคือ แรงม้า (hp) = ฟุต-ปอนด์ต่อเวลา หรือ วัตต์ (W) = จูลต่อเวลา
เราทราบด้วยว่า แรงม้า (hp) หรือวัตต์ (W) คือหน่วยวัดกำลัง หากกระบอกสูบไฮดรอลิกหรือมอเตอร์ไฮดรอลิกขับโหลดด้วยแรงเชิงกล 550 ปอนด์ (2,442 นิวตัน) และเคลื่อนย้ายมันเป็นระยะ 1 ฟุต (0.30 เมตร) ภายในเวลา 1 วินาที จะใช้กำลังเท่ากับ 1 แรงม้า (746 วัตต์) แต่หากงานเดียวกันนี้ (550 ฟุต-ปอนด์ / 746 จูล) ถูกทำเสร็จภายในครึ่งวินาที ความเร็วในการทำงานจะเพิ่มเป็นสองเท่า และกำลังที่ใช้จะเท่ากับ 2 แรงม้า (1,490 วัตต์)
กำลังเชิงกลที่ถูกส่งผ่านโดยกระบอกสูบหรือมอเตอร์ไปยังโหลดนั้นเท่ากับกำลังไฮดรอลิกที่กระบอกสูบหรือมอเตอร์ต้องจัดหาให้ สำหรับระบบไฮดรอลิกที่ทำงานด้วยอัตรา 550 ฟุต-ปอนด์ต่อวินาที (746 จูล) กำลังไฮดรอลิกของระบบนั้นคือ 1 แรงม้า (746 วัตต์) อย่างไรก็ตาม ในสูตรคำนวณกำลังเชิงกล หน่วย "ฟุต (เมตร)" และ "ปอนด์ (นิวตัน)" จะถูกแทนที่ด้วยพารามิเตอร์ไฮดรอลิก ได้แก่ "ปอนด์ต่อตารางนิ้ว (บาร์)" และ "แกลลอนต่อนาที (ลิตรต่อนาที)" โดยจะใช้ตัวประกอบการแปลงในกระบวนการคำนวณกำลังไฮดรอลิก เพื่อแสดงความสัมพันธ์ระหว่าง แกลลอนต่อนาที, ปอนด์ต่อตารางนิ้ว, ฟุต และปอนด์ (หรือ ลิตรต่อนาที, บาร์, เมตร และนิวตัน)
เพื่อคำนวณกำลังของกระบอกสูบไฮดรอลิกหรือระบบไฮดรอลิกทั้งระบบ:
แรงม้า = แกลลอนต่อนาที × ปอนด์ต่อตารางนิ้ว × 0.000583
วัตต์ = แรงม้า × 746
วัตต์ = (5/3) × ลิตรต่อนาที × บาร์
เพื่อคำนวณกำลังขาออกของมอเตอร์ไฮดรอลิก:
แรงม้า = รอบต่อนาที × ทอร์ก (ปอนด์-นิ้ว) / 63,025
กิโลวัตต์ = รอบต่อนาที × ทอร์ก (นิวตัน-เมตร) / 9,543
จนถึงขณะนี้ เราได้พูดคุยเกี่ยวกับมอเตอร์ไฮดรอลิกที่ให้ผลลัพธ์แบบหมุน และกระบอกสูบไฮดรอลิกที่ให้ผลลัพธ์แบบเชิงเส้นแล้ว ตอนนี้เราจะพูดถึงแอคทูเอเตอร์อีกประเภทหนึ่ง ซึ่งให้การหมุนในมุมจำกัด ประเภทนี้เรียกว่า กระบอกสูบแบบสั่น (oscillating cylinder) หรือมอเตอร์แบบสั่น (oscillating motor) โครงสร้างของมันมีความกะทัดรัด ง่ายต่อการใช้งาน และมีประสิทธิภาพสูง — สามารถสร้างแรงบิดสูง และต้องการพื้นที่ติดตั้งเพียงเล็กน้อย รวมทั้งติดตั้งได้ง่าย
แอคทูเอเตอร์แบบสั่นถูกใช้งานในงานต่าง ๆ เช่น การจัดตำแหน่งเครื่องจักรกล (machine tool indexing), การดัดวัสดุ, การยกหรือหมุนวัตถุหนัก, การพลิกวัตถุ, การจัดตำแหน่งชิ้นงาน, อุปกรณ์ยึดจับสำหรับงานขึ้นรูป, การควบคุมระบบเรือ, การเปิด-ปิดวาล์ว เป็นต้น
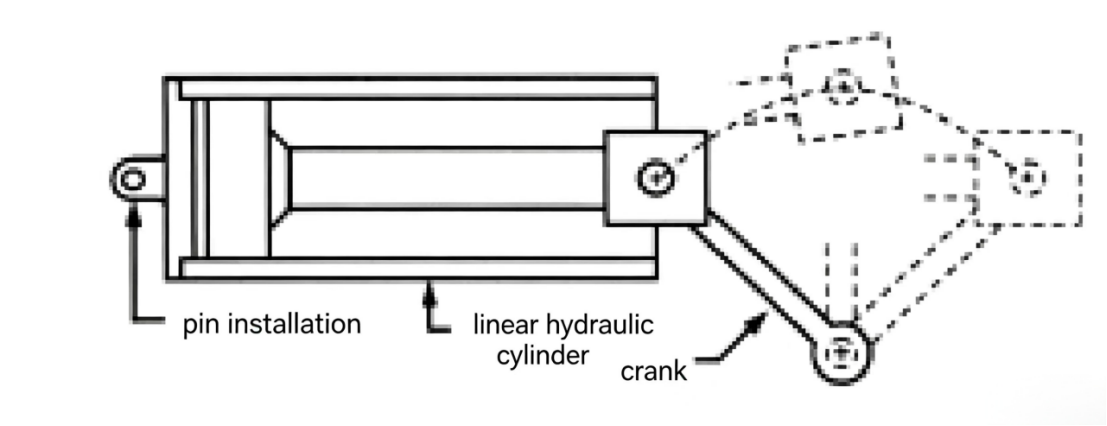
มีกระบอกสูบแบบสั่นหลายชนิด แบบที่ง่ายที่สุดคือ กลไกแบบสั่นที่ขับเคลื่อนด้วยกระบอกสูบไฮดรอลิกเชิงเส้น โดยปลายของกระบอกสูบจะติดตั้งด้วยหมุด (pin) ส่วนก้านลูกสูบเชื่อมต่อกับแครงค์ (crank) ซึ่งขับเพลาให้หมุน กระบอกสูบแบบสั่นนี้สามารถควบคุมได้ด้วยวาล์วควบคุมทิศทาง 4 ทาง (4-way directional valve) โดยมีสวิตช์จำกัดการเคลื่อนที่ (limit switch) ติดตั้งอยู่ที่ปลายแต่ละด้านของการเคลื่อนที่
เช่นเดียวกับอุปกรณ์กลไกทั้งหมด แอคทูเอเตอร์แบบสั่นที่ใช้กระบอกสูบเชิงเส้นประเภทนี้มีลักษณะพื้นฐานบางประการ รวมถึงสามารถประกอบขึ้นจากชิ้นส่วนมาตรฐานที่หาซื้อได้ทั่วไป ทำให้วิศวกรผู้ออกแบบมีความยืดหยุ่นสูง และช่วยควบคุมต้นทุนให้ต่ำลงด้วยชิ้นส่วนสำรองที่หาง่าย
อย่างไรก็ตาม แอคทูเอเตอร์แบบสั่นประเภทนี้ยังมีข้อเสียบางประการ คือ แท่งลูกสูบไม่มีการป้องกันและสัมผัสโดยตรงกับสภาพแวดล้อมภายนอก โดยเฉพาะอย่างยิ่งเนื่องจากกลไกแครงค์มักไม่ได้รับการปิดผนึก จึงก่อให้เกิดอันตรายต่อความปลอดภัย นอกจากนี้ เพลาขับมักต้องรับแรงด้านข้างขนาดใหญ่ ส่งผลให้เกิดความล้มเหลวก่อนกำหนด การสึกหรอมากเกินไป และการติดขัด
สำหรับแอคทูเอเตอร์แบบสั่นประเภทเฉพาะนี้ กระบอกสูบไฮดรอลิกจะต้องสามารถแกว่งตัวได้อย่างอิสระ จึงจำเป็นต้องใช้การต่อเชื่อมด้วยท่อยืดหยุ่น และตลอดช่วงการเคลื่อนที่ของกระบอกสูบ ทอร์กขาออกจะไม่คงที่
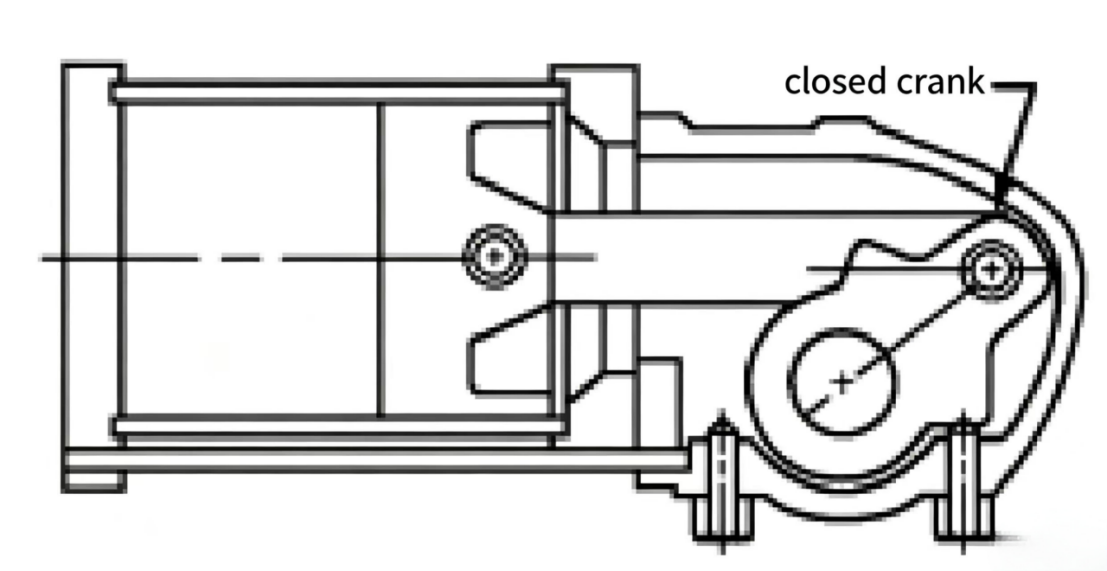
กระบอกสูบแบบสั่นที่มีโครงสร้างปิดล้อมนั้นมีลักษณะคล้ายกับกลไกการสั่นแบบกระบอกสูบเชิงเส้นข้างต้นมาก กระบอกสูบแบบปิดล้อมนี้มีฝาครอบป้องกันที่หุ้มลูกสูบและเพลาข้อเหวี่ยงไว้ทั้งหมด แกนขับมักมีระบบรองรับด้วยแบริ่งเพิ่มเติมเพื่อป้องกันแรงด้านข้างที่รุนแรง ประเภทนี้สามารถติดตั้งวาล์วแม่เหล็กไฟฟ้า สวิตช์จำกัดตำแหน่ง หรือสวิตช์ควบคุมระยะการเคลื่อนที่ได้ ช่วงระยะการเคลื่อนที่โดยทั่วไปสามารถปรับได้ระหว่างประมาณ 85° ถึง 100°
อีกประเภทหนึ่งคือ กระบอกสูบแบบสั่นที่ใช้สปริงคืนตำแหน่ง ซึ่งใช้กระบอกสูบไฮดรอลิกพร้อมสปริงคืนตำแหน่งเพื่อทำให้แกนขับกลับสู่ตำแหน่งเริ่มต้น กระบอกสูบแบบสั่นที่ใช้สปริงคืนตำแหน่งสามารถให้ทอร์กสูงสุดได้ถึง 5,000 นิ้ว-ปอนด์ (565 นิวตัน-เมตร)

กระบอกสูบแบบหมุนกลับไปกลับมาที่พบได้บ่อยที่สุดคือแบบฟันเฟืองและลูกฟัน (rack-and-pinion) ประเภทนี้สามารถรักษาแรงบิดขาออกคงที่ในทั้งสองทิศทางตลอดการหมุนเต็มรอบได้ ในการจัดวางเช่นนี้ ความดันไฮดรอลิกจะกระทำต่อลูกสูบ ซึ่งดันลูกฟันที่เชื่อมต่อกับลูกสูบ ส่งผลให้เกียร์ฟันเฟือง (pinion gear) หมุนเพื่อขับเพลาให้หมุน กระบอกสูบแบบฟันเฟืองและลูกฟันมาตรฐานมีช่วงการหมุน 90°, 180°, 360° หรือแม้แต่มากกว่านั้น แรงบิดขาออกของกระบอกสูบแบบฟันเฟืองและลูกฟันสามารถสูงถึง 52,000,000 ปอนด์-นิ้ว (5,876,000 นิวตัน-เมตร)

นอกจากนี้ยังมีมอเตอร์แบบใบพัดหมุนกลับไปกลับมาให้เลือกใช้งานด้วย มอเตอร์ประเภทนี้อาจมีใบพัดเดี่ยวหรือหลายใบพัด โดยมอเตอร์ใบพัดเดี่ยวสามารถหมุนได้สูงสุด 280° ส่วนมอเตอร์ใบพัดคู่สามารถหมุนได้สูงสุด 200° แรงบิดขาออกของมอเตอร์ใบพัดคู่มีค่าเป็นสองเท่าของมอเตอร์ใบพัดเดี่ยว มอเตอร์แบบใบพัดหมุนกลับไปกลับมาประเภทนี้สามารถสร้างแรงบิดขาออกสูงสุดได้ถึง 500,000 ปอนด์-นิ้ว (นิวตัน-เมตร)

มีมอเตอร์แบบสั่นอีกประเภทหนึ่งที่สร้างแรงบิดโดยใช้กลไกเกลียวแบบสเปิล (helical spline) การเปลี่ยนแปลงความยาวและระยะห่างของเกลียว (pitch) ทำให้สามารถปรับช่วงการหมุนได้ในขอบเขตที่กว้างมาก มอเตอร์แบบสั่นชนิดนี้ประกอบด้วยเพลาเกลียวแบบสเปิลหนึ่งตัว ซึ่งมีปลอกกระบอกสูบแบบสเปิลภายในติดอยู่บนเพลา — การหมุนของปลอกกระบอกสูบถูกจำกัดด้วยแท่งนำทาง (guide rods) เมื่อปลอกกระบอกสูบเคลื่อนที่ภายในกระบอกสูบ จะขับเคลื่อนเพลาเกลียวให้หมุน ช่วงการหมุนมาตรฐานคือ 90°, 180°, 270° และ 360° โดยมีแรงบิดส่งออกสูงสุดถึง 1,000,000 นิ้ว-ปอนด์ (13,000 นิวตัน-เมตร)
มอเตอร์แบบสั่นระบบโซ่และเฟืองใช้ลูกสูบ โซ่ และเฟืองในการขับเคลื่อนเพลา อุปกรณ์ขับเคลื่อนชนิดนี้มักมีลูกสูบขนาดใหญ่หนึ่งตัว (ในฐานะอุปกรณ์ขับเคลื่อน) เพื่อดึงโซ่ และลูกสูบขนาดเล็กอีกตัวหนึ่งเพื่อป้องกันไม่ให้น้ำมันรั่วไหลผ่านเส้นทางคืนของโซ่ แรงบิดส่งออกสามารถสูงถึงประมาณ 23,000 นิ้ว-ปอนด์ (2,599 นิวตัน-เมตร) และการหมุนของเพลาขับสามารถหมุนได้สูงสุดถึงห้ารอบเต็ม หรือ 1,800°
ในการเลือกไซลินเดอร์แบบสั่นที่เหมาะสมที่สุดสำหรับการใช้งานเฉพาะเจาะจง จำเป็นต้องพิจารณาหลายปัจจัย ได้แก่ ค่าแรงบิด ความเร็ว และวิธีการขับเคลื่อน การเลือกมอเตอร์แบบสั่นจริงจะอธิบายไว้ในบทอื่น และจะกล่าวเพิ่มเติมเกี่ยวกับวิธีการพิจารณาว่าควรใช้แบบทำงานด้านเดียวหรือสองด้าน ควรใช้ระบบควบคุมตำแหน่งแบบปิด (closed-loop positioning) หรือไม่ จำเป็นต้องติดตั้งระบบลดแรงกระแทก (cushioning) หรือไม่ เป็นต้น นอกจากนี้ยังจะพิจารณาความถี่ในการทำงานหรือช่วงเวลาของแต่ละรอบการทำงานด้วย
ความเร็วของแอคทูเอเตอร์ขึ้นอยู่กับอัตราการไหล (gpm หรือ L/min)
ความเร็วเชิงเส้นของก้านลูกสูบของไซลินเดอร์ไฮดรอลิกขึ้นอยู่กับความเร็วที่ปั๊มส่งของเหลวเข้าไปยังห้องลูกสูบของไซลินเดอร์ (gpm หรือ L/min) ส่วนความเร็วเชิงหมุนของเพลาขับมอเตอร์ไฮดรอลิกขึ้นอยู่กับอัตราการไหล (gpm หรือ L/min) ที่ส่งเข้าไปยังมอเตอร์ไฮดรอลิก
แรงผลลัพธ์ของแอคทูเอเตอร์ขึ้นอยู่กับความดัน (psi หรือ bar)
แรงผลลัพธ์ของกระบอกสูบแสดงเป็นหน่วย psi (บาร์) — แรงผลลัพธ์ที่เพลาขับของมอเตอร์เกิดจากความดันที่กระทำต่อพื้นที่ผิวที่เปิดเผยของชุดหมุนของมอเตอร์ กำลังที่สร้างโดยแอคทูเอเตอร์เป็นฟังก์ชันของความเร็วแอคทูเอเตอร์คูณด้วยแรงผลลัพธ์ของแอคทูเอเตอร์
สำหรับกระบอกสูบ แรงผลลัพธ์แสดงเป็นหน่วย psi และความเร็วของก้านลูกสูบแสดงเป็นหน่วย gpm ค่าคงที่ 0.000583 ใช้อธิบายความสัมพันธ์ระหว่าง psi, gpm และกำลัง สำหรับมอเตอร์ แรงผลลัพธ์แสดงเป็นหน่วยทอร์ก และความเร็วในการทำงานของมอเตอร์แสดงเป็นหน่วย rpm ค่าคงที่ 63,025 ใช้อธิบายความสัมพันธ์ระหว่าง rpm, ทอร์ก และกำลัง

ยินดีต้อนรับสู่ Hovoo โรงงานปักผนึกจีน ผลิตปักผนึก PU, ยาง และ PTFE ปักผนึกประกอบด้วย O-ring, ปักผนึกพิสตอง, ปักผนึกไม้, ปักผนึกแหวนสีเทาและปักผนึกแก๊ส



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}