33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]
33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]

วาล์วควบคุมทิศทางการไหลประกอบด้วยส่วนหลักคือตัวเรือนวาล์วที่มีช่องรับเข้าและช่องปล่อยออก รวมทั้งส่วนที่เคลื่อนที่ได้ซึ่งถูกดันด้วยสปริง ส่วนที่เคลื่อนที่ได้นี้อาจเป็นแผ่นดิสก์ แผ่นเรียบ หรือหัววาล์วแบบป๊อปเพ็ต — ในระบบน้ำมันไฮดรอลิก มักใช้ลูกบอลหรือหัววาล์วแบบป๊อปเพ็ตที่นั่งบนที่นั่งเป็นส่วนใหญ่
ของไหลสามารถไหลผ่านวาล์วควบคุมทิศทางการไหลได้ในทิศทางเดียวเท่านั้น คือทิศทางการไหลแบบอิสระ เมื่อความดันของระบบที่ช่องรับเข้าเพิ่มขึ้นสูงพอที่จะเอาชนะแรงดันจากสปริงที่ดันหัววาล์วแบบป๊อปเพ็ต หัววาล์วแบบป๊อปเพ็ตจะถูกผลักออกจากที่นั่ง ทำให้ของไหลไหลผ่านไปได้ นี่คือทิศทางการไหลแบบอิสระ แต่เมื่อของไหลพยายามไหลย้อนกลับจากช่องปล่อยออก หัววาล์วแบบป๊อปเพ็ตจะถูกผลักกลับเข้าสู่ที่นั่ง ปิดผนึกทางผ่านไว้อย่างสมบูรณ์ และป้องกันการไหลย้อนกลับ
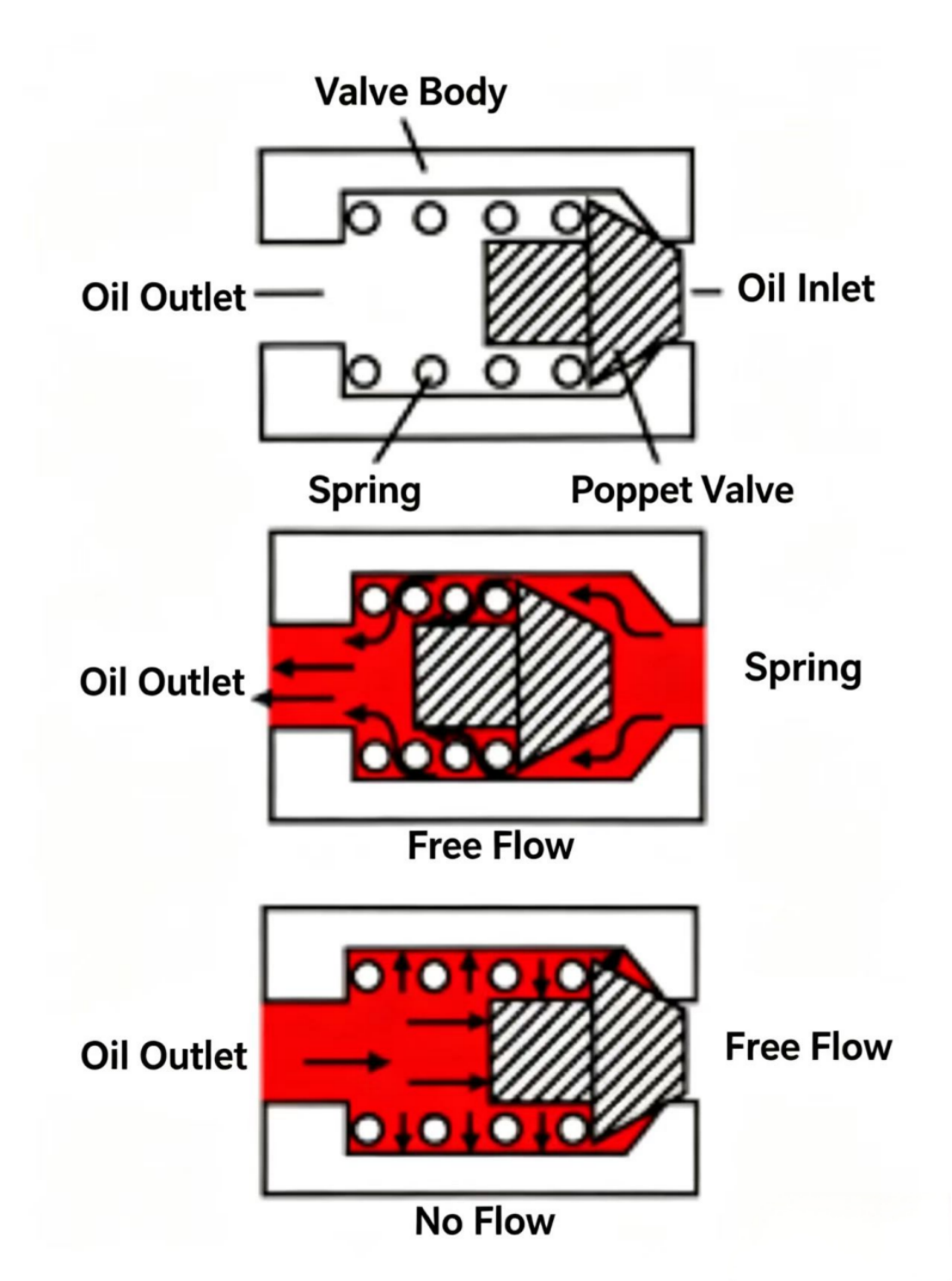
รูปที่ 8-1 วาล์วควบคุมทิศทางการไหล หัววาล์วแบบป๊อปเพ็ตที่มีสปริงดันจะนั่งลงบนที่นั่งเมื่อการไหลย้อนกลับเกิดขึ้น จึงปิดกั้นการไหลย้อนกลับอย่างสมบูรณ์ วาล์วควบคุมทิศทางการไหลนี้เทียบเท่ากับถนนทางเดียวในระบบไฮดรอลิก
วาล์วควบคุมทิศทางแบบหนึ่งทาง (Check valve) มีทั้งฟังก์ชันควบคุมทิศทางและแรงดัน — อนุญาตให้ของไหลผ่านได้ในทิศทางเดียวเท่านั้น ในระบบไฮดรอลิก วาล์วควบคุมทิศทางแบบหนึ่งทางมักใช้เป็นวาล์วเบี่ยงทาง (bypass valve) เพื่อให้ของไหลสามารถเบี่ยงผ่านชิ้นส่วนใดชิ้นหนึ่งได้ ตัวอย่างเช่น วาล์วควบคุมทิศทางแบบหนึ่งทางที่ต่ออนุกรมขนานกับวาล์วควบคุมอัตราการไหล จะทำให้ของไหลย้อนกลับสามารถเบี่ยงผ่านวาล์วควบคุมอัตราการไหลได้
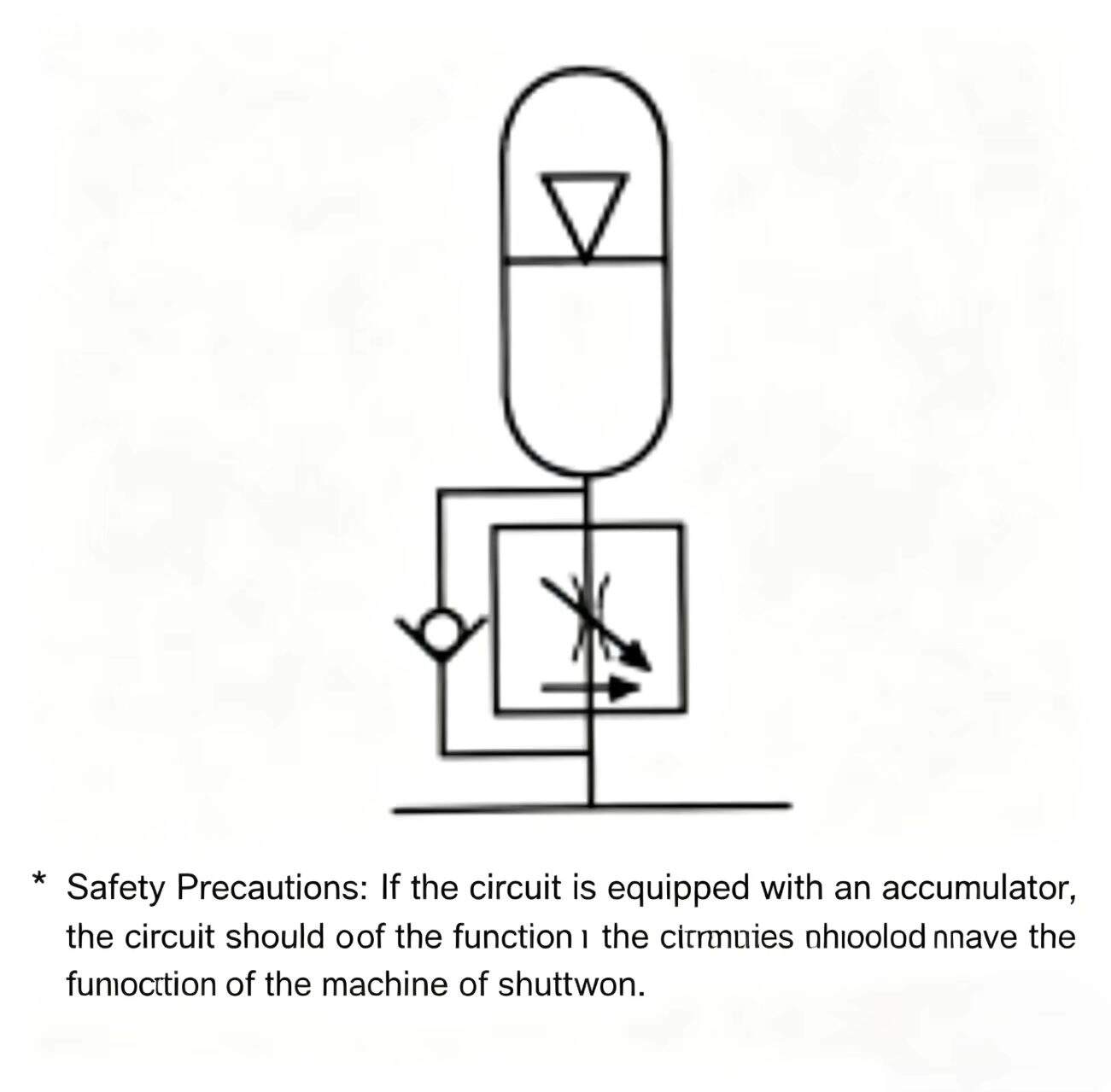
วาล์วควบคุมทิศทางแบบหนึ่งทางยังสามารถแยกสาขาหรือชิ้นส่วนหนึ่งของระบบออกจากกันได้ ตัวอย่างเช่น ในการใช้งานร่วมกับแอคคิวมูเลเตอร์ (accumulator) วาล์วควบคุมทิศทางแบบหนึ่งทางจะป้องกันไม่ให้แอคคิวมูเลเตอร์ปล่อยพลังงานกลับผ่านวาล์วระบายแรงดัน (relief valve) หรือปั๊มไฮดรอลิก
ความปลอดภัย: เมื่อใช้วาล์วควบคุมทิศทางแบบหนึ่งทางในวงจรแอคคิวมูเลเตอร์ วงจรนั้นต้องมีกลไกที่สามารถปล่อยแรงดันจากแอคคิวมูเลเตอร์ออกโดยอัตโนมัติเมื่อเครื่องจักรถูกปิดลง
วาล์วควบคุมทิศทางการไหล (Check Valve) โดยทั่วไปเป็นอุปกรณ์ที่มีการรั่วซึมต่ำมาก แท้จริงแล้วสามารถออกแบบให้ไม่มีการรั่วซึมเลยก็ได้ วาล์วควบคุมทิศทางการไหลสามารถรับน้ำหนักได้นานเกือบไม่สิ้นสุด อย่างไรก็ตาม โปรดจำไว้ว่า วาล์วควบคุมทิศทางการไหลเป็นวาล์วแบบทางเดียว — เพื่อปล่อยน้ำหนักออก ชิ้นส่วนที่เคลื่อนที่ได้จะต้องถูกดันออกจากตำแหน่งที่นั่งของมัน ซึ่งจำเป็นต้องใช้ประเภทพิเศษของวาล์วควบคุมทิศทางการไหลที่เรียกว่า วาล์วควบคุมทิศทางการไหลแบบควบคุมด้วยแรงดันนำ (Pilot-Operated Check Valve)
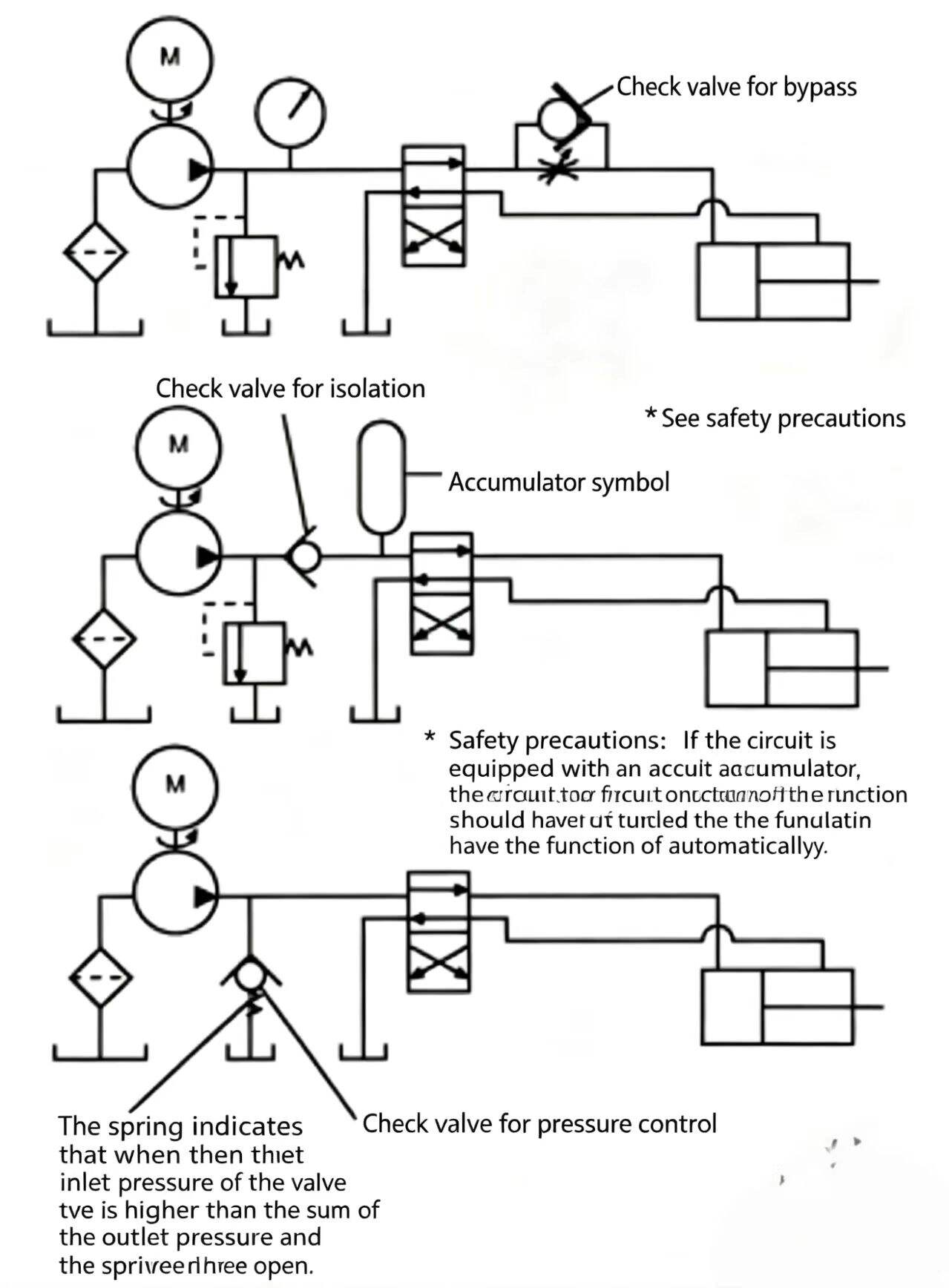
รูปที่ 8-2 การใช้งานวาล์วควบคุมทิศทางการไหลสามแบบทั่วไปในวงจรไฮดรอลิก: ทางเบี่ยงรอบอุปกรณ์ควบคุมอัตราการไหล (flow control), การแยกแอคคิวมูเลเตอร์ (accumulator) ออกจากวงจร และการตั้งค่าเกณฑ์ความดันแบบใช้สปริง
ส่วนประกอบไฮดรอลิกชนิดสปูล (spool-type) ส่วนใหญ่มีการไหลผ่านภายในบางส่วน — ซึ่งไม่ได้บ่งชี้ว่าคุณภาพต่ำ เพราะโดยทั่วไปการไหลผ่านภายในนี้ถูกออกแบบไว้โดยเจตนาเพื่อหล่อลื่นชิ้นส่วนนั้น อย่างไรก็ตาม หากระบบต้องการให้กระบอกสูบ (cylinder) สามารถรับน้ำหนักที่แขวนลอยไว้โดยไม่เคลื่อนตัวหรือคลาดเคลื่อน (creeping) การรั่วซึมจะกลายเป็นปัญหา ในสถานการณ์เช่นนี้ จึงจำเป็นต้องใช้วาล์วควบคุมทิศทางการไหลที่มีความสามารถในการปิดผนึกอย่างมีประสิทธิภาพ
วาล์วควบคุมทิศทางแบบพิล็อต (Pilot-operated check valve) อนุญาตให้ของไหลผ่านได้อย่างอิสระในทิศทางเดียว; เมื่อมีแรงดันพิล็อตกระทำต่อชิ้นส่วนที่เคลื่อนที่ได้ ทำให้ชิ้นส่วนนั้นแยกออกจากที่นั่ง (seat) จะสามารถให้ของไหลผ่านย้อนกลับได้เช่นกัน
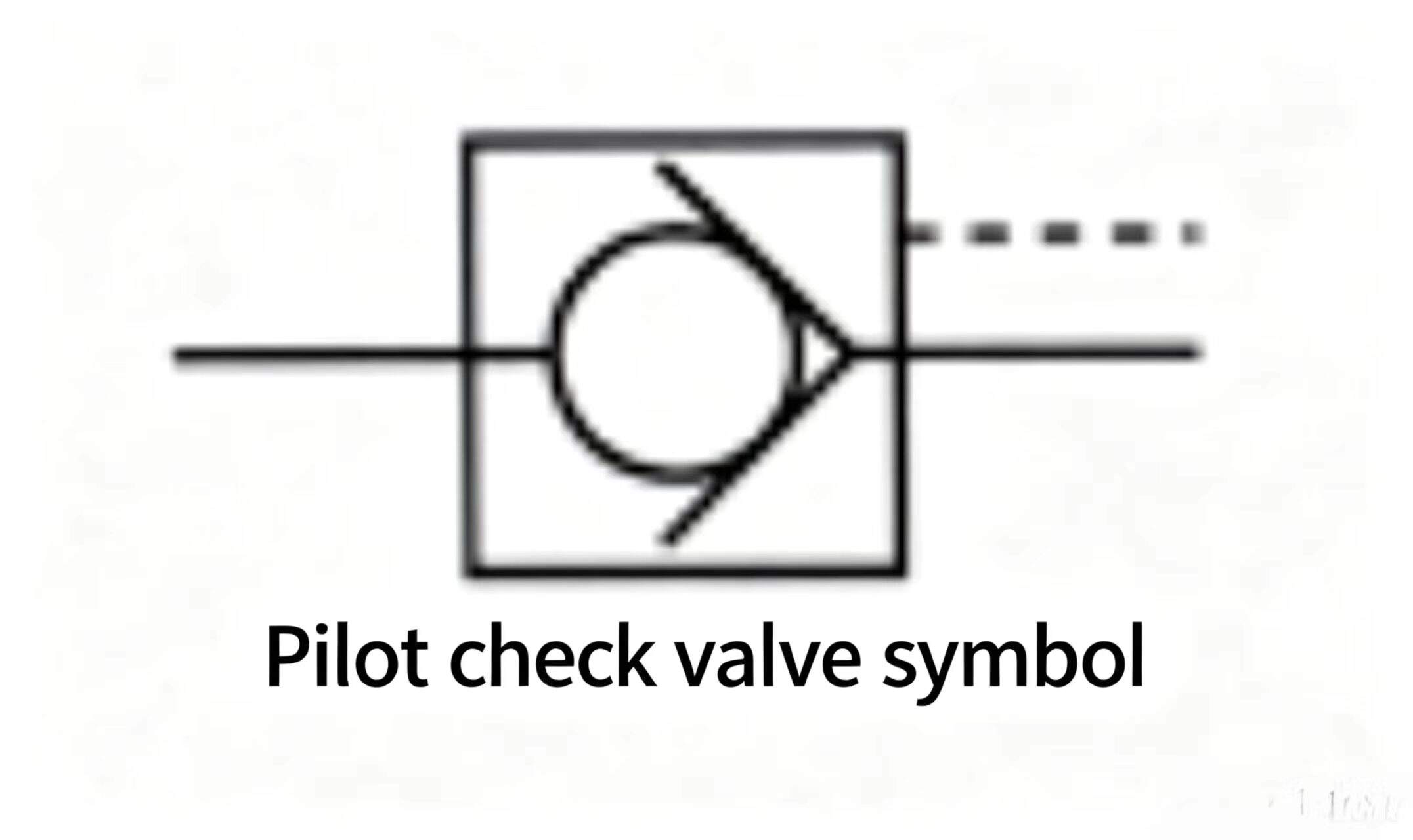
คล้ายกับวาล์วควบคุมทิศทางแบบธรรมดา (regular check valve) วาล์วควบคุมทิศทางแบบพิล็อตมีตัวเรือนวาล์วที่มีช่องรับเข้า (inlet port) และช่องจ่ายออก (outlet port) พร้อมป๊อปเป็ต (poppet) ซึ่งเป็นชิ้นส่วนที่เคลื่อนที่ได้และถูกดันด้วยสปริงให้แนบสนิทกับที่นั่ง นอกจากนี้ ตรงข้ามกับที่นั่งอย่างแม่นยำ ป๊อปเป็ตยังติดตั้งแท่งดัน (push rod) และลูกสูบพิล็อต (pilot piston) ที่ถูกดันด้วยสปริงแบบนุ่ม แรงดันพิล็อตจากช่องพิล็อต (pilot port) จะกระทำต่อลูกสูบพิล็อต โดยช่องว่างภายในลูกสูบที่มีสปริงจะมีช่องระบายน้ำ (drain port)
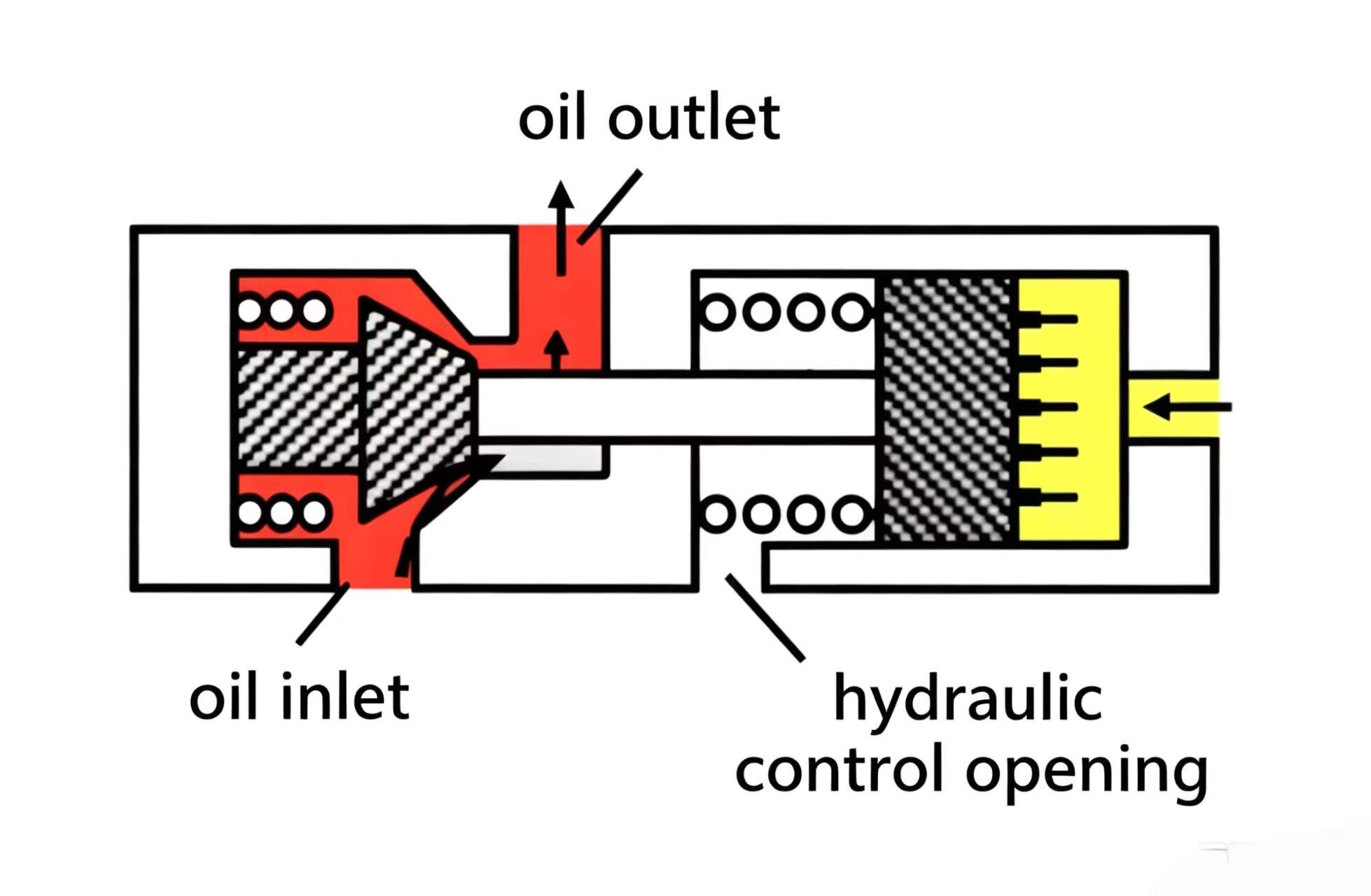
วาล์วควบคุมทิศทางแบบพิล็อตอนุญาตให้ของไหลผ่านได้อย่างอิสระจากช่องรับเข้าไปยังช่องจ่ายออก เช่นเดียวกับวาล์วควบคุมทิศทางแบบธรรมดา ขณะที่ของไหลพยายามไหลเข้าจากช่องจ่ายออก จะถูกบังคับให้ป๊อปเป็ตแนบกับที่นั่ง ทำให้ทางผ่านปิดลง แต่เมื่อมีแรงดันพิล็อตที่เพียงพอมากระทำต่อลูกสูบพิล็อต ลูกสูบจะเคลื่อนที่และดันป๊อปเป็ตควบคุมทิศทางให้ยกตัวขึ้นจากที่นั่ง ตราบใดที่แรงที่กระทำต่อลูกสูบพิล็อตมีขนาดใหญ่พอ ของไหลก็จะสามารถผ่านจากช่องจ่ายออกไปยังช่องรับเข้าได้
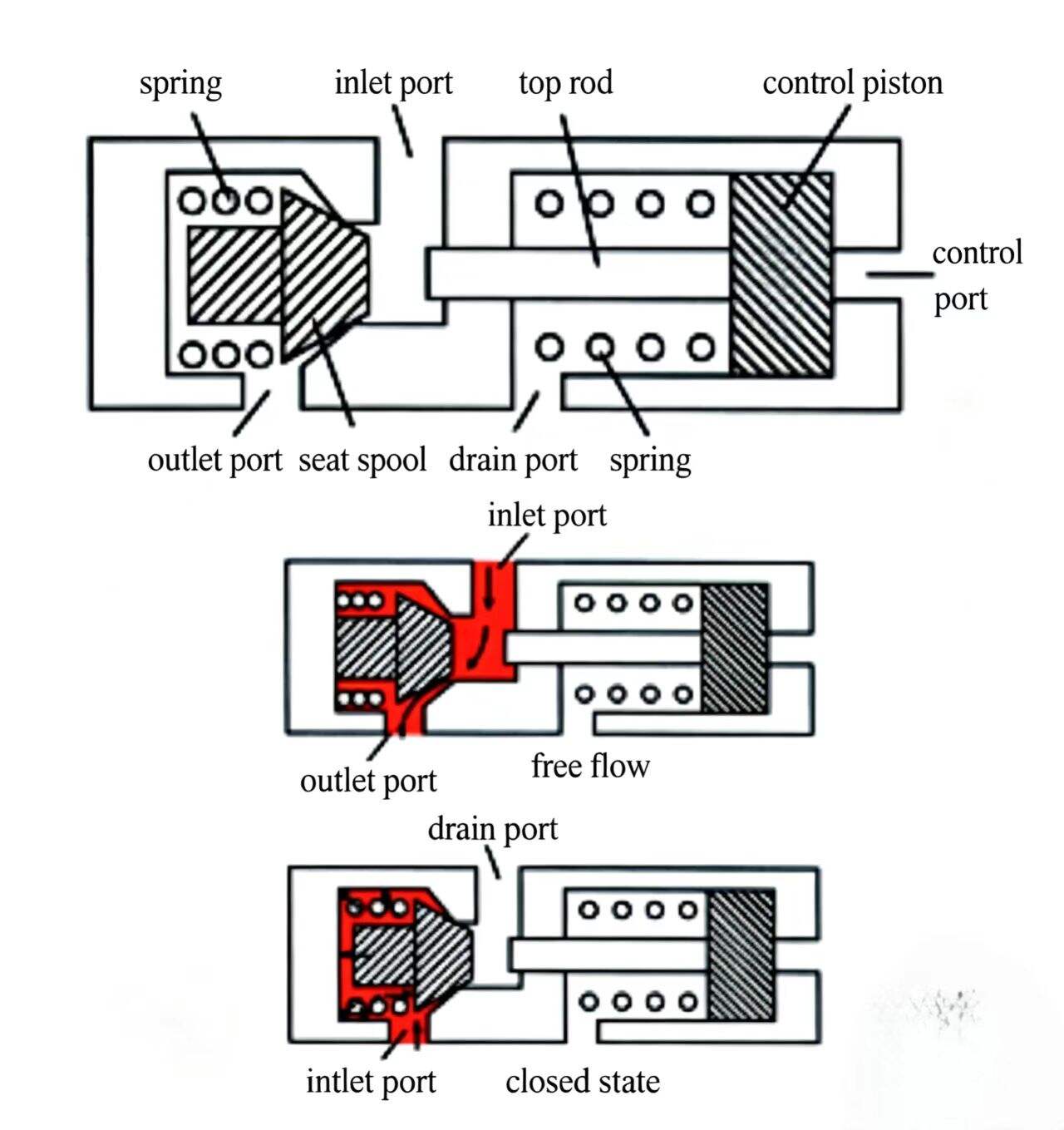
รูปที่ 8-3 วาล์วควบคุมแบบมีแรงดันนำ (Pilot-operated check valve) โดยไม่มีแรงดันนำ วาล์วจะทำหน้าที่เหมือนวาล์วตรวจสอบทั่วไป (ให้ไหลผ่านได้ในทิศทางเดียวเท่านั้น) เมื่อมีแรงดันนำมาใช้งาน จะอนุญาตให้ไหลย้อนกลับได้ด้วย — ซึ่งช่วยให้สามารถปล่อยโหลดได้
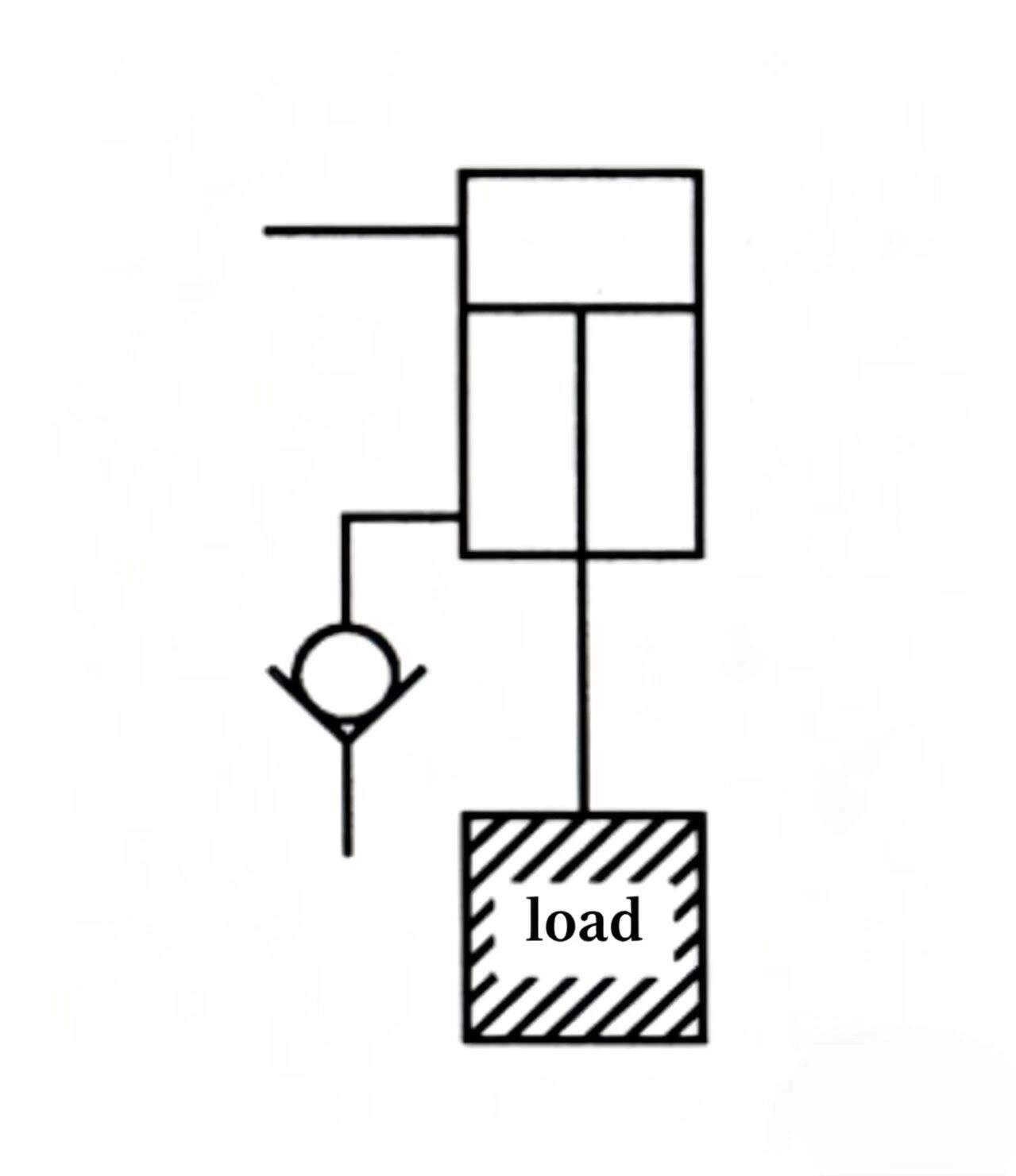
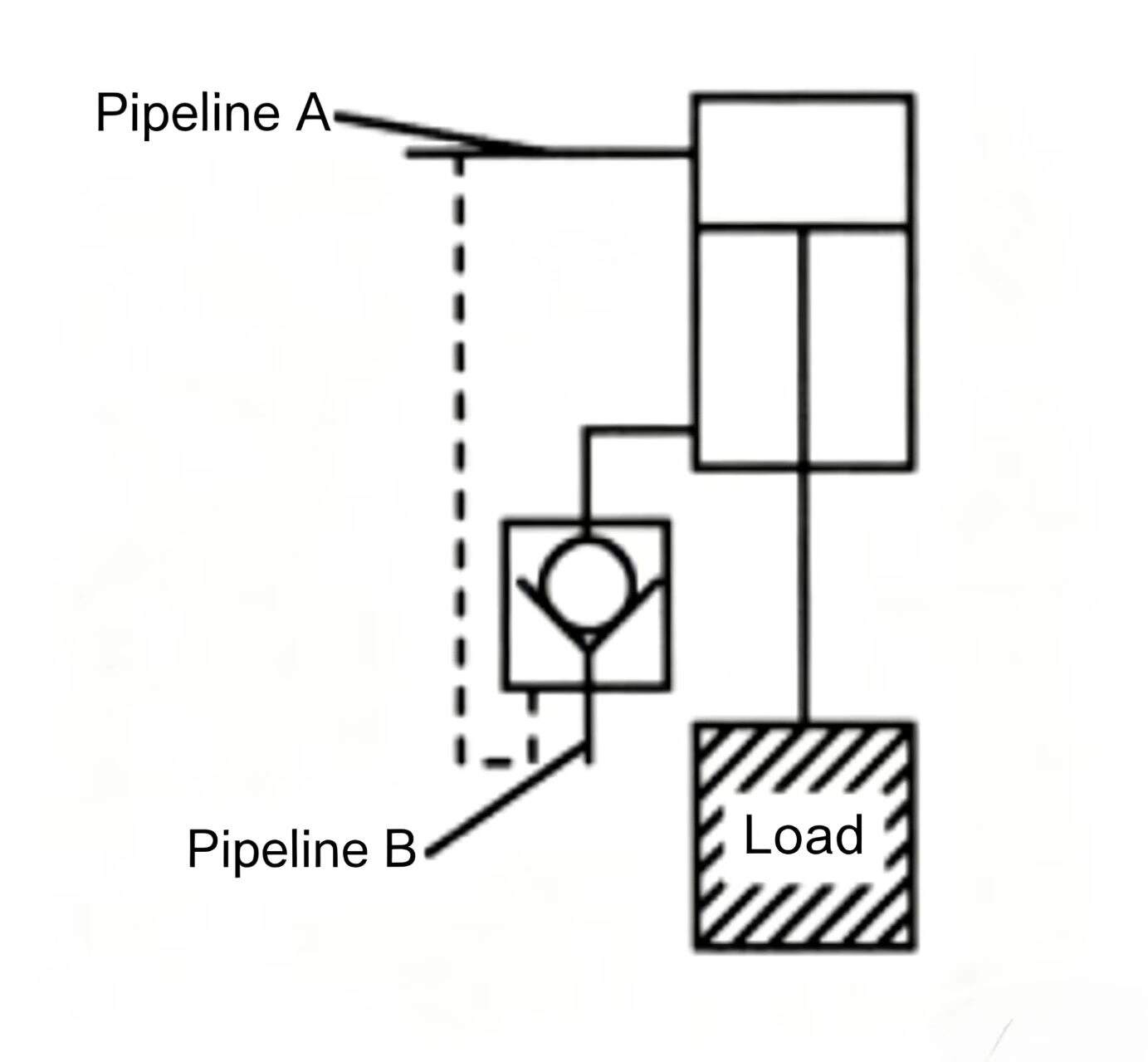
การใช้วาล์วควบคุมแบบมีแรงดันนำหนึ่งตัวเพื่อปิดกั้นการไหลจากพอร์ต B ของกระบอกสูบ จะทำให้โหลดคงอยู่ในตำแหน่งแขวนไว้ได้ตราบใดที่ซีลของกระบอกสูบยังมีประสิทธิภาพ และไม่มีการรั่วไหลในท่อ กระบอกสูบ หรือวาล์วควบคุมแบบมีแรงดันนำ เพื่อให้ลดตำแหน่งโหลดลง ให้จ่ายแรงดันนำจากท่อ A เข้าไปยังลูกสูบควบคุม
แรงดันนำสำหรับวาล์วควบคุมแบบมีแรงดันนำจะถูกนำมาจากท่อทำงานของกระบอกสูบไฮดรอลิก — ตราบใดที่แรงดันในท่อ A สูงพอ วาล์วตรวจสอบจะยังคงเปิดอยู่ เมื่อกำลังยกโหลด น้ำมันจะไหลผ่านวาล์วตรวจสอบได้อย่างสะดวก เนื่องจากนั่นคือทิศทางการไหลแบบไม่มีแรงต้าน
ในบางสถานการณ์ โหลดที่ติดอยู่กับก้านลูกสูบของกระบอกสูบจำเป็นต้องถูกล็อกให้อยู่นิ่ง ในการทำเช่นนี้ สามารถติดตั้งวาล์วตรวจสอบแบบควบคุมด้วยแรงดัน (pilot-operated check valve) ได้ในแต่ละท่อทางเข้า-ออกของกระบอกสูบ — ซึ่งวาล์วตรวจสอบแบบควบคุมด้วยแรงดันจะปิดกั้นการไหลของของเหลวออกจากกระบอกสูบ ตราบใดที่ซีลของกระบอกสูบยังคงมีประสิทธิภาพและไม่มีการรั่วไหลเกิดขึ้นที่ใดๆ โหลดก็สามารถคงอยู่ในตำแหน่งเดิมได้
เพื่อการล็อกโหลดอย่างสมบูรณ์แบบ จำเป็นต้องใช้กระบอกสูบแบบล็อกพิเศษที่มีอุปกรณ์ล็อกเชิงกล อุปกรณ์ล็อกเชิงกลเป็นวิธีที่ปลอดภัยที่สุดในการยึดโหลดไว้
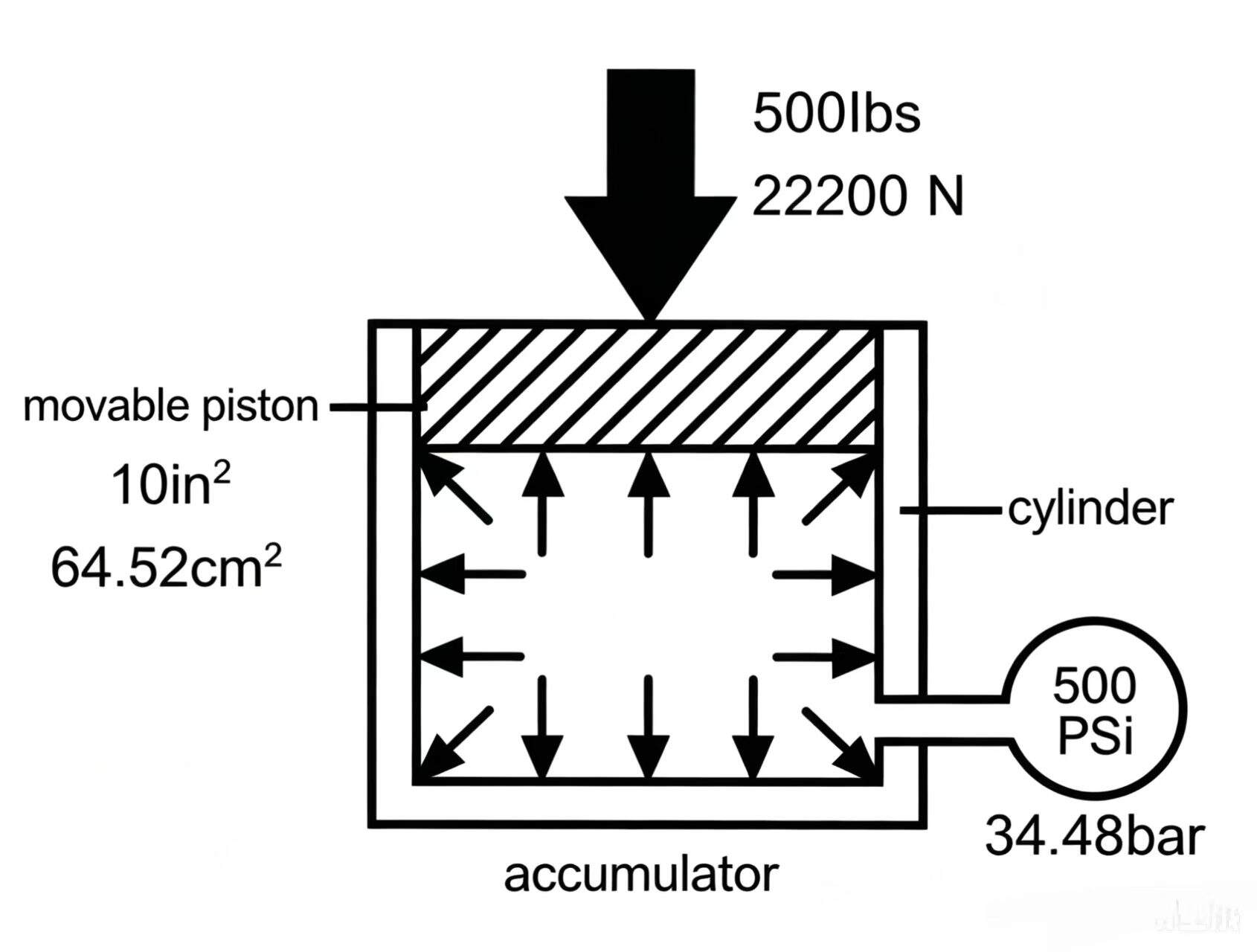
แอคคิวมูเลเตอร์ทำหน้าที่เก็บความดันไฮดรอลิก ซึ่งความดันไฮดรอลิกนี้คือพลังงานศักย์ที่สามารถแปลงเป็นพลังงานในการทำงาน (การไหลและความดัน) ได้
แอคคิวมูเลเตอร์สามารถแบ่งออกได้เป็นสามประเภท ได้แก่ แบบใช้น้ำหนักแรงโน้มถ่วง (gravity-loaded), แบบใช้สปริง (spring-loaded) และแบบของเหลว/ก๊าซ (fluid/gas) ซึ่งแต่ละประเภทแตกต่างกันในวิธีที่ใช้รักษากำลังในการทำงานที่กระทำต่อน้ำมันที่เก็บไว้
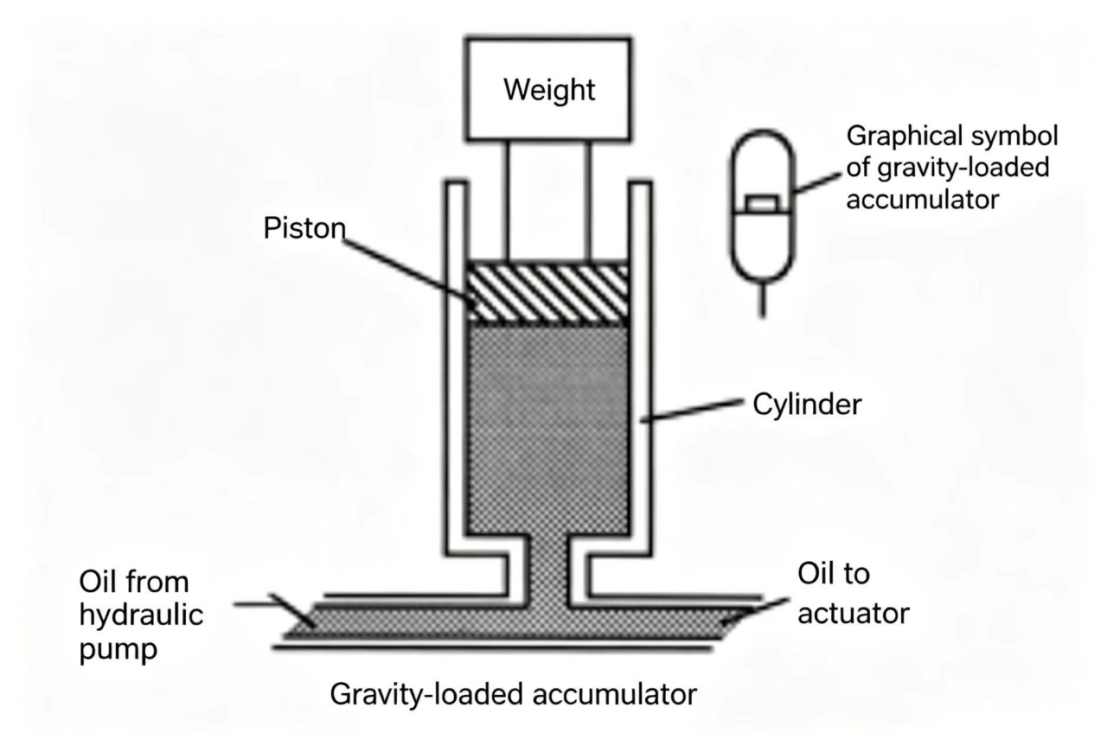
แอคคิวมูเลเตอร์แบบใช้แรงโน้มถ่วง (Gravity-loaded accumulator) ใช้น้ำหนักของวัตถุที่มีมวลมากซึ่งกระทำต่อลูกสูบหรือเพลากดลงเพื่อรักษากำลังทำงานบนน้ำมันที่เก็บไว้ น้ำหนักนี้สามารถผลิตจากวัสดุที่มีความหนาแน่นสูงได้หลายชนิด เช่น เหล็ก คอนกรีต หรือแม้แต่น้ำ แอคคิวมูเลเตอร์แบบใช้แรงโน้มถ่วงโดยทั่วไปมีขนาดใหญ่มาก บางครั้งสามารถเก็บน้ำมันได้หลายร้อยแกลลอน มันสามารถให้บริการระบบไฮดรอลิกหลายระบบพร้อมกัน และมักใช้งานในโรงกลิ้นเหล็ก (rolling mills) และระบบไฮดรอลิกกลาง
คุณสมบัติที่พึงประสงค์ของแอคคิวมูเลเตอร์แบบใช้แรงโน้มถ่วงคือ ความสามารถในการเก็บน้ำมันภายใต้ความดันที่ค่อนข้างคงที่ — ไม่ว่าภาชนะจะเต็มหรือเกือบว่างเปล่า ความดันที่เก็บไว้จะยังคงเกือบไม่เปลี่ยนแปลง เนื่องจากแรงที่กระทำต่อน้ำมันคือแรงโน้มถ่วง (น้ำหนัก) ซึ่งมีค่าคงที่ กล่าวคือ ไม่ว่าน้ำมันในแอคคิวมูเลเตอร์จะมีปริมาณเท่าใด แรงที่กระทำต่อระบบก็ยังคงเท่าเดิม
ลักษณะที่ไม่พึงประสงค์ของแอคคิวมูเลเตอร์แบบใช้แรงโน้มถ่วงคือการก่อให้เกิดแรงกระแทก เมื่อแอคคิวมูเลเตอร์แบบใช้แรงโน้มถ่วงหยุดทำงานอย่างฉับพลันระหว่างการจ่ายของไหลอย่างรวดเร็ว ความเฉื่อยของน้ำหนักที่มากจะก่อให้เกิดการเพิ่มขึ้นของแรงดันอย่างมีนัยสำคัญในระบบ ซึ่งอาจทำให้เกิดการรั่วของท่อและข้อต่อ และอาจก่อให้เกิดการเหนื่อยล้าของโลหะจนนำไปสู่ความล้มเหลวของชิ้นส่วนก่อนกำหนด
รูปที่ 8-6 แอคคิวมูเลเตอร์แบบใช้แรงโน้มถ่วง น้ำหนักคงที่จะสร้างแรงดันคงที่โดยไม่ขึ้นกับปริมาตรของน้ำมัน ใช้งานในระบบที่มีขนาดใหญ่ในภาคอุตสาหกรรม เช่น ระบบไฮดรอลิกในโรงหลอมเหล็ก
แอคคิวมูเลเตอร์แบบสปริงโหลดใช้สปริงที่กระทำต่อลูกสูบเพื่อรักษากำลังที่กระทำต่อน้ำมันที่เก็บไว้ สปริงโหลดแอคคิวมูเลเตอร์โดยทั่วไปมีขนาดเล็กกว่าแบบแรงโน้มถ่วง โดยสามารถเก็บน้ำมันได้เพียงไม่กี่แกลลอน มักใช้งานกับระบบไฮดรอลิกเพียงระบบเดียว และโดยทั่วไปจะทำงานที่ความดันต่ำ เมื่อน้ำมันภายใต้ความดันไหลเข้าสู่แอคคิวมูเลเตอร์แบบสปริงโหลด ความดันของน้ำมันที่เก็บไว้จะขึ้นอยู่กับระยะที่สปริงถูกบีบอัด เมื่อลูกสูบเคลื่อนที่ขึ้นและบีบอัดสปริงเป็นระยะ 10 นิ้ว (25.4 ซม.) ความดันที่เก็บไว้จะสูงกว่าเมื่อสปริงถูกบีบอัดเพียง 4 นิ้ว (10.2 ซม.)
เพื่อป้องกันไม่ให้น้ำมันรั่วสะสมอยู่ภายในช่องสปริง ช่องสปริงจึงมีรูระบายน้ำสำหรับให้น้ำมันที่รั่วไหลออกสู่ภายนอก แอคคิวมูเลเตอร์แบบใช้สปริงไม่ควรระบายน้ำมันออกสู่ถังเก็บน้ำมันโดยตรง เนื่องจากจะทำให้น้ำมันเกิดฟอง ไม่ว่าปลายท่อระบายน้ำจะอยู่เหนือหรือต่ำกว่าระดับของเหลวในถังเก็บน้ำมัน แอคคิวมูเลเตอร์จะยังคงก่อให้เกิดฟองเสมอขณะทำงาน — เมื่อแอคคิวมูเลเตอร์ปล่อยกระแสไหลออกมาอย่างรวดเร็ว น้ำมันที่อยู่เหนือลูกสูบจะไม่สามารถตามการเคลื่อนที่ของลูกสูบได้ทัน ส่งผลให้เกิดสุญญากาศบางส่วนภายในช่องสปริง ทำให้อากาศแยกตัวออกจากน้ำมัน เมื่อแอคคิวมูเลเตอร์ชาร์จใหม่ ลูกสูบจะเคลื่อนที่ขึ้น ดันน้ำมันที่มีอากาศผสมกลับเข้าสู่ถังเก็บน้ำมัน ฟองอากาศในถังเก็บน้ำมันเป็นสิ่งที่ไม่พึงประสงค์ ดังนั้นแอคคิวมูเลเตอร์แบบใช้สปริงจึงมักไม่ระบายน้ำมันออกสู่ภายนอก
สำหรับแอคคิวมูเลเตอร์แบบใช้สปริงที่มีระบบระบายน้ำจากช่องสปริงภายนอก หากซีลลูกสูบสึกหรอ จะต้องดำเนินการตรวจสอบและซ่อมแซมทันที หากไม่ซ่อมแซมอย่างทันเวลา อาจจำเป็นต้องทำความสะอาดระบบ
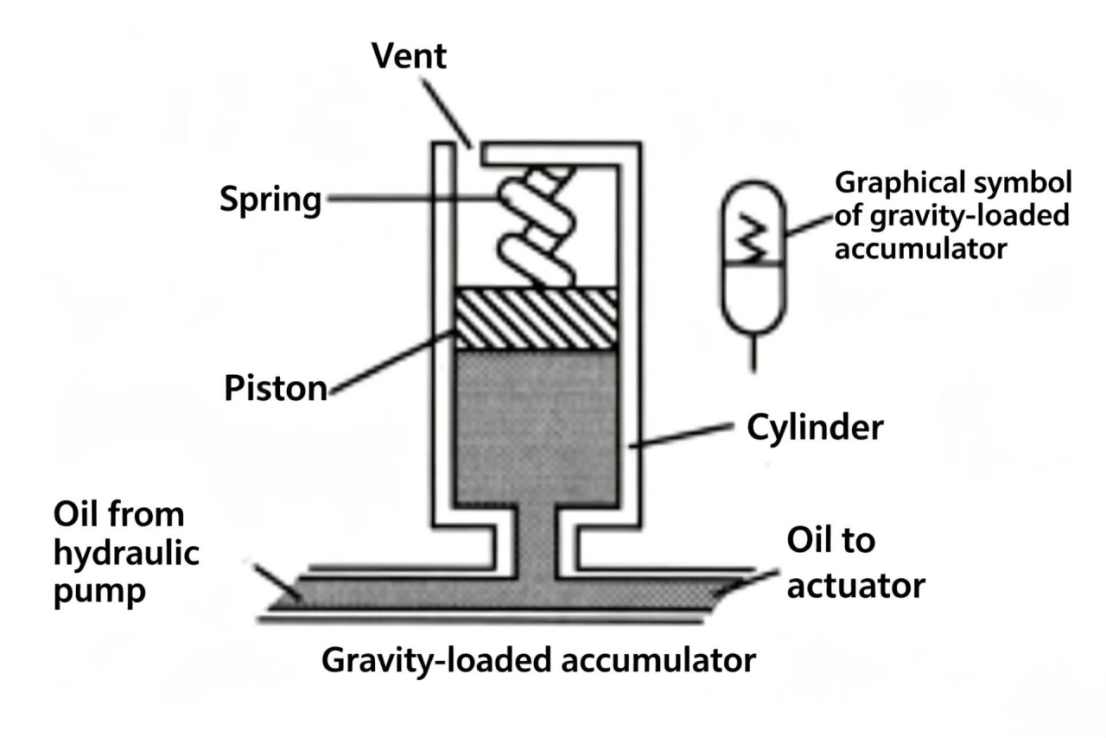
รูปที่ 8-7 แอคคิวมูเลเตอร์แบบใช้สปริงดัน แรงจากสปริง — และดังนั้นความดันที่เก็บไว้ — จะเพิ่มขึ้นเมื่อปลั๊กเคลื่อนที่ขึ้น ใช้งานในระบบที่มีขนาดเล็กและแรงดันต่ำ
แอคคิวมูเลเตอร์แบบของเหลว/ก๊าซเป็นประเภทที่ใช้กันมากที่สุดในระบบไฮดรอลิกอุตสาหกรรม โดยใช้ก๊าซที่ถูกบีบอัดเพื่อรักษาแรงทำงานบนน้ำมันที่เก็บไว้
ความปลอดภัย: ในระบบที่ใช้แอคคิวมูเลเตอร์แบบของเหลว/ก๊าซ ต้องใช้ก๊าซไนโตรเจนแห้งเสมอ ห้ามใช้อากาศที่ถูกบีบอัดเด็ดขาด เนื่องจากส่วนผสมของไอของก๊าซกับน้ำมันอาจเกิดการระเบิดได้
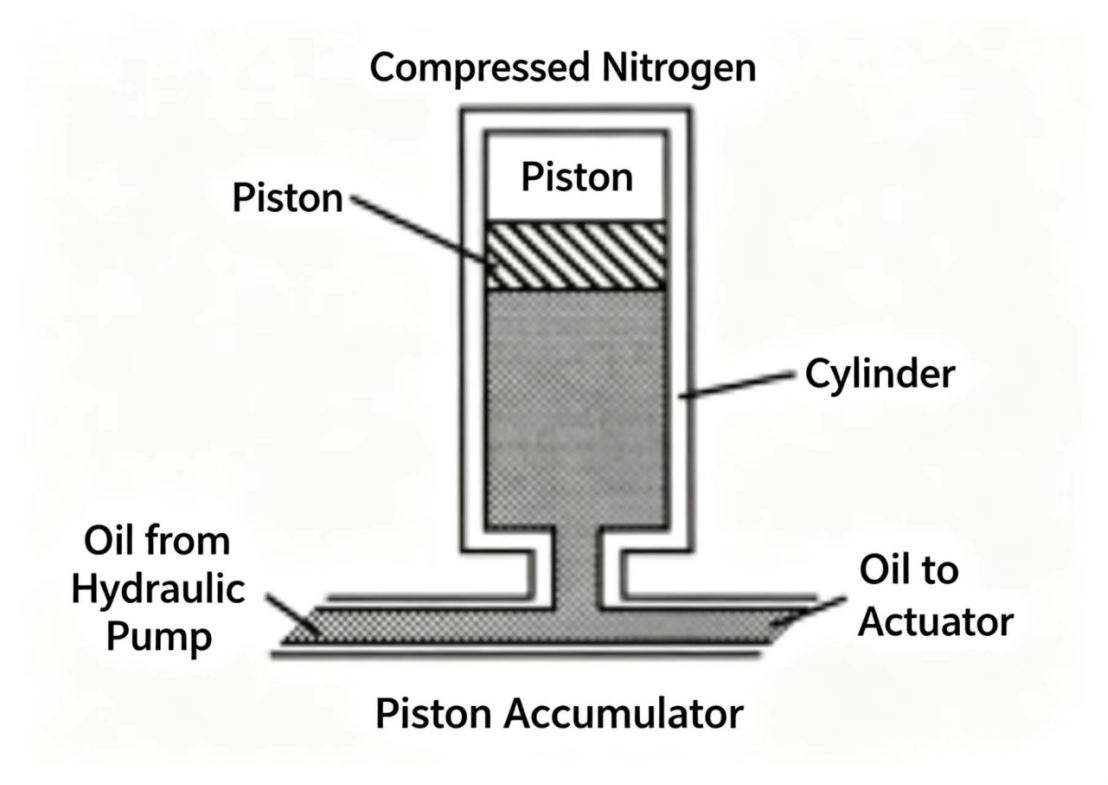
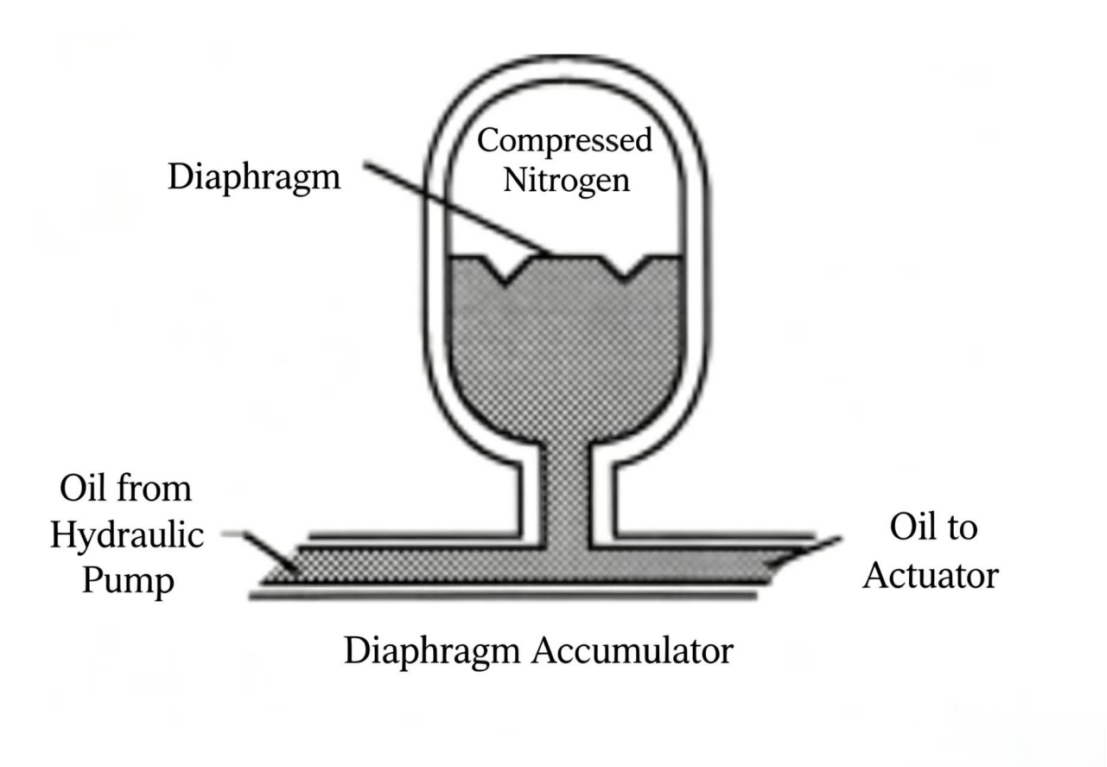
แอคคิวมูเลเตอร์แบบของเหลว/ก๊าซแบ่งออกเป็นสามชนิด ได้แก่ แบบลูกสูบ แบบไดอะแฟรม และแบบถุงยาง (bladder) ขึ้นอยู่กับอุปกรณ์ที่ใช้ในการแยกก๊าซออกจากน้ำมัน
แอคคิวมูเลเตอร์แบบลูกสูบประกอบด้วยกระบอกสูบและลูกสูบที่เคลื่อนที่ได้พร้อมแหวนซีลแบบยืดหยุ่น ช่องว่างด้านบนของลูกสูบถูกเติมก๊าซที่ถูกอัดไว้ เมื่อน้ำมันถูกปั๊มเข้าไปในกระบอกสูบ ก๊าซจะถูกอัดให้ลดปริมาตรลง และเมื่อน้ำมันถูกปล่อยออกจากแอคคิวมูเลเตอร์ ความดันของก๊าซจะลดลง เมื่อน้ำมันถูกปล่อยออกทั้งหมดแล้ว ลูกสูบจะเคลื่อนที่ไปถึงจุดสิ้นสุดของการเคลื่อนที่และปิดรูทางออก ทำให้ก๊าซคงอยู่ภายในแอคคิวมูเลเตอร์
แอคคิวมูเลเตอร์แบบไดอะแฟรมเป็นทรงกลมที่สร้างขึ้นโดยการยึดครึ่งทรงกลมโลหะสองชิ้นเข้าด้วยกันด้วยสลักเกลียว พื้นที่ภายในถูกแบ่งออกด้วยไดอะแฟรมทำจากยางสังเคราะห์ โดยห้องด้านบนจะเติมก๊าซไว้ เมื่อน้ำมันภายใต้ความดันไหลเข้าสู่ห้องอีกด้าน ก๊าซจะถูกอัดให้ลดปริมาตรลง เมื่อน้ำมันถูกปล่อยออกทั้งหมดแล้ว ไดอะแฟรมจะปิดรูทางออกและรักษาก๊าซไว้ภายในแอคคิวมูเลเตอร์ โดยไดอะแฟรมจะไม่ถูกดันออกจนเกินความหนาของตัวมันเอง
แอคคิวมูเลเตอร์แบบถุงลมประกอบด้วยเปลือกโลหะและถุงยางสังเคราะห์ภายใน ถุงยางนี้บรรจุก๊าซไว้ เมื่อน้ำมันไหลเข้าสู่เปลือก ก๊าซภายในถุงยางจะถูกบีบอัด และน้ำมันจะไหลออกจากเปลือก เมื่อน้ำมันทั้งหมดถูกปล่อยออกแล้ว ความดันของก๊าซจะพยายามดันถุงยางผ่านทางออก — แต่เมื่อถุงยางสัมผัสกับวาล์วที่นั่ง (seat valve) ที่ทางออก น้ำมันภายในเปลือกก็จะถูกปิดผนึกโดยอัตโนมัติ
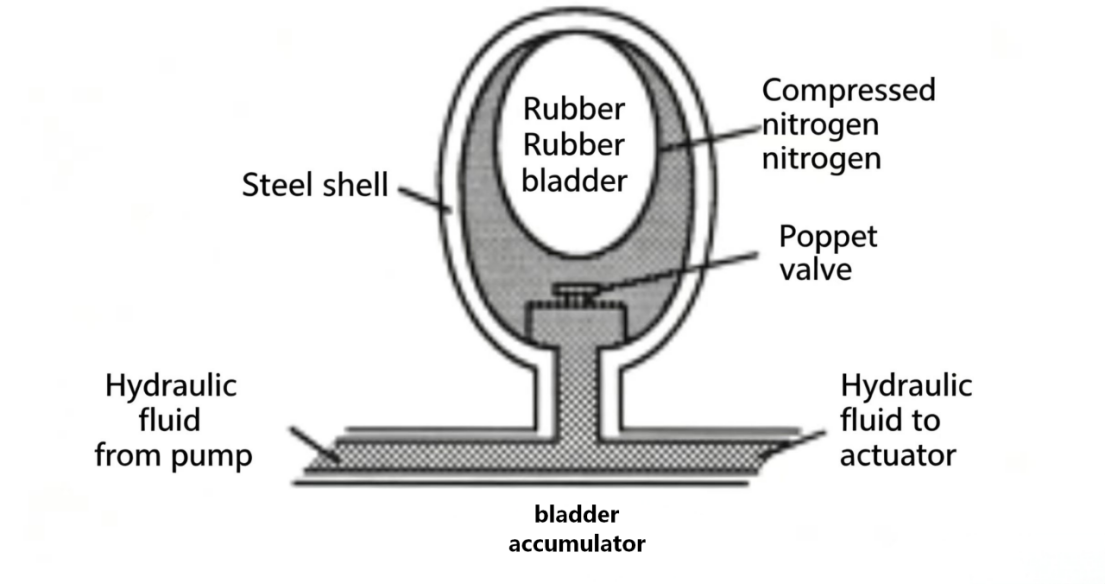
รูปที่ 8-8 ประเภทของแอคคิวมูเลเตอร์ที่ใช้ของเหลว/ก๊าซสามแบบ ทั้งหมดใช้ไนโตรเจนอัดเพื่อเก็บพลังงานไฮดรอลิก ได้แก่ แบบลูกสูบ (ด้านบน) แบบไดอะแฟรม (ตรงกลาง) และแบบถุงลม (ด้านล่าง) ซึ่งแตกต่างกันที่วิธีการแยกก๊าซกับน้ำมัน
แอคคิวมูเลเตอร์สามารถทำหน้าที่หลายประการในระบบไฮดรอลิก ได้แก่ การจ่ายของไหล การรักษาระดับความดัน และการดูดซับแรงกระแทก
การจ่ายของไหลเป็นหนึ่งในวัตถุประสงค์ของการใช้แอคคิวมูเลเตอร์ แอคคิวมูเลเตอร์ที่ถูกชาร์จแล้วทำหน้าที่เป็นแหล่งพลังงานศักย์ไฮดรอลิก เมื่อระบบต้องการของไหลมากกว่าที่ปั๊มจะจ่ายได้ พลังงานที่เก็บไว้ในแอคคิวมูเลเตอร์สามารถนำมาใช้เพื่อสร้างของไหลให้กับระบบได้ ตัวอย่างเช่น หากเครื่องจักรถูกออกแบบให้เวลาทำงานจริงสั้นมากเมื่อเทียบกับรอบการทำงานทั้งหมด ปั๊มที่มีความจุการจ่ายต่ำสามารถใช้ชาร์จแอคคิวมูเลเตอร์เป็นระยะเวลาหนึ่ง เมื่อเครื่องจักรเริ่มทำงาน วาล์วควบคุมทิศทางจะเปลี่ยนตำแหน่งไปยังตำแหน่งทำงาน และแอคคิวมูเลเตอร์จะปล่อยน้ำมันภายใต้แรงดันไปยังแอคทูเอเตอร์ทันทีตามที่ต้องการ วิธีการใช้แอคคิวมูเลเตอร์ร่วมกับปั๊มขนาดเล็กนี้เป็นการเก็บพลังงานสูงสุด (peak power) — กล่าวอีกนัยหนึ่ง คือ แทนที่การใช้ปั๊ม/มอเตอร์ขนาดใหญ่ที่จ่ายของไหลและพลังงานสูงในช่วงเวลาสั้น ๆ ด้วยปั๊ม/มอเตอร์ขนาดเล็กที่ให้กำลังเฉลี่ยตลอดช่วงเวลาที่ยาวนานขึ้น
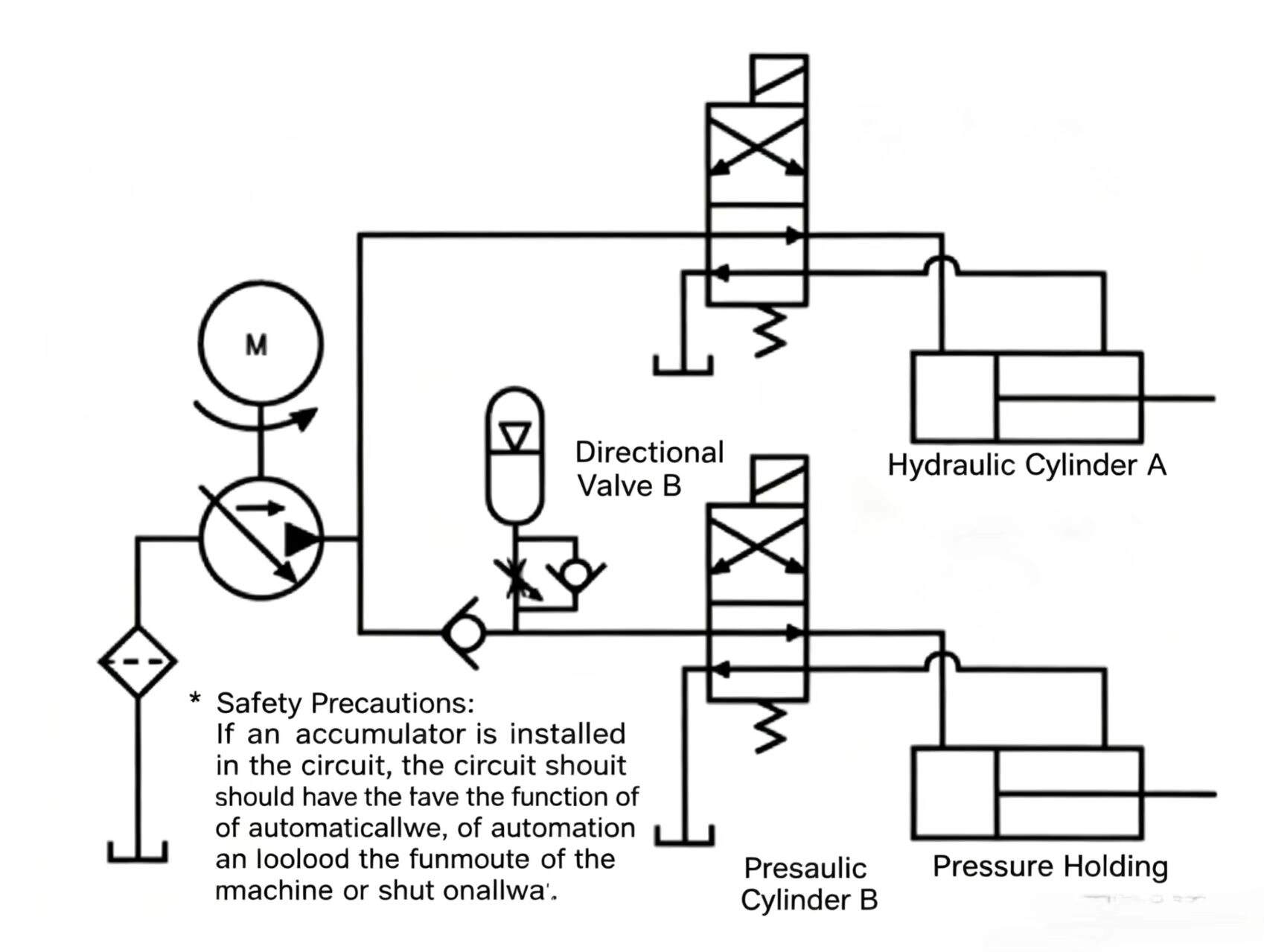
แอคคิวมูเลเตอร์สามารถใช้ในการรักษาระดับแรงดันได้ เมื่อปั๊ม/มอเตอร์กำลังจ่ายของไหลไปยังส่วนอื่น ๆ ของระบบ แอคคิวมูเลเตอร์สามารถรักษาระดับแรงดันไว้ที่แขนงหนึ่งของวงจรได้
เมื่อระบบต้องการให้กระบอกสูบหนีบ A กลับคืน กระบอกสูบหนีบ B จะต้องรักษาแรงดันไว้ ขณะที่วาล์วควบคุมทิศทาง A เปลี่ยนตำแหน่ง แรงดันในปั๊มไฮดรอลิกและท่อของกระบอกสูบ A จะลดลงอย่างรวดเร็ว ในขณะที่แรงดันในกระบอกสูบ B ยังคงรักษาไว้โดยแอคคิวมูเลเตอร์ ซึ่งได้เก็บน้ำมันความดันไว้เพียงพอแล้วเพื่อชดเชยการรั่วไหลในท่อของกระบอกสูบ B
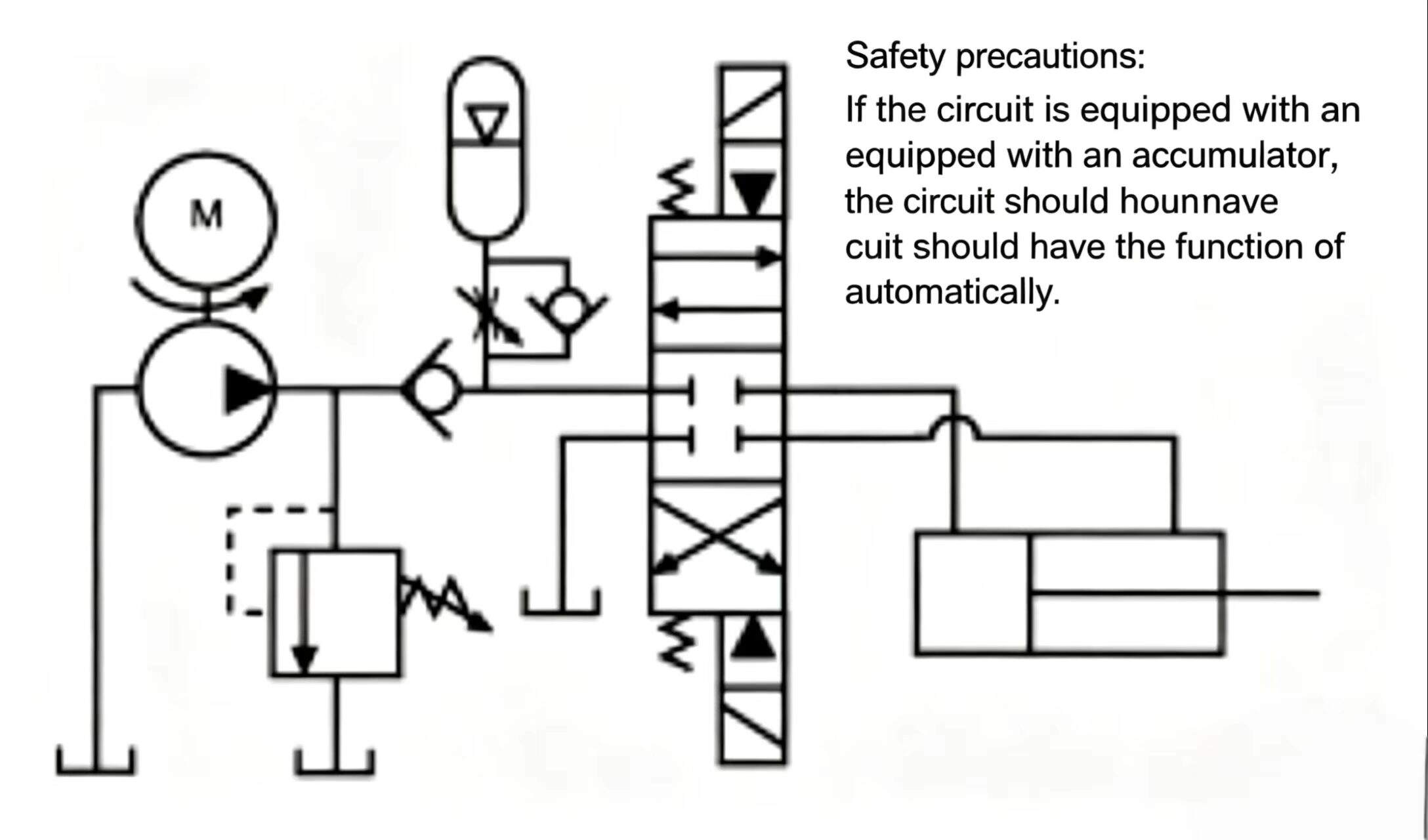
ในอีกการใช้งานหนึ่ง กระบอกสูบทำงานที่ติดตั้งใกล้เตาหลอมจะสัมผัสกับอุณหภูมิแวดล้อมสูง ทำให้น้ำมันขยายตัวเนื่องจากความร้อน แอคคิวมูเลเตอร์จะดูดซับปริมาตรที่เพิ่มขึ้นนี้ และรักษาระดับแรงดันให้คงที่ค่อนข้างสม่ำเสมอ หากไม่มีแอคคิวมูเลเตอร์ แรงดันในท่อจะเพิ่มขึ้นอย่างไม่สามารถควบคุมได้ และอาจทำให้โครงสร้างชิ้นส่วน ท่อ หรือข้อต่อแตกหัก
รูปที่ 8-10 แอคคิวมูเลเตอร์สำหรับรักษาระดับแรงดัน (ด้านบน) รักษาระดับแรงดันในสาขาวงจรหนึ่งไว้ ในขณะที่ปั๊มให้บริการอีกสาขาหนึ่ง (ด้านล่าง) ดูดซับการเปลี่ยนแปลงปริมาตรที่เกิดจากการขยายตัวของน้ำมันเนื่องจากความร้อนใกล้แหล่งความร้อน
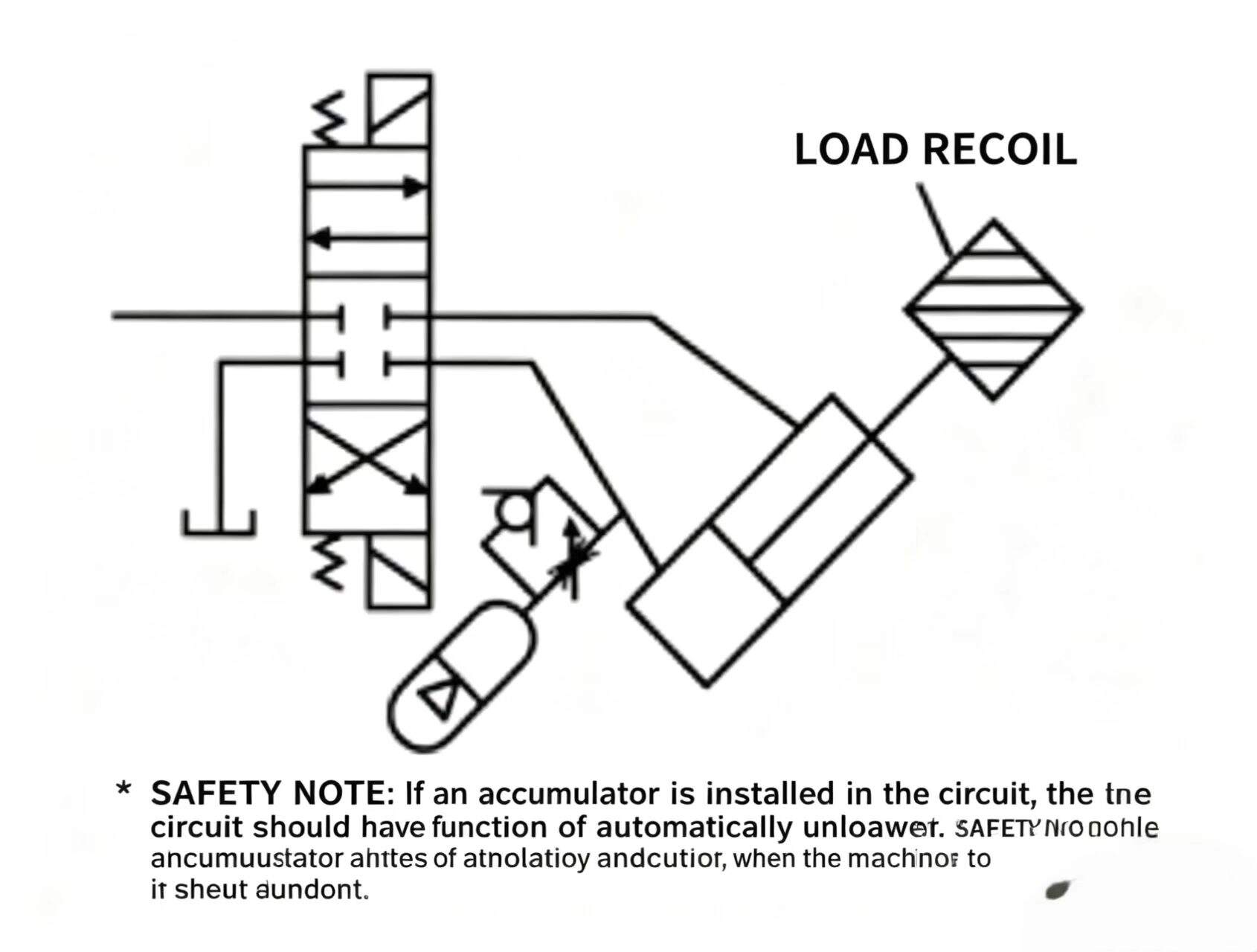
ตัวเก็บพลังงานของเหลว/ก๊าซสามารถใช้ดูดซับแรงกระแทกในระบบได้เช่นกัน แรงกระแทกในระบบไฮดรอลิกอาจเกิดจากความเฉื่อยของโหลดที่เชื่อมต่อกับกระบอกสูบหรือมอเตอร์ หรือจากการตัดการไหลอย่างฉับพลัน หรือการสลับทิศทางของวาล์วอย่างรวดเร็ว ซึ่งทำให้เกิดแรงกระแทกจากความเฉื่อยของของเหลว ตัวเก็บพลังงานที่ติดตั้งในวงจรสามารถดูดซับแรงกระแทกบางส่วนและป้องกันไม่ให้แรงกระแทกแพร่กระจายไปทั่วทั้งระบบ
แรงกลภายนอกยังสามารถสร้างแรงกระแทกไฮดรอลิกได้อีกด้วย โหลดที่เชื่อมต่อกับกระบอกสูบไฮดรอลิกซึ่งมีแนวโน้มที่จะเด้งกลับจะดันลูกสูบกลับเข้าไป ทำให้เกิดแรงกระแทกไฮดรอลิก ตัวเก็บพลังงานที่ติดตั้งอยู่ในสายของกระบอกสูบ หากถูกชาร์จอย่างถูกต้อง จะช่วยลดผลกระทบจากแรงกระแทกได้ แต่หากถูกชาร์จไม่ถูกต้อง ก็อาจทำให้เกิดความดันเกินได้เช่นกัน
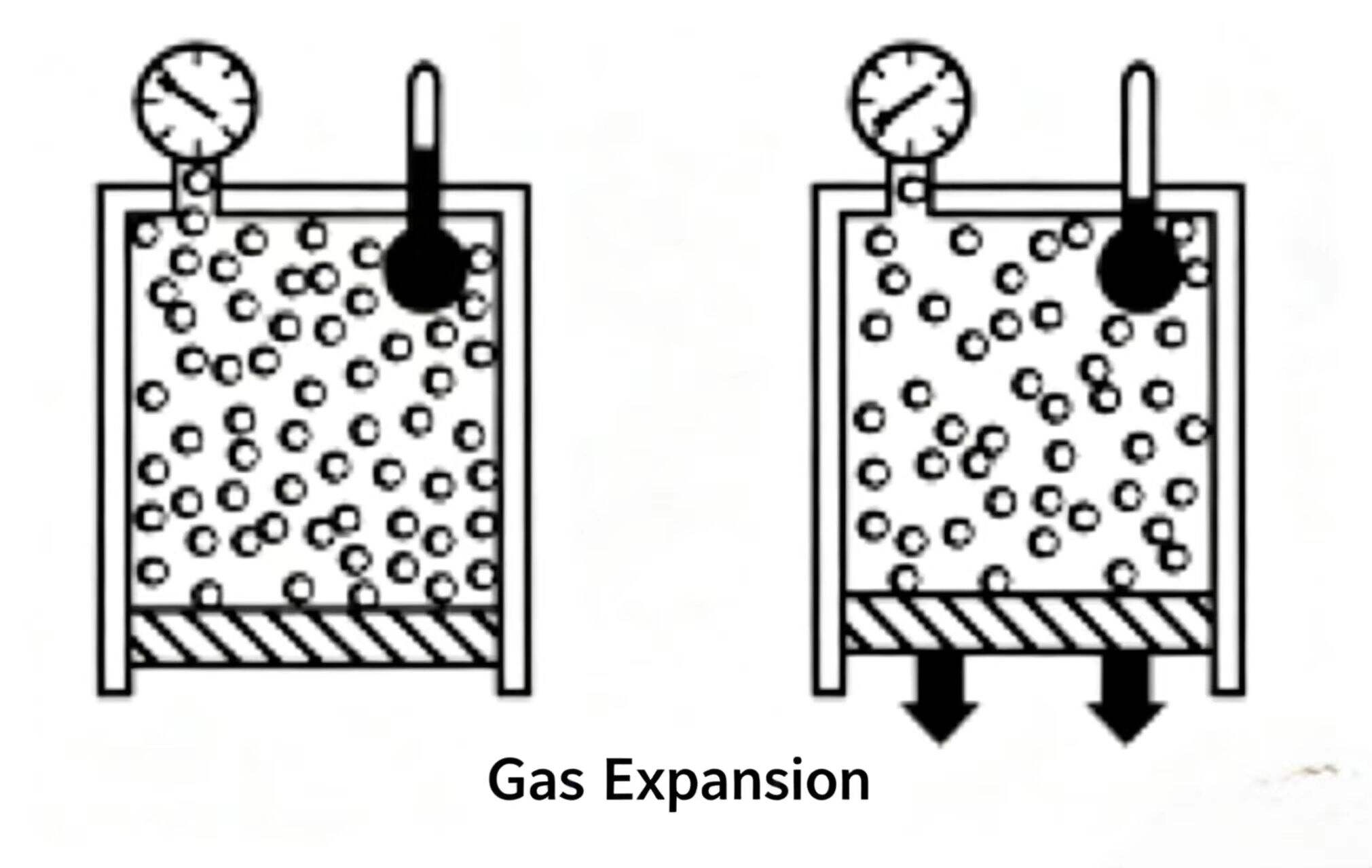
เนื่องจากแอคคิวมูเลเตอร์แบบของเหลว/ก๊าซใช้ก๊าซที่ถูกอัดให้ความดันเพื่อเก็บความดันน้ำมัน ก๊าซจึงมีผลต่อประสิทธิภาพของแอคคิวมูเลเตอร์ เมื่อชาร์จแอคคิวมูเลเตอร์แบบของเหลว/ก๊าซ ก๊าซจะถูกอัดให้หดตัวและอุณหภูมิสูงขึ้น ภายใต้ความดันคงที่ ก๊าซที่ร้อนจะมีปริมาตรมากกว่าก๊าซที่เย็น
กระบวนการไอโซเทอร์มอล (Isothermal Process) หมายถึงสถานะการดำเนินงานของแอคคิวมูเลเตอร์เมื่ออุณหภูมิของก๊าซคงที่ ในระหว่างการชาร์จ กระบวนการไอโซเทอร์มอลหมายความว่าก๊าซถูกอัดอย่างช้าพอที่ความร้อนทั้งหมดที่เกิดจากการอัดจะถูกถ่ายโอนออกอย่างสมบูรณ์ ขณะที่กระบวนการอะเดียบาติก (Adiabatic Process) หมายถึงสถานะการดำเนินงานของแอคคิวมูเลเตอร์เมื่ออุณหภูมิของก๊าซเปลี่ยนแปลง ในระหว่างการชาร์จ กระบวนการอะเดียบาติกหมายความว่าก๊าซถูกอัดอย่างรวดเร็วจนความร้อนทั้งหมดถูกกักเก็บไว้ภายใน
สำหรับแอคคิวมูเลเตอร์แบบของเหลว/ก๊าซที่ชาร์จถึงความดันเดียวกัน กระบวนการไอโซเทอร์มอลสามารถเก็บน้ำมันได้มากกว่ากระบวนการอะเดียบาติก
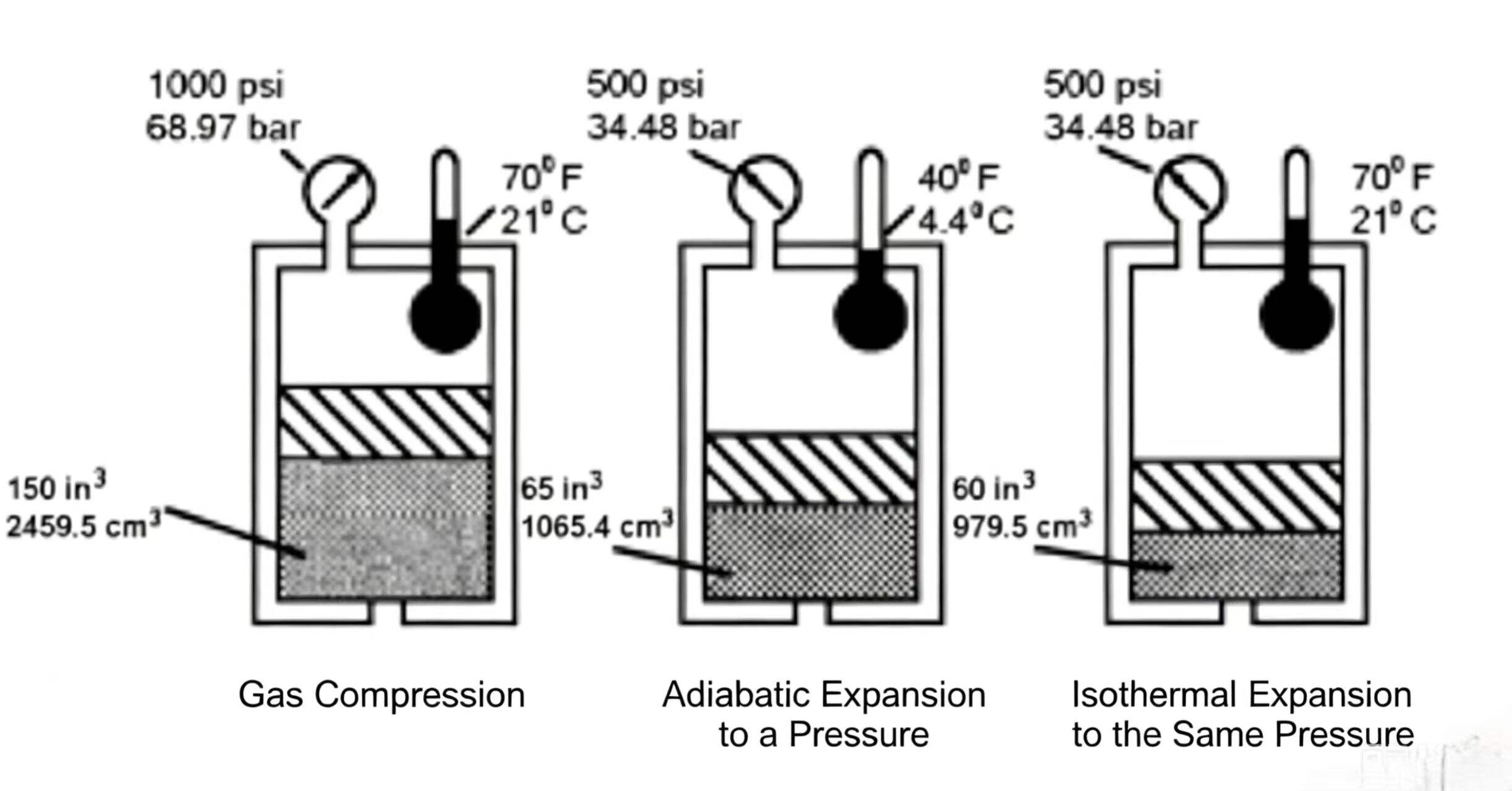
ตัวอย่างเชิงตัวเลข: แอคคิวมูเลเตอร์แบบลูกสูบมีความดันก๊าซเริ่มต้นที่ 500 ปอนด์ต่อตารางนิ้ว (34.48 บาร์) และอุณหภูมิ 70°F (21°C) หากชาร์จจนถึงความดัน 1,000 ปอนด์ต่อตารางนิ้ว (68.97 บาร์) โดยกระบวนการอะเดียบาติก (เร็ว) อุณหภูมิและความดันจะเพิ่มขึ้นพร้อมกัน เมื่อถึงความดัน 1,000 ปอนด์ต่อตารางนิ้ว (68.97 บาร์) น้ำมันจะหยุดไหลเข้า ขณะนั้นอุณหภูมิคือ 150°F (65.6°C) และแอคคิวมูเลเตอร์เก็บน้ำมันได้ 135 ลูกบาศก์นิ้ว (2,215.65 ลูกบาศก์เซนติเมตร) แต่หากชาร์จแบบไอโซเทอร์มอล (ช้า) อุณหภูมิจะคงที่ที่ 70°F (21°C) ตลอดกระบวนการ เมื่อถึงความดัน 1,000 ปอนด์ต่อตารางนิ้ว (68.97 บาร์) น้ำมันจะหยุดไหลเข้า และแอคคิวมูเลเตอร์เก็บน้ำมันได้ 150 ลูกบาศก์นิ้ว (2,458.5 ลูกบาศก์เซนติเมตร)
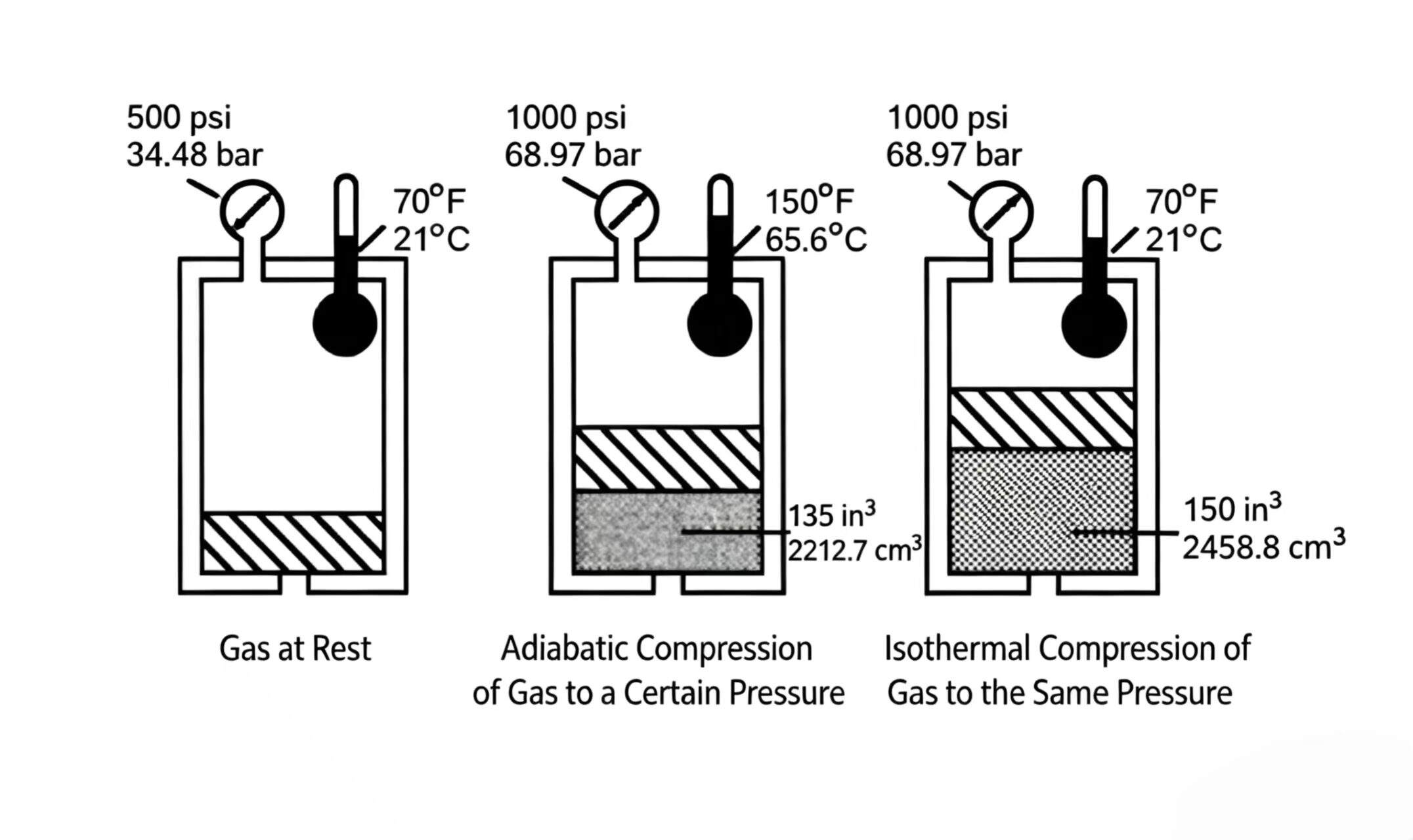
รูปที่ 8-12 การชาร์จแบบไอโซเทอร์มอลเทียบกับการชาร์จแบบอะเดียบาติก การชาร์จแบบช้า (ไอโซเทอร์มอล) จะเก็บน้ำมันได้มากกว่าการชาร์จแบบเร็ว (อะเดียบาติก) ที่ความดันสุดท้ายเท่ากัน เนื่องจากอุณหภูมิยังคงต่ำกว่า ทำให้ก๊าซใช้พื้นที่น้อยลง
ระหว่างการปล่อยน้ำมัน แก๊สจะขยายตัวและเย็นลง ที่ความดันคงที่ แก๊สที่เย็นกว่าจะมีปริมาตรน้อยกว่าแก๊สที่ร้อนกว่า ในทางปฏิบัติ การทำงานของแอคคิวมูเลเตอร์โดยทั่วไปเป็นแบบอะเดียแบติก (ไม่ใช่ไอโซเทอร์มอล) ในส่วนต่อไปนี้ ประเด็นหลักที่พิจารณาไม่ใช่ปริมาณน้ำมันสูงสุดที่แอคคิวมูเลเตอร์สามารถเก็บได้ แต่เป็นปริมาณน้ำมันที่มันปล่อยออกมาก่อนที่ความดันจะลดลงถึงระดับที่ต่ำกว่า ซึ่งขึ้นอยู่กับความดันเริ่มต้น (precharge pressure) เป็นอย่างมาก
เมื่อแอคคิวมูเลเตอร์ว่างเปล่าจากน้ำมันอย่างสมบูรณ์ ความดันของแก๊สที่บรรจุเข้าไปในแอคคิวมูเลเตอร์แบบของเหลว/แก๊ส จะเรียกว่า ความดันเริ่มต้น ความดันนี้มีผลอย่างมากต่อปริมาตรที่ใช้งานได้จริง และประสิทธิภาพในการดูดซับแรงกระแทกของแอคคิวมูเลเตอร์
แอคคิวมูเลเตอร์สำหรับของเหลว/ก๊าซ ที่ใช้ในการสร้างการไหลของระบบหรือรักษาความดัน มักทำงานอยู่ระหว่างความดันใช้งานสูงสุดและต่ำสุด เมื่อแอคคิวมูเลเตอร์ถูกเติมน้ำมันจนเต็ม จะทำให้ความดันใช้งานสูงสุดเกิดขึ้น เมื่อมีความต้องการใช้งาน ความดันใช้งานจะลดลง แอคคิวมูเลเตอร์จึงปล่อยน้ำมันออกจนถึงความดันต่ำสุดที่กำหนด ปริมาตรน้ำมันที่แอคคิวมูเลเตอร์ปล่อยออกในช่วงความดันใช้งานสูงสุดถึงต่ำสุดนี้เรียกว่า ปริมาตรที่มีประสิทธิภาพ
ความดันเริ่มต้น (Precharge pressure) มีผลต่อปริมาตรที่มีประสิทธิภาพ ตัวอย่างเช่น แอคคิวมูเลเตอร์สำหรับของเหลว/ก๊าซ ขนาด 231 ลูกบาศก์นิ้ว (3,786 ลูกบาศก์เซนติเมตร) ในระบบที่ใช้ปั๊มขนาดเล็กในการเติมน้ำมันจนถึงความดันระบบสูงสุดที่ 2,000 ปอนด์ต่อตารางนิ้ว (137.9 บาร์) เพื่อจ่ายการไหล ความดันจะลดลงจนถึง 1,500 ปอนด์ต่อตารางนิ้ว (103.4 บาร์) ความดันเริ่มต้นที่เลือกใช้จะเป็นตัวกำหนดปริมาณน้ำมันที่แอคคิวมูเลเตอร์จ่ายให้กับระบบ
จากตารางประสิทธิภาพ แอคคิวมูเลเตอร์ขนาด 231 ลูกบาศก์นิ้ว (3,786 ลูกบาศก์เซนติเมตร) ที่มีแรงดันเริ่มต้น (precharge) 100 psi (6.89 บาร์) สามารถเก็บน้ำมันได้ 210 ลูกบาศก์นิ้ว (3,441.9 ลูกบาศก์เซนติเมตร) ที่แรงดัน 1,000 psi ภายใต้สภาวะอุณหภูมิคงที่ (isothermal charge) (ขีดจำกัดบน = ค่าภายใต้สภาวะ isothermal) ที่แรงดัน 1,500 psi (103.4 บาร์) จะเก็บน้ำมันได้ 202 ลูกบาศก์นิ้ว (3,310.8 ลูกบาศก์เซนติเมตร) ซึ่งให้ปริมาตรน้ำมันที่ปล่อยออกได้ 8 ลูกบาศก์นิ้ว (131 ลูกบาศก์เซนติเมตร) ระหว่างสองระดับแรงดันนี้ แอคคิวมูเลเตอร์ที่มีแรงดันเริ่มต้นต่ำนี้สามารถเก็บน้ำมันได้มาก แต่ปล่อยออกได้น้อยมาก
เมื่อเพิ่มแรงดันเริ่มต้นเป็น 1,000 psi (68.96 บาร์) แอคคิวมูเลเตอร์จะเก็บน้ำมันได้ 93 ลูกบาศก์นิ้ว (1,524.3 ลูกบาศก์เซนติเมตร) ที่แรงดัน 2,000 psi (137.9 บาร์) และเก็บได้ 59.5 ลูกบาศก์นิ้ว (975 ลูกบาศก์เซนติเมตร) ที่แรงดัน 1,500 psi (103.4 บาร์) จึงสามารถปล่อยน้ำมันออกได้ 33.5 ลูกบาศก์นิ้ว (594.1 ลูกบาศก์เซนติเมตร) แรงดันเริ่มต้นที่สูงขึ้นนี้ทำให้เก็บน้ำมันได้น้อยลง แต่ปล่อยออกได้มากขึ้นอย่างมาก สำหรับแรงดันเริ่มต้นที่ 1,400 psi (96.6 บาร์) ปริมาตรน้ำมันที่เก็บได้จะต่ำสุด แต่ปริมาตรน้ำมันที่ปล่อยออกได้จะสูงสุด
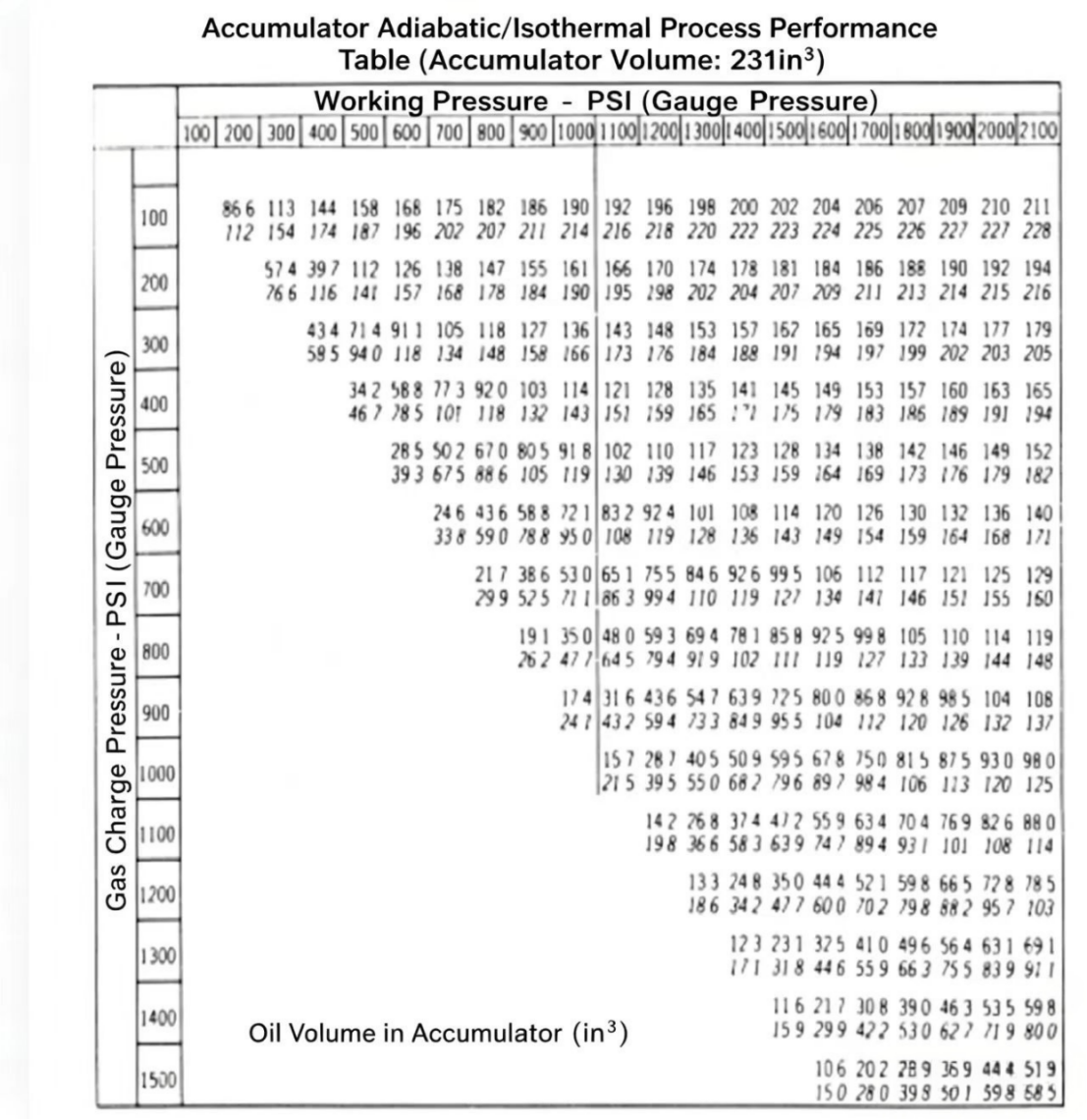
รูปที่ 8-13 ตารางประสิทธิภาพของแอคคิวมูเลเตอร์ (ความจุ 231 ลูกบาศก์นิ้ว) แรงดันเริ่มต้นที่สูงขึ้นจะทำให้ปล่อยน้ำมันออกได้มากขึ้นต่อรอบการทำงานภายในช่วงแรงดันที่กำหนดไว้ แต่จะเก็บน้ำมันรวมได้น้อยลง ควรเลือกแรงดันเริ่มต้นตามปริมาตรที่ใช้งานได้จริง (effective volume) ที่ต้องการ ไม่ใช่ตามความจุรวม (total capacity)
ปริมาตรการจ่ายที่มีประสิทธิภาพของแอคคิวมูเลเตอร์ควรควบคุมด้วยอัตราการไหล สำหรับการรักษาความดัน อัตราการไหลที่ควบคุมจะถูกกำหนดโดยอัตราการรั่วซึมที่ต้องชดเชย สำหรับแอคคิวมูเลเตอร์ที่ใช้จ่ายน้ำมันความดัน เมื่อวาล์วทิศทางด้านปลายน้ำเปลี่ยนตำแหน่ง ปริมาตรการจ่ายที่มีประสิทธิภาพจะเร็วเกินไป ด้วยเหตุนี้ แอคคิวมูเลเตอร์เหล่านี้มักติดตั้งวาล์วควบคุมอัตราการไหลและวาล์วตรวจสอบแบบเบี่ยงเบน (bypass check valves) ที่พอร์ตเข้า/ออก
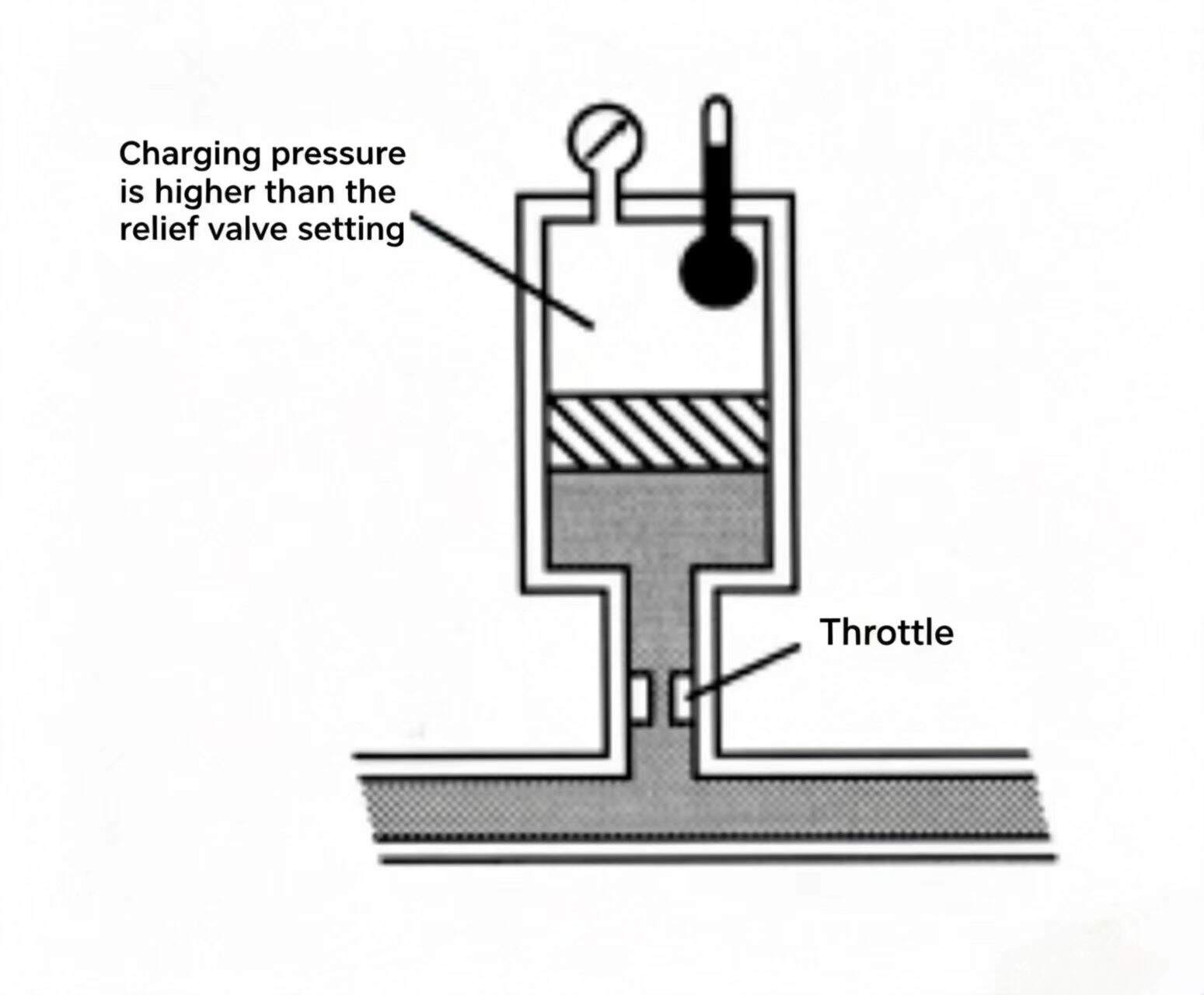
เมื่อใช้แอคคิวมูเลเตอร์ที่ทำงานด้วยของไหล/ก๊าซเป็นตัวดูดซับแรงกระแทก ความดันเริ่มต้น (precharge) มักตั้งไว้สูงกว่าความดันการทำงานสูงสุดในวงจรเพียงเล็กน้อย (ตั้งไว้ประมาณ 100 psi / 6.896 bar สูงกว่าความดันการทำงานสูงสุด ซึ่งกำหนดโดยการตั้งค่าของวาล์วปล่อยแรงดัน) หากความดันการทำงานสูงสุดถูกกำหนดโดยวาล์วปล่อยแรงดัน ความดันเริ่มต้นสามารถตั้งไว้สูงกว่าค่าการตั้งค่าของวาล์วปล่อยแรงดันประมาณ 100 psi
ความดันเริ่มต้น (precharge pressure) ของแอคคิวมูเลเตอร์ที่เก็บของเหลว/ก๊าซมีผลต่อความสามารถในการดูดซับแรงกระแทก ภายในระบบไฮดรอลิก แรงกระแทกเกิดจากแรงกลภายนอกที่กระทำต่อลูกสูบหรือมอเตอร์ ส่งผลให้ความดันเพิ่มขึ้นอย่างรวดเร็ว หรือเกิดจากความเฉื่อยของของไหลเมื่อวาล์วไฮดรอลิกปิดลงอย่างกะทันหัน
แอคคิวมูเลเตอร์สามารถดูดซับน้ำมันส่วนหนึ่งที่เกิดจากแรงกระแทกซึ่งมันสามารถยัดเยียดและถ่ายโอนได้ ท่อที่ติดตั้งแอคคิวมูเลเตอร์จะมีลักษณะยืดหยุ่น (compressible) ได้เมื่อความดันสูงกว่าค่าหนึ่งๆ ถ้าความดันเริ่มต้นต่ำเกินไป แอคคิวมูเลเตอร์จะเก็บน้ำมันไว้บางส่วนแล้วก่อนที่แรงกระแทกจะมาถึง จึงสามารถดูดซับได้เพียง 4 ลูกบาศก์นิ้ว (65.6 ลูกบาศก์เซนติเมตร) เท่านั้น หากความดันเริ่มต้นอยู่ที่ 2,500 psi (172.4 บาร์) ซึ่งสูงเกินไป ความดันจะเพิ่มขึ้นจนใกล้เคียง 2,800 psi (193 บาร์) ก่อนที่จะดูดซับน้ำมันได้ 4 ลูกบาศก์นิ้ว ดังนั้น สำหรับตัวดูดซับแรงกระแทก (shock absorbers) ความดันเริ่มต้นจึงมีความสำคัญอย่างยิ่ง
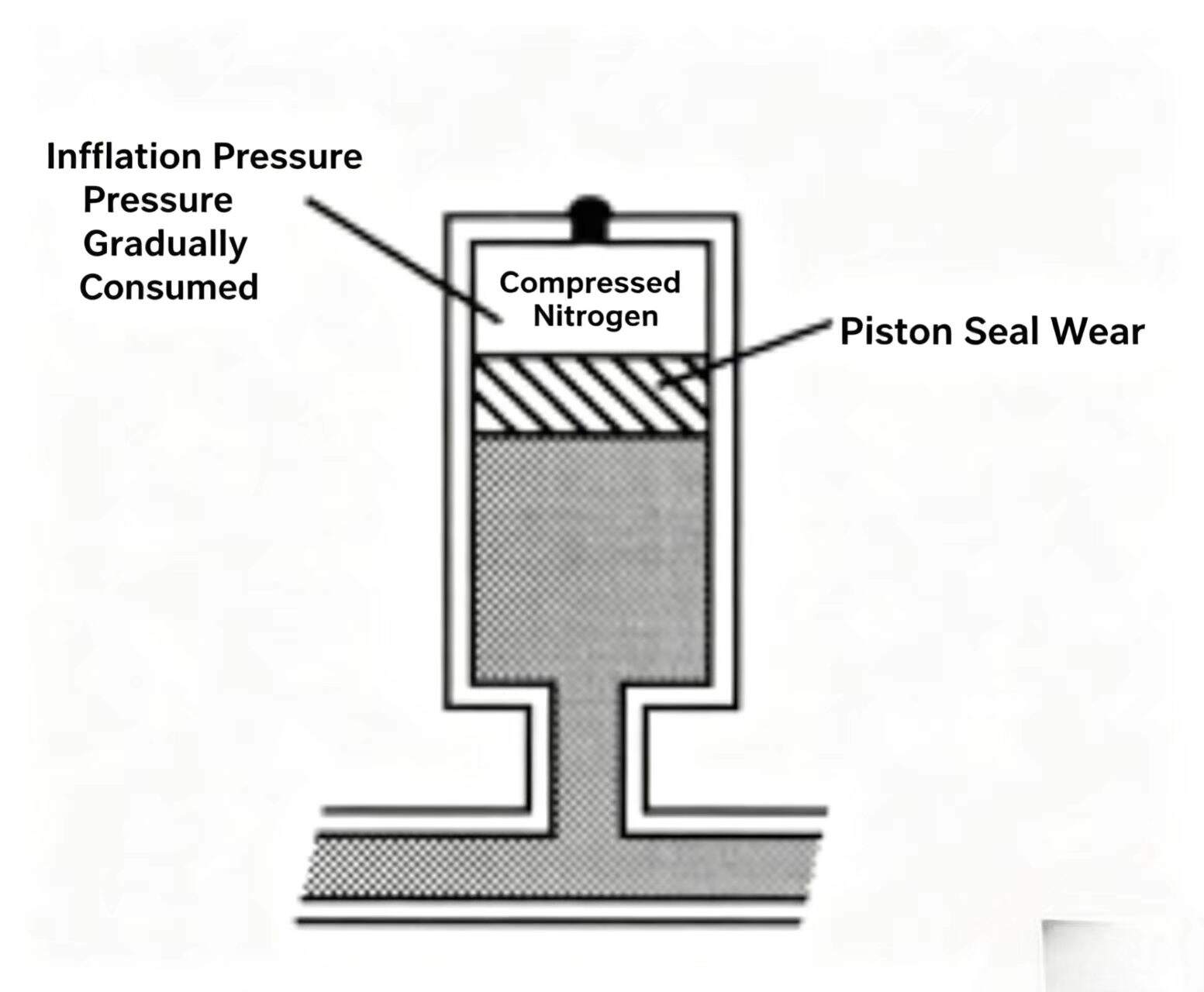
แอคคิวมูเลเตอร์สำหรับของไหล/ก๊าซจะถูกชาร์จก๊าซที่ความดันเริ่มต้นที่เหมาะสมเพียงครั้งเดียว ซึ่งหมายความว่าความดันเริ่มต้นนี้ไม่สามารถรักษาไว้ได้อย่างถาวร เมื่อแอคคิวมูเลเตอร์ทำงาน ก๊าซที่ถูกบีบอัดอาจรั่วผ่านวาล์วก๊าซ — อาจเกิดจากความล้มเหลวของวาล์วก๊าซ หรือการปิดผนึกที่ไม่ดี หรือปัญหาเกี่ยวกับส่วนปลายของแกนวาล์วทรงกรวยที่สัมผัสกับที่นั่งวาล์ว นอกจากนี้ ความดันก๊าซยังลดลงอย่างค่อยเป็นค่อยไประหว่างการปล่อยน้ำมันในกรณีของแอคคิวมูเลเตอร์แบบถุงยางและแบบไดอะแฟรม — โดยปกติเหตุการณ์นี้เกิดขึ้นอย่างรุนแรงจนทำให้วัสดุไดอะแฟรมยางสังเคราะห์แตกหัก ส่วนแอคคิวมูเลเตอร์แบบลูกสูบ ในระหว่างกระบวนการปล่อยน้ำมัน ก๊าซที่ถูกชาร์จอาจรั่วผ่านซีลที่สึกหรอจากบริเวณลูกสูบ การสูญเสียความดันเริ่มต้นอย่างค่อยเป็นค่อยไปอาจบ่งชี้ว่าแอคคิวมูเลเตอร์แบบลูกสูบมีการสึกหรอในระดับหนึ่ง
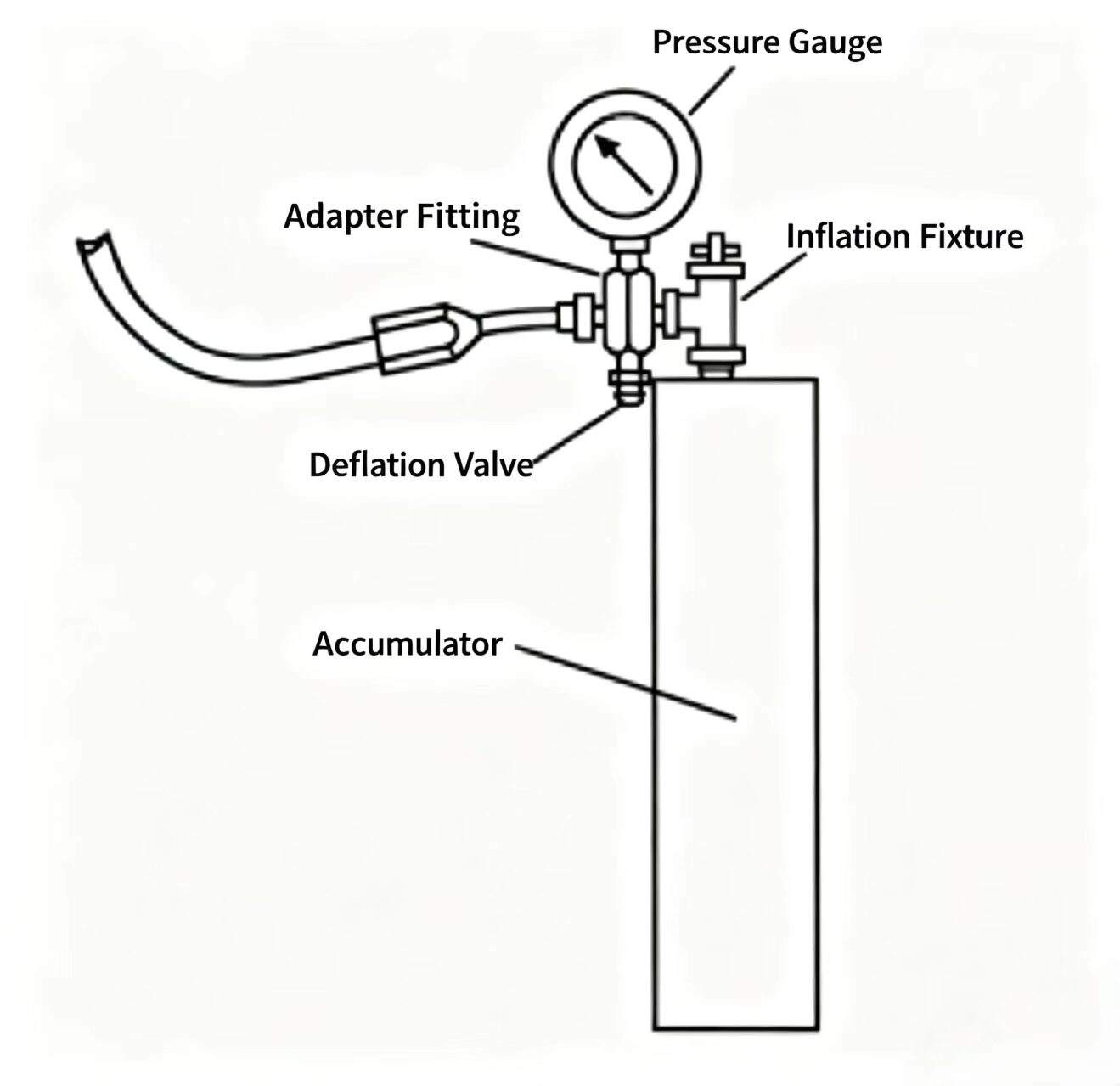
ความดันก่อนชาร์จที่ถูกต้องมีความสำคัญอย่างยิ่งต่อประสิทธิภาพของแอคคิวมูเลเตอร์แบบของเหลว/ก๊าซ ดังนั้นจึงควรตรวจสอบเป็นประจำ จำเป็นต้องใช้อุปกรณ์ชาร์จที่ติดตั้งมาพร้อมเกจวัดความดันเพื่อตรวจสอบความดันก่อนชาร์จ อุปกรณ์นี้ประกอบด้วยหัวชาร์จ (charging chuck), วาล์วระบายอากาศ (bleed valve) และเกจวัดความดันเป็นหลัก
ขั้นตอนการตรวจสอบ: ปล่อยน้ำมันทั้งหมดออกจากแอคคิวมูเลเตอร์ ถอดฝาครอบป้องกันออก (โดยทั่วไปจะอยู่ที่วาล์วก๊าซบริเวณด้านบน) เมื่อดึงคันโยกของหัวชาร์จออกให้สุด ให้ตรวจสอบว่าวาล์วระบายอากาศอยู่ในตำแหน่งปิด จากนั้นเชื่อมต่อหัวชาร์จเข้ากับวาล์วก๊าซของแอคคิวมูเลเตอร์ แล้วขันน็อตปีกของหัวชาร์จให้แน่น เพื่อให้มั่นใจว่ามีการเชื่อมต่อที่มั่นคงกับวาล์วก๊าซ จากนั้นหมุนสกรูของหัวชาร์จเข้าไปจนกระทั่งกดแกนกลางของวาล์วก๊าซของแอคคิวมูเลเตอร์ให้แน่นที่สุด แล้วอ่านค่าความดันจากเกจ — ค่านี้คือความดันก่อนชาร์จของแอคคิวมูเลเตอร์
หากการชาร์จล่วงหน้าถูกต้อง ให้หมุนที่ด้ามจับของชัคออกเพื่อปิดวาล์วแก๊สสะสม แล้วเปิดวาล์วระบายความดันเพื่อลดแรงดันของอุปกรณ์ชาร์จ คลายสลักเกลียวปีกนกของชัค ถอดอุปกรณ์ออกจากถังสะสม และติดตั้งฝาครอบป้องกันวาล์วแก๊สกลับเข้าไปใหม่
หากแรงดันเริ่มต้น (precharge) สูงเกินไป ให้เปิดวาล์วระบายความดัน (bleed valve) เพื่อปล่อยความดันส่วนเกินออก หากต้องการเพิ่มแรงดันเริ่มต้น ให้ดึงที่จับของชุดชาร์จ (chuck handle) ออกก่อนเพื่อปิดวาล์วแก๊สของแอคคิวมูเลเตอร์ จากนั้นเปิดวาล์วระบายความดันเพื่อลดความดันของอุปกรณ์ชาร์จ แล้วจึงปิดวาล์วระบายความดัน ต่อกล่องชาร์จเข้ากับถังไนโตรเจน หมุนที่จับของชุดชาร์จเข้าไปจนกระทั่งกดแกนกลางของวาล์วแก๊สของแอคคิวมูเลเตอร์ให้แน่นสนิท จากนั้นเปิดวาล์วถังไนโตรเจนเพื่อให้แก๊สไหลเข้าสู่แอคคิวมูเลเตอร์อย่างช้าๆ เมื่อมาตรวัดแสดงแรงดันที่ต้องการแล้ว ให้ปิดวาล์วแก๊ส หลังจากที่มาตรวัดแสดงแรงดันเริ่มต้นที่ถูกต้องแล้ว ให้ปิดวาล์วถังไนโตรเจน ดึงที่จับของชุดชาร์จออกเพื่อปิดวาล์วแก๊สของแอคคิวมูเลเตอร์ เปิดวาล์วระบายความดัน แล้วจึงถอดท่อชาร์จแบบยืดหยุ่นและอุปกรณ์ชาร์จออก
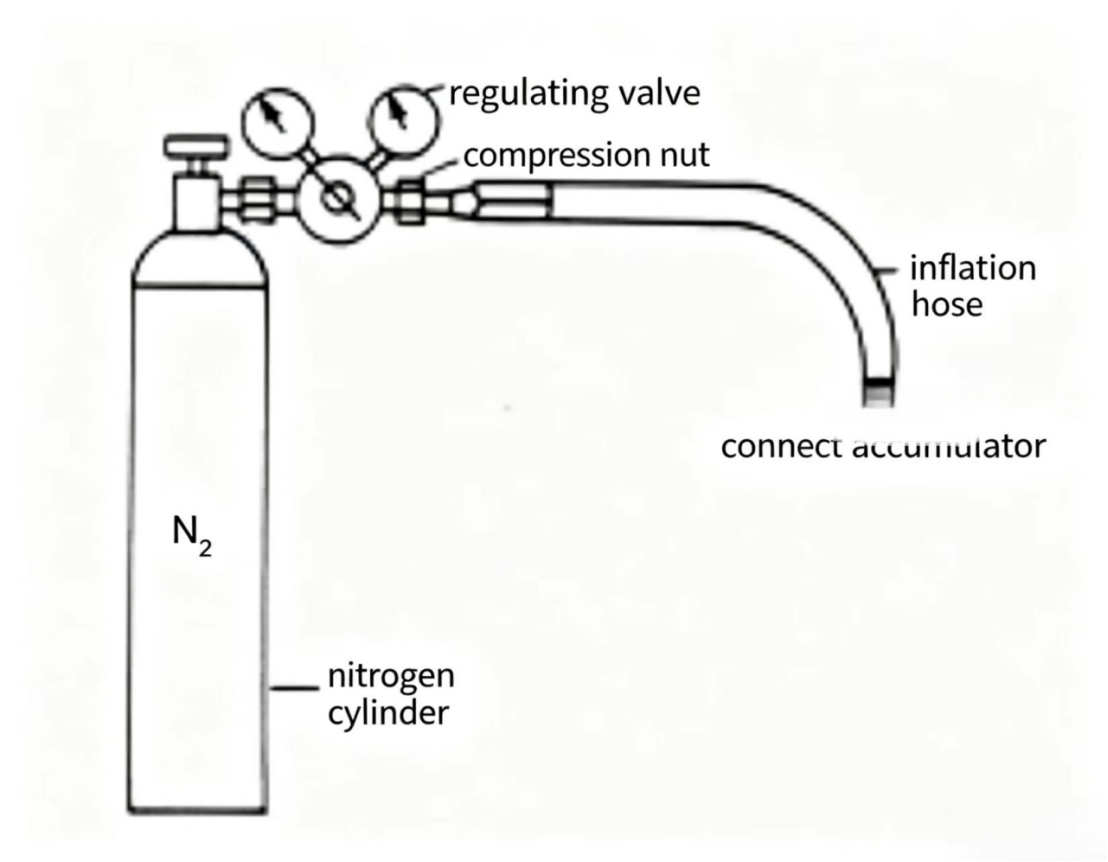
รูปที่ 8-15 การตรวจสอบและปรับแรงดันเริ่มต้น (precharge) ของแอคคิวมูเลเตอร์ (ด้านบน) ซีลของลูกสูบสึกหรอทำให้แรงดันเริ่มต้นลดลงอย่างค่อยเป็นค่อยไป (ด้านล่าง) ชุดอุปกรณ์ชาร์จไนโตรเจนมาตรฐาน — ใช้ไนโตรเจนแห้งเท่านั้น ห้ามใช้อากาศอัดเด็ดขาด
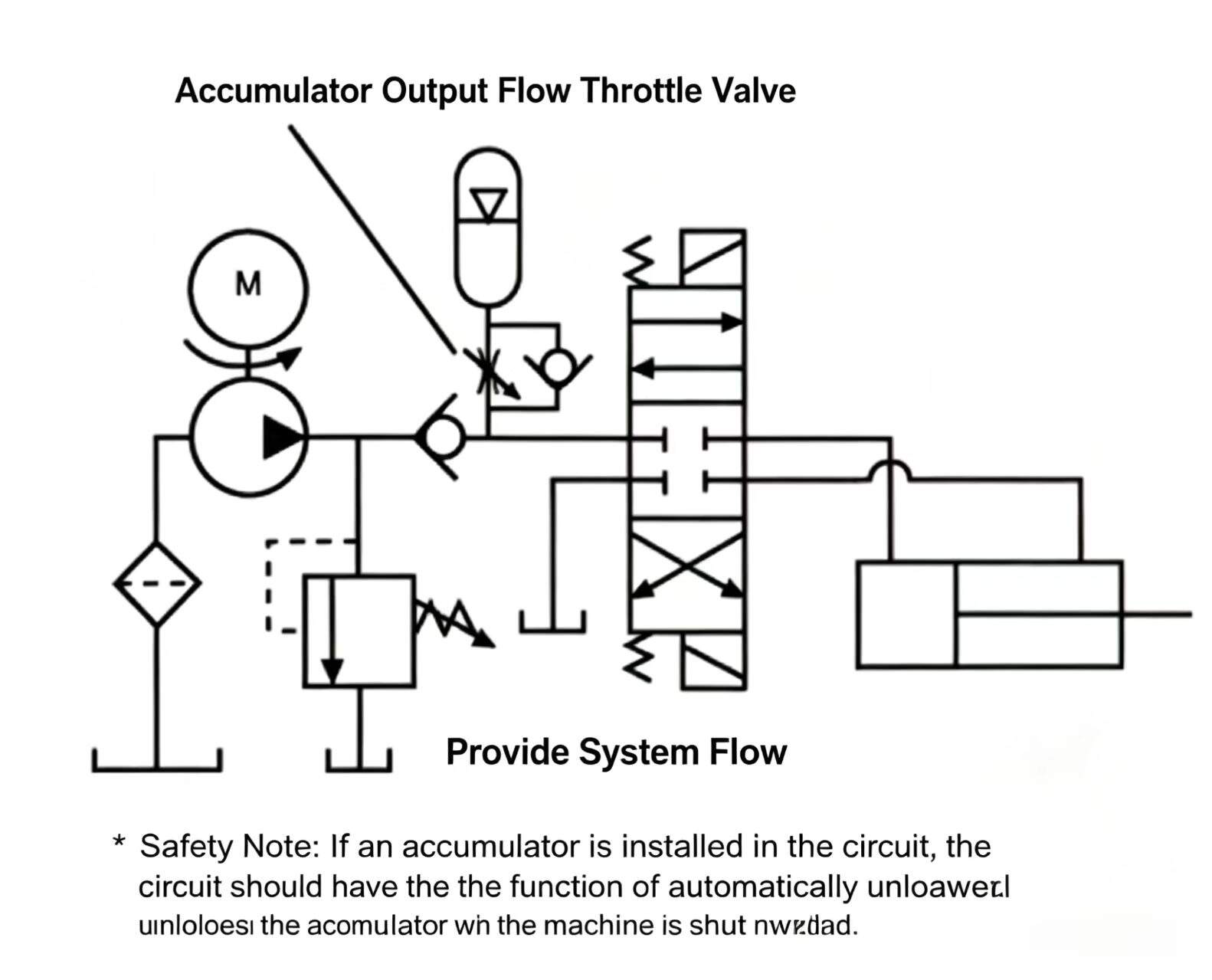
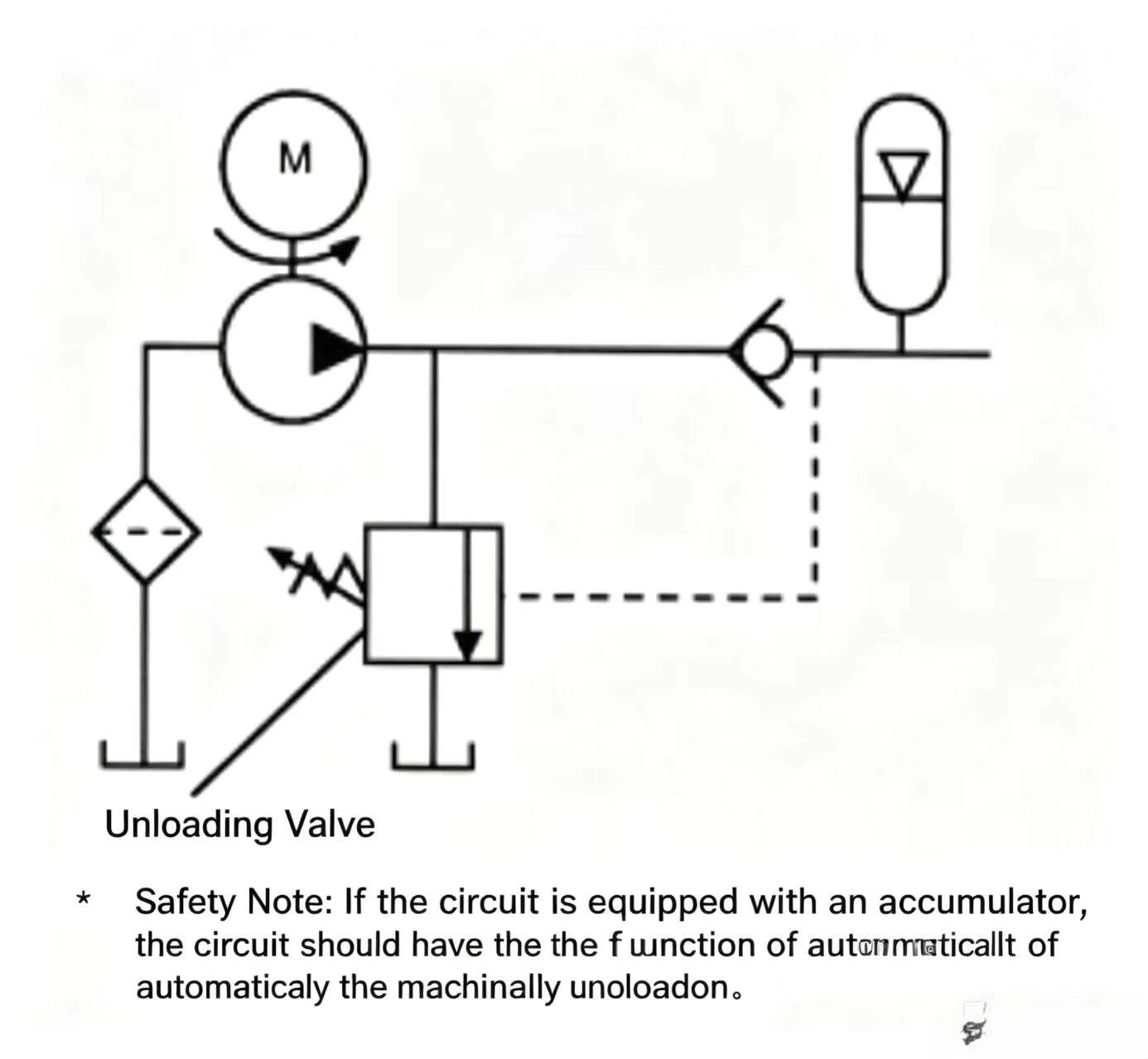
ในวงจรไฮดรอลิกทั่วไปที่มีแอคคิวมูเลเตอร์ เมื่อแอคคิวมูเลเตอร์ถูกชาร์จเต็มแล้ว และไม่มีส่วนใดของระบบทำงานอยู่ กระแสไหลของปั๊ม/มอเตอร์ควรปลดแรงดันเข้าสู่ถังเก็บน้ำมันที่ความดันต่ำที่สุดเท่าที่จะเป็นไปได้ ในวงจรที่แสดงไว้ใช้วาล์วปลดแรงดัน (dump valve) เพื่อปลดแรงดัน เมื่อความดันในแอคคิวมูเลเตอร์เพิ่มขึ้นจนถึงค่าที่ตั้งไว้สำหรับวาล์วปลดแรงดัน วาล์วปลดแรงดันจะเปิดออกและเปลี่ยนทิศทางกระแสไหลของปั๊มเข้าสู่ถังเก็บน้ำมัน
โดยทั่วไปแล้ว การปลดแรงดันแบบนี้สามารถคงอยู่ได้เพียงไม่กี่วินาทีเท่านั้น เนื่องจากมักมีการรั่วไหลเล็กน้อยบริเวณด้านท้ายของวาล์วเช็คเสมอ แอคคิวมูเลเตอร์จึงต้องชดเชยการรั่วไหลนี้ — ความดันจะลดลงอย่างค่อยเป็นค่อยไป — วาล์วปลดแรงดันจะค่อยๆ ปิดลง และช่องเปิดสู่ถังเก็บน้ำมันจะแคบลงเรื่อยๆ จนกระทั่งความดันในแอคคิวมูเลเตอร์ลดลงต่ำกว่าความดันที่ทำให้วาล์วเปิด ขณะที่วาล์วปิดลง ปั๊ม/มอเตอร์จำเป็นต้องสร้างกำลังมากขึ้นเพื่อชาร์จแอคคิวมูเลเตอร์ใหม่ให้ถึงระดับความดันที่ตั้งไว้สำหรับวาล์วปลดแรงดัน
เพื่อให้แน่ใจว่าปั๊ม/มอเตอร์ถูกปลดโหลดอย่างสมบูรณ์ก่อนการชาร์จแอคคิวมูเลเตอร์ใหม่ สามารถใช้สวิตช์ความดันได้ ในวงจรนี้ สวิตช์ความดันจะตรวจจับความดันของแอคคิวมูเลเตอร์ และส่งสัญญาณไฟฟ้าสำหรับการเปิด-ปิดที่จุดความดันที่ตั้งไว้ สัญญาณไฟฟ้านี้จะส่งไปยังวาล์วโซลินอยด์สองทางแบบปกติปิด — วาล์วโซลินอยด์นี้สามารถควบคุมวาล์วปล่อยแรงดันแบบพิโลต์ (pilot-operated relief valve) เพื่อปลดโหลด เมื่อแอคคิวมูเลเตอร์ถูกชาร์จจนถึงค่าความดันที่ตั้งไว้ในสวิตช์ความดัน เรเลย์จะส่งสัญญาณไปยังวาล์วโซลินอยด์เพื่อปลดโหลดวาล์วปล่อยแรงดัน และเปลี่ยนทิศทางการไหลของปั๊ม/มอเตอร์ผ่านวาล์วปล่อยแรงดันเข้าสู่ถังเก็บ
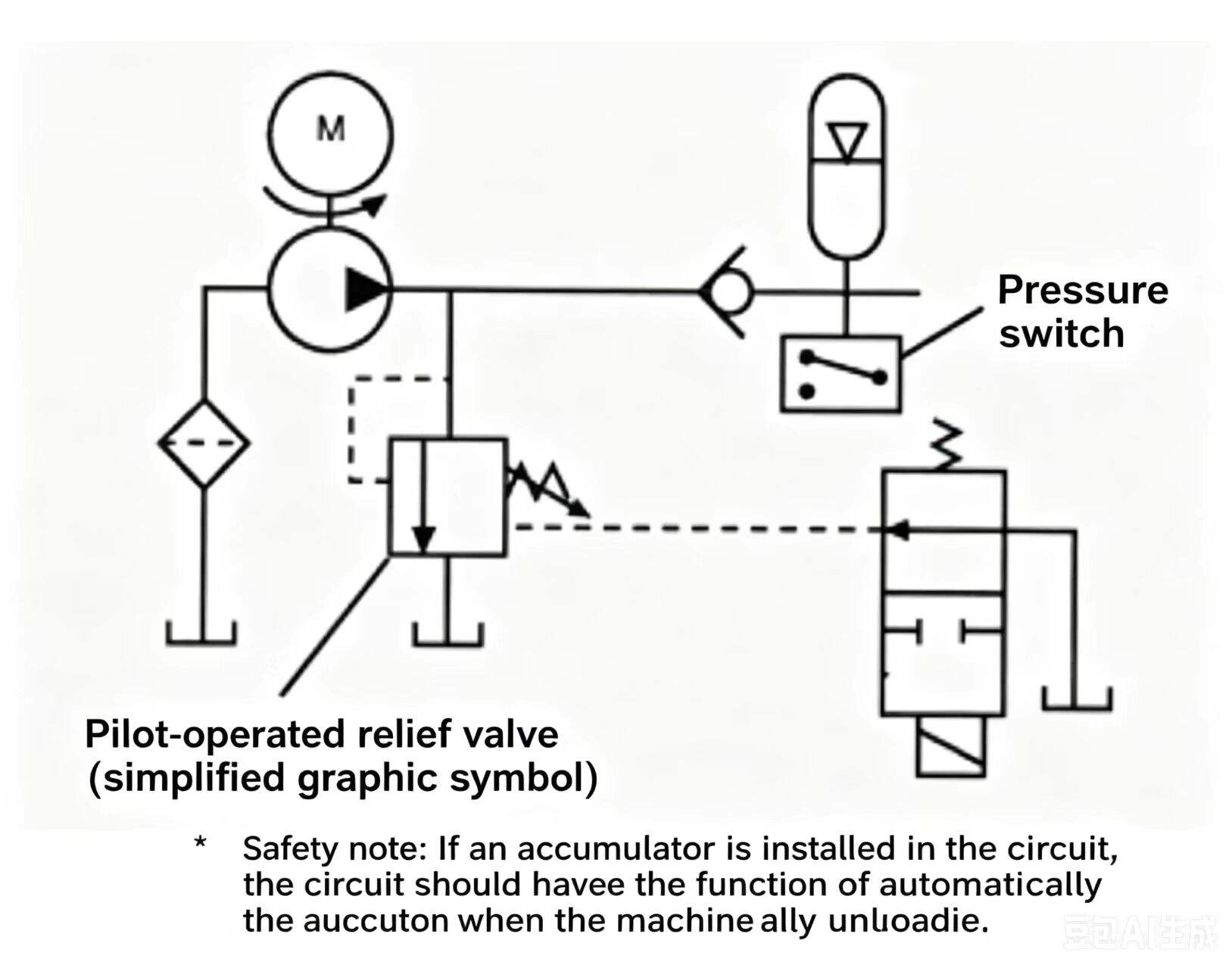
รูปที่ 8-16 วงจรปลดโหลดแอคคิวมูเลเตอร์ (บน) วาล์วปล่อยแบบง่าย — ปลดโหลดเข้าสู่ถังเมื่อแอคคิวมูเลเตอร์ถึงค่าความดันที่ตั้งไว้ แต่มีแนวโน้มเกิดการเปิด-ปิดซ้ำ ๆ (ล่าง) สวิตช์ความดันร่วมกับวาล์วปล่อยแรงดันแบบพิโลต์ — ทำให้ปลดโหลดได้อย่างสมบูรณ์และควบคุมช่วงความดันได้แม่นยำ
หลังจากที่แอคคิวมูเลเตอร์ถูกชาร์จแล้ว วาล์วปล่อยแรงดันแบบความต่างของแรงดัน (differential-pressure unloading valve) สามารถแทนที่สวิตช์ควบคุมแรงดันและวาล์วโซลินอยด์เพื่อปล่อยวาล์วระบายแรงดันและปล่อยภาระของปั๊ม/มอเตอร์ได้ วาล์วปล่อยแรงดันแบบความต่างของแรงดันเป็นวาล์วไฮดรอลิกที่ออกแบบมาโดยเฉพาะสำหรับการใช้งานร่วมกับแอคคิวมูเลเตอร์ โดยตามชื่อที่ระบุ วาล์วนี้ใช้ความต่างของแรงดันในการปล่อยภาระของปั๊ม/มอเตอร์
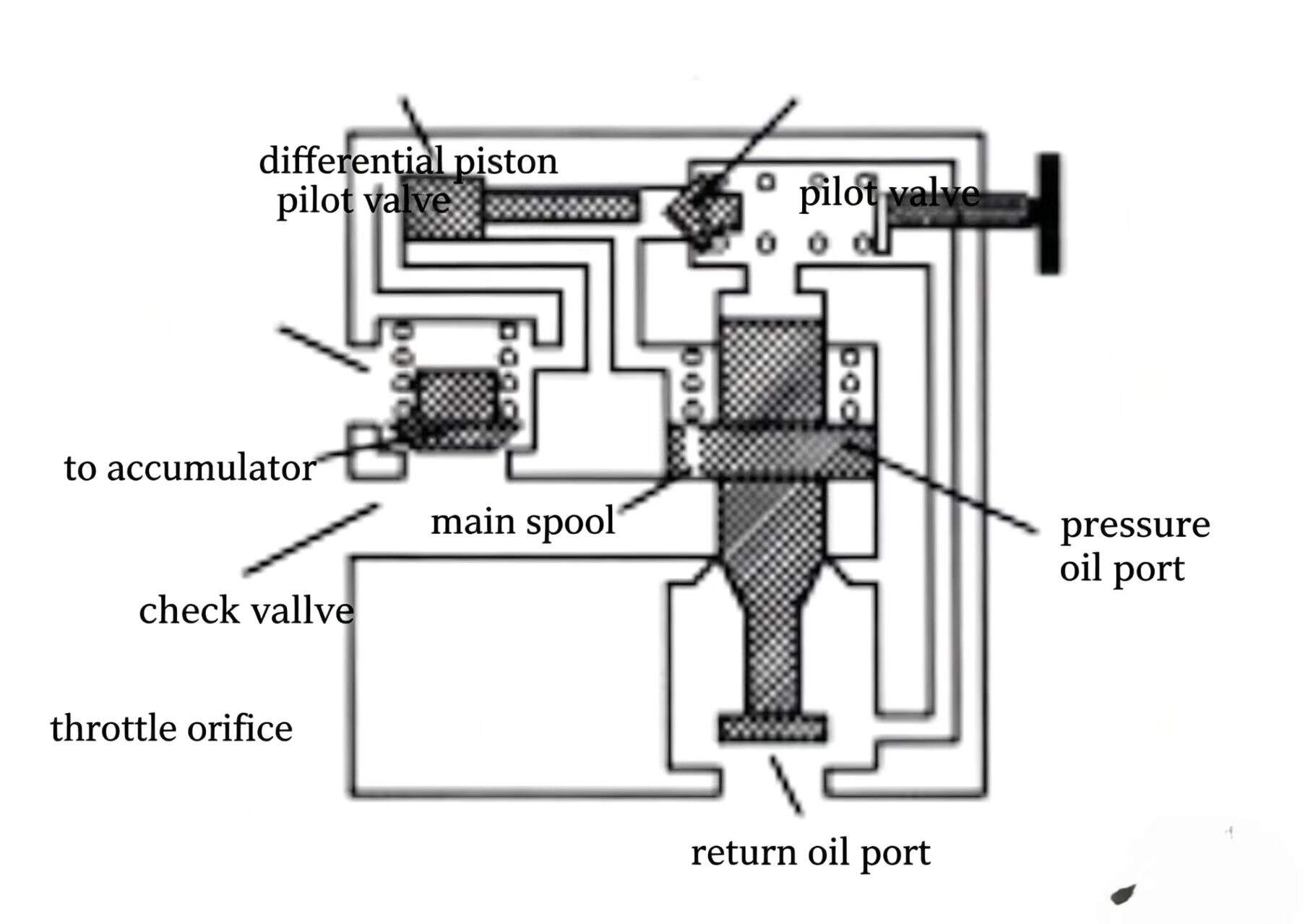
วาล์วปล่อยแรงดันแบบความต่างของแรงดันประกอบขึ้นจากวาล์วระบายแรงดันแบบควบคุมด้วยแรงดันย่อย (pilot-operated relief valve) วาล์วตรวจสอบ (check valve) และลูกสูบแบบความต่าง (differential piston) ภายในตัวเรือนวาล์วเดียวกัน ตัวเรือนวาล์วมีพอร์ตสามช่อง ได้แก่ พอร์ตแรงดัน พอร์ตคืนกลับ และพอร์ตแอคคิวมูเลเตอร์
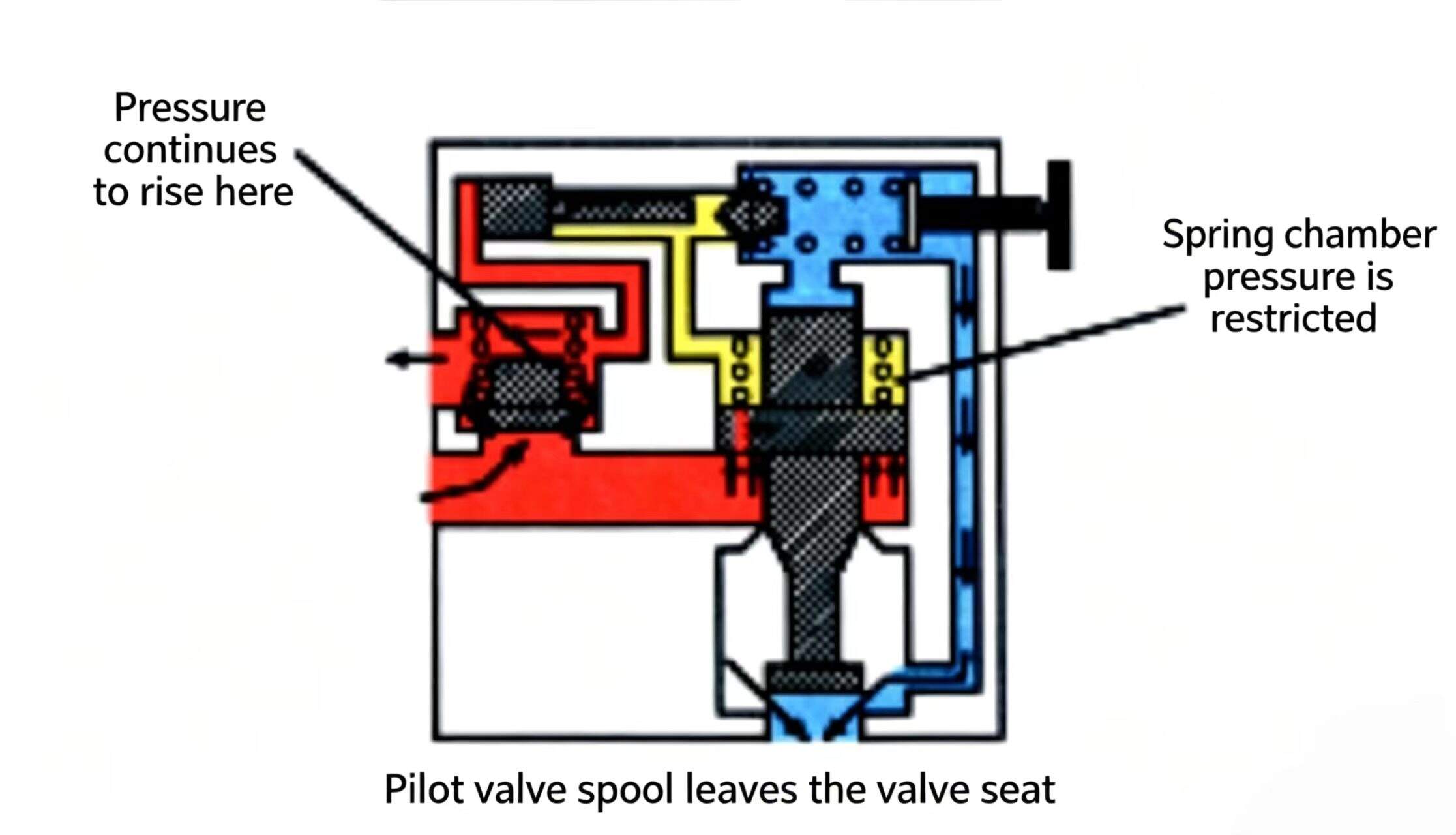
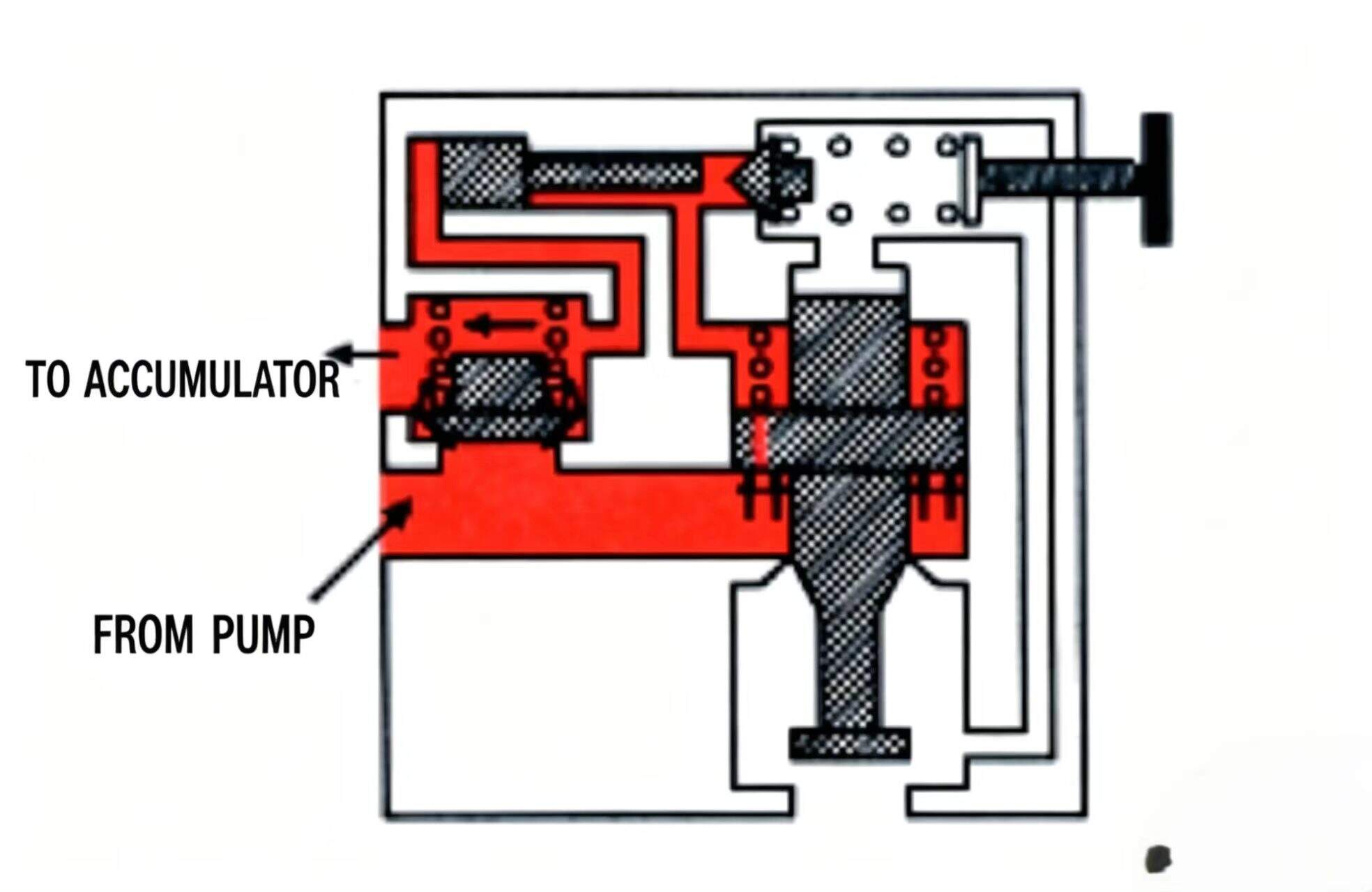
ภายในวาล์วปลดแรงดันแบบความต่างของแรงดัน วาล์วควบคุมทิศทาง (check valve) และวาล์วปลดแรงดันแบบใช้แรงดันนำ (pilot-operated relief valve) ทำงานตามปกติ น้ำมันที่ปั๊มส่งออกสามารถเติมเข้าสู่แอคคิวมูเลเตอร์ผ่านวาล์วควบคุมทิศทางได้ ลูกสูบแบบความต่าง (differential piston) ตั้งอยู่ตรงข้ามกับแกนวาล์วปลดแรงดันแบบใช้แรงดันนำ (pilot relief valve spool) และสามารถเคลื่อนที่ได้อย่างอิสระภายในร่องของมัน ปลายทั้งสองด้านของลูกสูบถูกสัมผัสกับพื้นที่รับแรงดันที่เท่ากัน เมื่อแอคคิวมูเลเตอร์กำลังถูกเติมแรงดัน แรงดันที่ทั้งสองด้านของลูกสูบจะใกล้เคียงกันมาก (โดยไม่พิจารณาการลดลงของแรงดันผ่านวาล์วควบคุมทิศทาง) ดังนั้นลูกสูบจึงไม่เคลื่อนที่ แต่เมื่อแรงดันที่กระทำต่อแกนวาล์วปลดแรงดันแบบใช้แรงดันนำมีค่าสูงพอ แกนวาล์วปลดแรงดันแบบใช้แรงดันนำจะถูกผลักออกจากตำแหน่งที่นั่ง (seat) ซึ่งเป็นที่ทราบกันดีว่า การเคลื่อนที่ของแกนวาล์วปลดแรงดันแบบใช้แรงดันนำนี้สามารถจำกัดแรงดันในช่องใส่สปริงของวาล์วหลัก (main valve spring cavity) ได้ เนื่องจากช่องใส่สปริงของวาล์วหลักและปลายด้านหนึ่งของลูกสูบแบบความต่างถูกจำกัดแรงดันไว้ ลูกสูบจึงเคลื่อนที่ไปทางแกนวาล์วปลดแรงดันแบบใช้แรงดันนำ ผลักแกนวาล์วปลดแรงดันแบบใช้แรงดันนำให้แยกออกจากตำแหน่งที่นั่งอย่างสมบูรณ์ ซึ่งทำให้แรงดันควบคุมที่ช่องใส่สปริงของแกนวาล์วหลัก (main spool spring cavity) ถูกปล่อยออกอย่างมีประสิทธิภาพ ส่งผลให้วาล์วปลดแรงดันทำงานปลดแรงดัน ปั๊ม/มอเตอร์จึงถูกปลดแรงดันด้วย ในขณะเดียวกัน วาล์วควบคุมทิศทางจะปิดลงทันที เพื่อไม่ให้น้ำมันในแอคคิวมูเลเตอร์ไหลกลับผ่านวาล์วปลดแรงดัน
พื้นที่หน้าตัดของลูกสูบแบบดิฟเฟอเรนเชียลที่สัมผัสกับแรงดันมีขนาดใหญ่กว่าพื้นที่หน้าตัดของสปูลวาล์วไพร์ออท 15% เนื่องจากแรง = แรงดัน × พื้นที่ แรงที่ทำให้สปูลวาล์วไพร์ออทยังคงอยู่ในตำแหน่งยกขึ้นจากเบ็ด (seat) จึงมากกว่าแรงที่ยกสปูลวาล์วไพร์ออท 15% ซึ่งหมายความว่า สปริงจะต้องได้รับแรงเพิ่มเติมมากกว่า 15% จากแหล่งอื่น เพื่อดันสปูลวาล์วไพร์ออทกลับเข้าสู่เบ็ด — หรือไม่ก็แรงดันระบบจะต้องลดลง 15% ก่อนที่สปูลวาล์วไพร์ออทจะสามารถกลับเข้าสู่เบ็ดได้
สิ่งนี้ทำให้มั่นใจได้ว่า วาล์วปล่อยแรงดันแบบดิฟเฟอเรนเชียลจะรักษาปั๊ม/มอเตอร์ไว้ในสถานะไม่รับโหลดหลังจากการชาร์จแอคคิวมูเลเตอร์จนกระทั่งแรงดันลดลงตามเปอร์เซ็นต์ที่กำหนดไว้ — โดยทั่วไปประมาณ 15% ของค่าการตั้งค่าแรงดันของวาล์วไพร์ออท ตัวอย่างเช่น หากตั้งค่าแรงดันวาล์วไพร์ออทที่ 1,000 psi (69 บาร์) การปล่อยแรงดันจะเกิดขึ้นระหว่าง 1,000 psi (69 บาร์) ถึง 850 psi (59 บาร์); หากตั้งค่าแรงดันวาล์วไพร์ออทที่ 2,000 psi (138 บาร์) ช่วงการปล่อยแรงดันจะอยู่ระหว่าง 2,000 psi (138 บาร์) ถึง 1,700 psi (117 บาร์)
ในทุกการใช้งาน สำหรับงานไฮดรอลิกเพื่อให้พลังงานทำงานได้เป็นประโยชน์ มันจะต้องถูกแปลงเป็นพลังงานเชิงกล กระบอกสูบไฮดรอลิกทำหน้าที่แปลงพลังงานไฮดรอลิกให้กลายเป็นการเคลื่อนที่เชิงเส้นแบบกล
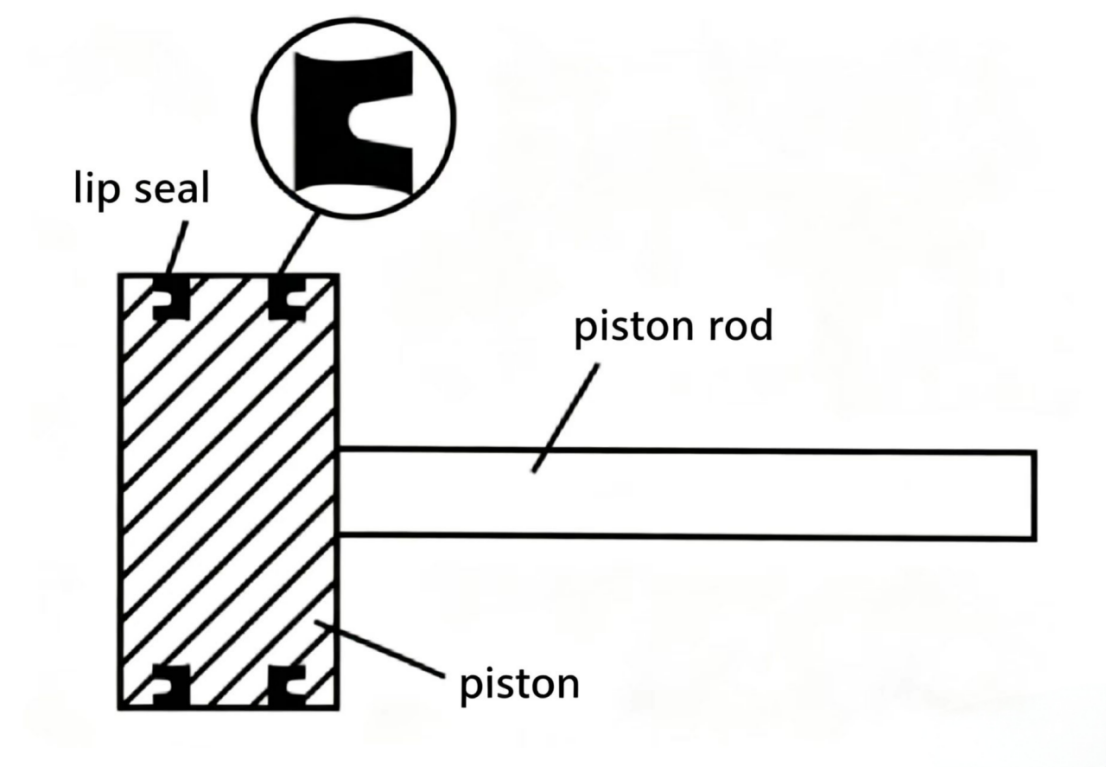
กระบอกสูบไฮดรอลิกประกอบด้วยปลอกกระบอกสูบ ลูกสูบแบบเคลื่อนที่ได้ซึ่งมีแหวนซีลยืดหยุ่นติดอยู่กับก้านลูกสูบ และฝาปิดปลายทั้งสองข้าง ฝาปิดปลายสามารถยึดติดกับปลอกกระบอกสูบด้วยวิธีเกลียว ฟลานจ์ ดึงผ่าน (drawn-over) หรือเชื่อมแบบเชื่อมโลหะ (welded) ได้ กระบอกสูบไฮดรอลิกสำหรับงานอุตสาหกรรมโดยทั่วไปมักใช้การยึดติดแบบสกรูที่ปลายก้านลูกสูบ เมื่อก้านลูกสูบเคลื่อนที่ จะเรียกชุดซีลก้านลูกสูบหรือแหวนนำทางแบบถอดออกได้ ซึ่งทำหน้าที่นำทางและรองรับก้านลูกสูบ
ปลายที่มีก้านลูกสูบเรียกว่า "ปลายก้านลูกสูบ" (rod end) ส่วนอีกปลายหนึ่งที่ไม่มีก้านลูกสูบเรียกว่า "ปลายบอด" (blind end) พอร์ตเข้าและพอร์ตออกตั้งอยู่บนฝาปิดปลายก้านลูกสูบและฝาปิดปลายบอดตามลำดับ
เพื่อการใช้งานอย่างเหมาะสม ซีลนำทางของลูกสูบและก้านลูกสูบของกระบอกสูบไฮดรอลิกต้องมีความแน่นหนาอย่างเชื่อถือได้ ซีลที่นิยมใช้กับลูกสูบของกระบอกสูบไฮดรอลิก ได้แก่ ซีลแบบริม (lip seals), แหวนลูกสูบทำจากเหล็กหล่อ, หรือชุดซีลแบบทิศทางเดียว/สองทิศทางแบบรวมชิ้นเดียว วัสดุและส่วนประกอบของซีลควรตรวจสอบให้แน่ใจว่าเข้ากันได้กับของไหลที่ใช้งานและสภาวะการใช้งาน
ซีลแบบหลายชั้นสำหรับก้านลูกสูบเป็นประเภทซีลก้านลูกสูบที่มีประสิทธิภาพ ประกอบด้วยซีลหลักที่มีพื้นผิวด้านในรูปแบบริม (lip-shaped), ซีลแบบกวาด (wiper) ซึ่งสัมผัสกับพื้นผิวก้านลูกสูบอย่างต่อเนื่องระหว่างการใช้งานและทำหน้าที่กวาดน้ำมันทำงานออกจากพื้นผิวก้านลูกสูบ ซีลกันฝุ่นรองจะเก็บน้ำมันที่เหลือค้างจากซีลหลักไว้ และในขณะที่ก้านลูกสูบหดกลับ จะทำหน้าที่เช็ดสิ่งสกปรกหรือสิ่งแปลกปลอมที่ติดอยู่บนพื้นผิวก้านลูกสูบออก
ดังที่อธิบายข้างต้น น้ำมันที่สะสมอยู่ในช่องว่างระหว่างซีลหลักกับซีลกันฝุ่นสามารถไหลย้อนกลับเข้าสู่ผนังกระบอกสูบได้ในระหว่างจังหวะถดถอย — ซึ่งถือว่าเป็นเรื่องปกติ อย่างไรก็ตาม หากความยาวจังหวะของกระบอกสูบค่อนข้างมาก (10 ฟุต / 3.05 เมตร หรือมากกว่านั้น) น้ำมันที่สะสมอยู่ในช่องว่างซีลอาจมีปริมาณมากพอที่จะเกินความสามารถในการรับน้ำมันของซีลแท่งลูกสูบ ในสถานการณ์เช่นนี้ และเมื่อมีน้ำมันส่วนเกินอยู่ในช่องว่างซีล ควรติดตั้งข้อต่อระบายน้ำออกภายนอกที่ช่องว่างซีลแท่งลูกสูบ
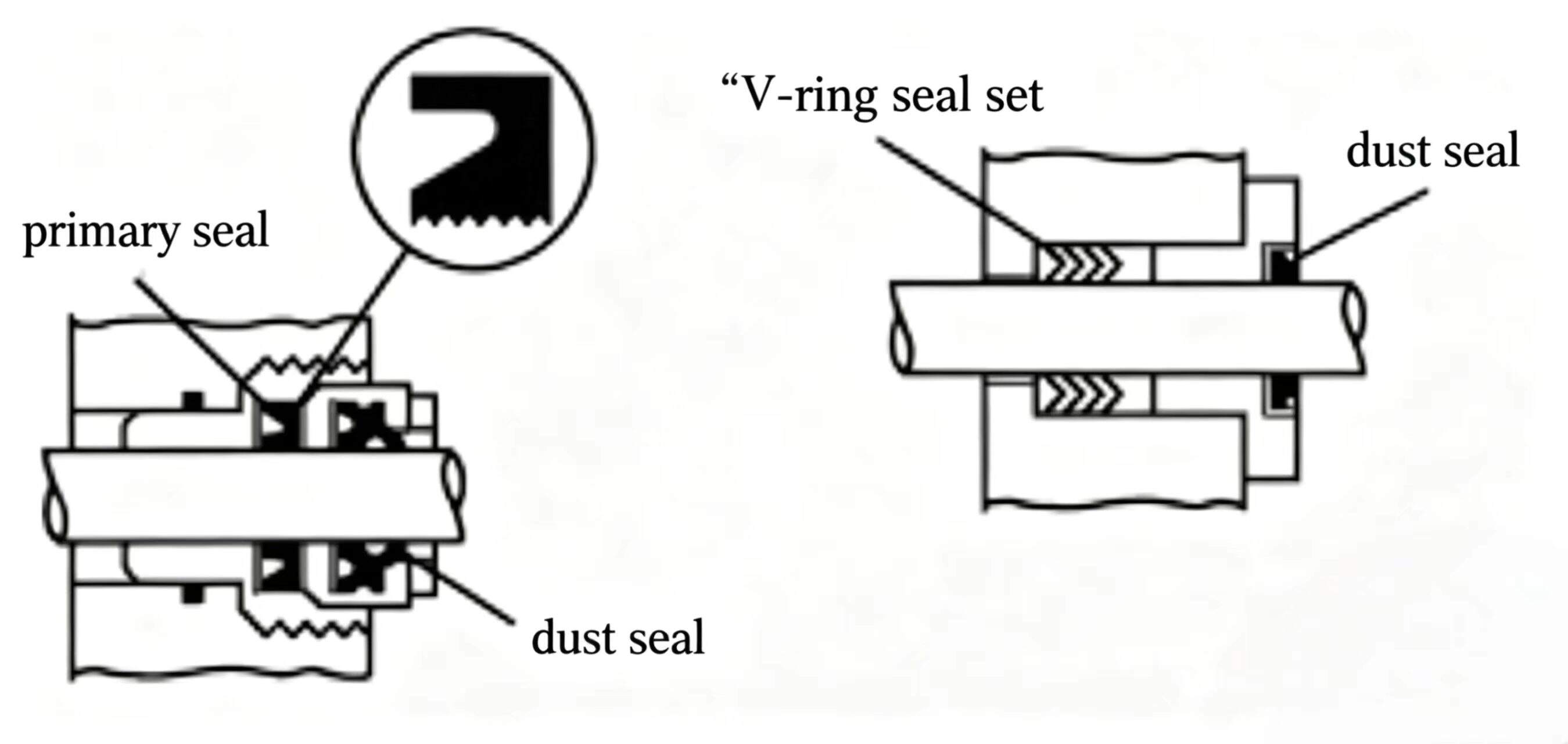
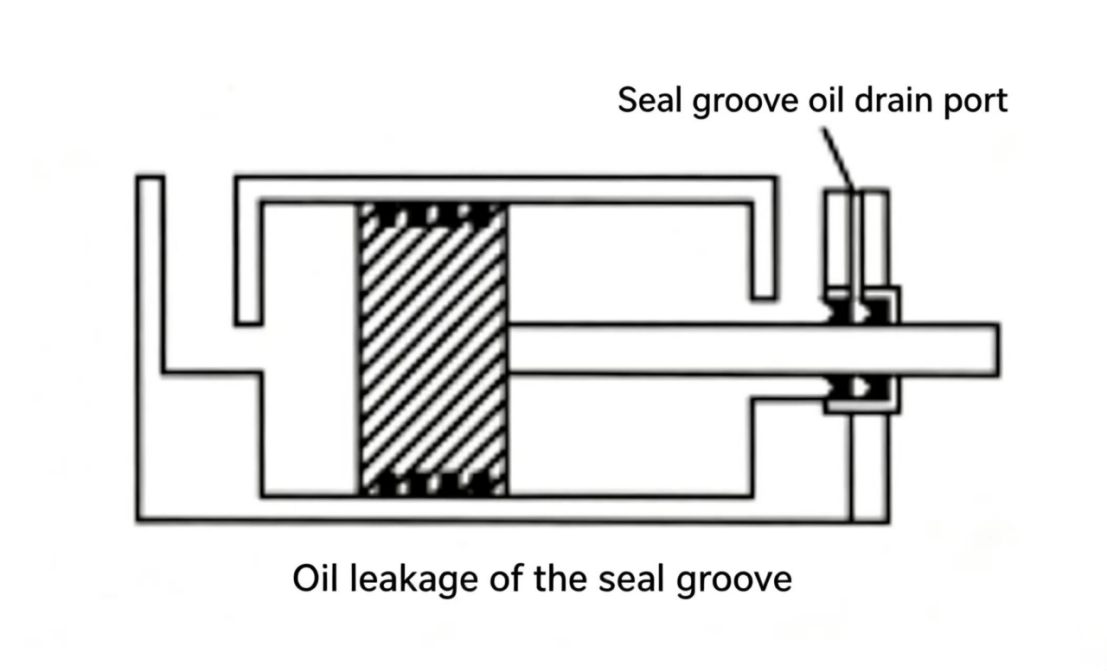
รูปที่ 8-18 รายละเอียดโครงสร้างของกระบอกสูบ ฝาครอบปลายแท่งลูกสูบประกอบด้วยชุดซีลแท่งลูกสูบ สำหรับกระบอกสูบที่มีจังหวะยาว จะมีการเพิ่มช่องระบายน้ำเพื่อป้องกันไม่ให้น้ำมันล้นเกินจนทำให้ซีลเสียหาย
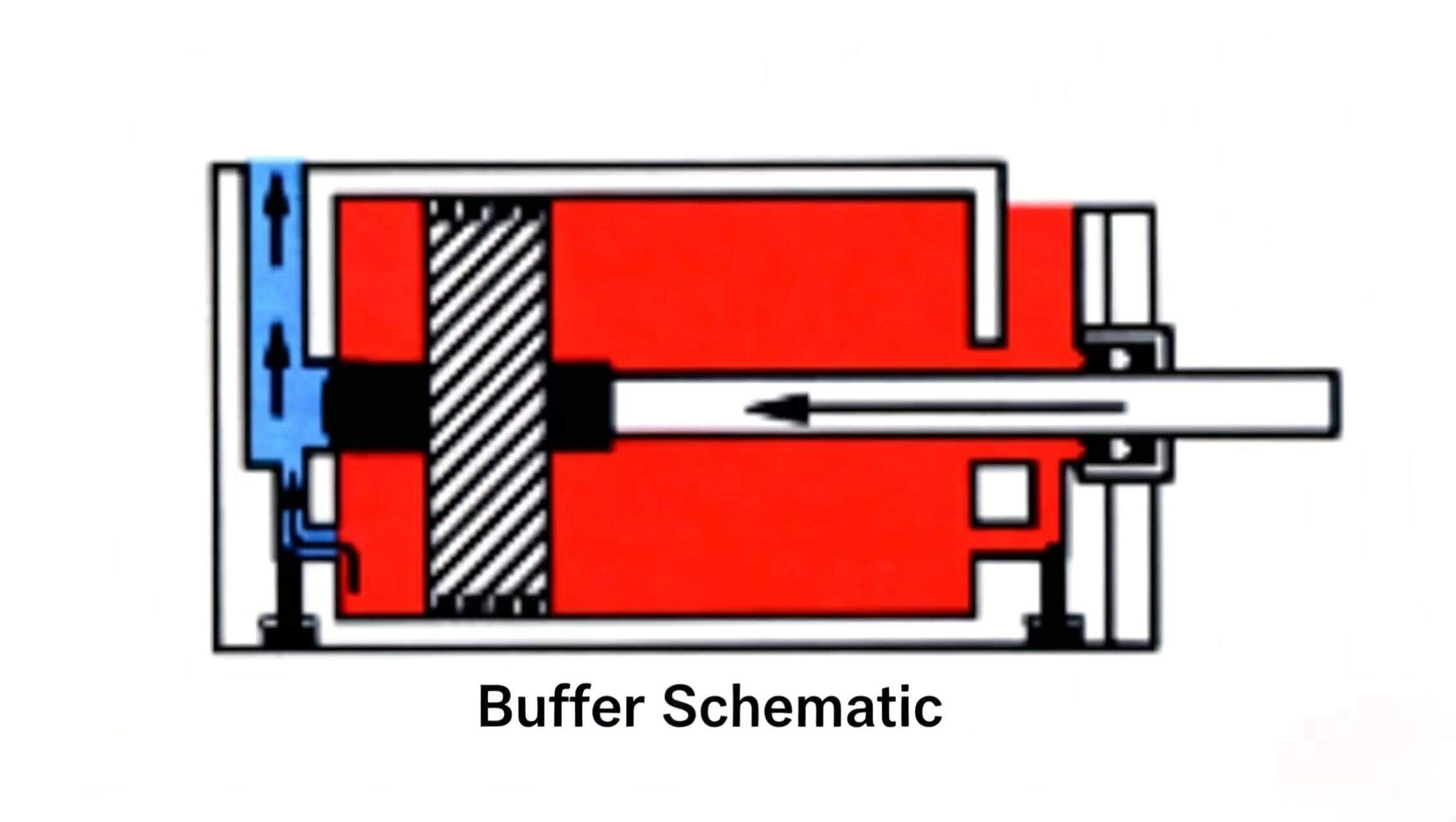
เมื่อพลังงานไฮดรอลิกขับเคลื่อนลูกสูบของกระบอกสูบไปยังจุดสิ้นสุดของจังหวะ (จุดสิ้นสุดของการเคลื่อนที่ของกระบอกสูบ) ความเฉื่อยของน้ำมันจะก่อให้เกิดแรงกระแทก — ซึ่งเรียกกันว่า "แรงกระแทกไฮดรอลิก" หากพลังงานมีขนาดใหญ่พอ แรงกระแทกนี้อาจทำให้กระบอกสูบไฮดรอลิกเสียหาย
เพื่อป้องกันกระบอกสูบไฮดรอลิกจากแรงกระแทกที่รุนแรงเกินไป สามารถติดตั้งอุปกรณ์ลดแรงกระแทกได้ อุปกรณ์ลดแรงกระแทกสามารถทำให้ลูกสูบของกระบอกสูบเคลื่อนที่ช้าลงเมื่อใกล้สิ้นสุดระยะการเคลื่อนที่ อุปกรณ์ลดแรงกระแทกสามารถติดตั้งได้ที่ปลายด้านใดด้านหนึ่ง หรือทั้งสองปลายของกระบอกสูบไฮดรอลิก
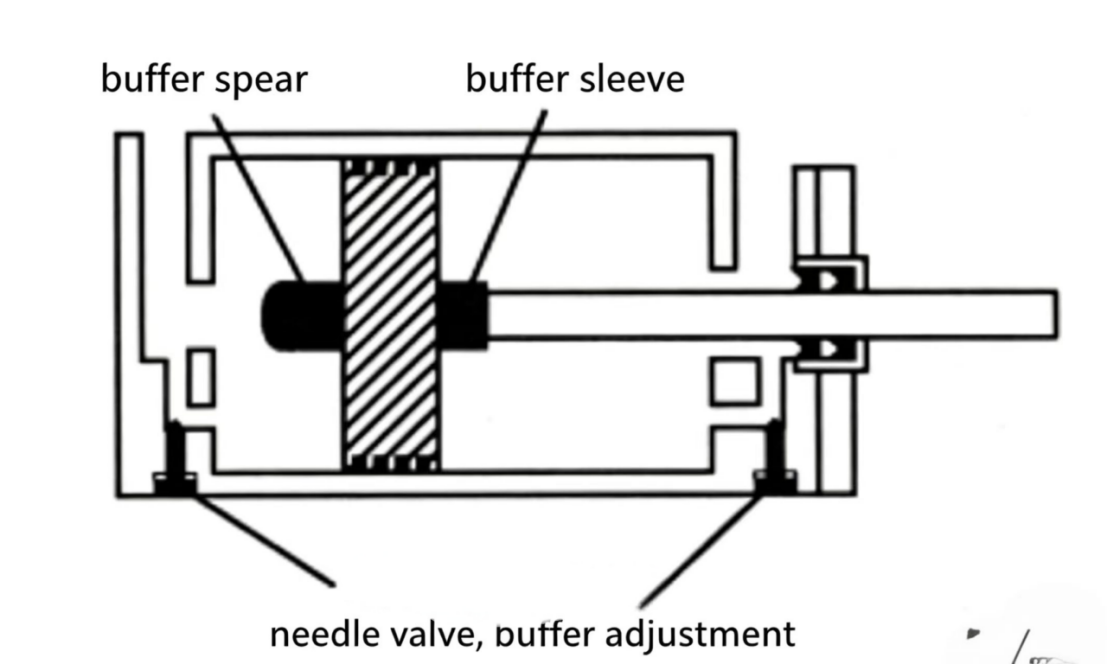
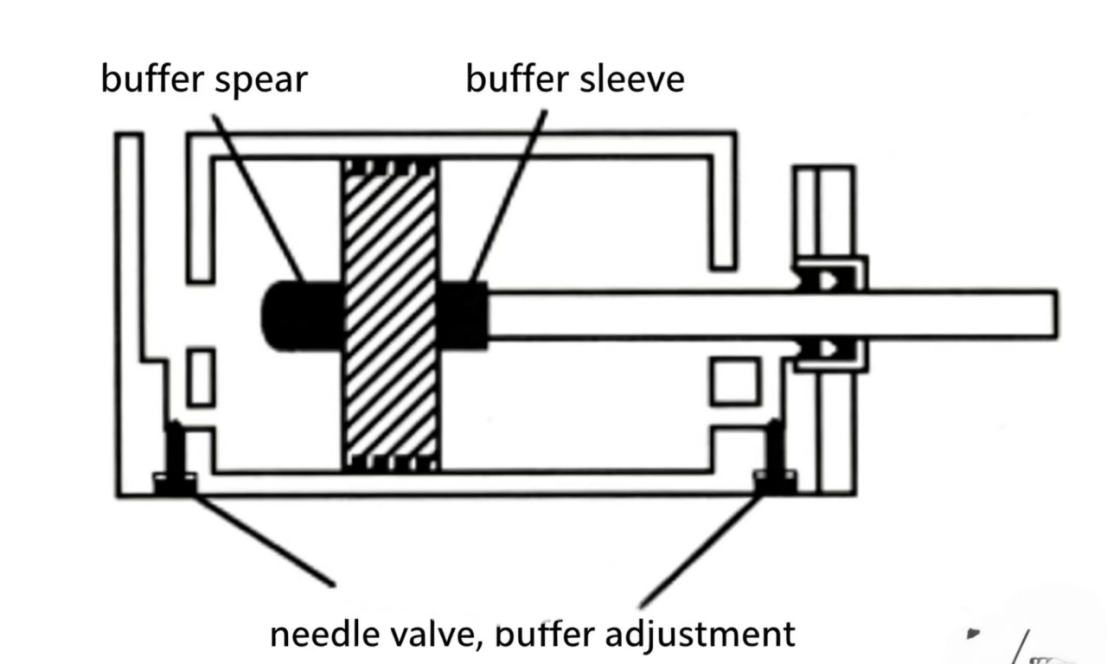
อุปกรณ์ลดแรงกระแทกประกอบด้วยวาล์วเข็มควบคุมการไหลและหัวลดแรงกระแทกที่ติดตั้งอยู่ที่ปลายด้านไม่มีก้านลูกสูบ (blind end) ของลูกสูบ และปลอกลดแรงกระแทกที่ติดตั้งอยู่บนก้านลูกสูบ อุปกรณ์เหล่านี้ทำหน้าที่เป็นจุกอุดที่ปลายแต่ละด้าน
เมื่อลูกสูบของกระบอกสูบไฮดรอลิกเข้าใกล้จุดสิ้นสุดของการเคลื่อนที่ (stroke end) หัวกันกระแทก (cushion spear) หรือปลอกกันกระแทก (cushion sleeve) จะปิดทางออกน้ำมันปกติ ทำให้น้ำมันถูกบังคับให้ไหลผ่านวาล์วเข็มเท่านั้น ส่วนหนึ่งของน้ำมันความดันที่ตั้งค่าไว้ที่วาล์วระบายแรงดันจะไหลผ่านวาล์วเข็มออกไป ขณะที่การไหลที่เหลือผ่านวาล์วเข็มจะกำหนดอัตราการลดความเร็วของกระบอกสูบ การปรับแต่งวาล์วเข็มจะกำหนดอัตราการลดความเร็วของลูกสูบ ในจังหวะย้อนกลับ (return stroke) น้ำมันไหลเข้าสู่กระบอกสูบผ่านวาล์วตรวจสอบแบบเดี่ยว (single check valve) (ไม่แสดงในภาพ) ซึ่งจะหลีกเลี่ยงการผ่านวาล์วเข็ม ดังนั้นความเร็วในการเคลื่อนที่ย้อนกลับจึงไม่ได้รับผลกระทบ
บางครั้ง ความยาวการเคลื่อนที่ (stroke length) ของกระบอกสูบไฮดรอลิกจำเป็นต้องจำกัดโดยการควบคุมภายนอก โดยการติดตั้งสกรูหยุด (stop screw) ที่สามารถขันเข้าหรือขันออกได้บนตัวกระบอกสูบ (barrel) เพื่อปรับความยาวการเคลื่อนที่ล่วงหน้า อย่างไรก็ตาม ตัวปรับความยาวการเคลื่อนที่ทุกชนิดจำเป็นต้องผ่านการตรวจสอบเพื่อให้สอดคล้องกับข้อกำหนดด้านแรงหยุด (stopping force), การชน (collision), แรงกระแทก (impact) และผลต่อมิติ (dimensional effects)
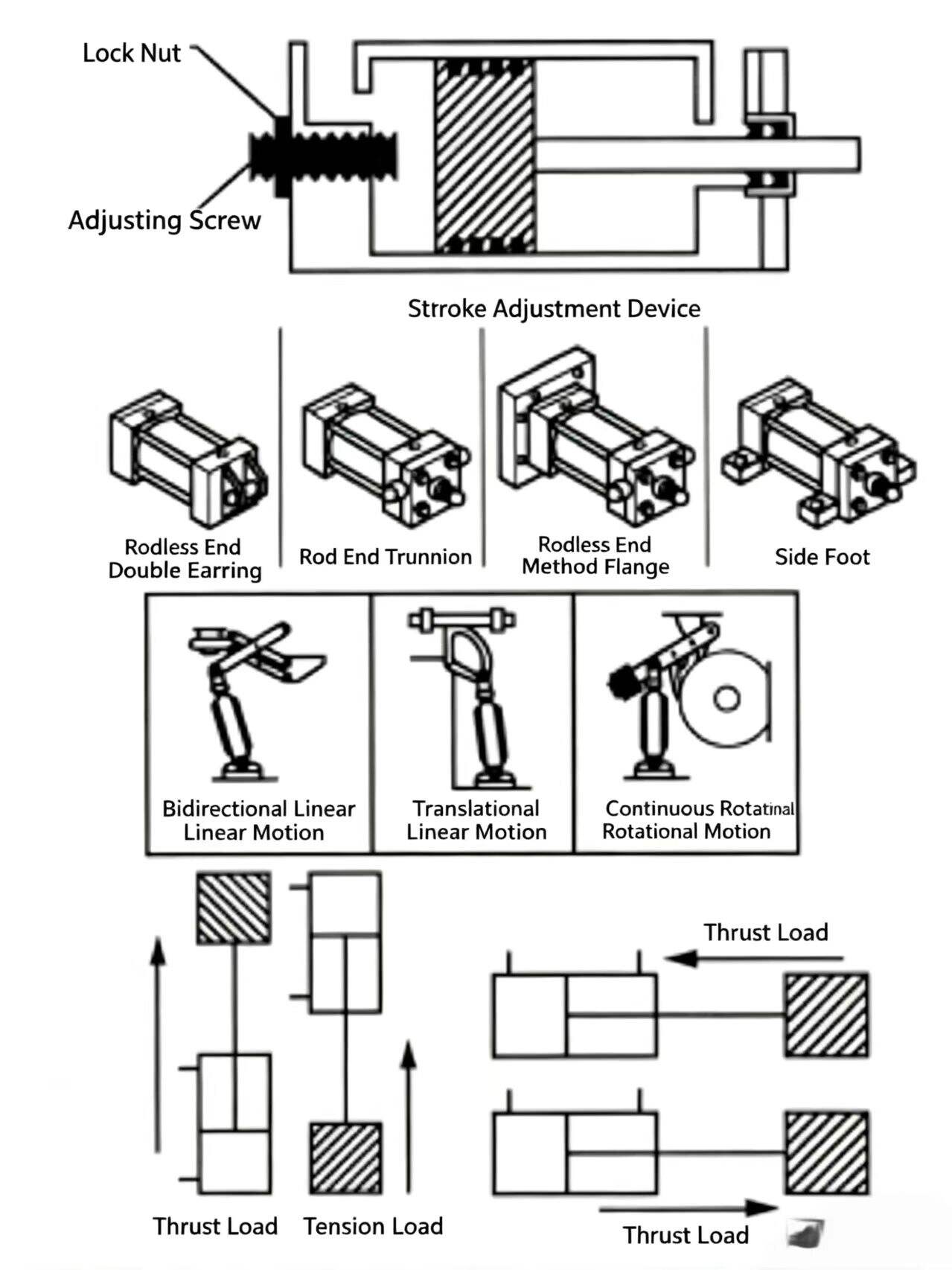
รูปที่ 8-19 ตัวหน่วงกระบอกสูบ ตัวปรับระยะชัก รูปแบบการยึดติด และประเภทของโหลด ตัวหน่วงทำหน้าที่ปกป้องกระบอกสูบเมื่อถึงจุดสิ้นสุดของการชัก ส่วนรูปแบบการยึดติดจะกำหนดความสามารถของกระบอกสูบในการรับโหลดได้ดีเพียงใด
กระบอกสูบไฮดรอลิกมีหลายรูปแบบการยึดติด ได้แก่ แผ่นยึดแบบฟลานจ์ (flanges), แบริ่งหมุนแบบทรันเนียน (trunnions), ฐานยึดด้านข้าง (side-lug mounts), สกรูยึดแนวศูนย์กลาง (centerline screws), แหวนยึดแบบสองลูกกลิ้ง (double lug rings), แท่งยึดแบบไทโรด (tie-rods) และการเชื่อมยึด (weld mounts) โดยการยึดติดแบบลูกกลิ้งศูนย์กลาง (center-lug mounts) หรือการเชื่อมยึด (weld mounts) ถือเป็นการออกแบบที่ดีมาก เนื่องจากช่วยลดความไม่สมมาตรในการทำงานของกระบอกสูบให้น้อยที่สุด
กระบอกสูบไฮดรอลิกสามารถแปลงพลังงานไฮดรอลิกให้เป็นการเคลื่อนที่เชิงเส้นหรือการเคลื่อนที่เชิงตรงแบบกลไก อย่างไรก็ตาม เนื่องจากการเลือกใช้ระบบข้อต่อเชิงกล (mechanical linkages) กระบอกสูบจึงสามารถสร้างการเคลื่อนที่เชิงกลแบบต่าง ๆ ได้หลากหลายรูปแบบ
กระบอกสูบไฮดรอลิกสามารถเคลื่อนย้ายโหลดหลายประเภทในแอปพลิเคชันที่หลากหลาย โดยทั่วไปแล้ว โหลดที่ถูกดันโดยก้านลูกสูบเรียกว่า 'โหลดแบบดัน' (push loads) ส่วนโหลดที่ถูกดึงโดยก้านลูกสูบเรียกว่า 'โหลดแบบดึง' (pull loads)
ทูบสต๊อป (Stop tube) คือ ปลอกโลหะแข็งที่ติดตั้งอยู่บนก้านลูกสูบ เมื่อก้านลูกสูบของกระบอกสูบที่มีช่วงการเคลื่อนที่ยาว (long-stroke cylinder) ยืดออกเต็มที่ ทูบสต๊อปจะทำหน้าที่แยกลูกสูบกับปลอกนำทาง (guide sleeve) ออกจากกันเป็นระยะหนึ่ง ปลอกนำทางก้านลูกสูบเป็นแบริ่งที่ทำหน้าที่รองรับก้านลูกสูบระหว่างการใช้งานของกระบอกสูบ โดยออกแบบมาให้รับน้ำหนักได้ในระดับหนึ่ง นอกจากจะทำหน้าที่เป็นเพลาแล้ว ปลอกนำทางก้านลูกสูบยังทำหน้าที่เป็นจุดรับน้ำหนักสำหรับก้านลูกสูบด้วย สำหรับกระบอกสูบที่มีช่วงการเคลื่อนที่ยาวซึ่งเชื่อมต่อกับภาระภายนอก ก้านลูกสูบจะมีแนวโน้มหย่อนลง (droop) หรือโก่งตัวเมื่อยืดออกเต็มที่ หากไม่มีปลอกนำทางที่มีความแข็งแรงเพียงพอ ซึ่งอาจก่อให้เกิดแรงข้าง (side load) ที่ทำลายปลอกนำทางก้านลูกสูบ
หน้าที่ของทูบสต๊อปคือ การแยกลูกสูบกับปลอกนำทางออกจากกันเป็นระยะหนึ่งเมื่อก้านลูกสูบยืดออกเต็มที่ เพื่อลดภาระที่ตกกระทบต่อปลอกนำทางก้านลูกสูบ
กระบอกสูบไฮดรอลิกมีหลายประเภท ด้านล่างนี้คือประเภทของกระบอกสูบที่ใช้กันทั่วไป ซึ่งจะปรากฏในวงจรการประยุกต์ใช้งานบางแบบในบทเรียนถัดไป
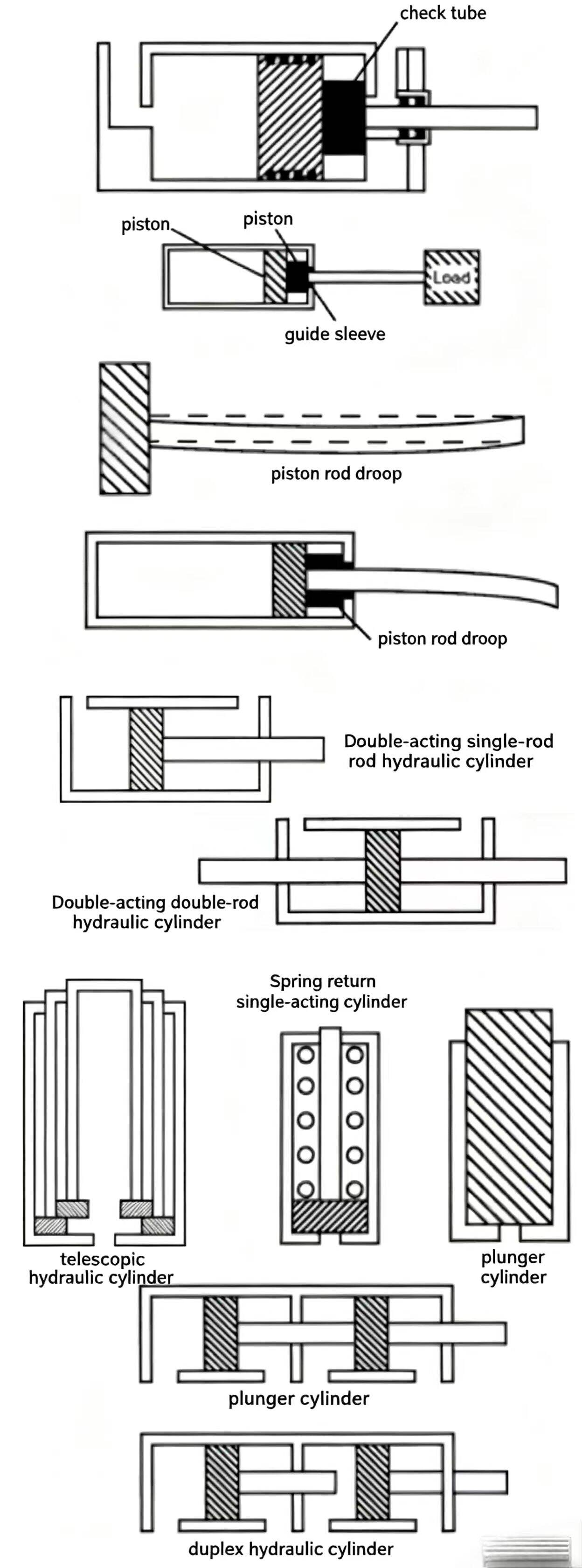
รูปที่ 8-20 ประเภทของกระบอกสูบไฮดรอลิก แต่ละประเภทเหมาะสำหรับการใช้งานเฉพาะ: แบบถดถอย (telescoping) สำหรับระยะชักยาวในพื้นที่จำกัด, แบบคู่ (tandem) สำหรับแรงสูงในเส้นผ่านศูนย์กลางกระบอกสูบจำกัด, และแบบมีก้านลูกสูบสองด้าน (double-rod) สำหรับให้แรงและอัตราเร็วเท่ากันทั้งสองทิศทาง
ประเภทที่พบได้บ่อยที่สุดในระบบไฮดรอลิกเชิงอุตสาหกรรมคือกระบอกสูบแบบสองทิศทางพร้อมก้านลูกสูบเดี่ยว สำหรับประเภทนี้ ประเด็นสำคัญที่ต้องพิจารณา ได้แก่ อัตราการไหลสูงสุดที่ยอมรับได้ (gpm) และความดันสูงสุดที่ยอมรับได้ (psi) รวมทั้งแรงเชิงกลที่แปลงได้จริงและระยะการเคลื่อนที่ของก้านลูกสูบ
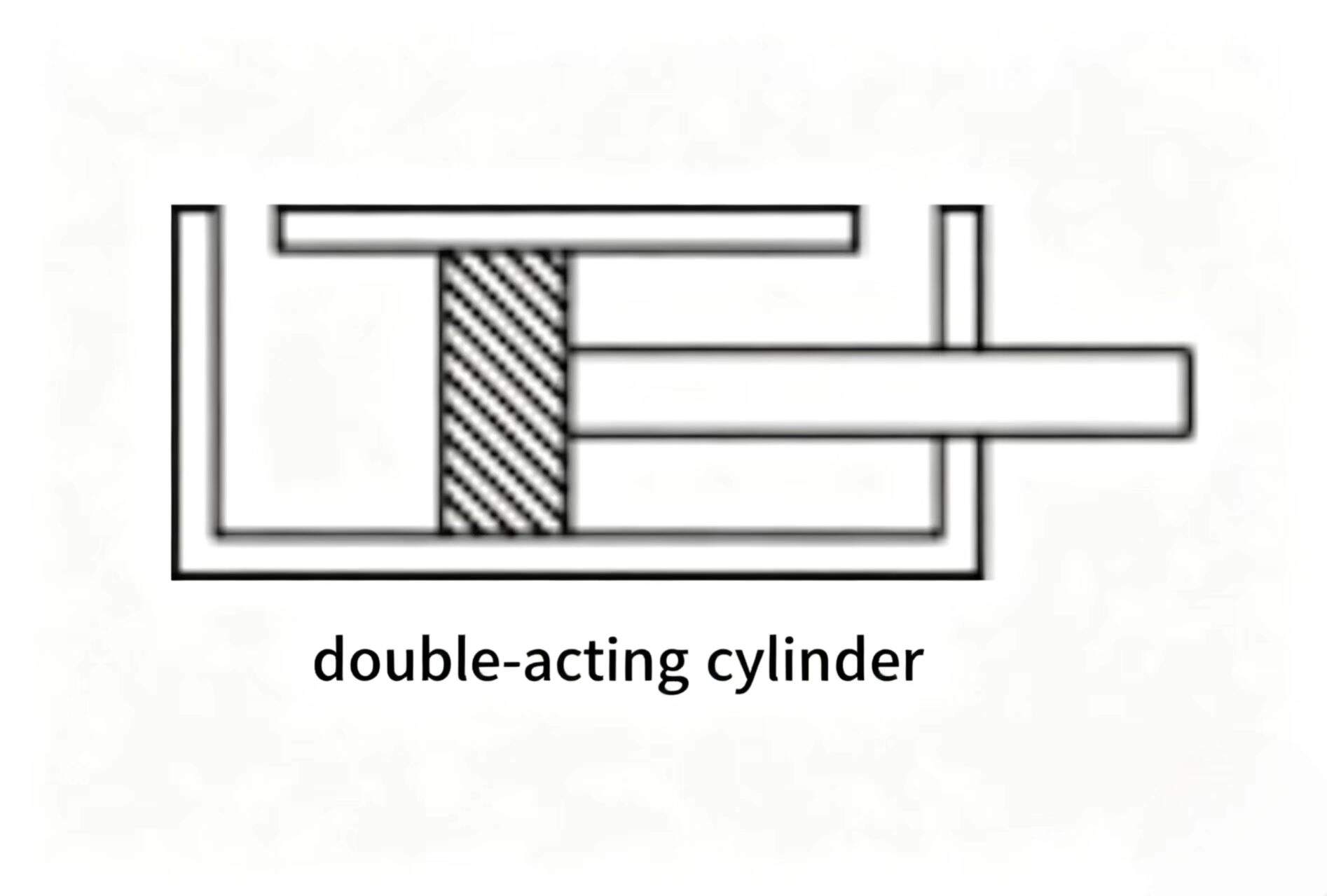
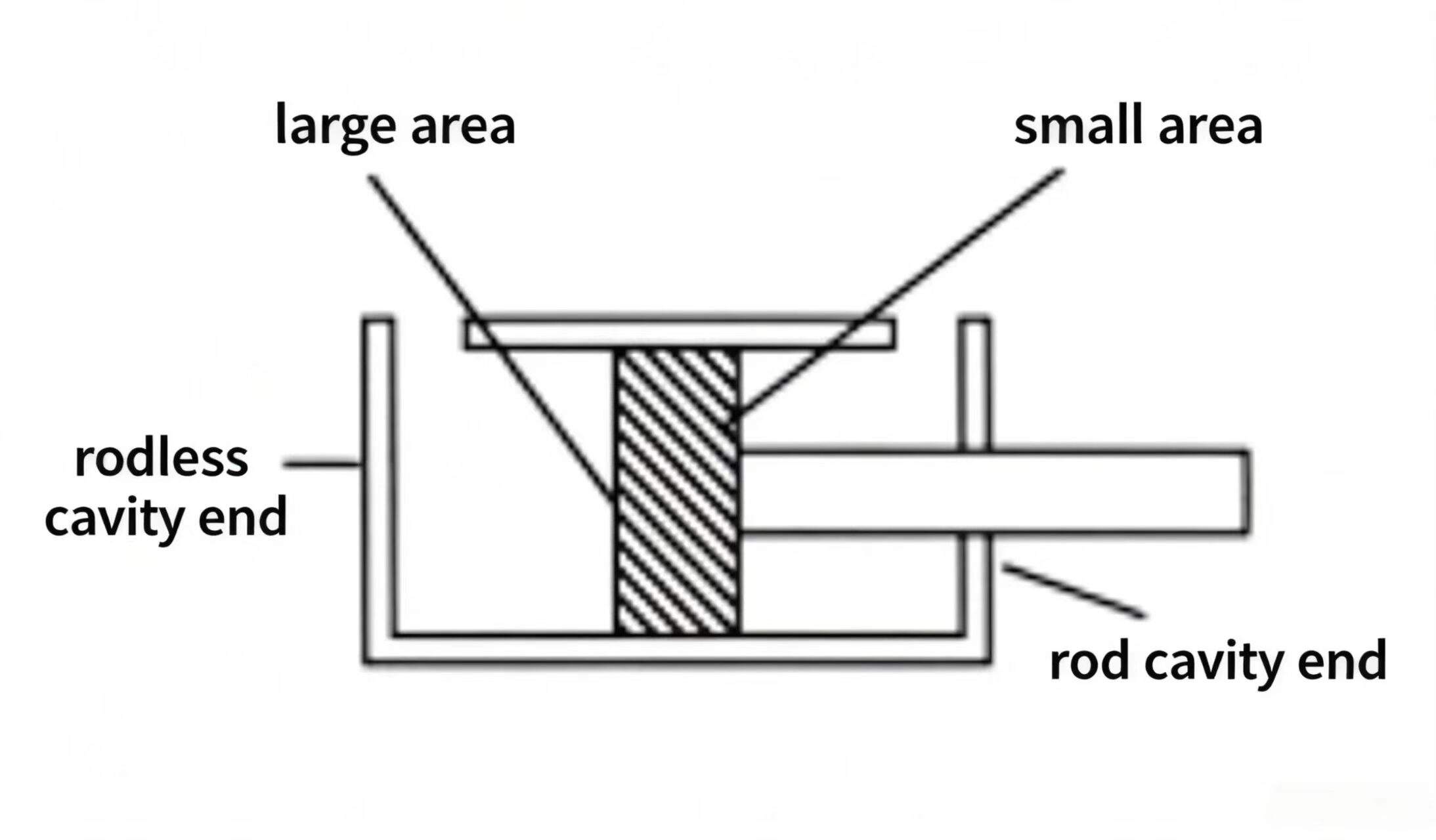
พื้นที่หน้าตัดของลูกสูบและพื้นที่หน้าตัดที่มีผลต่อการทำงานของลูกสูบมักจะกล่าวถึงในกรณีของกระบอกสูบแบบสองทิศทางพร้อมก้านลูกสูบเดี่ยว พื้นที่หน้าตัดของลูกสูบขนาดใหญ่คือพื้นที่หน้าตัดทั้งหมดของลูกสูบที่สัมผัสกับแรงดันที่ปลายไม่มีก้านลูกสูบ (blind end) ของกระบอกสูบ ส่วนพื้นที่หน้าตัดที่มีผลต่อการทำงานขนาดเล็ก (พื้นที่แหวน) คือพื้นที่หน้าตัดของลูกสูบที่สัมผัสกับแรงดันที่ด้านที่มีก้านลูกสูบ เนื่องจากก้านลูกสูบเข้าไปครอบครองบางส่วนของพื้นที่หน้าตัดลูกสูบ ดังนั้น พื้นที่หน้าตัดที่มีผลต่อการทำงานขนาดเล็กจึงมักมีค่าน้อยกว่าพื้นที่หน้าตัดขนาดใหญ่
ความเร็วในการยืดตัวของก้านลูกสูบของกระบอกสูบไฮดรอลิกขึ้นอยู่กับอัตราการไหลของของเหลวเข้าสู่ปลายที่ไม่มีก้านลูกสูบ (blind end) ของกระบอกสูบ ความเร็วของก้านลูกสูบมักแสดงเป็นหน่วยฟุตต่อนาที (ft/min) หรือเมตรต่อนาที (m/min):
ความเร็วของก้านลูกสูบ (ft/min) = อัตราการไหล (gpm) × 19.25 ÷ พื้นที่หน้าตัดของลูกสูบ (in²)
* ความเร็วของก้านลูกสูบ (m/s) = อัตราการไหล (Lpm) × 0.167 ÷ พื้นที่หน้าตัดของลูกสูบ (cm²)
* หากคำนวณเป็นหน่วย m/s และผลลัพธ์น้อยกว่า 0.1 m/s ให้แสดงผลลัพธ์ในหน่วย mm/s
ตัวอย่าง: กระบอกสูบที่มีพื้นที่หน้าตัดของลูกสูบเท่ากับ 10 in² (64.5 cm²) ได้รับอัตราการไหล 5 gpm (18.95 Lpm) ความเร็วของก้านลูกสูบ = (5 × 19.25) ÷ 10 = 9.63 ft/min (49 mm/s) หากเพิ่มอัตราการไหลเป็นสองเท่า (10 gpm / 37.9 Lpm) ความเร็วของก้านลูกสูบจะเพิ่มเป็นสองเท่าเช่นกัน คือ 19.25 ft/min (97.33 mm/s)
ระหว่างการหดตัวของก้านลูกสูบ ของเหลวจะไหลเข้าสู่ปลายที่มีก้านลูกสูบ (rod end) ด้วยอัตราการไหลขาเข้าเดียวกัน ความเร็วในการหดตัวจะเร็วกว่าความเร็วในการยืดตัว — ให้ใช้พื้นที่หน้าตัดของลูกสูบส่วนที่เล็กกว่า (พื้นที่แหวนรอบก้านลูกสูบ หรือ annular area) ในการคำนวณตามสูตร
ตัวอย่าง: อัตราการไหล 10 แกลลอนต่อนาที (38 ลิตรต่อนาที) เข้าสู่ปลายด้านก้านของกระบอกสูบซึ่งมีพื้นที่หน้าตัดใหญ่ 10 ตารางนิ้ว (65 ตารางเซนติเมตร) และพื้นที่หน้าตัดเล็ก 8 ตารางนิ้ว (52 ตารางเซนติเมตร) ความเร็วในการหดตัว = (10 × 19.25) ÷ 8 = 24.06 ฟุตต่อนาที (0.12 เมตรต่อวินาที)
ความเร็วของก้าน (ฟุตต่อนาที) = อัตราการไหล (แกลลอนต่อนาที) × 19.25 ÷ พื้นที่หน้าตัดเล็ก (ตารางนิ้ว)
ความเร็วของก้าน (เมตรต่อวินาที) = อัตราการไหล (ลิตรต่อนาที) × 0.167 ÷ พื้นที่หน้าตัดเล็ก (ตารางเซนติเมตร)
เมื่อมีอัตราการไหลขาเข้าเท่ากัน กระบอกสูบแบบสองทิศทางชนิดก้านเดียวจะหดตัวเร็วกว่าที่ขยายตัว
ในระหว่างการหดตัว ของไหลจะเข้าสู่ปลายด้านก้านและออกจากปลายด้านไม่มีก้าน (blind end) อัตราการไหลออกจะมากกว่าอัตราการไหลขาเข้า — สามารถคำนวณได้โดยใช้สูตรเดียวกับแกลลอนต่อนาที (ลิตรต่อนาที) แต่ใช้พื้นที่หน้าตัดของลูกสูบด้านใหญ่เป็นเกณฑ์ ตัวอย่าง: อัตราการไหลขาเข้า 10 แกลลอนต่อนาทีที่ปลายด้านก้าน ที่ความเร็ว 24.06 ฟุตต่อนาที: อัตราการไหลออก = (24.06 × 10) ÷ 19.25 = 12.5 แกลลอนต่อนาที (46 ลิตรต่อนาที)
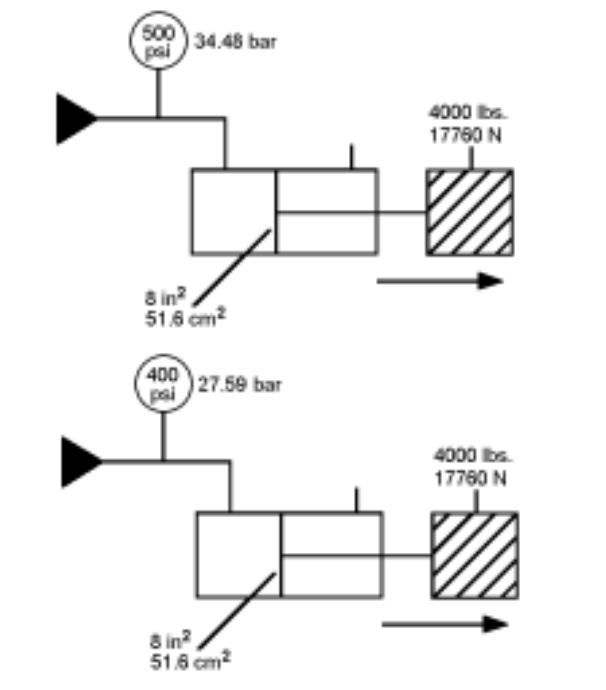
ดังที่แสดงไว้ แรงที่เกิดจากกระบอกสูบไฮดรอลิกเป็นฟังก์ชันของความดันไฮดรอลิกที่กระทำต่อพื้นที่หน้าตัดของลูกสูบในกระบอกสูบ หากกระบอกสูบเฉพาะเจาะจงจำเป็นต้องสร้างแรงส่งออกสูงสุดที่มากกว่าค่าปัจจุบัน มักจะสามารถทำได้โดยการเพิ่มความดันให้สอดคล้องกับระดับที่ต้องการ ในบางสถานการณ์ ความดันของระบบและขนาดของกระบอกสูบไม่อนุญาตให้ใช้กระบอกสูบที่มีขนาดใหญ่ขึ้น — กระบอกสูบแบบแท่นคู่ (Tandem cylinder) สามารถแก้ไขปัญหานี้ได้
กระบอกสูบแบบแท่นคู่ประกอบด้วยกระบอกสูบสองตัวหรือมากกว่าที่ต่อกันแบบอนุกรม โดยก้านลูกสูบเชื่อมต่อกันเพื่อสร้างก้านลูกสูบร่วมเดียวกัน ซีลก้านลูกสูบระหว่างกระบอกสูบแต่ละตัวทำให้แต่ละกระบอกสูบสามารถทำงานแบบสองทิศทาง (double-acting) ได้ เมื่อขนาดของกระบอกสูบถูกจำกัดด้วยพื้นที่ว่างและขนาดของเครื่องจักร แม้ว่าความดันที่ปั๊ม/มอเตอร์สร้างขึ้นจะค่อนข้างต่ำ แต่ก็ยังสามารถได้แรงส่งออกเชิงกลเท่าเดิมได้
ตัวอย่าง: การติดตั้งเครื่องจักรขนาดใหญ่ที่สุดสามารถรองรับพื้นที่หน้าตัดลูกสูบได้สูงสุด 10 ตารางนิ้ว (64.5 ตารางเซนติเมตร) ความดันสูงสุดที่ใช้เอาชนะแรงต้านของโหลดคือเพียง 500 psi (34.48 บาร์) การเพิ่มความดัน 500 psi (34.48 บาร์) ลงบนด้านพื้นที่ใช้งาน 8 ตารางนิ้ว (51.6 ตารางเซนติเมตร) พร้อมความดันย้อนกลับจะสร้างแรง 781 psi (53.86 บาร์) ในวงจรแบบแท่งคู่ (tandem circuit) ที่มีกระบอกสูบสองตัว โดยแต่ละตัวทำงานที่ความดัน 500 psi (34.48 บาร์) มีพื้นที่หน้าตัด 10 ตารางนิ้ว และพื้นที่ใช้งาน 8 ตารางนิ้ว ผลรวมของแรงขาออกจะมีค่ามากกว่าอย่างมาก
สูตรสำคัญ — บทที่ 8
|
สูตร |
สมการ |
หมายเหตุ |
|
ความเร็วในการยื่นก้านลูกสูบ |
v = Q × 19.25 ÷ A_large |
Q หน่วยเป็น gpm, A หน่วยเป็น in², v หน่วยเป็น ft/min |
|
ความเร็วในการถอยก้านลูกสูบ |
v = Q × 19.25 ÷ A_small |
ใช้พื้นที่แหวน (พื้นที่เล็ก) |
|
ความเร็วของก้านลูกสูบ (ระบบหน่วยวัด SI) |
v = Q × 0.167 ÷ A |
Q หน่วยเป็นลิตรต่อนาที (Lpm), A หน่วยเป็นตารางเซนติเมตร (cm²), v หน่วยเป็นเมตรต่อวินาที (m/s) |
|
การปล่อยของไหลที่ปลายปิด |
Q_out = v × A_large ÷ 19.25 |
มีทางออกมากกว่าทางเข้าในระหว่างการหดตัว |
|
แรงกระทำบนกระบอกสูบ |
F = P × A |
F หน่วยเป็นปอนด์ (lbs), P หน่วยเป็นปอนด์ต่อตารางนิ้ว (psi), A หน่วยเป็นตารางนิ้ว (in²) |

ยินดีต้อนรับสู่ Hovoo โรงงานปักผนึกจีน ผลิตปักผนึก PU, ยาง และ PTFE ปักผนึกประกอบด้วย O-ring, ปักผนึกพิสตอง, ปักผนึกไม้, ปักผนึกแหวนสีเทาและปักผนึกแก๊ส



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}