33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]
33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]

Bir hidrolik silindir, hidrolik enerjiyi doğrusal veya düz çizgi boyunca mekanik harekete dönüştürür. Hareketli bir yüke bağlandığında iş yapar.
Daha önceki bölümlerde de belirtildiği gibi, bir hidrolik silindir çoğunlukla bir gövde (barrel), iki kapalı uç kapak, bir piston, bir piston milinden ve giriş ile çıkış portlarından oluşur. Her uçta birer port bulunur — biri yağ girişi için, diğeri yağ çıkışı içindir.
şekil 6-1 Standart çift etkili hidrolik silindir. Yağ sol taraftaki porttan girer ve milin uzamasına neden olur; sağ taraftaki porttan akan yağ ise milin geri çekilmesini sağlar.
Silindir stroku boyunca hidrolik enerji hareketli pistona etki eder. Bu hidrolik enerjinin oluşturduğu basınç, yükün oluşturduğu direnci aşmaz. Bilinen boyutlara sahip bir silindir için, belirli bir çıkış kuvveti üreten çalışma basıncını bilmemiz gerekir. Bu değer (sürtünme ihmal edilirse) aşağıdaki formülle belirlenebilir:
Basınç = Kuvvet ÷ Alan
Bu formül kullanılırken ya alan ve basınç verilir ve çıkış kuvveti hesaplanır, ya da alan ve çıkış kuvveti bilinir ve basınç hesaplanır. Uygulamada genellikle silindir iç çapı bilinir ve piston alanı hesaplanmalıdır; ancak bir dairenin alanını hesaplamak, bir karenin alanını hesaplamak kadar kolaydır.
Bir dairenin alanı, kenarı dairenin çapına eşit olan bir karenin alanının yaklaşık %78,54'üne eşittir. Daha kesin olarak:
Daire alanı = Çap² × 0,7854
Başka yaygın olarak kullanılan bir formül:
Daire alanı = π × D² ÷ 4

Şekil 6-2 Daire alanı = D² × 0,7854. Bu basit formül, hidrolik silindir hesaplamalarında sürekli kullanılır.
Hidrolik enerjinin etki ettiği mesafe, yapılan iş miktarını belirler — bu mesafe silindir stroku durumundadır. Daha önce de belirtildiği gibi, kuvveti artırmak amacıyla hidrolik basıncı kullanmak hiçbir maliyet gerektirmiyormuş gibi görünür. Bazı özel durumlarda — sistem statikken — küçük bir kuvvet, açıkça bir fedakârlık yapılmaksızın çok büyük bir kuvvet oluşturabilir. Ancak bu artırılmış kuvvet aynı zamanda harekete neden oluyorsa bir şey fedakârlık edilir: mesafe.
Her hidrolik silindirin, stroku (inç cinsinden) ile piston alanının (inç² cinsinden) çarpımına eşit bir hacmi (deplasmanı) vardır; bu da hacmi inç³ (cm³) cinsinden verir.
Silindir hacmi = Piston alanı × Strok
(in³) = (in²) × (in) veya (cm³) = (cm²) × (cm)
Örnek: Üst piston, alt silindir pistonunun 1 in (2,54 cm) hareket etmesini sağlamak için 2 in (5,08 cm) hareket etmelidir. Her iki piston da aynı işi yapar. Üst piston, 20 in³ (327,8 cm³) hacminde akışkanı yerinden oynatır — ve alt silindir pistonu da aynı 20 in³ (327,8 cm³) hacminde akışkan tarafından yerinden oynatılır.
Bir hidrolik silindirin piston milinin hızı, pistonun arkasındaki odayı akışkanın ne kadar hızlı doldurduğuna bağlıdır. Piston mil hızı formülleri:
Mil hızı (in/dakika) = Akış hızı (gpm) × 231 ÷ Piston alanı (in²)
Mil hızı (m/sn) = Akış hızı (L/dk) × 0,1667 ÷ Piston alanı (cm²)

Hidrolik motor, hidrolik enerjiyi dönme hareketi yapan mekanik enerjiye dönüştüren bir aktüatördür. Bu dönme enerjisi, tahrik mili aracılığıyla yük üzerine uygulanır.
Tüm hidrolik motorlar temelde giriş ve çıkış portlarına sahip bir muhafaza ile tahrik miline bağlı dönen bir montajdan oluşur.
Gösterilen örnek, bir kanatçık tipi hidrolik motordur. Dönme tertibatı, rotor yuvalarına serbestçe içeri ve dışarı kayabilen bir rotor ve kanatçıklardan oluşur. Dönme tertibatı, muhafaza içinde eksantrik olarak monte edilmiştir; tahrik mili yük ile bağlantılıdır. Basınçlı yağ giriş odasına girdiğinde, hidrolik enerji giriş odasındaki açık kanatçık yüzeyine etki eder. Üst kanatçığın basınçlı yağa maruz kalan alanı daha büyük olduğu için rotora etki eden kuvvet dengesizdir — bu nedenle rotor döner.
Yağ, hacmi azalan çıkış odasına ulaştığında buradan dışarı atılır.
Not: Bu tip motorun normal çalışabilmesi için kanatçıkların uzatılmış olması ve muhafaza ile güvenilir bir sızdırmazlık oluşturması gerekir. Hidrolik pompa aksine, kanatçıklar merkezkaç kuvvetiyle dışarı doğru itilemez — motor kanatçıklarının uzatılmasının yöntemi, ilerideki bir bölümde ele alınacaktır.
Şekil 6-6: Kanatlı motorun çalışması. Basınçlı yağ, kanat yüzeylerine etki eder. Üst kanadın basınca maruz kalan alanı, alt kanadın basınca maruz kalan alanından daha büyük olduğu için net kuvvet rotoru döndürür.
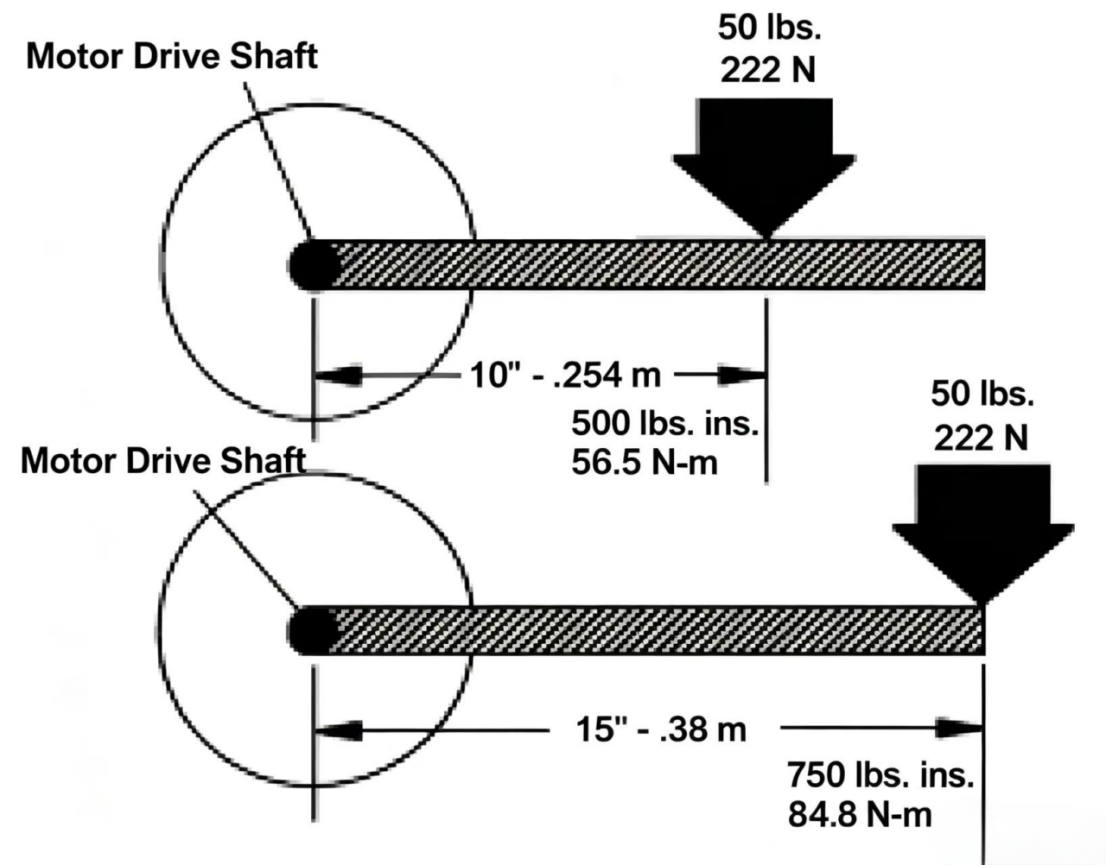
Tork, dönme veya burma kuvvetidir. Tork, bir şaft merkez çizgisinden belirli bir mesafede etki eden bir kuvvettir. Tork birimi lb.in. (veya Nm)’dir.
Tork, kuvvetin hidrolik motor şaftı merkez çizgisine göre konumunu bize gösterir. Tork formülü şöyledir:
Tork = Kuvvet × Şaft merkezinden uzaklık
(lb.in.) = (lb) × (in.) veya (Nm) = (N) × (m)
Şekilden bir örnek: Motor miline bağlı bir krank üzerine 50 lbs (222 N)’luk bir kuvvet etki eder. Mil merkezi ile kuvvet arasındaki mesafe 10 inç (0,254 m)’dir. Mil üzerinde oluşan tork 500 in.lbs (56,5 Nm)’dir. Aynı 50 lbs (222 N) kuvveti 15 inçlik (0,38 m) bir krank koluna uygulanırsa, mile etki eden tork 750 in.lbs (84,6 Nm) olur. Kuvvetin mil merkezinden uzaklığı arttıkça tork da artar. Torkun oluşması için herhangi bir hareket gerekmez.
Motor tahrik miliyle bağlantılı bir yük, yukarıda açıklandığı gibi tork üretir. Hidrolik motor için bu dirençtir — hidrolik basınç tarafından, motorun dönen parçası üzerinde uygulanarak yenilmesi gerekir.
Tork (in.lbs) = psi × Motor deplasmanı (in³) ÷ (2 × π)
Tork (Nm) = bar × Motor deplasmanı (cm³) ÷ (20 × π)
Hidrolik motor mil devri, akışkanın ne kadar hızlı enjekte edildiğiyle belirlenir. Formül şu şekildedir:
Motor devri (rpm) = Akış hızı (gpm) × 231 ÷ Motor deplasmanı (in³/dev)
Motor devir sayısı (rpm) = Debisi (L/dk) × 1000 / Motor hacmi (ml/dev)
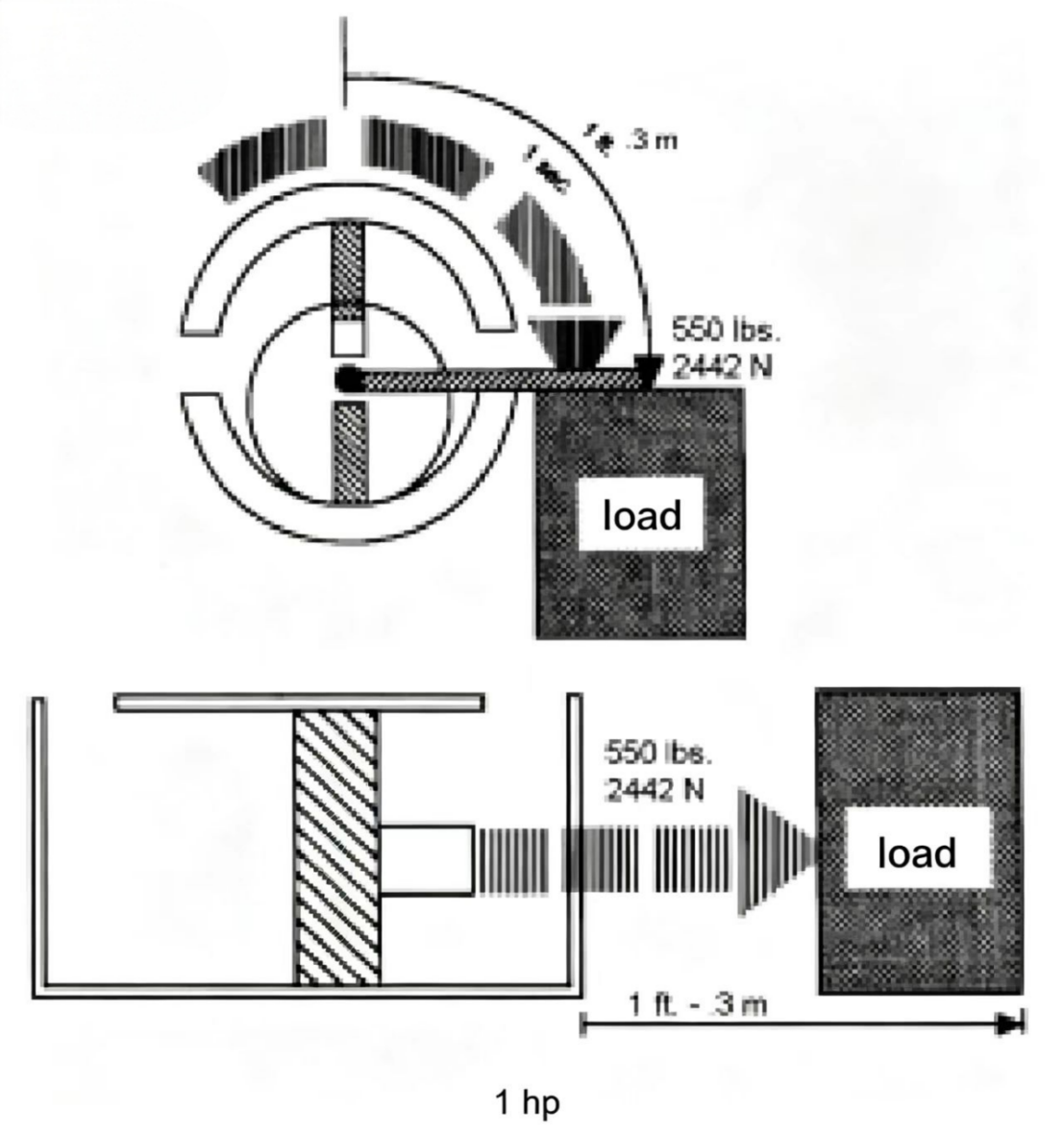
Daha önceki bölümlerde, gücü iş yapma hızı olarak tanımladığımızı öğrenmiştik; yani BG = ft·lb/zaman ya da W = J/zaman.
Ayrıca beygir gücü (BG) veya watt (W) birimlerinin gücün birimi olduğunu biliyoruz. Eğer bir hidrolik silindir ya da hidrolik motor, 550 lb (2.442 N)’lık mekanik kuvvetle bir yükü hareket ettirip 1 saniyede 1 ft (0,30 m) ileriye götürürse, bu işlem için 1 BG (746 W) güç harcanmış demektir. Aynı iş (550 ft·lb / 746 J), yarım saniyede yapılmışsa çalışma hızı iki katına çıkar ve güç 2 BG (1.490 W) olur.
Bir silindir veya motor tarafından bir yüke iletilen mekanik güç, silindir veya motorun gerektirdiği hidrolik güce eşittir. 550 ft.lbs/sn (746 J) oranında iş yapan bir hidrolik sistemin hidrolik gücü 1 BG (746 W)’dır. Ancak mekanik güç formülünde "ft (m)" ve "lbs (N)" terimleri, hidrolik terimler olan "psi (bar)" ve "gpm (L/dk)" ile değiştirilir. Hidrolik güç hesaplamalarında, gpm, psi, ft ve lbs (veya L/dk, bar, m ve N) arasındaki ilişkiyi ifade etmek için bir dönüştürme katsayısı kullanılır.
Bir hidrolik silindirin veya tamamı hidrolik sistemin gücünü hesaplamak için:
bG = gpm × psi × 0,000583
W = BG × 746
W = (5/3) × L/dk × bar
Hidrolik motor çıkış gücünü hesaplamak için:
bG = dev/dk × Tork (in.lbs) ÷ 63.025
kW = dev/dk × Tork (Nm) ÷ 9.543
Şimdiye kadar döner çıkışlı hidrolik motorlar ve doğrusal çıkışlı hidrolik silindirler hakkında konuştuk. Şimdi, sınırlı açıda dönme hareketi üreten başka bir aktüatör türünü ele alacağız. Bu tür, salınımlı silindir veya salınımlı motor olarak adlandırılır. Yapısı kompakt, basit ve verimlidir; yüksek tork üretir ve yalnızca küçük bir montaj alanı gerektirir; ayrıca montajı kolaydır.
Salınımlı aktüatörler, makine tezgâhları için indeksleme, bükme işlemleri, ağır nesnelerin kaldırılması veya döndürülmesi, çevrilmesi, konumlandırılması, işlenecek parçaların sabitlenmesi için özel aparatlar, denizcilik kontrolleri, valf çalıştırılması gibi alanlarda kullanılır.
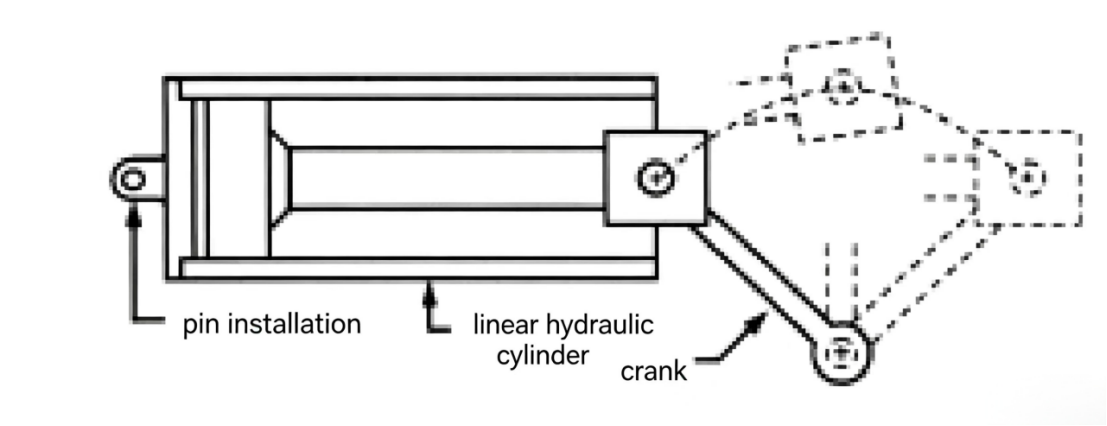
Birçok çeşit salınımlı silindir bulunmaktadır. En basiti, doğrusal hidrolik silindir ile tahrik edilen salınımlı mekanizmadır; burada silindir gövdesinin ucu bir pimle sabitlenir ve piston milinin ucu, bir şaftı döndüren bir kranka bağlanır. Bu salınımlı silindir, 4 yollu yön kontrol valfi ile kontrol edilebilir; strokun her iki ucunda sınır anahtarları bulunur.
Tüm mekanik cihazlar gibi bu doğrusal silindir tabanlı salınımlı aktüatörün de bazı temel özellikleri vardır; örneğin standart, piyasada kolayca bulunan parçalardan monte edilebilmesi, tasarımcılara büyük esneklik kazandırması ve yedek parçaların kolay temini sayesinde maliyetlerin düşük tutulması.
Ancak bu tür salınımlı aktüatörlerin istenmeyen özellikleri de vardır: piston milinin korunmamış olması ve çevresel ortamla doğrudan temas etmesi, özellikle krank mekanizmasının genellikle sızdırmaz olmaması nedeniyle güvenlik riskleri oluşturur. Ayrıca tahrik mili genellikle büyük yan yükler taşır; bu da erken arıza, aşırı aşınma ve sıkışmaya neden olur.
Bu özel tür salınımlı aktüatör için hidrolik silindirin serbestçe salınabilmesi gerekir; bu nedenle esnek hortum bağlantıları kullanılmalıdır ve silindir stroku boyunca çıkış torku sabit değildir.
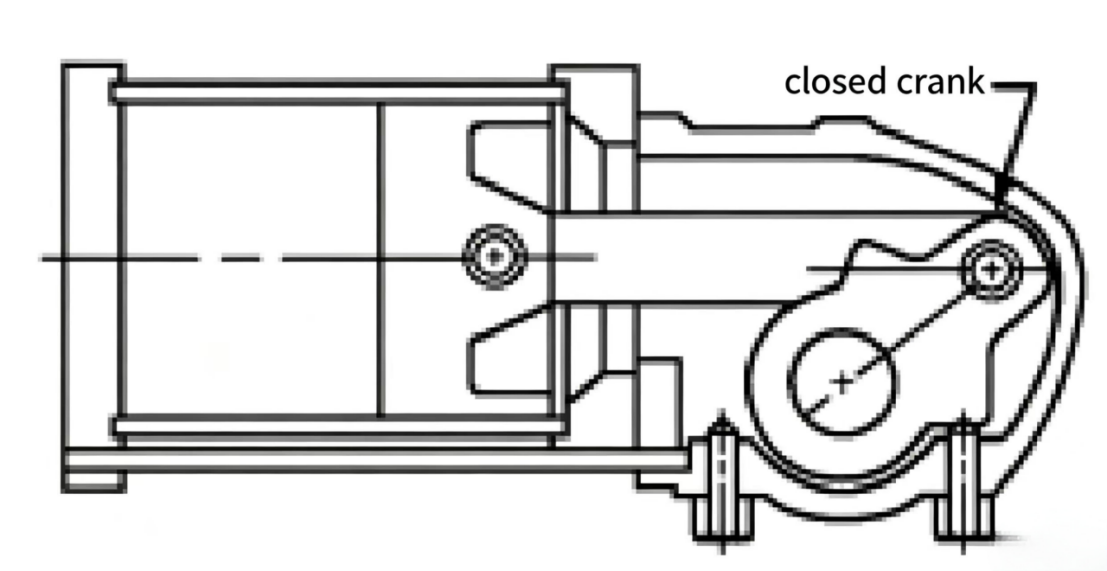
Kapalı salınımlı silindir, yukarıdaki doğrusal silindire dayalı salınımlı mekanizmaya çok benzer. Kapalı silindirin piston milini ve krankı çevreleyen koruyucu bir kapak vardır. Tahrik mili genellikle şiddetli yanal yükleri önlemek için ekstra yatak desteğiyle donatılmıştır. Bu tip, bobin valfler, limit anahtarları veya strok anahtarlarıyla donatılabilir. Strok aralığı genellikle yaklaşık 85° ile 100° arasında ayarlanabilir.
Başka bir tip ise tahrik milini orijinal konumuna döndürmek için bir geri dönüş yaylı hidrolik silindir kullanan yay geri dönüşlü salınımlı silindirdir. Yay geri dönüşlü salınımlı silindirler, maksimum 5.000 in.lbs (565 Nm) tork çıkışı sağlayabilir.

En yaygın salınım silindiri, dişli çark ve dişli tipidir. Bu tip, tam dönüş boyunca her iki yönde de sabit çıkış torkunu koruyabilir. Bu yapıda hidrolik basınç piston üzerine etki eder ve pistona bağlı dişliyi iter; bu da dişli çarkı döndürerek milin dönmesini sağlar. Standart dişli çark ve dişli silindirlerin dönüş stroku 90°, 180°, 360° veya daha büyük değerlerde olabilir. Dişli çark ve dişli silindirlerin çıkış torku 52.000.000 in.lbs (5.876.000 Nm) değerine ulaşabilir.

Ayrıca yaprak tipi salınım motoru da mevcuttur. Bu tip tek yapraklı veya çok yapraklı olabilir. Tek yapraklı bir motor 280° dönebilir; çift yapraklı bir motor ise 200° dönebilir. Çift yapraklı motorun çıkış torku, tek yapraklı motorunkinin iki katıdır. Bu tür salınım motorları, çıkış torkunu 500.000 in.lbs (Nm) değerine kadar artırabilir.

Torku bir helisel dişli mekanizması kullanarak üreten başka bir tür salınımlı motor vardır. Dişli uzunluğundaki ve adımdaki değişiklikler, dönme strokunun geniş bir aralıkta değişmesine olanak tanır. Bu tür salınımlı motor, şaft üzerinde içten dişli bir piston kılıfına sahip tek bir helisel dişli şafttan oluşur; piston kılıfının dönmesi, yönlendirici çubuklar tarafından sınırlandırılır. Piston kılıfı silindirin içinde hareket ettiğinde, dişli şaftı döndürür. Standart dönme strokları 90°, 180°, 270° ve 360°’dir; çıkış torkları en fazla 1.000.000 in.lbs (13.000 Nm) değerine ulaşabilir.
Zincir ve dişli salınımlı motorlar, şaftı harekete geçirmek için pistonlar, zincirler ve dişliler kullanır. Bu aktüatör genellikle zinciri çekmek amacıyla bir büyük piston (hareket kaynağı olarak) ve geri dönüş zinciri yolundan yağ sızıntısını önlemek amacıyla küçük bir piston içerir. Çıkış torkları yaklaşık 23.000 in.lbs (2.599 Nm) değerine ulaşabilir; tahrik şaftının dönmesi beş tam devir veya 1.800°’ye kadar olabilir.
Belirli bir uygulama için en uygun salınımlı silindiri seçerken tork, hız ve çalışma yöntemi eşleştirmesi gibi faktörlerin tümü dikkate alınır. Gerçek bir salınımlı motor seçimi, başka bir bölümde açıklanacaktır; ayrıca tek etkili mi çift etkili mi kullanılacağı, kapalı çevrim konumlandırma sisteminin gerekip gerekmediği, yumuşatma (cushioning) ihtiyacının olup olmadığı gibi konular da ayrıntılı olarak ele alınacaktır. Çalışma frekansı ya da çevrim süresi de incelenecektir.
Aktüatör hızı, debi oranına (gpm (L/dak)) bağlıdır
Hidrolik silindir piston milinin doğrusal hızı, pompanın silindir piston odasına akışkanı pompalama hızına (gpm (L/dak)) bağlıdır. Hidrolik motor tahrik mili dönüş hızı ise hidrolik motora verilen debi oranına (gpm (L/dak)) bağlıdır.
Aktüatör çıkış kuvveti, basınca (psi (bar)) bağlıdır
Bir silindirin çıkış kuvveti psi (bar) cinsinden ifade edilir; bir motor tahrik mili üzerindeki çıkış kuvveti, motorun dönen montajının açıkta kalan alanına etki eden basınçla belirlenir. Bir aktüatör tarafından üretilen güç, aktüatör hızı ile aktüatör çıkış kuvvetinin çarpımına bağlı bir fonksiyondur.
Silindirler için çıkış kuvveti psi cinsinden, piston milinin hızı ise gpm cinsinden ifade edilir. 0,000583 sabiti, psi, gpm ve güç arasındaki ilişkiyi tanımlar. Motorlar için çıkış kuvveti tork cinsinden, motor çalışma hızı ise devir/dakika (rpm) cinsinden ifade edilir. 63.025 sabiti, rpm, tork ve güç arasındaki ilişkiyi tanımlar.

HOVOO'ya hoş geldiniz, bir Çin mühür fabrikası. PU, Gumus ve PTFE mühürlerinin üretimi. Mühürler O-ring, piston mühürü, çubuk mühürü, Gray ring ve gaz mühürü içerir.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}