چین، نانجینگ، گولو ضلع، موفو ای روڈ نمبر 33-99 [email protected] | [email protected]
چین، نانجینگ، گولو ضلع، موفو ای روڈ نمبر 33-99 [email protected] | [email protected]

ہائیڈرولک سلنڈر ہائیڈرولک توانائی کو سیدھی لکیری یا لینیئر مکینیکل حرکت میں تبدیل کرتا ہے۔ اسے کسی حرکت پذیر لوڈ سے منسلک کرنے پر یہ کام کرتا ہے۔
پچھلے ابواب میں جیسا کہ پیش کیا گیا تھا، ایک ہائیڈرولک سلنڈر کا بنیادی طور پر ایک بیرل، دو بند آخری ڈھکن، ایک پسٹن، ایک پسٹن راڈ، اور ان لیٹ اور آؤٹ لیٹ دروازے ہوتے ہیں۔ ہر ایک سرے پر ایک دروازہ ہوتا ہے — ایک تیل کے داخلے کے لیے اور دوسرا تیل کے خارج ہونے کے لیے۔
شکل 6-1 معیاری ڈبل ایکشن ہائیڈرولک سلنڈر۔ تیل بائیں طرف کے دروازے سے داخل ہوتا ہے جس سے کنیکٹنگ راڈ نکلتی ہے؛ دائیں طرف کے دروازے سے تیل داخل ہونے سے وہ واپس سمٹ جاتی ہے۔
سلنڈر کے پورے سٹروک کے دوران ہائیڈرولک توانائی متحرک پستون پر عمل کرتی ہے۔ اس ہائیڈرولک توانائی کی وجہ سے پیدا ہونے والے دباؤ کی حد لوڈ کی طرف سے پیدا ہونے والے مقابلے سے زیادہ نہیں ہوگی۔ کسی معلوم ابعاد کے سلنڈر کے لیے، ہمیں یہ جاننا ضروری ہے کہ کونسا کام کرنے والا دباؤ ایک مخصوص آؤٹ پٹ قوت پیدا کرتا ہے۔ اسے (کشیدگی کو نظرانداز کرتے ہوئے) درج ذیل فارمولے کے ذریعے معلوم کیا جا سکتا ہے:
دباؤ = قوت ÷ رقبہ
اس فارمولے کو استعمال کرتے وقت، یا تو رقبہ اور دباؤ دیا ہوتا ہے تاکہ آؤٹ پٹ قوت معلوم کی جا سکے، یا پھر رقبہ اور آؤٹ پٹ قوت معلوم ہوتے ہیں تاکہ دباؤ معلوم کیا جا سکے۔ عملی طور پر، ہم عام طور پر سلنڈر بور کا قطر جانتے ہیں اور پستون کے رقبے کا حساب لگانے کی ضرورت ہوتی ہے — لیکن ایک دائرے کے رقبے کا حساب لگانا ایک مربع کے رقبے کا حساب لگانے جتنا ہی آسان ہے۔
دائرے کا رقبہ تقریباً اس مربع کے رقبے کا 78.54% ہوتا ہے جس کا ایک ضلع دائرے کے قطر کے برابر ہوتا ہے۔ زیادہ درست طور پر:
دائرے کا رقبہ = قطر² × 0.7854
دوسری عام طور پر استعمال ہونے والی فارمولا:
دائرے کا رقبہ = π × D² ÷ 4

شکل 6-2 دائرہ کا رقبہ = D² × 0.7854۔ یہ سادہ فارمولہ ہائیڈرولک سلنڈر کے حسابات میں مستقل طور پر استعمال ہوتا ہے۔
ہائیڈرولک توانائی کے عمل کا فاصلہ تعین کرتا ہے کہ کتنے کام کا انجام دیا جاتا ہے — یہ فاصلہ سلنڈر اسٹروک کہلاتا ہے۔ جیسا کہ پہلے بیان کیا گیا، زور کو بڑھانے کے لیے ہائیڈرولک دباؤ کا استعمال کرنے کا نتیجہ کچھ نہیں لگتا۔ کچھ خاص حالات میں — جب نظام ساکن ہو — ایک چھوٹا سا زور بظاہر کسی قربانی کے بغیر انتہائی بڑا زور پیدا کر سکتا ہے۔ لیکن اگر اس بڑھے ہوئے زور کی وجہ سے حرکت بھی پیدا ہو تو کچھ قربانی دینی پڑتی ہے: فاصلہ۔
ہر ہائیڈرولک سلنڈر کا ایک حجم (ڈسپلیسمنٹ) ہوتا ہے جو اس کے اسٹروک (انچ میں) کو اس کے پستون کے رقبہ (انچ² میں) سے ضرب دینے کے برابر ہوتا ہے، جس سے حجم انچ³ (سم³) میں حاصل ہوتا ہے۔
سلنڈر کا حجم = پستون کا رقبہ × اسٹروک
(انچ³) = (انچ²) × (انچ) یا (سم³) = (سم²) × (سم)
مثال: اوپری پستون کو 2 انچ (5.08 سینٹی میٹر) حرکت کرنی ہوتی ہے تاکہ نیچے والے سلنڈر کا پستون 1 انچ (2.54 سینٹی میٹر) حرکت کرے۔ دونوں پستون ایک ہی کام کرتے ہیں۔ اوپری پستون 20 انچ³ (327.8 سینٹی میٹر³) سیال کو جگہ سے ہٹاتا ہے — اور نیچے والے سلنڈر کے پستون کو بھی اسی 20 انچ³ (327.8 سینٹی میٹر³) سیال کے ذریعے جگہ سے ہٹایا جاتا ہے۔
ہائیڈرولک سلنڈر کے پستون راڈ کی رفتار اس بات پر منحصر ہوتی ہے کہ سیال پستون کے پیچھے کے کمرے میں کتنی تیزی سے بھرتا ہے۔ پستون راڈ کی رفتار کے فارمولے:
راڈ کی رفتار (انچ/منٹ) = فلو ریٹ (گیلن فی منٹ) × 231 ÷ پستون کا رقبہ (انچ²)
راڈ کی رفتار (میٹر/سیکنڈ) = فلو ریٹ (لیٹر فی منٹ) × 0.1667 ÷ پستون کا رقبہ (سینٹی میٹر²)

ہائیڈرولک موٹر ایک ایکچویٹر ہے جو ہائیڈرولک توانائی کو گھومتی ہوئی مکینیکل توانائی میں تبدیل کرتا ہے۔ یہ گھومتی ہوئی توانائی ڈرائیو شافٹ کے ذریعے لوڈ پر لاگو کی جاتی ہے۔
تمام ہائیڈرولک موٹرز بنیادی طور پر ایک ہاؤسنگ سے تشکیل دی گئی ہوتی ہیں جس میں ان لیٹ اور آؤٹ لیٹ پورٹس ہوتے ہیں، اور ایک گھومنے والی اسمبلی جو ڈرائیو شافٹ سے منسلک ہوتی ہے۔
دکھایا گیا مثال ایک وین-ٹائپ ہائیڈرولک موٹر ہے۔ گھومنے والی اسمبلی میں ایک روٹر اور وینز شامل ہیں جو روٹر کے سلوٹس میں آزادانہ طور پر اندر اور باہر سلائیڈ کر سکتی ہیں۔ گھومنے والی اسمبلی کو ہاؤسنگ کے اندر غیر مرکزی طور پر لگایا گیا ہے؛ ڈرائیو شافٹ لوڈ سے منسلک ہوتی ہے۔ جب دباؤ والی تیل ان لیٹ کمرے میں داخل ہوتی ہے، تو ہائیڈرولک توانائی ان لیٹ کمرے میں دباؤ والی تیل کے معرضِ عمل آنے والے وین کے رخ کے خلاف کام کرتی ہے۔ چونکہ اوپری وین کا وہ حصہ جو دباؤ والی تیل کے معرضِ عمل میں ہے اس کا رقبہ بڑا ہوتا ہے، اس لیے روٹر پر قوت غیر متوازن ہوتی ہے — روٹر گھومتا ہے۔
جب تیل آؤٹ لیٹ کمرے تک پہنچتی ہے جہاں حجم کم ہو رہا ہوتا ہے، تو اسے خارج کر دیا جاتا ہے۔
نوٹ: اس قسم کے موٹر کے معمول سے کام کرنے سے پہلے، وینز کو پھیلا دینا ضروری ہے اور انہیں ہاؤسنگ کے ساتھ قابل اعتماد سیل فراہم کرنا ضروری ہے۔ ایک ہائیڈرولک پمپ کے برعکس، وینز کو مرکزیت کی قوت (سینٹری فیوگل فورس) کے ذریعے باہر نہیں دھکیلا جا سکتا — موٹر کی وینز کو پھیلانے کا طریقہ بعد کے باب میں بیان کیا جائے گا۔
شکل 6-6: وین موٹر کا عمل۔ دباؤ والے تیل کا اثر وین کے رُخوں پر ہوتا ہے۔ چونکہ دباؤ کے ماتحت اوپری وین کا رقبہ نچلی وین کے رقبے سے بڑا ہوتا ہے، لہٰذا خالص قوت روتور کو گھمائے گی۔
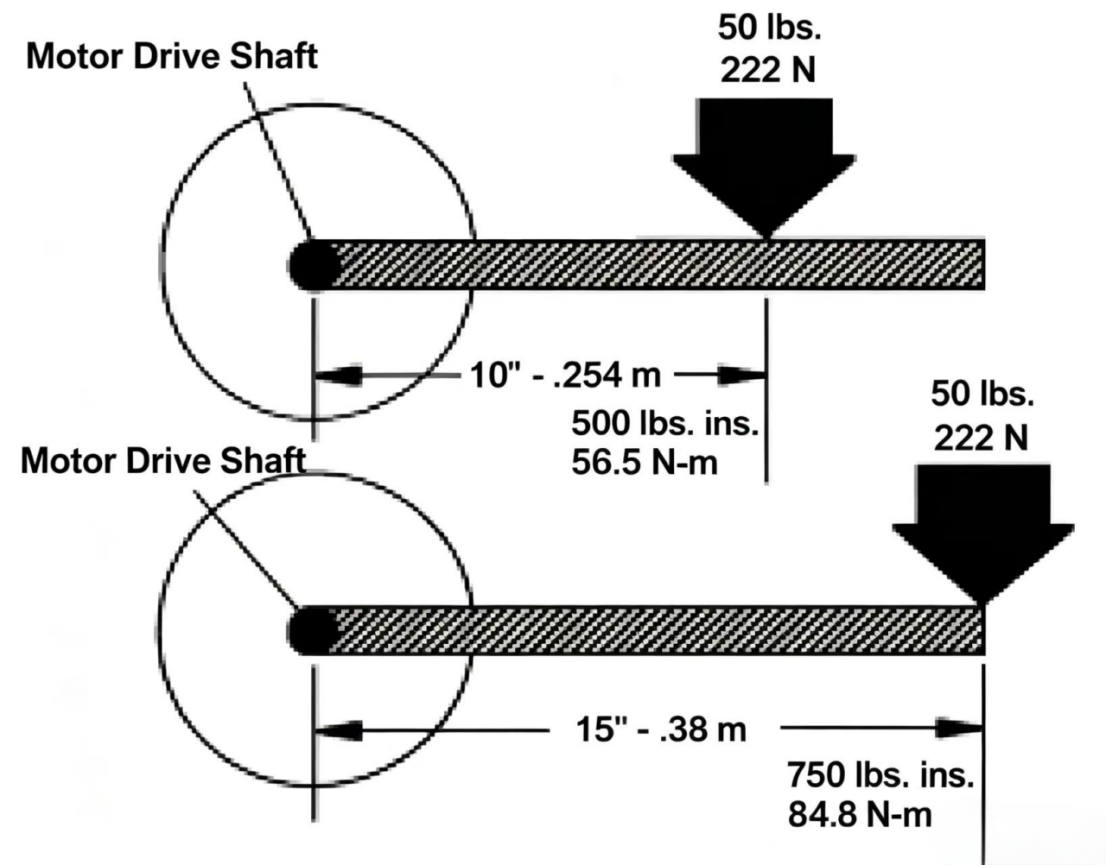
ٹارک ایک گھماؤ یا موڑنے والی قوت ہے۔ ٹارک ایک ایسی قوت ہے جو شافٹ کی مرکزی لکیر سے کسی فاصلے پر عمل کرتی ہے۔ ٹارک کا اکائی پاؤنڈ-انچ (یا نیوٹن-میٹر) ہے۔
ٹارک ہمیں ہائیڈرولک موٹر کی شافٹ کی مرکزی لکیر کے حوالے سے قوت کی مقامیت بتاتا ہے۔ ٹارک کا فارمولا درج ذیل ہے:
ٹارک = قوت × شافٹ کی مرکزی لکیر سے فاصلہ
(پاؤنڈ-انچ) = (پاؤنڈ) × (انچ) یا (نیوٹن-میٹر) = (نیوٹن) × (میٹر)
شکل سے ایک مثال: ایک 50 پاؤنڈ (222 نیوٹن) کا زور موٹر شافٹ سے جڑے کرینک پر عمل کرتا ہے۔ شافٹ کے مرکز اور زور کے درمیان فاصلہ 10 انچ (0.254 میٹر) ہے۔ شافٹ پر حاصل ہونے والی ٹارک 500 انچ-پاؤنڈ (56.5 نیوٹن میٹر) ہے۔ اگر وہی 50 پاؤنڈ (222 نیوٹن) زور 15 انچ (0.38 میٹر) لمبے کرینک آرم پر عمل کرے، تو شافٹ پر ٹارک 750 انچ-پاؤنڈ (84.6 نیوٹن میٹر) ہوگی۔ زور جتنی دور شافٹ کے مرکز سے لگے گا، ٹارک اتنی ہی زیادہ ہوگی۔ نوٹ کریں کہ ٹارک میں کوئی حرکت شامل نہیں ہوتی۔
موٹر ڈرائیو شافٹ سے جڑے ہوئے لوڈ کے ذریعے اوپر بیان کردہ طریقے سے ٹارک پیدا ہوتی ہے۔ ہائیڈرولک موٹر کے لیے، یہ مزاحمت ہوتی ہے — جسے ہائیڈرولک دباؤ کے ذریعے موٹر کے گھومتے ہوئے اسمبلی پر عمل کرکے دور کرنا ضروری ہوتا ہے۔
ٹارک (انچ-پاؤنڈ) = PSI × موٹر ڈسپلیسمنٹ (انچ³) ÷ (2 × π)
ٹارک (نیوٹن میٹر) = بار × موٹر ڈسپلیسمنٹ (سم³) ÷ (20 × π)
ہائیڈرولک موٹر شافٹ کی رفتار اس بات پر منحصر ہوتی ہے کہ سیال کتنی تیزی سے داخل کیا جا رہا ہے۔ فارمولا درج ذیل ہے:
موٹر کی رفتار (آر پی ایم) = فلو ریٹ (گیلن فی منٹ) × 231 ÷ موٹر ڈسپلیسمنٹ (انچ³/ریو)
موٹر کی رفتار (آر پی ایم) = فلو ریٹ (لیٹر فی منٹ) × 1000 ÷ موٹر ڈسپلیسمنٹ (ملی لیٹر فی ریوولوشن)
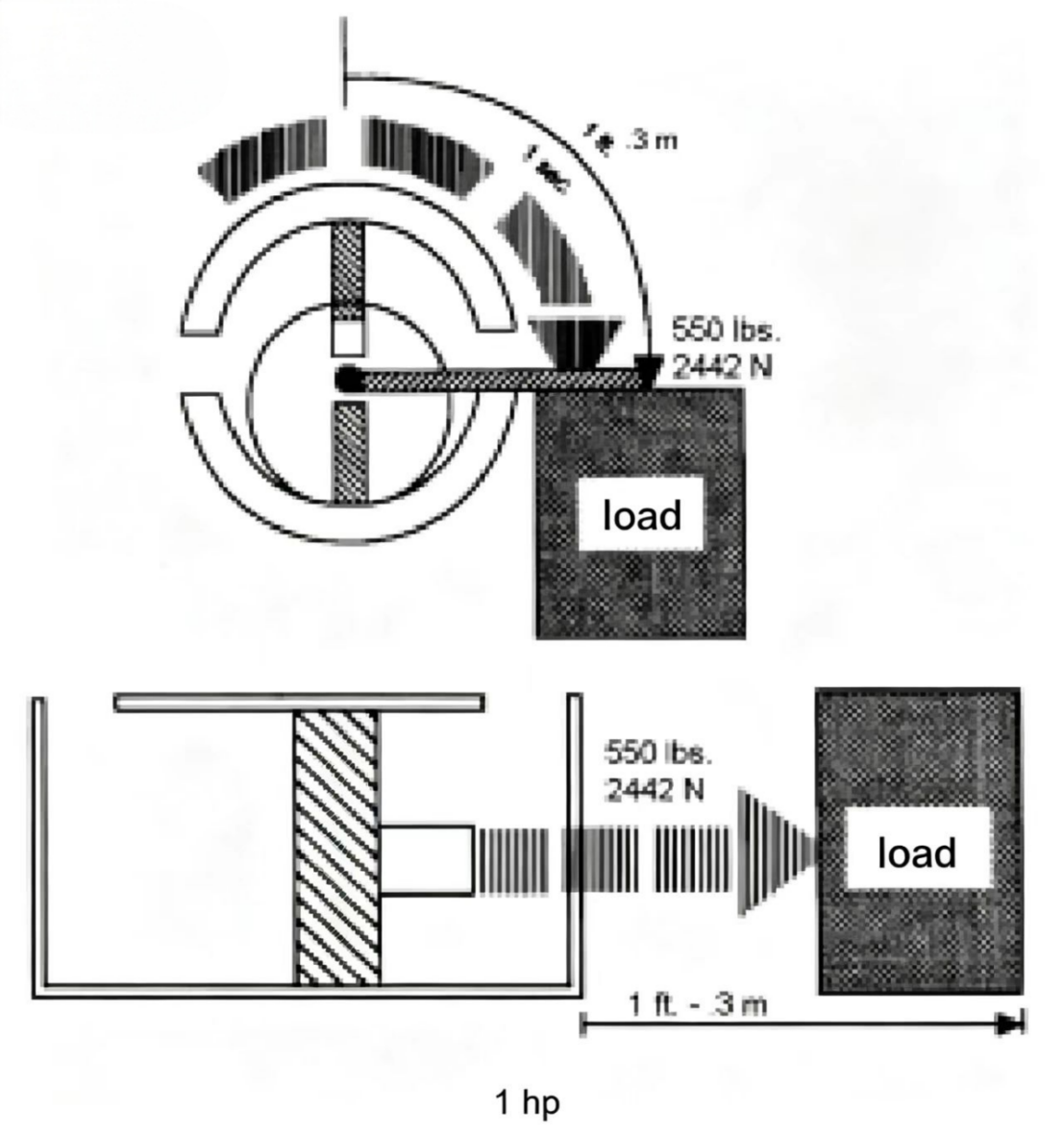
اگلے بابوں میں ہم نے سیکھا کہ طاقت کام کرنے کی شرح ہوتی ہے، یعنی ایچ پی = فٹ.پاؤنڈز / وقت، یا ویٹ = جول / وقت۔
ہم یہ بھی جانتے ہیں کہ ہارس پاور (ایچ پی) یا واٹ (وی) طاقت کا اکائی ہے۔ اگر ایک ہائیڈرولک سلنڈر یا ہائیڈرولک موٹر 550 پاؤنڈز (2,442 نیوٹن) کے مکینیکل زور کے ساتھ ایک لوڈ کو 1 فٹ (0.30 میٹر) تک 1 سیکنڈ میں حرکت دیتی ہے، تو اس نے 1 ایچ پی (746 ویٹ) طاقت استعمال کی ہے۔ اگر وہی کام (550 فٹ.پاؤنڈز / 746 جول) آدھے سیکنڈ میں کیا جائے، تو کام کرنے کی رفتار دوگنی ہو جاتی ہے اور طاقت 2 ایچ پی (1,490 ویٹ) ہو جاتی ہے۔
سیلنڈر یا موٹر کے ذریعہ لوڈ تک منتقل کردہ مکینیکل طاقت سیلنڈر یا موٹر کے لیے درکار ہائیڈرولک طاقت کے برابر ہوتی ہے۔ ایک ہائیڈرولک نظام جو 550 فٹ.پاؤنڈ فی سیکنڈ (746 جول) کی شرح سے کام کر رہا ہو، اس کی ہائیڈرولک طاقت 1 ایچ پی (746 ویٹ) ہوتی ہے۔ تاہم، مکینیکل طاقت کے فارمولے میں "فٹ (میٹر)" اور "پاؤنڈ (نیوٹن)" کی جگہ ہائیڈرولک اصطلاحات "پی ایس آئی (بار)" اور "جی پی ایم (لیٹر فی منٹ)" استعمال کی جاتی ہیں۔ ہائیڈرولک طاقت کے حساب کتاب میں ایک تبدیلی کا عامل استعمال کیا جاتا ہے تاکہ جی پی ایم، پی ایس آئی، فٹ اور پاؤنڈ (یا لیٹر فی منٹ، بار، میٹر اور نیوٹن) کے درمیان تعلق کو ظاہر کیا جا سکے۔
ہائیڈرولک سیلنڈر یا مکمل ہائیڈرولک سسٹم کی طاقت کا حساب لگانے کے لیے:
ایچ پی = جی پی ایم × پی ایس آئی × 0.000583
ویٹ = ایچ پی × 746
ویٹ = (5/3) × لیٹر فی منٹ × بار
ہائیڈرولک موٹر کی آؤٹ پٹ طاقت کا حساب لگانے کے لیے:
ایچ پی = آر پی ایم × ٹارک (انچ-پاؤنڈ) ÷ 63,025
کلو واٹ = آر پی ایم × ٹارک (نیوٹن میٹر) ÷ 9,543
اب تک ہم نے گھومنے والی آؤٹ پٹ والے ہائیڈرولک موٹرز اور لکیری آؤٹ پٹ والے ہائیڈرولک سلنڈرز پر بات کی ہے۔ اب ہم ایک اور قسم کے ایکچوایٹر پر بات کریں گے جو محدود زاویہ کا گھماؤ پیدا کرتا ہے۔ اس قسم کو آسیلیٹنگ سلنڈر یا آسیلیٹنگ موٹر کہا جاتا ہے۔ اس کی ساخت کمپیکٹ، سادہ اور موثر ہوتی ہے — یہ اعلیٰ ٹارک پیدا کرتا ہے اور صرف ایک چھوٹی سی انسٹالیشن جگہ کی ضرورت ہوتی ہے، جبکہ انسٹالیشن بھی آسان ہوتی ہے۔
آسیلیٹنگ ایکچوایٹرز کو مشین ٹول انڈیکسنگ، بینڈنگ آپریشنز، بھاری اشیاء کو اٹھانے یا گھمانے، الٹنا، پوزیشننگ، مشیننگ فکسچرز، ناٹیکل کنٹرولز، والو آپریشن وغیرہ کے لیے استعمال کیا جاتا ہے۔
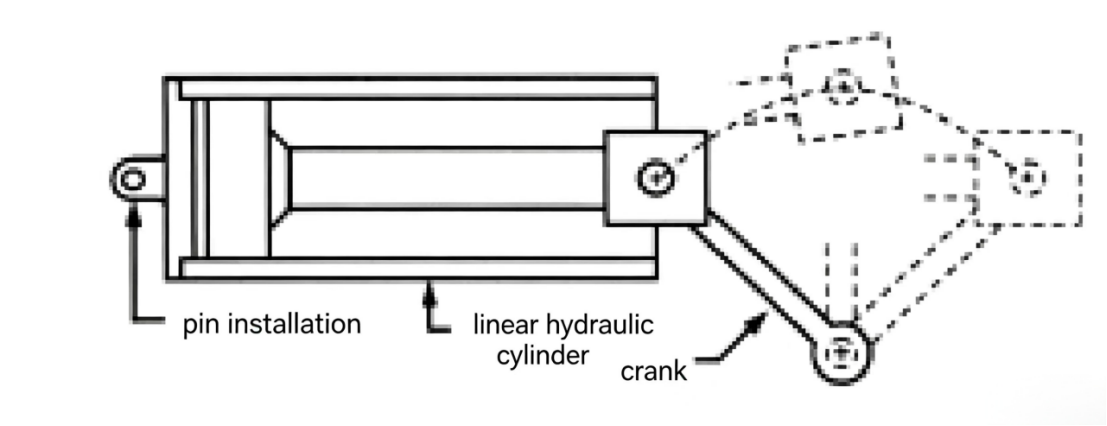
آسیلیٹنگ سلنڈرز کی بہت سی اقسام ہیں۔ سب سے سادہ قسم ایک لکیری ہائیڈرولک سلنڈر کے ذریعے چلائی جانے والی آسیلیٹنگ مکینزم ہے جہاں سلنڈر کا بیرل سر ایک پن کے ساتھ منسلک ہوتا ہے، اور پسٹن راڈ ایک کرینک سے جڑا ہوتا ہے جو ایک شافٹ کو گھمانے کے لیے استعمال ہوتا ہے۔ اس آسیلیٹنگ سلنڈر کو 4-وے ڈائریکشنل والو کے ذریعے کنٹرول کیا جا سکتا ہے، جبکہ سٹروک کے دونوں سروں پر لمٹ سوئچز لگے ہوتے ہیں۔
تمام مکینیکی آلات کی طرح، یہ لکیری سلنڈر پر مبنی دولان کرنے والی ایکٹویٹر کی کچھ بنیادی خصوصیات ہیں، جن میں یہ بھی شامل ہے کہ اسے معیاری، دستیاب اجزاء سے اسمبل کیا جا سکتا ہے، جس سے ڈیزائنرز کو بہت زیادہ لچک حاصل ہوتی ہے اور آسانی سے دستیاب اسپیئر پارٹس کی وجہ سے لاگت بھی کم رہتی ہے۔
تاہم، اس قسم کے آسیلیٹنگ ایکچوایٹر کی بھی نامطلوب خصوصیات ہوتی ہیں: پسٹن راڈ تحفظ سے محروم ہوتا ہے اور براہ راست اپنے اردگرد کے ماحول کے ساتھ رابطہ قائم کرتا ہے، خاص طور پر جب کہ کرینک مکینزم عام طور پر سیل نہیں ہوتا، جس کی وجہ سے حفاظتی خطرات پیدا ہوتے ہیں۔ اس کے علاوہ، ڈرائیو شافٹ عام طور پر بڑے جانبی لوڈ برداشت کرتی ہے، جس کی وجہ سے ابتدائی ناکامی، زیادہ حد تک پہننے کا عمل اور جمنا (Binding) واقع ہوتا ہے۔
اس خاص قسم کے دولان کرنے والے ایکٹویٹر کے لیے، ہائیڈرولک سلنڈر کو آزادانہ جھولنے کی اجازت ہونی چاہیے، اس لیے اس میں لچکدار ہوز کنکشن استعمال کرنے ہوں گے، اور سلنڈر کے پورے سٹروک کے دوران آؤٹ پٹ ٹارک مستقل نہیں ہوتا۔
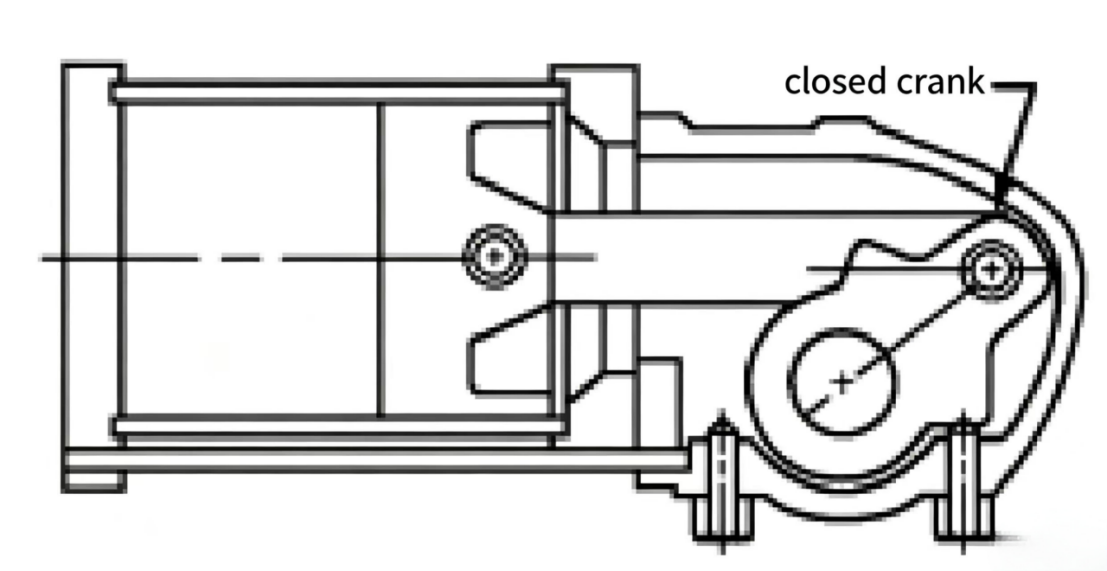
محصور آسیلیٹنگ سلنڈر اوپر دیے گئے لینیئر سلنڈر پر مبنی آسیلیٹنگ مکینزم کے بہت قریب ہوتا ہے۔ اس محصور سلنڈر کا ایک تحفظی ڈھکن ہوتا ہے جو پسٹن راڈ اور کرینک کو گھیرے رکھتا ہے۔ ڈرائیو شافٹ عام طور پر شدید جانبی لوڈز کو روکنے کے لیے اضافی بیئرنگ سپورٹ کے ساتھ فراہم کیا جاتا ہے۔ اس قسم کو سولینائیڈ والوز، لمٹ سوئچز، یا اسٹروک سوئچز کے ساتھ منسلک کیا جا سکتا ہے۔ اسٹروک کی حد عام طور پر تقریباً 85° سے 100° تک ایڈجسٹ کی جا سکتی ہے۔
دوسری قسم سپرنگ ریٹرن آسیلیٹنگ سلنڈر ہے، جو ایک ہائیڈرولک سلنڈر کے ساتھ واپسی کی سپرنگ استعمال کرتی ہے تاکہ ڈرائیو شافٹ کو اس کی اصل پوزیشن پر واپس لایا جا سکے۔ سپرنگ ریٹرن آسیلیٹنگ سلنڈرز 5,000 انچ-پاؤنڈ (565 نیوٹن میٹر) تک ٹارک آؤٹ پٹ کر سکتے ہیں۔

سب سے عام آسیلیٹنگ سلنڈر ریک اینڈ پنیئن کا قسم ہے۔ یہ قسم مکمل گھماؤ کے دوران دونوں سمتوں میں مستقل آؤٹ پُٹ ٹارک برقرار رکھ سکتی ہے۔ اس ترتیب میں، ہائیڈرولک دباؤ پستون پر عمل کرتا ہے، جو پستون سے منسلک ریک کو دباتا ہے، جو پنیئن گیئر کو گھمانے کے لیے شافٹ کو حرکت دیتا ہے۔ معیاری ریک اینڈ پنیئن سلنڈرز کے گھماؤ کے اسٹروک 90°، 180°، 360° یا اس سے بھی زیادہ ہوتے ہیں۔ ریک اینڈ پنیئن سلنڈر کا آؤٹ پُٹ ٹارک 52,000,000 انچ-پاؤنڈ (5,876,000 نیوٹن میٹر) تک پہنچ سکتا ہے۔

وین آسیلیٹنگ موٹر بھی دستیاب ہے۔ یہ قسم سنگل وین یا ملٹی وین کی ہو سکتی ہے۔ ایک سنگل وین موٹر 280° تک گھم سکتی ہے؛ ایک ڈبل وین موٹر 200° تک گھم سکتی ہے۔ ڈبل وین کا آؤٹ پُٹ ٹارک سنگل وین کے مقابلے میں دوگنا ہوتا ہے۔ اس قسم کی آسیلیٹنگ موٹر آؤٹ پُٹ ٹارک کو 500,000 انچ-پاؤنڈ (نیوٹن میٹر) تک حاصل کر سکتی ہے۔

ایک اور قسم کا آسیلیٹنگ موٹر ہوتا ہے جو ہیلیکل اسپلن مکینزم کا استعمال کرتے ہوئے ٹارک پیدا کرتا ہے۔ اسپلن کی لمبائی اور پچ میں تبدیلیوں کی وجہ سے گھماؤ کا اسٹروک وسیع حد تک متغیر ہو سکتا ہے۔ اس قسم کے آسیلیٹنگ موٹر میں ایک ہیلیکل اسپلن شافٹ ہوتی ہے جس پر اندرونی طور پر اسپلنڈ پسٹن سلیو لگی ہوتی ہے — پسٹن سلیو کے گھمنے کو گائیڈ راڈز کے ذریعے روکا جاتا ہے۔ جب پسٹن سلیو سلنڈر کے اندر حرکت کرتی ہے، تو وہ اسپلن شافٹ کو گھمانے کے لیے مجبور کرتی ہے۔ معیاری گھماؤ کے اسٹروک 90°، 180°، 270°، اور 360° ہیں، جن کا آؤٹ پٹ ٹارک 1,000,000 انچ-پاؤنڈ (13,000 نیوٹن میٹر) تک ہو سکتا ہے۔
زنجیر اور اسپروکٹ آسیلیٹنگ موٹرز پسٹن، زنجیریں اور اسپروکٹس کا استعمال کرتے ہوئے شافٹ کو چلاتی ہیں۔ یہ ایکٹویٹر عام طور پر ایک بڑا پسٹن (ڈرائیو ڈیوائس کے طور پر) رکھتا ہے جو زنجیر کو کھینچتا ہے، اور ایک چھوٹا پسٹن جو واپسی کی زنجیر کے راستے سے تیل کے رساو کو روکتا ہے۔ آؤٹ پٹ ٹارک تقریباً 23,000 انچ-پاؤنڈ (2,599 نیوٹن میٹر) تک پہنچ سکتا ہے، اور ڈرائیو شافٹ کا گھماؤ پانچ مکمل گھوماؤ یا 1,800° تک ہو سکتا ہے۔
کسی مخصوص درخواست کے لیے سب سے مناسب آسیلیٹنگ سلنڈر کا انتخاب کرنے کے لیے ٹارک، رفتار اور کام کرنے کے طریقہ کا مطابقت پذیر ہونا ضروری ہے۔ ہم عملی آسیلیٹنگ موٹر کے انتخاب کا تفصیلی بیان ایک دوسرے باب میں دیں گے، اور اس بات پر مزید بحث کریں گے کہ ایک طرفہ یا دو طرفہ کارروائی (سنگل یا ڈبل ایکٹنگ) کا انتخاب کیسے کرنا ہے، کیا بند لوپ پوزیشننگ (کلوزڈ لوپ پوزیشننگ) استعمال کرنی ہے، کیا کشنشدگی (کشننگ) کی ضرورت ہے وغیرہ۔ علاوہ ازیں، کام کرنے کی فریکوئنسی یا سائیکل کا دورانیہ بھی جانچا جائے گا۔
ایکچویٹر کی رفتار فلو ریٹ (گیلن فی منٹ یا لیٹر فی منٹ) پر منحصر ہوتی ہے
ہائیڈرولک سلنڈر کے پسٹن راڈ کی لینیئر رفتار اس رفتار پر منحصر ہوتی ہے جس پر پمپ سلنڈر کے پسٹن کمرے میں سیال داخل کرتا ہے (گیلن فی منٹ یا لیٹر فی منٹ)۔ ہائیڈرولک موٹر کے ڈرائیو شافٹ کی گھومنے کی رفتار اس فلو ریٹ (گیلن فی منٹ یا لیٹر فی منٹ) پر منحصر ہوتی ہے جو ہائیڈرولک موٹر میں داخل کیا جاتا ہے۔
ایکچویٹر کی آؤٹ پٹ قوت دباؤ (پاؤنڈ فی اسکوائر انچ یا بار) پر منحصر ہوتی ہے
سلنڈر کی آؤٹ پُٹ فورس پاؤنڈ فی اسکوائر انچ (بار) میں ظاہر کی جاتی ہے — موٹر ڈرائیو شافٹ پر آؤٹ پُٹ فورس موٹر کے گھومتے ہوئے اسمبلی کے کھلے علاقے پر عمل کرنے والے دباؤ کے ذریعے طے کی جاتی ہے۔ ایک ایکچوایٹر کے ذریعے پیدا ہونے والی طاقت ایکٹوایٹر کی رفتار کو ایکٹوایٹر کی آؤٹ پُٹ فورس سے ضرب دینے کا نتیجہ ہوتی ہے۔
سلنڈرز کے لیے، آؤٹ پُٹ فورس پاؤنڈ فی اسکوائر انچ میں ظاہر کی جاتی ہے، اور پستون راڈ کی رفتار گیلن فی منٹ میں۔ دائمی عدد 0.000583 پاؤنڈ فی اسکوائر انچ، گیلن فی منٹ اور طاقت کے درمیان تعلق کو بیان کرتا ہے۔ موٹرز کے لیے، آؤٹ پُٹ فورس ٹارک میں ظاہر کی جاتی ہے، اور موٹر کی کام کرنے کی رفتار ریولوشنز فی منٹ میں۔ دائمی عدد 63,025 ریولوشنز فی منٹ، ٹارک اور طاقت کے درمیان تعلق کو بیان کرتا ہے۔

ہووو میں خوش آمدید، ایک چینی سیل کارخانہ۔ پی یو، گوم اور پی ٹی ایف ای سیلوں کا تولید۔ سیلوں میں او-رِنگ، پسٹن سیل، رڈ سیل، گرے رِنگ اور گیس سیل شامل ہیں۔



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}