33-99No. Mufu E Rd. Gulou Bezirk, Nanjing, China [email protected] | [email protected]
33-99No. Mufu E Rd. Gulou Bezirk, Nanjing, China [email protected] | [email protected]

Ein hydraulischer Zylinder wandelt hydraulische Energie in geradlinige oder lineare mechanische Bewegung um. Wenn er mit einer beweglichen Last verbunden ist, verrichtet er Arbeit.
Wie in früheren Kapiteln eingeführt, besteht ein hydraulischer Zylinder hauptsächlich aus einem Zylinderrohr, zwei geschlossenen Endkappen, einem Kolben, einer Kolbenstange sowie Ein- und Auslassanschlüssen. Jedes Ende verfügt über einen Anschluss – einen für Öl ein, den anderen für Öl aus.
abbildung 6-1: Standard-Hydraulikzylinder mit doppelter Wirkung. Öl tritt durch den linken Anschluss ein und bewirkt das Ausfahren der Kolbenstange; Öl, das durch den rechten Anschluss eintritt, führt sie zurück.
Während des gesamten Zylinderhubes wirkt hydraulische Energie auf den bewegten Kolben ein. Der durch diese hydraulische Energie erzeugte Druck überschreitet nicht den vom Lastwiderstand erzeugten Widerstand. Bei einem Zylinder mit bekannten Abmessungen müssen wir wissen, welcher Betriebsdruck eine bestimmte Ausgangskraft erzeugt. Dies kann (unter Vernachlässigung der Reibung) mit folgender Formel bestimmt werden:
Druck = Kraft ÷ Fläche
Bei Anwendung dieser Formel sind entweder Fläche und Druck gegeben, um die Ausgangskraft zu berechnen, oder Fläche und Ausgangskraft sind bekannt, um den Druck zu ermitteln. In der Praxis kennen wir meist den Zylinderbohrungsdurchmesser und müssen daher die Kolbenfläche berechnen – doch die Berechnung der Fläche eines Kreises ist genauso einfach wie die Berechnung der Fläche eines Quadrats.
Die Fläche eines Kreises entspricht ungefähr 78,54 % der Fläche eines Quadrats, dessen Seitenlänge dem Durchmesser des Kreises entspricht. Genauer gesagt:
Kreisfläche = Durchmesser² × 0,7854
Eine weitere häufig verwendete Formel:
Kreisfläche = π × D² / 4

Abbildung 6-2 Kreisfläche = D² × 0,7854. Diese einfache Formel wird ständig bei Berechnungen für Hydraulikzylinder verwendet.
Die Strecke, über die hydraulische Energie wirkt, bestimmt die verrichtete Arbeit – diese Strecke ist der Zylinderhub. Wie bereits erwähnt, scheint die Verstärkung einer Kraft mittels hydraulischem Druck nichts zu kosten. In bestimmten Fällen – wenn das System im statischen Zustand ist – kann eine kleine Kraft eine sehr große Kraft erzeugen, ohne dass ein offensichtlicher Aufwand erforderlich wäre. Wenn jedoch diese verstärkte Kraft auch eine Bewegung bewirkt, erfolgt ein Kompromiss: die zurückgelegte Strecke.
Jeder Hydraulikzylinder weist ein Volumen (Hubvolumen) auf, das sich aus seinem Hub (in Zoll) multipliziert mit seiner Kolbenfläche (in Quadratzoll) ergibt und somit ein Volumen in Kubikzoll (cm³) liefert.
Zylindervolumen = Kolbenfläche × Hub
(in³) = (in²) × (in) oder (cm³) = (cm²) × (cm)
Beispiel: Der obere Kolben muss sich um 2 Zoll (5,08 cm) bewegen, damit sich der untere Zylinderkolben um 1 Zoll (2,54 cm) bewegt. Beide Kolben verrichten die gleiche Arbeit. Der obere Kolben verdrängt 20 Kubikzoll (327,8 cm³) Flüssigkeit – und der untere Zylinderkolben wird durch dieselbe Menge Flüssigkeit, nämlich 20 Kubikzoll (327,8 cm³), verdrängt.
Die Geschwindigkeit einer hydraulischen Kolbenstange hängt davon ab, wie schnell Flüssigkeit die Kammer hinter dem Kolben füllt. Formeln für die Kolbenstangengeschwindigkeit:
Kolbenstangengeschwindigkeit (Zoll/Min.) = Förderstrom (Gallonen pro Minute) × 231 ÷ Kolbenfläche (Quadratzoll)
Kolbenstangengeschwindigkeit (m/s) = Förderstrom (Liter pro Minute) × 0,1667 ÷ Kolbenfläche (cm²)

Ein hydraulischer Motor ist ein Stellglied, das hydraulische Energie in rotierende mechanische Energie umwandelt. Diese Rotationsenergie wird über die Antriebswelle auf die Last übertragen.
Alle hydraulischen Motoren bestehen im Wesentlichen aus einem Gehäuse mit Ein- und Auslassanschlüssen sowie einer drehbaren Baugruppe, die mit der Antriebswelle verbunden ist.
Das gezeigte Beispiel ist ein Flügeltyp-Hydraulikmotor. Die rotierende Baugruppe besteht aus einem Rotor und Flügeln, die sich frei in den Rotor-Nuten ein- und ausfahren können. Die rotierende Baugruppe ist exzentrisch innerhalb des Gehäuses montiert; die Antriebswelle verbindet sich mit der Last. Wenn Drucköl in die Einlasskammer eintritt, wirkt die hydraulische Energie auf die im Einlassbereich freiliegende Flügelfläche. Da die Fläche des oberen Flügels, die dem Drucköl ausgesetzt ist, größer ist, ist die Kraft auf den Rotor unausgeglichen – der Rotor dreht sich.
Wenn das Öl mit abnehmendem Volumen die Auslasskammer erreicht, wird es abgeführt.
Hinweis: Damit dieser Motortyp normal arbeiten kann, müssen die Flügel ausgefahren sein und eine zuverlässige Dichtung zum Gehäuse aufweisen. Im Gegensatz zu einer Hydraulikpumpe können die Flügel nicht durch die Zentrifugalkraft nach außen gedrückt werden – das Verfahren zum Ausfahren der Motorflügel wird in einem späteren Kapitel behandelt.
Abbildung 6-6: Funktionsweise eines Flügelmotors. Drucköl wirkt auf die Flügelflächen. Da die obere, dem Druck ausgesetzte Flügelfläche größer ist als die untere Flügelfläche, erzeugt die resultierende Kraft eine Drehbewegung des Rotors.
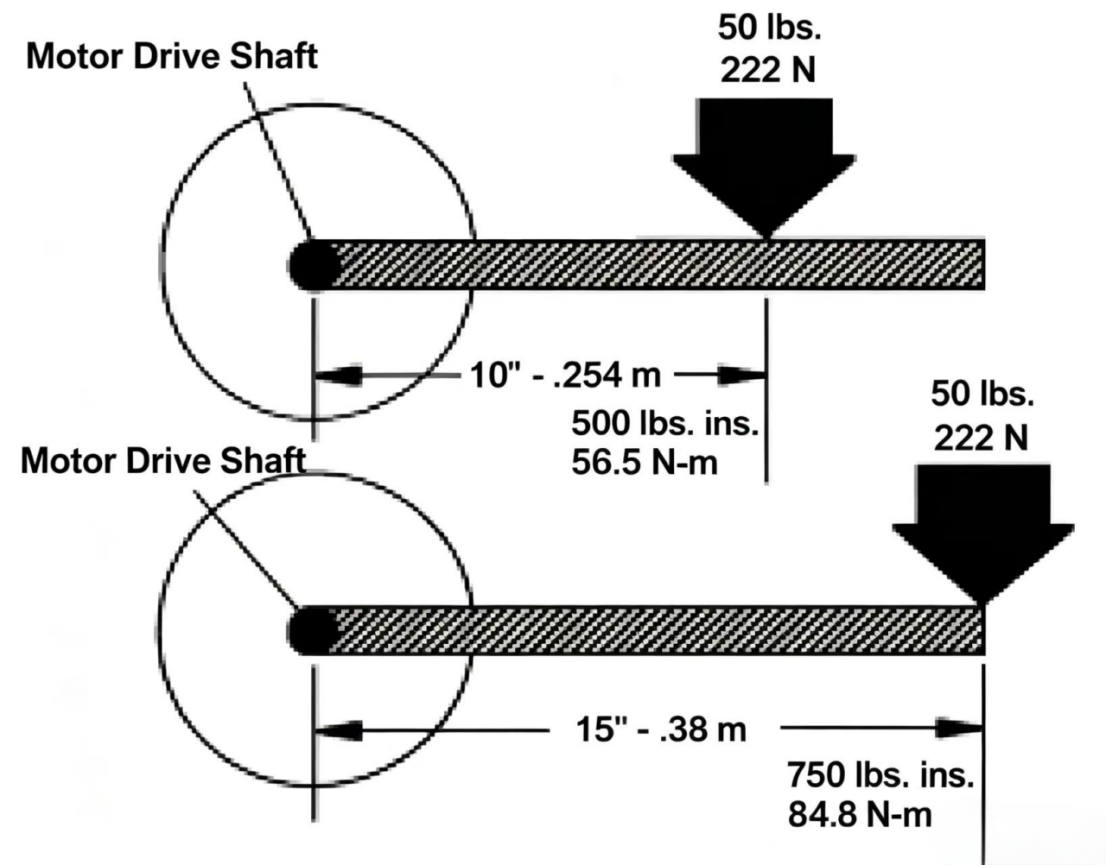
Drehmoment ist eine rotierende oder verdrehende Kraft. Drehmoment ist eine Kraft, die in einem Abstand von der Mittellinie einer Welle angreift. Die Einheit des Drehmoments ist lb·in. (oder Nm).
Das Drehmoment gibt uns die Position der Kraft relativ zur Mittellinie der hydraulischen Motorwelle an. Die Drehmomentformel lautet:
Drehmoment = Kraft × Abstand von der Wellenmittellinie
(lb·in.) = (lb) × (in.) oder (Nm) = (N) × (m)
Beispiel aus der Abbildung: Eine Kraft von 50 lbs (222 N) wirkt auf eine Kurbel, die mit der Motorwelle verbunden ist. Der Abstand zwischen der Wellenmitte und der Kraft beträgt 10 in. (0,254 m). Das resultierende Drehmoment an der Welle beträgt 500 in·lbs (56,5 Nm). Wenn dieselbe Kraft von 50 lbs (222 N) entlang eines 15-in.-Kurbelarms (0,38 m) wirkt, beträgt das Drehmoment an der Welle 750 in·lbs (84,6 Nm). Je weiter die Kraft von der Wellenmitte entfernt wirkt, desto größer ist das Drehmoment. Beachten Sie, dass beim Drehmoment keine Bewegung erforderlich ist.
Eine Last, die mit der Antriebswelle des Motors verbunden ist, erzeugt ein Drehmoment wie oben beschrieben. Bei einem Hydromotor stellt dies einen Widerstand dar – dieser muss durch den hydraulischen Druck überwunden werden, der auf die rotierende Baugruppe des Motors wirkt.
Drehmoment (in·lbs) = psi × Hubvolumen des Motors (in³) / (2 × π)
Drehmoment (Nm) = bar × Hubvolumen des Motors (cm³) / (20 × π)
Die Drehzahl der Hydromotorwelle wird durch die Geschwindigkeit bestimmt, mit der Fluid zugeführt wird. Die Formel lautet:
Motordrehzahl (min⁻¹) = Förderstrom (gpm) × 231 / Hubvolumen des Motors (in³/Umdrehung)
Motordrehzahl (U/min) = Förderstrom (L/min) × 1000 ÷ Motordisplacement (ml/U)
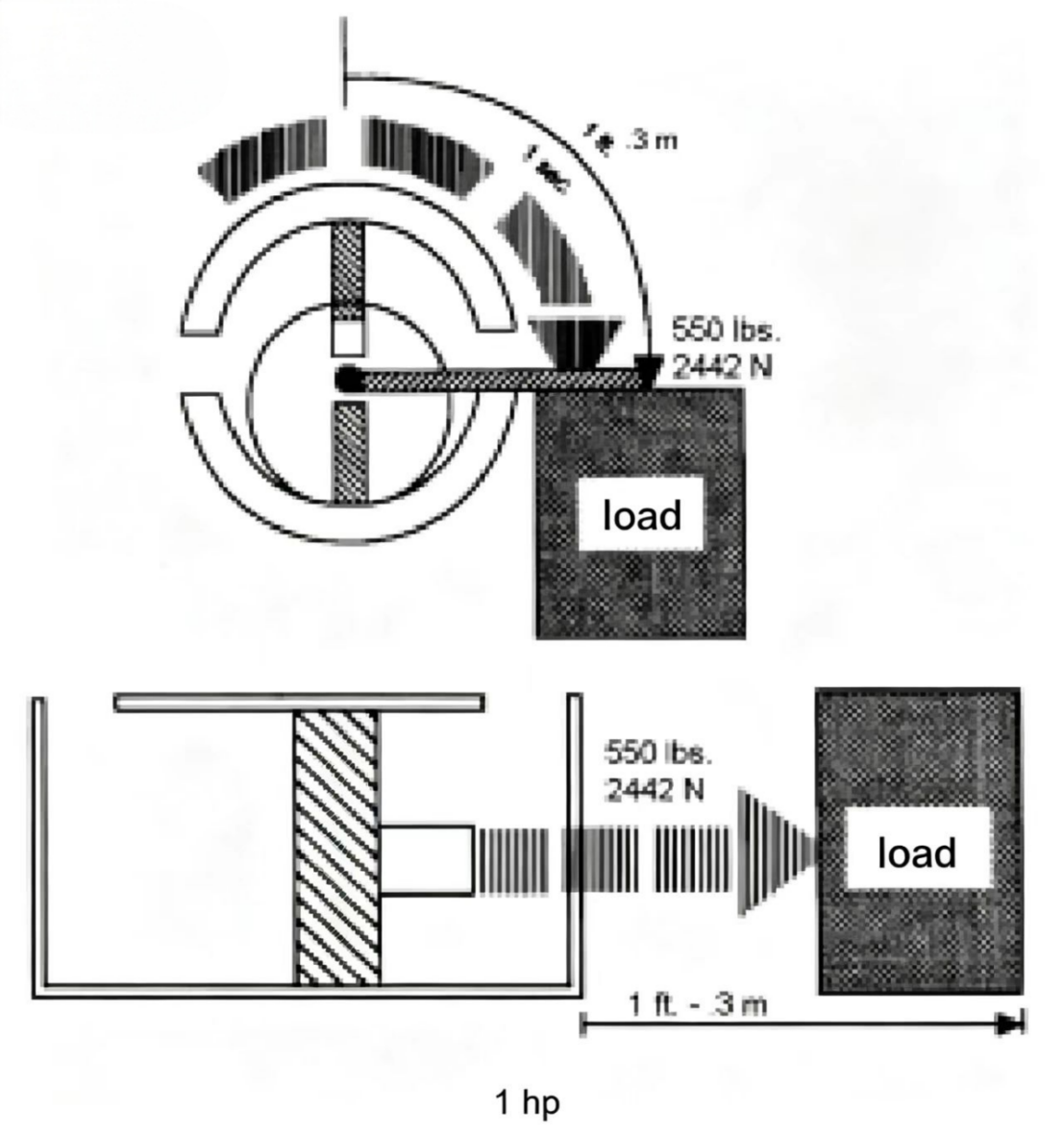
In früheren Kapiteln haben wir gelernt, dass Leistung die Arbeitsgeschwindigkeit ist, d. h. PS = ft·lb / Zeit oder W = J / Zeit.
Wir wissen außerdem, dass die Einheit der Leistung das Pferdestärke (PS) bzw. der Watt (W) ist. Wenn ein hydraulischer Zylinder oder ein hydraulischer Motor eine Last mit einer mechanischen Kraft von 550 lb (2.442 N) antreibt und sie innerhalb einer Sekunde um 1 ft (0,30 m) bewegt, wurde eine Leistung von 1 PS (746 W) verbraucht. Wird dieselbe Arbeit (550 ft·lb / 746 J) innerhalb einer halben Sekunde verrichtet, verdoppelt sich die Arbeitsgeschwindigkeit und die Leistung beträgt 2 PS (1.490 W).
Die mechanische Leistung, die ein Zylinder oder Motor an eine Last überträgt, entspricht der hydraulischen Leistung, die vom Zylinder oder Motor bereitgestellt werden muss. Für ein hydraulisches System, das Arbeit mit einer Rate von 550 ft·lb pro Sekunde (746 J) verrichtet, beträgt seine hydraulische Leistung 1 PS (746 W). Im mechanischen Leistungsformel werden jedoch „ft (m)“ und „lb (N)“ durch die hydraulischen Größen „psi (bar)“ und „gpm (L/min)“ ersetzt. Bei hydraulischen Leistungsberechnungen wird ein Umrechnungsfaktor verwendet, um den Zusammenhang zwischen gpm, psi, ft und lb (bzw. L/min, bar, m und N) auszudrücken.
Zur Berechnung der Leistung eines hydraulischen Zylinders oder des gesamten hydraulischen Systems:
pS = gpm × psi × 0,000583
W = PS × 746
W = (5∕3) × L/min × bar
Zur Berechnung der Abtriebsleistung eines hydraulischen Motors:
pS = Drehzahl × Drehmoment (in·lb) ∕ 63.025
kW = Drehzahl × Drehmoment (Nm) ∕ 9.543
Bisher haben wir Hydromotoren mit rotatorischer Abgabe und Hydraulikzylinder mit linearer Abgabe besprochen. Nun werden wir einen weiteren Aktortyp behandeln, der eine Drehung über einen begrenzten Winkel erzeugt. Dieser Typ wird als Schwenkzylinder oder Schwenkmotor bezeichnet. Seine Bauweise ist kompakt, einfach und effizient – er erzeugt ein hohes Drehmoment und benötigt nur wenig Einbauraum sowie eine einfache Montage.
Schwenkaktoren werden bei Werkzeugmaschinen für das Indexieren, beim Biegen, beim Heben oder Drehen schwerer Gegenstände, beim Kippen, bei der Positionierung, bei Spannvorrichtungen für die Bearbeitung, bei nautischen Steuerungen, beim Betätigen von Ventilen usw. eingesetzt.
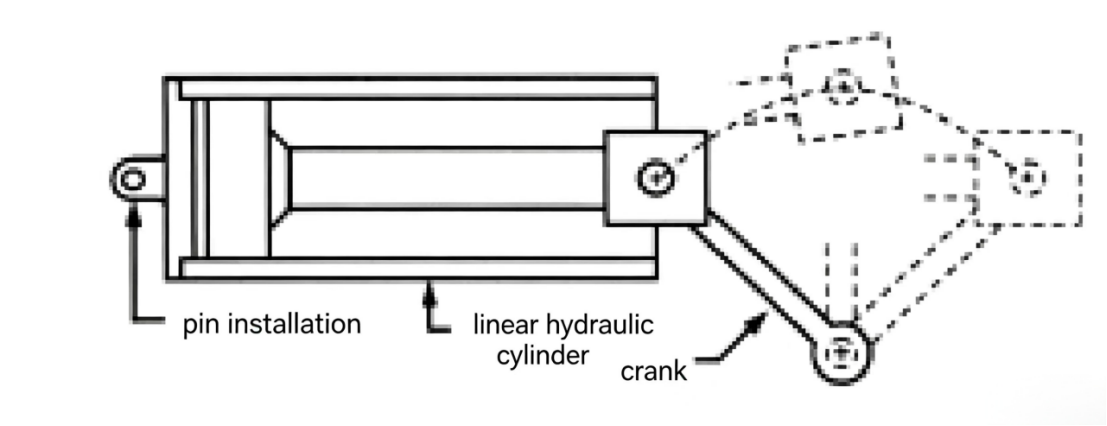
Es gibt zahlreiche Arten von Schwenkzylindern. Die einfachste Variante ist ein durch einen linearen Hydraulikzylinder angetriebener Schwenkmechanismus, bei dem das Zylinderrohrende mit einem Zapfen befestigt ist und die Kolbenstange mit einer Kurbel verbunden ist, die eine Welle zum Drehen antreibt. Dieser Schwenkzylinder kann über ein Vierwege-Wegeventil gesteuert werden, wobei an jedem Hubende Endschalter angebracht sind.
Wie alle mechanischen Geräte weist dieser lineare, zylinderbasierte Oszillationsaktuator einige grundlegende Eigenschaften auf, darunter die Möglichkeit, ihn aus Standardkomponenten, die ohne spezielle Bestellung erhältlich sind, zusammenzubauen – was den Konstrukteuren große Flexibilität bietet und die Kosten durch leicht beschaffbare Ersatzteile niedrig hält.
Dieser Typ von Oszillationsaktuator weist jedoch auch unerwünschte Merkmale auf: Die Kolbenstange ist ungeschützt und steht direkt mit der Umgebung in Kontakt, insbesondere da der Kurbelmechanismus üblicherweise nicht abgedichtet ist, was zu Sicherheitsrisiken führt. Zudem unterliegt die Antriebswelle typischerweise starken seitlichen Belastungen, was zu vorzeitigem Ausfall, übermäßigem Verschleiß und Verklemmung führt.
Bei diesem speziellen Typ von Oszillationsaktuator muss der Hydraulikzylinder frei schwingen können; daher müssen flexible Schlauchanschlüsse verwendet werden, und während des gesamten Hubes des Zylinders bleibt das Abtriebsdrehmoment nicht konstant.
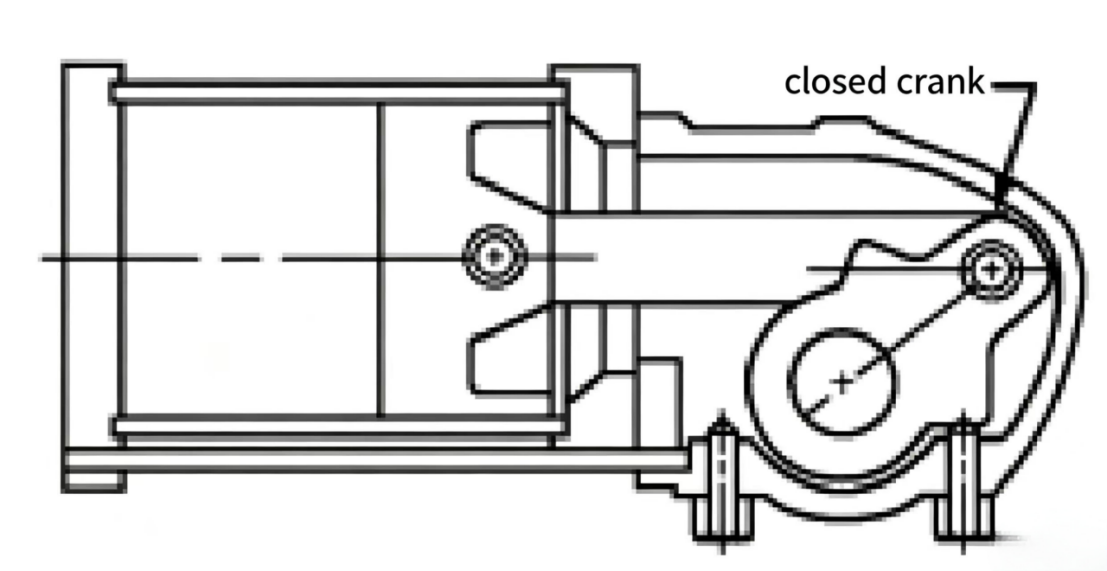
Der eingebaute oszillierende Zylinder ist dem oben beschriebenen linearen, zylinderbasierten Oszillationsmechanismus sehr ähnlich. Der eingebaute Zylinder verfügt über eine Schutzabdeckung, die Stößelstange und Kurbel umschließt. Die Antriebswelle weist in der Regel zusätzliche Lagerunterstützung auf, um starke seitliche Belastungen zu vermeiden. Dieser Typ kann mit Magnetventilen, Endschaltern oder Hub-Schaltern ausgestattet werden. Der Hubbereich ist normalerweise zwischen etwa 85° und 100° einstellbar.
Ein weiterer Typ ist der federrückstell-oszillierende Zylinder, bei dem ein hydraulischer Zylinder mit einer Rückstellfeder eingesetzt wird, um die Antriebswelle in ihre Ausgangsposition zurückzuführen. Federrückstell-oszillierende Zylinder können Drehmomente bis zu 5.000 in·lb (565 Nm) abgeben.

Der am häufigsten verwendete oszillierende Zylinder ist der Zahnstangen-und-Ritzel-Typ. Dieser Typ kann über die gesamte Drehung hinweg in beiden Richtungen ein konstantes Abtriebsdrehmoment aufrechterhalten. Bei dieser Konfiguration wirkt der hydraulische Druck auf den Kolben, der die mit dem Kolben verbundene Zahnstange antreibt; diese wiederum bewirkt durch Eingriff in das Ritzelgetriebe die Drehung der Welle. Standard-Zahnstangen-und-Ritzel-Zylinder weisen Drehwinkel von 90°, 180°, 360° oder sogar größer auf. Das Abtriebsdrehmoment von Zahnstangen-und-Ritzel-Zylindern kann bis zu 52.000.000 in·lb (5.876.000 Nm) betragen.

Es ist auch ein Schwenkmotor mit Lamellen erhältlich. Dieser Typ kann ein- oder mehrlamellig sein. Ein einlamelliger Motor kann sich um 280° drehen; ein zweilamelliger Motor um 200°. Das Abtriebsdrehmoment eines zweilamelligen Motors ist doppelt so hoch wie das eines einlamelligen Motors. Dieser Typ von Schwenkmotor kann Abtriebsdrehmomente bis zu 500.000 in·lb (Nm) erreichen.

Es gibt einen weiteren Typ von Oszillationsmotoren, der das Drehmoment mithilfe eines schraubenförmigen Keilwellen-Mechanismus erzeugt. Änderungen in der Länge und Steigung der Keilwelle ermöglichen eine breite Variation des Drehhubes. Dieser Typ von Oszillationsmotor verfügt über eine einzige schraubenförmige Keilwelle mit einer innen verzinnten Kolbenhülse auf der Welle – die Drehung der Kolbenhülse wird durch Führungsstangen begrenzt. Wenn sich die Kolbenhülse innerhalb des Zylinders bewegt, treibt sie die Keilwelle zur Drehung an. Übliche Drehhübe betragen 90°, 180°, 270° und 360°; die abgegebene Drehmomente können bis zu 1.000.000 in·lb (13.000 Nm) erreichen.
Ketten- und Kettenrad-Oszillationsmotoren nutzen Kolben, Ketten und Kettenräder, um die Welle anzutreiben. Dieser Stellzylinder verfügt typischerweise über einen großen Kolben (als Antriebsvorrichtung), der die Kette zieht, sowie über einen kleinen Kolben, der ein Austreten von Öl über den Rücklaufweg der Kette verhindert. Die abgegebenen Drehmomente können etwa 23.000 in·lb (2.599 Nm) erreichen, und die Drehung der Antriebswelle kann bis zu fünf volle Umdrehungen oder 1.800° betragen.
Bei der Auswahl des am besten geeigneten oszillierenden Zylinders für eine bestimmte Anwendung spielen unter anderem das erforderliche Drehmoment, die gewünschte Drehzahl und die Betriebsart eine Rolle. Die konkrete Auswahl eines oszillierenden Motors wird in einem anderen Kapitel beschrieben; dort wird zudem erläutert, wie zu entscheiden ist, ob ein einfach- oder doppeltwirkender Zylinder zum Einsatz kommen soll, ob eine geschlossene Positionierungsregelung erforderlich ist, ob Dämpfung notwendig ist usw. Auch die Schaltfrequenz bzw. die Zyklusdauer wird untersucht.
Die Geschwindigkeit eines Stellglieds hängt von der Durchflussmenge (gpm [L/min]) ab.
Die lineare Geschwindigkeit der Kolbenstange eines hydraulischen Zylinders hängt von der Geschwindigkeit ab, mit der die Pumpe Hydraulikflüssigkeit in die Kolbenkammer des Zylinders fördert (gpm [L/min]). Die Drehzahl der Abtriebswelle eines hydraulischen Motors hängt von der Durchflussmenge (gpm [L/min]) ab, die in den hydraulischen Motor eingespeist wird.
Die Ausgangskraft eines Stellglieds hängt vom Druck (psi [bar]) ab.
Die Ausgangskraft eines Zylinders wird in psi (bar) angegeben – die Ausgangskraft an der Antriebswelle eines Motors wird durch den Druck bestimmt, der auf die freiliegende Fläche der rotierenden Baugruppe des Motors wirkt. Die von einem Stellglied erzeugte Leistung ist das Produkt aus Stellgliedgeschwindigkeit und Ausgangskraft des Stellglieds.
Bei Zylindern wird die Ausgangskraft in psi und die Kolbenstangengeschwindigkeit in gpm angegeben. Die Konstante 0,000583 beschreibt den Zusammenhang zwischen psi, gpm und Leistung. Bei Motoren wird die Ausgangskraft als Drehmoment und die Motordrehzahl in U/min angegeben. Die Konstante 63.025 beschreibt den Zusammenhang zwischen U/min, Drehmoment und Leistung.

Willkommen bei HOVOO, einer chinesischen Dichtungsfabrik. Produktion von PU-, Gummis- und PTFE-Dichtungen. Die Dichtungen umfassen O-Ring, Kolben-Dichtung, Stange-Dichtung, Grau-Ring und Gas-Dichtung.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}