خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]
خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]

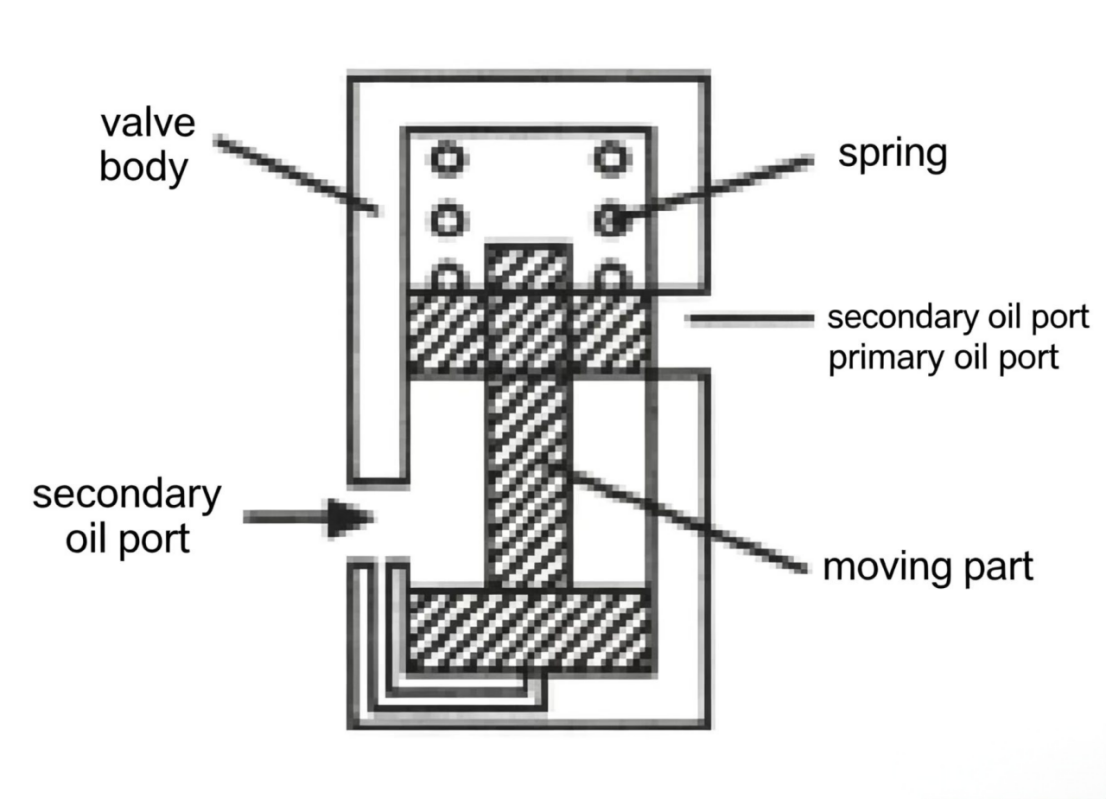
شیر کنترل هیدرولیک، یک قطعه مکانیکی است که از بدنهای تشکیل شده که دارای مسیرهای داخلی برای اتصال یا قطع جریان سیال و قطعات متحرک داخلی میباشد. مسیرهای موجود در پوسته برای انتقال روغن به کار میروند. عمل قطعات متحرک داخلی، فشار حداکثری، جهت جریان و نرخ جریان سیستم را کنترل میکند.
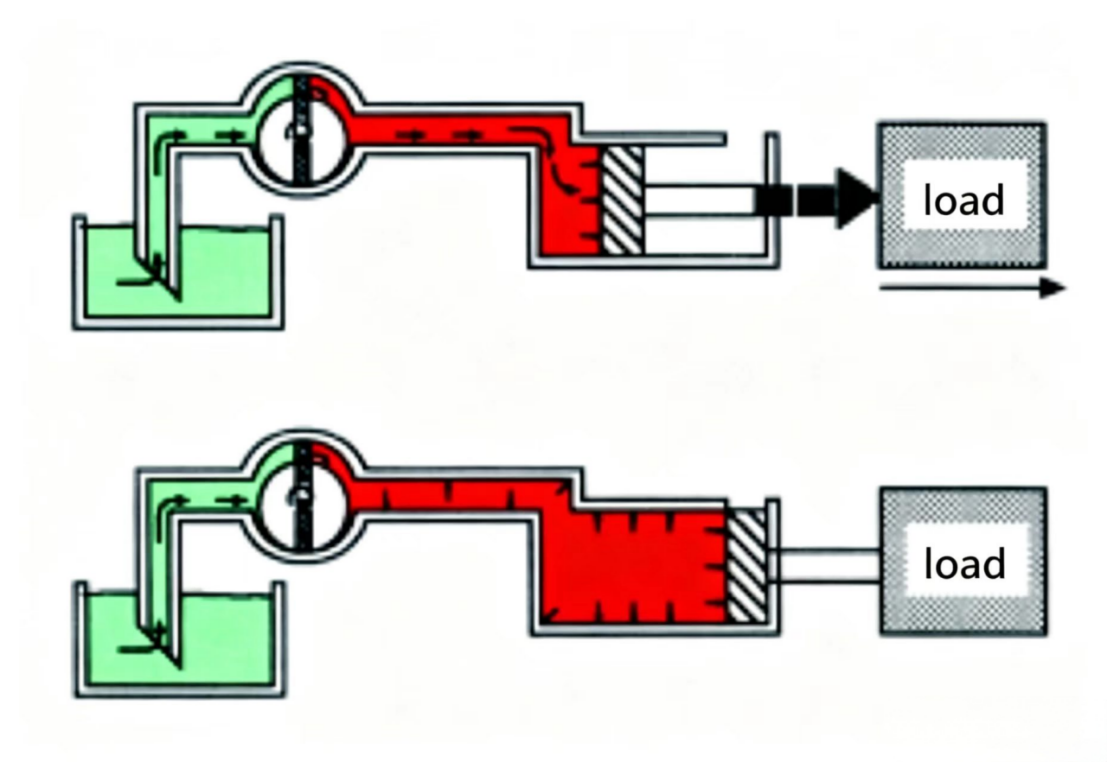
انرژی هیدرولیک میتواند به سیلندر هیدرولیک اعمال شود. وقتی نتیجه کار موفقیتآمیز باشد، پس از کاملشدن پیشروی سیلندر، کار انجام میشود. پمپ جابهجایی مثبت بهطور مداوم انرژی بیشتری را از محرک اصلی خود جذب میکند. این امر فشار روغن را افزایش میدهد. (نکته: حداقل مقاومت موجود در سیستم، فشار هیدرولیک اعمالشده را تعیین میکند.) هرچه سیلندر بیشتر پیشروی کند، استحکام فیزیکی سیستم به عنوان حداقل مقاومت عمل میکند.
پمپ فشار بیشتری اضافه میکند تا این مقاومت را غلبه کند. افراد از شیرهای کنترل فشار برای حفظ فشار سیستم در محدودهای ایمن استفاده میکنند.
قطعات متحرک داخلی شیر کنترل فشار بر اساس فشار عمل میکنند. وقتی فشار سیستم به مقدار تنظیمشدهی مشخصی برسد، قطعات متحرک داخلی یکی از مسیرها را در بدنهی شیر وصل یا مسدود میکنند، بهگونهای که جریان روغن به آن مسیر اجازه داده میشود یا جلوی جریان روغن به آن مسیر گرفته میشود.
شیر کنترل فشار از بدنهی شیر با مسیرهای اولیه و ثانویه و قطعات متحرک داخلی (شیرکش) تشکیل شده است. اتصالات خارجی به این مسیرها به ترتیب پورت اولیه و پورت ثانویه نامیده میشوند.
قطعهی متحرک داخلی شیر کنترل فشار معمولاً از نوع شیرکش است. وقتی شیرکش در یکی از موقعیتهای انتهایی قرار دارد، مسیر داخلی اتصال برقرار میکند و جریان از آن عبور میکند. اما هنگامی که در موقعیت انتهایی دیگر قرار میگیرد، مسیر داخلی مسدود شده و جریان از شیر قطع میشود.
در شیر کنترل فشار، شیرکش توسط فنر به یکی از موقعیتهای انتهایی تمایل دارد. در این موقعیت عادی بسته، مسیر داخلی مسدود بوده و مسیر جریان از شیر بسته است. این نوع شیر را «شیر کنترل فشار عادیبسته» مینامند.
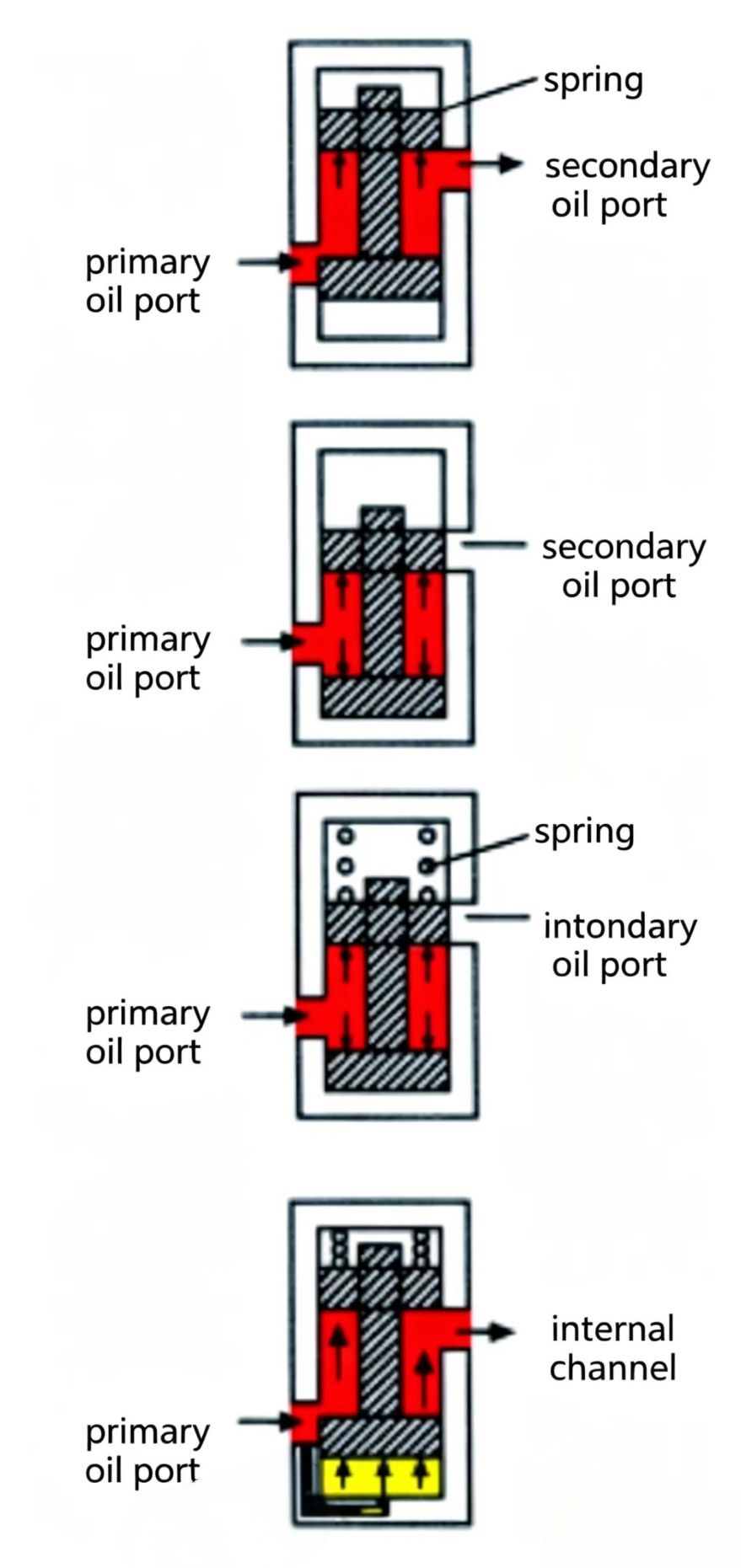
شیر کنترل فشار، فشار را در پایین غلتک (اسپول) حس میکند. این مسیر پایینی به پورت اصلی متصل است. هنگامی که فشار سیستم از نیروی فنر بیشتر شود، غلتک جابهجا میشود تا مسیر داخلی را متصل کند و جریان را از طریق شیر امکانپذیر سازد.
(فشار هیدرولیکی که برای کنترل حرکت غلتک استفاده میشود، فشار پایلوت نامیده میشود. استفاده از فشار پایلوت برای کنترل یک شیر، کنترل پایلوت نام دارد و رایجترین روش برای کنترل تمام انواع شیرهای هیدرولیکی است.)
اگر پورت اصلی این نوع شیر کنترل فشار به سمت فشار سیستم متصل شود و فشار اعمالشده توسط پمپ بیش از حد بالا باشد، جریان خروجی از پمپ میتواند از طریق این شیر به مخزن روغن هدایت شود — این نوع شیر کنترل فشار عادیبسته، شیر اطمینان نامیده میشود.
شکل ۷-۲: شیر کنترل فشار عادیبسته (عملکرد شیر اطمینان). فنر غلتک را در حالت بسته نگه میدارد تا زمانی که فشار سیستم از تنظیم فنر فراتر رود؛ سپس غلتک جابهجا شده و مسیری به سمت مخزن باز میکند.
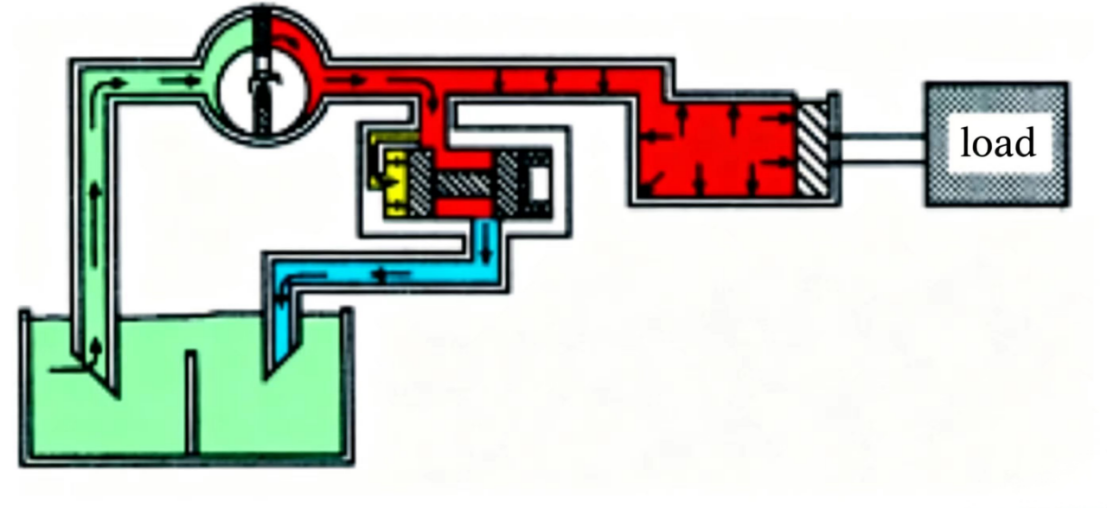
شکل ۷-۳: یک مدار هیدرولیکی ساده با کنترل فشار (شیر اطمینان). هنگامی که سیلندر به انتهای حرکت خود میرسد، شیر اطمینان باز میشود و جریان پمپ را به مخزن بازمیگرداند و بدین ترتیب حداکثر فشار سیستم را محدود میکند.
پس از کاملشدن پیشروی یک سیلندر هیدرولیکی، باید دوباره به عقب کشیده شود تا بتوان دوباره کار انجام داد. به همین دلیل، سیلندرهایی که نیاز به حرکت در دو جهت دارند، معمولاً از سیلندرهای هیدرولیکی دوطرفه (دو عملگر) استفاده میکنند. در این حالت، جهت جریان سیال نیز باید همزمان معکوس شود.
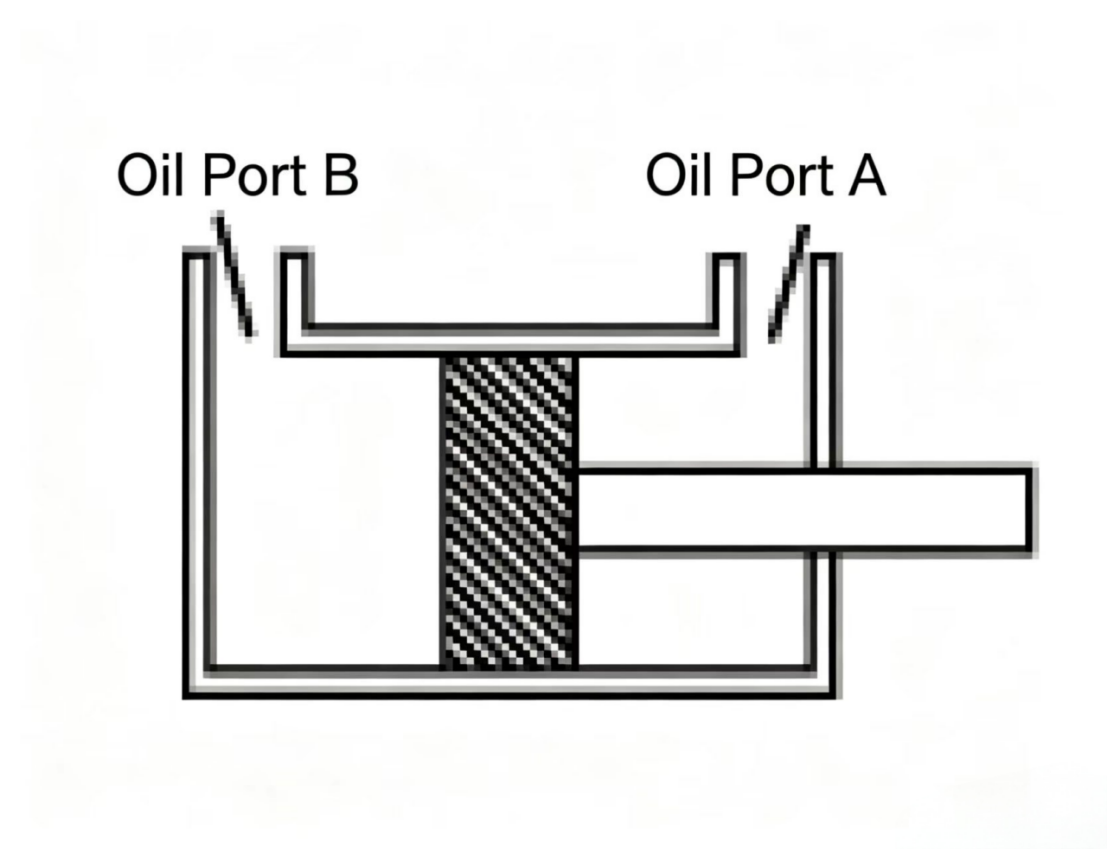
یک سیلندر هیدرولیکی دوطرفه دارای یک دریچه در هر انتهای بدنه است که امکان ورود و خروج روغن را فراهم میکند، بنابراین پیستون میتواند در هر دو جهت حرکت کند (دوطرفه). برای تمایز بین دو دریچهٔ سیلندر دوطرفه، یکی را «A» و دیگری را «B» نامگذاری میکنیم.
قطعات متحرک داخلی شیر کنترل جهتی وظیفهٔ اتصال یا قطع مسیرهای داخلی بدنهٔ شیر را دارند و بدین ترتیب جهت جریان روغن را کنترل میکنند.
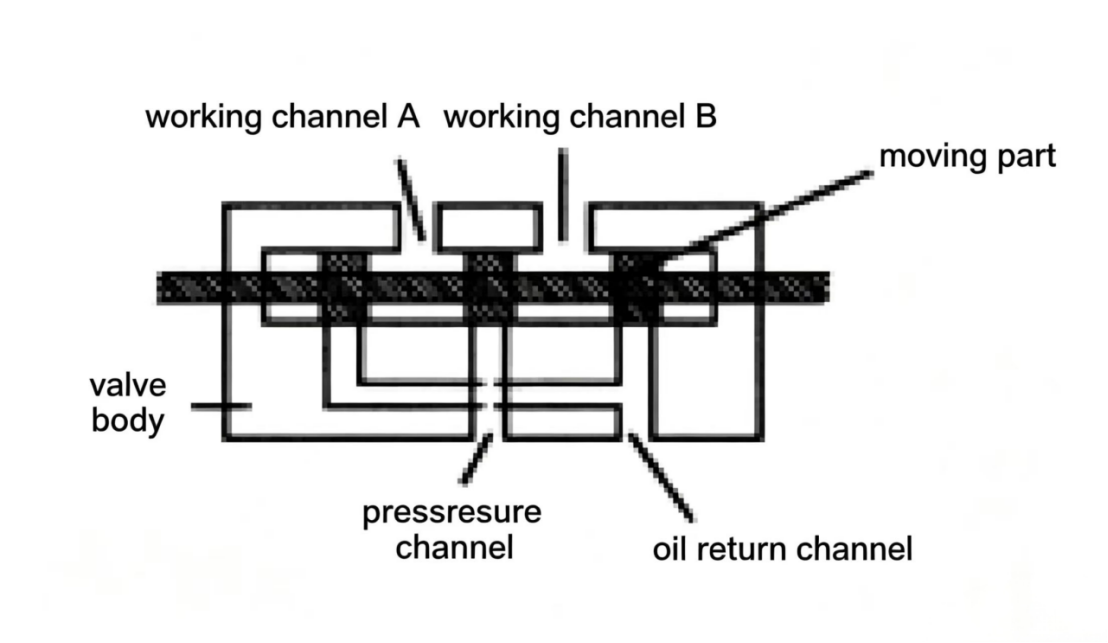
شیر کنترل جهتدار معمولی دارای چهار مسیر داخلی در بدنهٔ شیر و یک سوپاپ لغزان است که میتواند این مسیرها را به هم متصل یا قطع کند.
هنگامی که سوپاپ در یکی از موقعیتهای انتهایی قرار دارد، مسیر فشار به مسیر کار A متصل میشود و مسیر بازگشت به مسیر کار B متصل میشود. هنگامی که سوپاپ به موقعیت انتهایی دیگر منتقل میشود، مسیر فشار به مسیر کار A متصل میشود و مسیر بازگشت به مسیر کار B متصل میشود. تغییر جهت سوپاپ، جهت جریان روغن ورودی به سیلندر هیدرولیکی را معکوس میکند.
هنگامی که میلهٔ سیلندر بهطور کامل به اندازهٔ مورد نیاز از سیلندر بیرون میآید و یا به داخل آن بازمیگردد، کار انجام میشود. هنگامی که سوپاپ به موقعیت انتهایی دیگری منتقل میشود، روغن به سمت دیگر سیلندر جریان مییابد و میلهٔ سیلندر بازمیگردد.
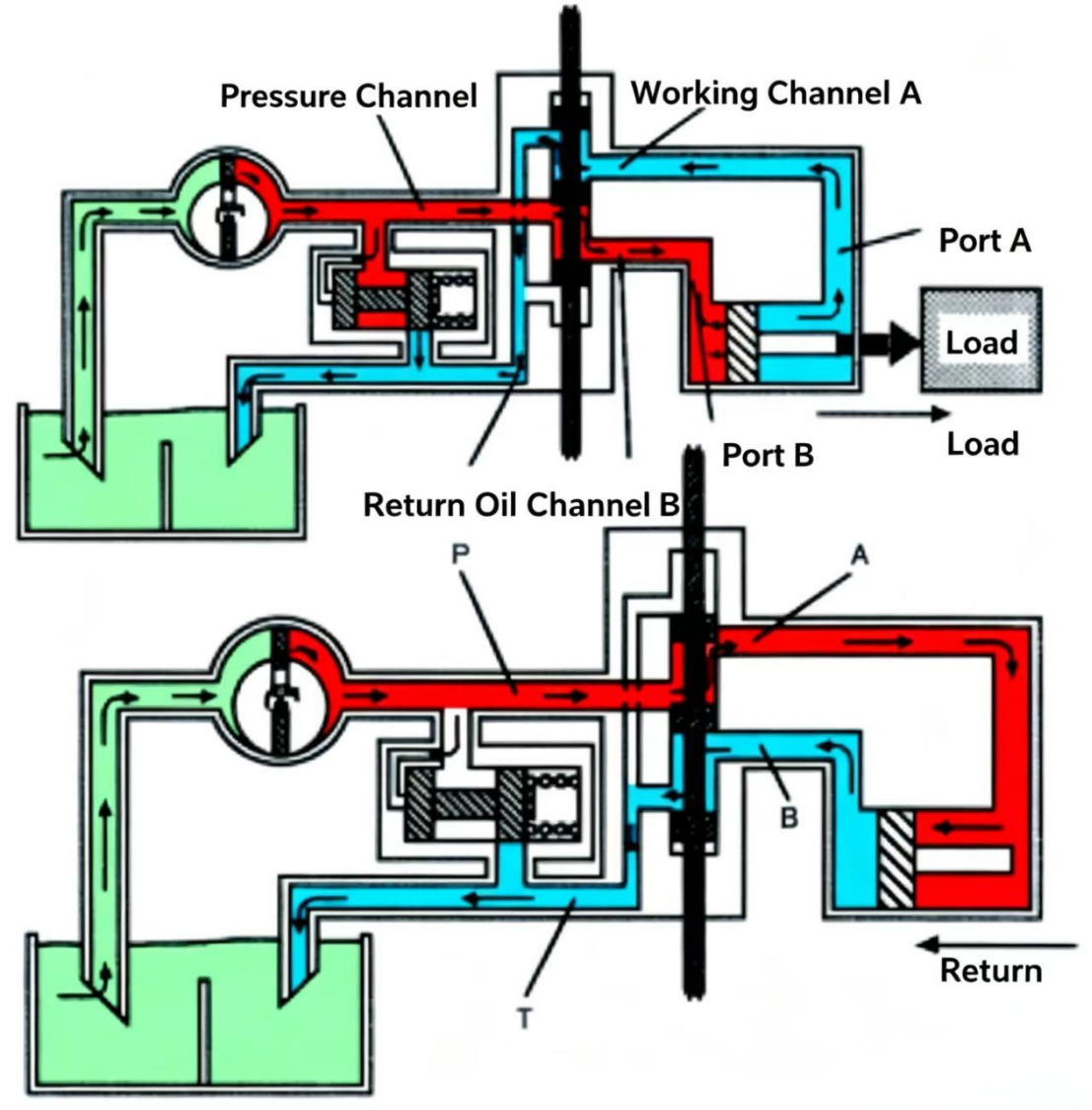
شکل ۷-۴: شیر کنترل جهتدار در مدار سیلندر دوطرفه. جابجایی سوپاپ، جهت جریان روغن را معکوس میکند و در نتیجه جهت حرکت سیلندر را نیز معکوس میسازد.
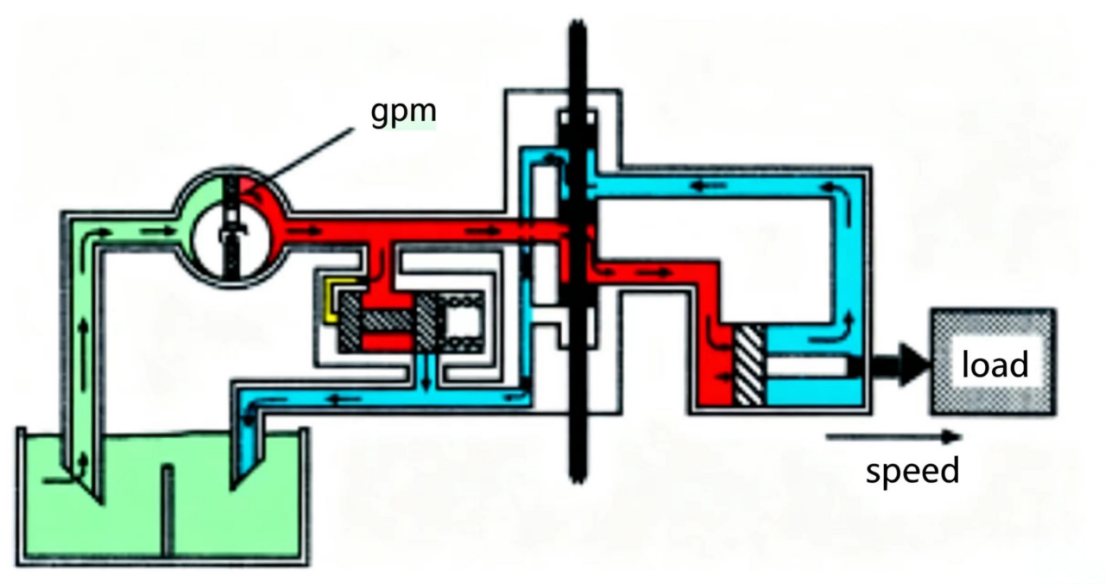
در بسیاری از کاربردها، سرعت عملکرد فعالکننده باید کنترل شود و گاهی اوقات با دقت بسیار بالایی کنترل گردد. همانطور که پیشتر توضیح داده شد، سرعت فعالکنندهها (سیلندرها و موتورهای هیدرولیک) بهطور مستقیم با نرخ تزریق روغن مرتبط است — یعنی سرعت فعالکننده توسط دبی جریان ورودی تعیین میشود.
از آنجا که جابجایی پمپ میتواند ثابت باشد، امکان انتخاب دبی جریان پمپ بر اساس سرعت مورد نیاز فعالکننده وجود دارد. این روش تنها در سیستمهایی که دارای یک فعالکننده هستند، قابل اجرا است.
معمولاً در یک سیستم هیدرولیک، تعداد فعالکنندهها بیش از یکی است. اگر سیستم نیاز داشته باشد که هر سیلندر هیدرولیک بهصورت مستقل کار کند، دبی جریان پمپ باید بر اساس بزرگترین سیلندر هیدرولیک که نیازمند سریعترین سرعت است، انتخاب گردد. این بدان معناست که فعالکنندههای کوچکتر با سرعت بیشتری حرکت خواهند کرد که ممکن است مطلوب نباشد. برای کاهش دبی جریان ورودی به این فعالکنندهها یا هر فعالکننده دیگری، باید از شیر کنترل دبی استفاده شود.
هنگام استفاده از شیر کنترل دبی، همیشه امکان کاهش دبی جریان از پمپ به فعالکننده وجود دارد.
شیر کنترل جریان معمولی از یک بدنهٔ شیر و یک قطعهٔ متحرک تشکیل شده است. در مثال ما، قطعهٔ متحرک سوزن تنظیمکننده با انتهای مخروطی است. از آنجا که این سوزن در حین کار واقعاً حرکت نمیکند (بلکه پیشاز کار به موقعیتی تنظیم شده است)، مناسبتر است که قطعات متحرک شیر کنترل جریان را «قابل تنظیم» بنامیم تا «متحرک».
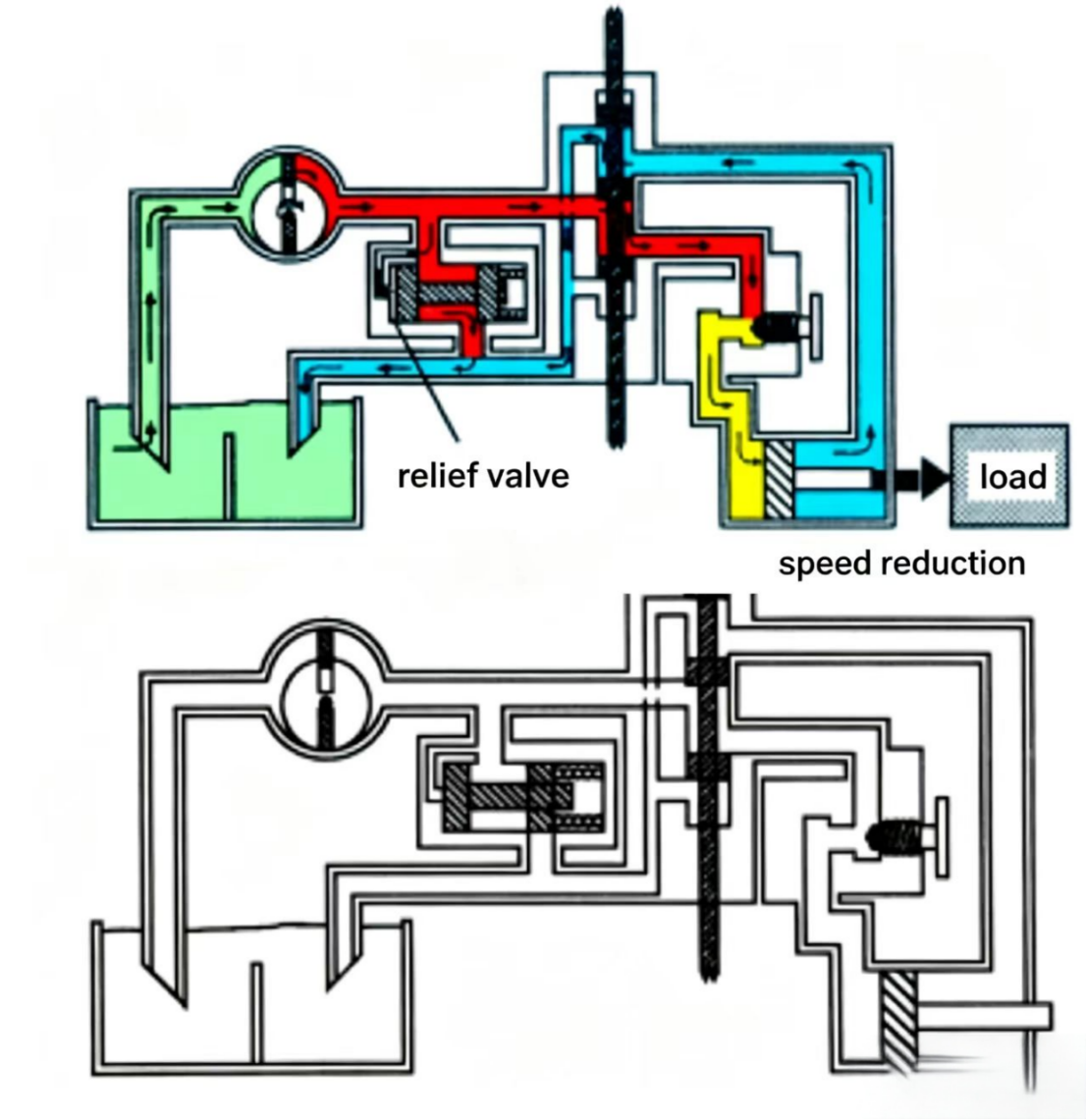
در یک سیستم هیدرولیکی، شیر کنترل جریان همواره با شیر کنترل فشار (شیر اطمینان) همکاری میکند. شیر کنترل جریان یک مقاومت است که باعث میشود پمپ هیدرولیک فشار بالاتری تولید کند. این فشار ممکن است بخشی از جریان خروجی از پمپ را وادار کند تا شیر اطمینان را باز کند؛ در نتیجه جریان عبوری از شیر کنترل جریان کاهش یافته و جریان وارد کننده به عملگر (اکچوئیتور) به مقدار مطلوب برسد.
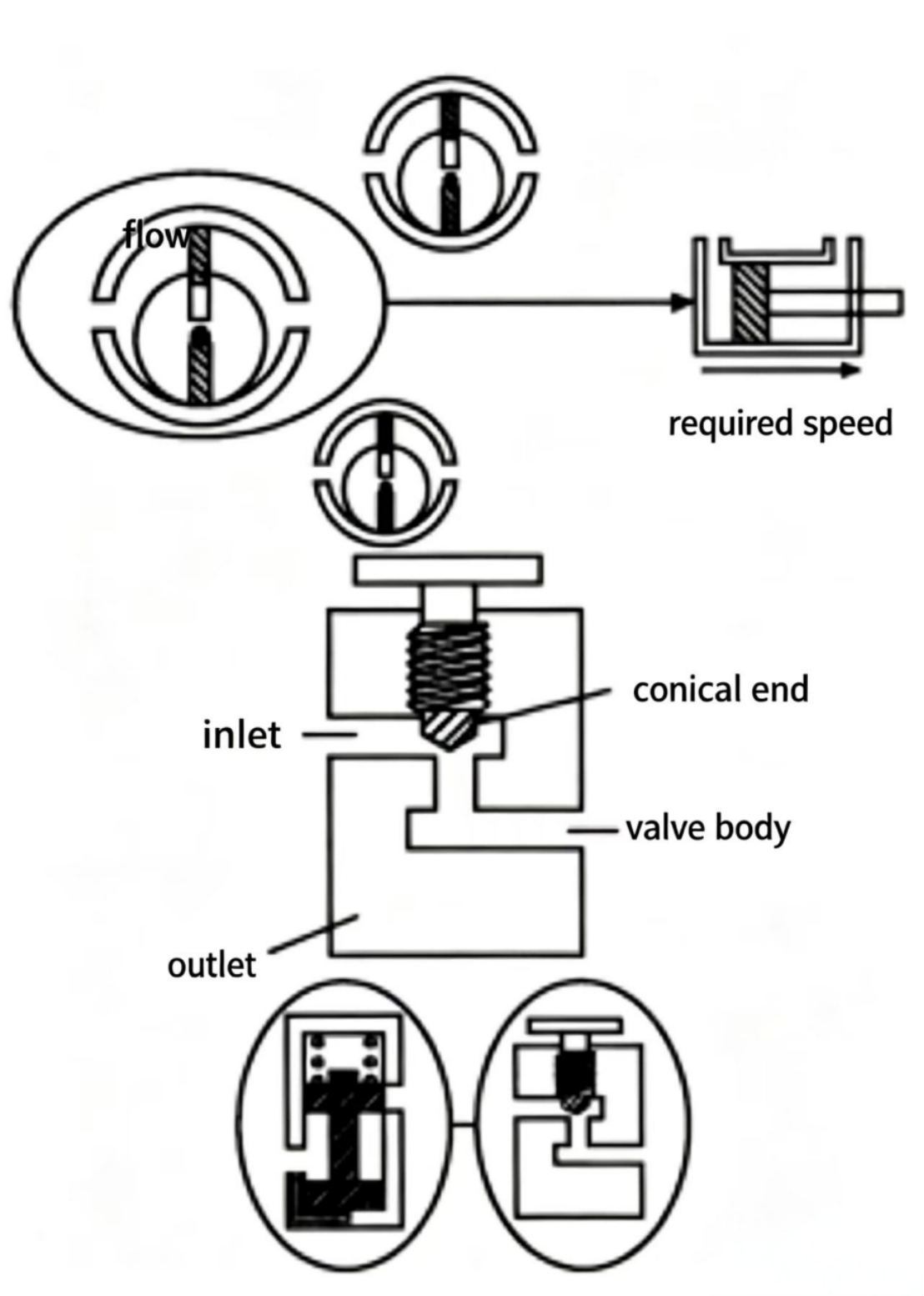
شکل ۷-۵: مدار کنترل جریان. شیر سوزنی جریان ورودی به سیلندر را محدود میکند. جریان اضافی پمپ از طریق شیر اطمینان به مخزن هدایت میشود. میزان باز شدن شیر سوزنی سرعت سیلندر را تعیین میکند.
تمام اجزای معرفیشده در بالا میتوانند یک سیستم هیدرولیکی ساده را تشکیل دهند. از آنجا که انرژی هیدرولیکی در این سیستم قابل کنترل است، این سیستم میتواند کار مفیدی انجام دهد.
سیستمهای هیدرولیکی در بسیاری از زمینهها — از فضایی، هواپیماها و تجهیزات نظامی تا صنعتی، ماشینآلات حرکتی و تجهیزات فولادی — بهطور گستردهای استفاده میشوند. اصول کار سیستمهای هیدرولیکی در تمام این کاربردها مشابه اصلی است که در بالا توضیح داده شد. تنها تفاوت بین انواع مختلف سیستمهای هیدرولیکی در اجزای بهکاررفته قرار دارد.
در فصلهای بعدی، بهطور دقیق به بررسی انواع مختلف اجزای سیستمهای هیدرولیکی صنعتی خواهیم پرداخت. برای توضیح نحوه استفاده از این اجزا، همچنین برخی از مدارهای هیدرولیکی پایه را طراحی خواهیم کرد.
در بحثهای پیشین دربارهٔ اجزای هیدرولیکی و سیستمهای پایه، تمام مطالب بهصورت گرافیکی توضیح داده شدند — یعنی با استفاده از نمای مقطعی برای نمایش بصری عملکرد داخلی اجزا. این روش برای توضیح مشکلات مفید است، اما از دیدگاه کاربردی و روزمره غیرعملی میباشد.
مانند سایر زمینههای فنی، در حوزهٔ هیدرولیک نیز از نمادهای گرافیکی برای نمایش اجزا و سیستمها استفاده میشود. اجزای هیدرولیکی مختلف و سیستمهای سادهای که قبلاً مورد بحث قرار گرفتند، همگی میتوانند با استفاده از نمادهای گرافیکی هیدرولیکی و پنوماتیکی استاندارد ANSI Y32.10 یا ISO 1219 نمایش داده شوند.
علاوه بر اجزایی که قبلاً مورد بحث قرار گرفتند، اجزای تشکیلدهندهٔ یک سیستم هیدرولیکی شامل موتورهای الکتریکی، فیلترهای هیدرولیکی و غیره نیز میشوند. معمولاً سیستمهای هیدرولیکی توسط موتورهای الکتریکی به حرکت درمیآیند. همچنین، برای حفظ سطح مناسبی از تمیزی، باید از فیلترهای هیدرولیکی در سیستمها استفاده کرد تا روغن در برابر آلودگی محافظت شود.
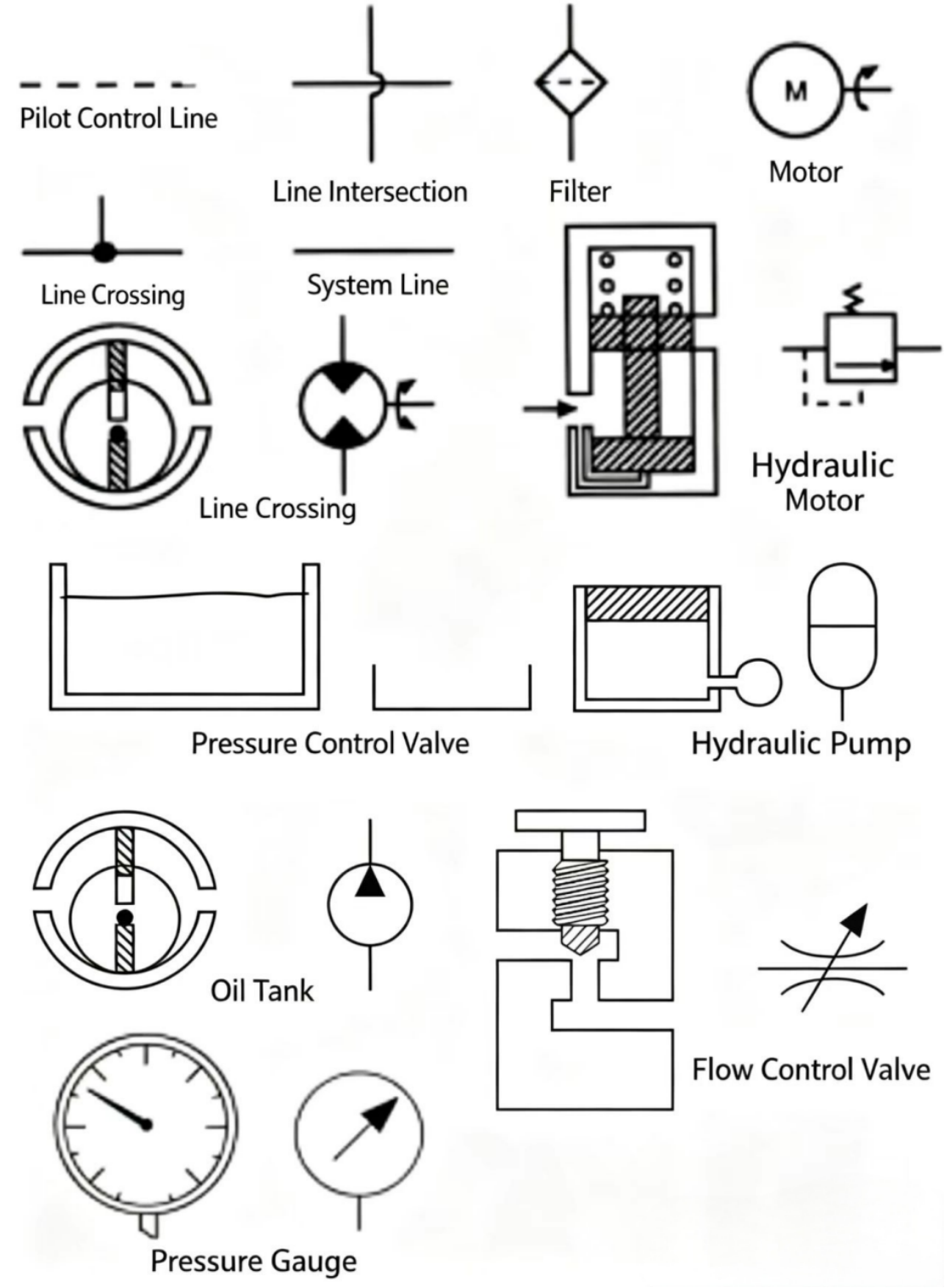
شکل ۷-۷ نمادهای گرافیکی استاندارد هیدرولیکی (ANSI Y32.10/ISO 1219). این نمادها در تمامی نمودارهای اصلی مدار هیدرولیکی بهجای طرحهای مقطعی بهکار میروند.
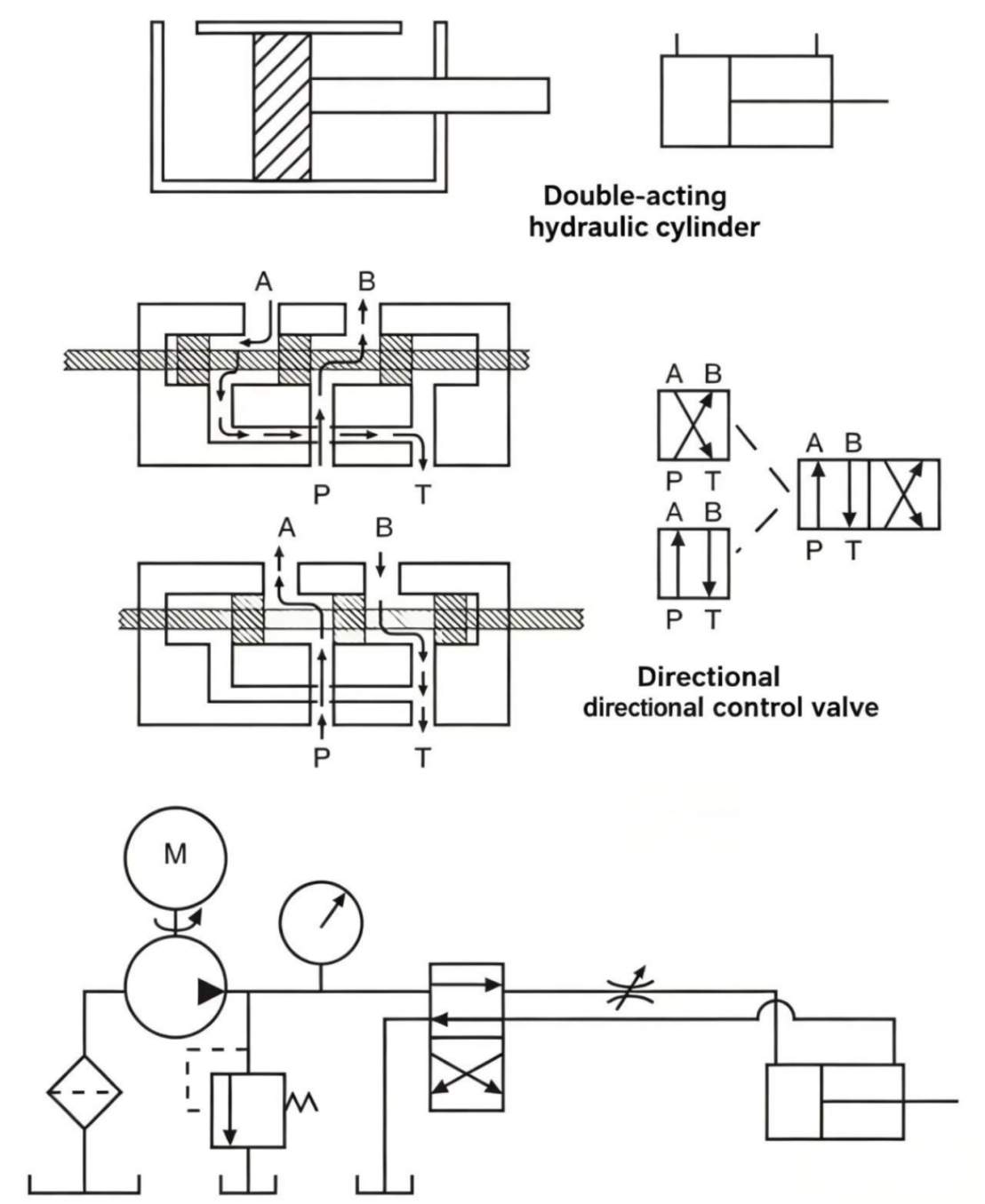
شکل ۷-۸ یک مدار هیدرولیکی ساده و کامل که با استفاده از نمادهای گرافیکی استاندارد نمایش داده شده است. این روش، روشی است که در عمل مهندسی برای ترسیم مدارهای هیدرولیکی بهکار میرود.

خوش آمدید به هاوو، یک کارخانه چینی تولیدچی دخت. تولید دختهای PU، رubber و PTFE. این دختها شامل دخت O-ring، دخت پیستون، دخت گیردار، دخت گری رینگ و دخت گاز میشود.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}