خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]
خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]

تُحوّل الأسطوانة الهيدروليكية الطاقة الهيدروليكية إلى حركة ميكانيكية خطية أو مستقيمة. وعند توصيلها بحمولة قابلة للحركة، تقوم بأداء العمل.
وكما ورد في الفصول السابقة، تتكون الأسطوانة الهيدروليكية أساسًا من جسم أسطواني (برميل)، وغطاءين مغلقين في الطرفين، وبستون، وقضيب بستون، ومنفذَي دخول وخروج. ويوجد منفذ واحد في كل طرف — أحدهما لدخول الزيت، والآخر لخروج الزيت.
الشكل ۶-۱: أسطوانة هيدروليكية قياسية ذات تأثير مزدوج. يدخل الزيت من المنفذ الأيسر ما يؤدي إلى إطالة قضيب التوصيل؛ بينما يؤدي دخول الزيت عبر المنفذ الأيمن إلى سحبه.
در طول حرکت پیستون در سیلندر، انرژی هیدرولیک بر پیستون متحرک اثر میگذارد. فشار تولیدشده توسط این انرژی هیدرولیک از مقاومت ایجادشده توسط بار بیشتر نخواهد بود. برای یک سیلندر با ابعاد مشخص، باید بدانیم که چه فشار کاریای نیروی خروجی مشخصی تولید میکند. این مقدار را میتوان (با صرفنظر از اصطکاک) با استفاده از فرمول زیر تعیین کرد:
فشار = نیرو ÷ مساحت
هنگام استفاده از این فرمول، یا مساحت و فشار داده شدهاند تا نیروی خروجی محاسبه شود، یا مساحت و نیروی خروجی معلوم هستند تا فشار تعیین گردد. در عمل، معمولاً قطر داخلی سیلندر (بوُر) را میشناسیم و باید مساحت سطح پیستون را محاسبه کنیم — اما محاسبه مساحت دایره به سادگی محاسبه مساحت مربع انجام میشود.
مساحت دایره تقریباً برابر با ۷۸٫۵۴٪ مساحت مربعی است که ضلع آن برابر با قطر دایره باشد. دقیقتر اینگونه است:
مساحت دایره = قطر^۲ × ۰٫۷۸۵۴
فرمول دیگری که معمولاً استفاده میشود:
مساحت دایره = π × D^۲ ÷ ۴

شکل ۶-۲: مساحت دایره = D² × ۰٫۷۸۵۴. این فرمول ساده بهطور مداوم در محاسبات سیلندرهای هیدرولیکی استفاده میشود.
فاصلهای که انرژی هیدرولیکی بر آن اثر میگذارد، میزان کار انجامشده را تعیین میکند — این فاصله، طول حرکت سیلندر (استروک) نام دارد. همانطور که قبلاً اشاره شد، بهنظر میرسد که تقویت نیرو با فشار هیدرولیک هیچ هزینهای ندارد. در برخی موارد خاص — زمانی که سیستم در حالت ساکن است — یک نیروی کوچک میتواند نیروی بسیار بزرگی تولید کند بدون اینکه ظاهراً چیزی از دست برود. اما اگر این نیروی تقویتشده باعث جابهجایی نیز شود، چیزی قربانی میشود: فاصله.
هر سیلندر هیدرولیکی دارای حجمی (جابجایی) برابر با طول حرکت آن (اینچ) ضربدر مساحت پیستون آن (اینچ مربع) است که حاصلضرب آن حجمی بر حسب اینچ مکعب (سانتیمتر مکعب) را میدهد.
حجم سیلندر = مساحت پیستون × طول حرکت
(اینچ³) = (اینچ²) × (اینچ) یا (سانتیمتر³) = (سانتیمتر²) × (سانتیمتر)
مثال: پیستون بالایی باید ۲ اینچ (۵٫۰۸ سانتیمتر) حرکت کند تا پیستون سیلندر پایینی ۱ اینچ (۲٫۵۴ سانتیمتر) جابهجا شود. هر دو پیستون کار یکسانی انجام میدهند. پیستون بالایی ۲۰ اینچ مکعب (۳۲۷٫۸ سانتیمتر مکعب) مایع را جابهجا میکند — و پیستون سیلندر پایینی نیز توسط همین حجم ۲۰ اینچ مکعب (۳۲۷٫۸ سانتیمتر مکعب) مایع جابهجا میشود.
سرعت میلهٔ پیستون سیلندر هیدرولیکی به سرعت پر شدن محفظهٔ پشت پیستون با مایع بستگی دارد. فرمولهای محاسبهٔ سرعت میلهٔ پیستون:
سرعت میلهٔ پیستون (اینچ بر دقیقه) = دبی جریان (گالن در دقیقه) × ۲۳۱ ÷ مساحت سطح پیستون (اینچ مربع)
سرعت میلهٔ پیستون (متر بر ثانیه) = دبی جریان (لیتر در دقیقه) × ۰٫۱۶۶۷ ÷ مساحت سطح پیستون (سانتیمتر مربع)

موتور هیدرولیکی یک عملگر است که انرژی هیدرولیکی را به انرژی مکانیکی چرخشی تبدیل میکند. این انرژی چرخشی از طریق شفت محرک به بار اعمال میشود.
تمام موتورهای هیدرولیکی اساساً از یک پوسته با دریچههای ورودی و خروجی و یک مجموعهٔ چرخان متصل به شفت محرک تشکیل شدهاند.
نمونهای که در اینجا نشان داده شده است، یک موتور هیدرولیکی پرهای است. مجموعهٔ چرخان از یک روتور و پرههایی تشکیل شده است که میتوانند بهصورت آزاد در شیارهای روتور جابهجا شوند. این مجموعهٔ چرخان بهصورت غیرمتمرکز درون پوسته نصب شده است؛ و محور محرک به بار متصل میشود. هنگامی که روغن فشاری وارد اتاقک ورودی میشود، انرژی هیدرولیکی بر سطح پرههای نمایانشده در اتاقک ورودی اثر میگذارد. ازآنجاکه مساحت سطح بالایی پرهها که در معرض روغن فشاری قرار دارد بزرگتر است، نیروی واردبر روتور نامتعادل میشود — و روتور چرخانده میشود.
هنگامی که روغن به اتاقک خروجی میرسد و حجم آن کاهش مییابد، خارج میشود.
توجه: پیش از اینکه این نوع موتور بتواند بهدرستی کار کند، پرهها باید کشیده شده و در تماس محکمی با پوسته قرار گیرند. برخلاف یک پمپ هیدرولیکی، پرهها توسط نیروی گریز از مرکز بهبیرون هل داده نمیشوند — روش کشیدن پرههای موتور در فصل بعدی توضیح داده خواهد شد.
شکل ۶-۶: عملکرد موتور پرهای. روغن فشاری بر سطوح پرهها وارد میشود. از آنجا که مساحت پره بالایی در معرض فشار بزرگتر از مساحت پره پایینی است، نیروی حاصل از این اختلاف، روتور را به چرخش درمیآورد.
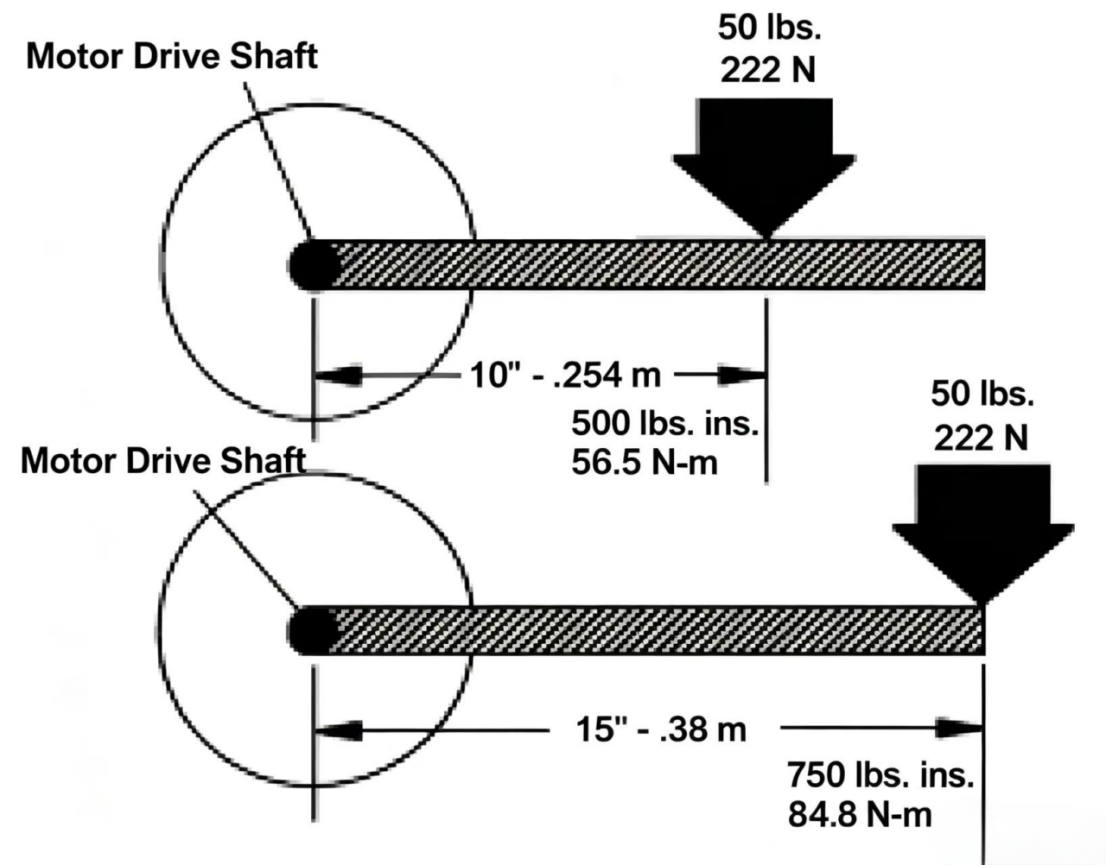
گشتاور نیروی چرخشی یا پیچشی است. گشتاور نیرویی است که در فاصلهای از خط مرکزی شفت وارد میشود. واحد گشتاور پوند-اینچ (lb.in.) یا نیوتن-متر (Nm) است.
گشتاور به ما موقعیت نیرو را نسبت به خط مرکزی شفت موتور هیدرولیکی نشان میدهد. فرمول گشتاور به این صورت است:
گشتاور = نیرو × فاصله از خط مرکزی شفت
(پوند-اینچ) = (پوند) × (اینچ) یا (نم) = (نیوتن) × (متر)
مثالی از شکل: نیرویی به اندازهٔ ۵۰ پوند (۲۲۲ نیوتن) بر روی یک میلهٔ محرک متصل به محور موتور وارد میشود. فاصلهٔ بین مرکز محور و نقطهٔ اعمال نیرو ۱۰ اینچ (۰٫۲۵۴ متر) است. گشتاور حاصلشده روی محور برابر با ۵۰۰ اینچ-پوند (۵۶٫۵ نیوتن-متر) است. اگر همین نیروی ۵۰ پوند (۲۲۲ نیوتن) بر روی یک میلهٔ محرک به طول ۱۵ اینچ (۰٫۳۸ متر) وارد شود، گشتاور روی محور برابر با ۷۵۰ اینچ-پوند (۸۴٫۶ نیوتن-متر) خواهد بود. هرچه فاصلهٔ نقطهٔ اعمال نیرو از مرکز محور بیشتر باشد، گشتاور ایجادشده نیز بیشتر میشود. توجه داشته باشید که گشتاور شامل هیچ جابهجایی یا حرکتی نمیشود.
باری که به محور محرک موتور متصل میشود، گشتاوری را مانند توضیح دادهشده در بالا ایجاد میکند. در مورد موتور هیدرولیکی، این بار بهصورت مقاومت ظاهر میشود — که باید توسط فشار هیدرولیک واردشده بر مجموعهٔ چرخان موتور غلبه شود.
گشتاور (اینچ-پوند) = psi × جابهجایی موتور (اینچ³) ÷ (۲ × π)
گشتاور (نیوتن-متر) = بار × جابهجایی موتور (سانتیمتر³) ÷ (۲۰ × π)
سرعت محور موتور هیدرولیکی توسط سرعت تزریق سیال تعیین میشود. فرمول آن بهشرح زیر است:
سرعت موتور (دور بر دقیقه) = دبی جریان (گالن در دقیقه) × ۲۳۱ ÷ جابهجایی موتور (اینچ³/دور)
سرعت موتور (دور در دقیقه) = دبی جریان (لیتر در دقیقه) × ۱۰۰۰ ÷ حجم جابجایی موتور (میلیلیتر در دور)
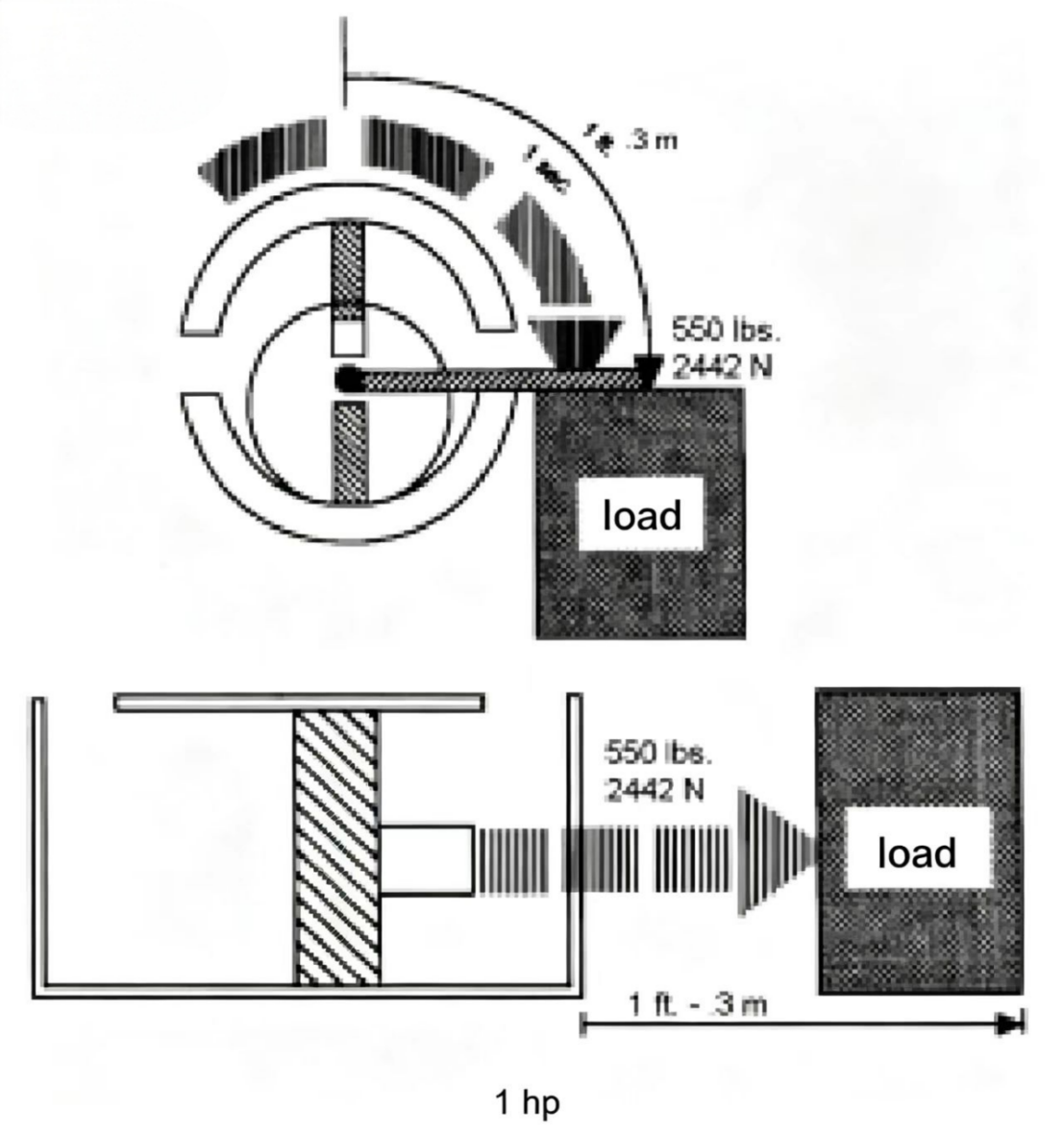
در فصلهای پیشین آموختیم که توان نرخ انجام کار است، یعنی اسب بخار = فوت-پوند بر زمان، یا وات = ژول بر زمان.
همچنین میدانیم که اسب بخار (hp) یا وات (W) واحد توان هستند. اگر سیلندر هیدرولیکی یا موتور هیدرولیکی باری را با نیروی مکانیکی ۵۵۰ پوند (۲۴۴۲ نیوتن) به حرکت درآورد و آن را در مدت ۱ فوت (۰٫۳۰ متر) در ۱ ثانیه جابجا کند، از ۱ اسب بخار (۷۴۶ وات) توان استفاده کرده است. اگر همین کار (۵۵۰ فوت-پوند یا ۷۴۶ ژول) در نیم ثانیه انجام شود، سرعت انجام کار دو برابر میشود و توان مصرفی برابر با ۲ اسب بخار (۱۴۹۰ وات) خواهد بود.
توان مکانیکی که توسط یک سیلندر یا موتور به بار منتقل میشود، برابر با توان هیدرولیکی مورد نیاز سیلندر یا موتور است. برای یک سیستم هیدرولیکی که کاری با نرخ ۵۵۰ فوت-پوند در ثانیه (۷۴۶ ژول) انجام میدهد، توان هیدرولیکی آن ۱ اسب بخار (۷۴۶ وات) است. با این حال، در فرمول توان مکانیکی، «فوت (متر)» و «پوند (نیوتن)» جای خود را به اصطلاحات هیدرولیکی «psi (بار)» و «gpm (لیتر در دقیقه)» میدهند. در محاسبات توان هیدرولیکی از یک ضریب تبدیل برای بیان رابطه بین gpm، psi، فوت و پوند (یا لیتر در دقیقه، بار، متر و نیوتن) استفاده میشود.
برای محاسبه توان یک سیلندر هیدرولیکی یا کل سیستم هیدرولیکی:
اسب بخار = gpm × psi × ۰٫۰۰۰۵۸۳
وات = اسب بخار × ۷۴۶
وات = (۵/۳) × لیتر در دقیقه × بار
برای محاسبه توان خروجی موتور هیدرولیکی:
اسب بخار = دور در دقیقه × گشتاور (پوند-اینچ) ÷ ۶۳٬۰۲۵
کیلووات = دور در دقیقه × گشتاور (نیوتن-متر) ÷ ۹٬۵۴۳
تاکنون در مورد موتورهای هیدرولیک با خروجی چرخشی و سیلندرهای هیدرولیک با خروجی خطی بحث کردهایم. اکنون به بررسی نوع دیگری از عملگرها میپردازیم که چرخش محدودالزاویه تولید میکنند. این نوع، سیلندر نوسانی یا موتور نوسانی نامیده میشود. ساختار آن فشرده، ساده و کارآمد است — گشتاور بالایی تولید میکند و تنها فضای کوچکی برای نصب نیاز دارد و نصب آن نیز آسان است.
عملگرهای نوسانی در شاخصگذاری ابزار ماشین، عملیات خمکردن، بلند کردن یا چرخاندن اشیاء سنگین، قلابزدن (فلیپ کردن)، موقعیتیابی، ابزارهای نگهدارنده ماشینکاری، کنترلهای دریایی، عملیات شیرها و غیره استفاده میشوند.
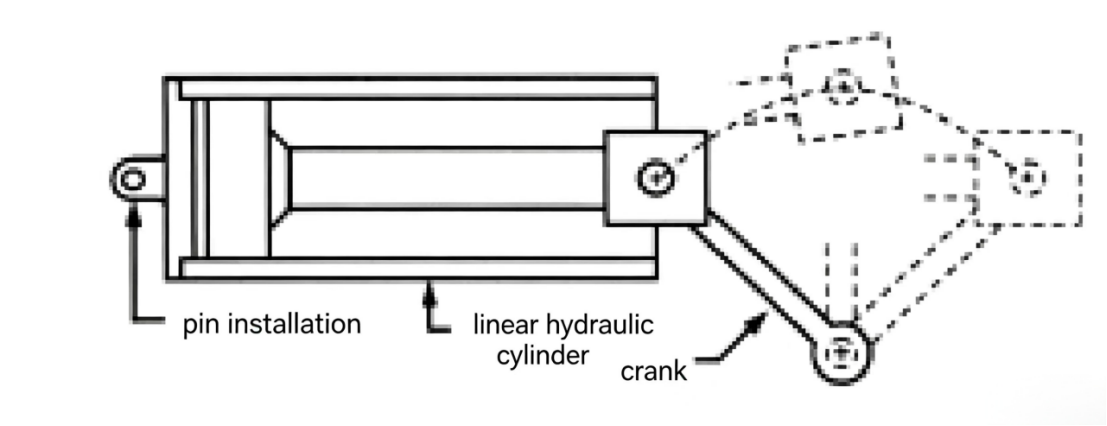
انواع متعددی از سیلندرهای نوسانی وجود دارد. سادهترین آنها مکانیزم نوسانی محرک توسط سیلندر هیدرولیک خطی است که انتهای بدنه سیلندر با یک پین نصب شده و میله پیستون به یک میلهبازو (کرانک) متصل است که محور را به چرخش درمیآورد. این سیلندر نوسانی را میتوان با استفاده از شیر جهتدهنده ۴ راهه کنترل کرد و در انتهای هر سفره، کلیدهای حدی نصب میشوند.
مانند تمام دستگاههای مکانیکی، این فعالساز نوسانی مبتنی بر سیلندر خطی دارای برخی ویژگیهای اساسی است؛ از جمله اینکه میتوان آن را از قطعات استاندارد و آمادهبهفروش ساخت، که این امر انعطافپذیری بالایی برای طراحان فراهم میکند و هزینهها را با امکان تأمین آسان قطعات یدکی، پایین نگه میدارد.
با این حال، این نوع فعالساز نوسانی ویژگیهای نامطلوبی نیز دارد: میله پیستون محافظتنشده است و مستقیماً با محیط اطراف تماس دارد، بهویژه اینکه معمولاً مکانیزم چرخدنده (کرانک) در آن در برابر نشتی آببندی نشده است و خطرات ایمنی ایجاد میکند. همچنین، شفت محرک معمولاً بارهای جانبی بزرگی را تحمل میکند که منجر به خرابی زودهنگام، سایش بیش از حد و گیرکردن میشود.
برای این نوع خاص از فعالساز نوسانی، سیلندر هیدرولیکی باید آزادانه نوسان کند؛ بنابراین باید از اتصالات لاستیکی انعطافپذیر استفاده شود و در طول کل حرکت پیستون سیلندر، گشتاور خروجی ثابت نیست.
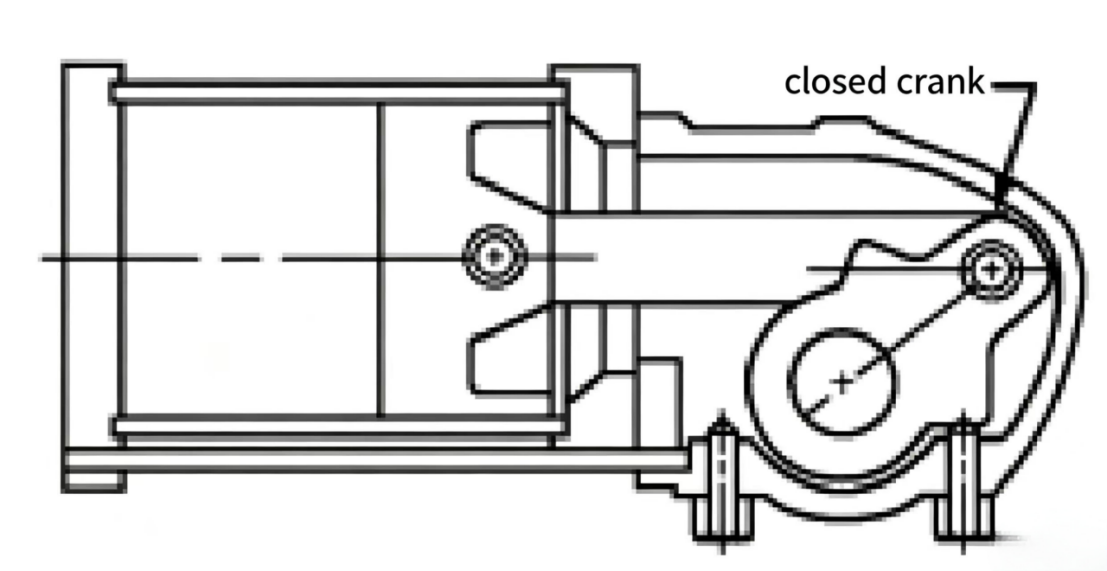
سیلندر نوسانی محصورشده در برگیرنده بسیار شبیه به مکانیسم نوسانی مبتنی بر سیلندر خطی فوق است. این سیلندر محصورشده دارای پوشش محافظی است که میله پیستون و میلهی کرانک را در بر میگیرد. شفت محرک معمولاً دارای تکیهگاه اضافی بلبرینگ است تا از وارد شدن بارهای جانبی شدید جلوگیری شود. این نوع سیلندر قابلیت نصب شیرهای سولنوئیدی، کلیدهای حدی یا کلیدهای تعیین طول حرکت را دارد. محدودهی طول حرکت معمولاً قابل تنظیم بین حدود ۸۵° تا ۱۰۰° است.
نوع دیگری سیلندر نوسانی با بازگشت فنری است که از یک سیلندر هیدرولیکی همراه با فنر بازگشتی برای بازگرداندن شفت محرک به موقعیت اولیهاش استفاده میکند. سیلندرهای نوسانی با بازگشت فنری قادر به تولید گشتاور تا ۵۰۰۰ اینچ-پوند (۵۶۵ نیوتنمتر) هستند.

رایجترین سیلندر نوسانی، نوع دندهای-پینیون است. این نوع میتواند گشتاور خروجی ثابتی را در هر دو جهت و در طول کل چرخش حفظ کند. در این پیکربندی، فشار هیدرولیک بر پیستون اثر کرده و دندهای متصل به پیستون را به حرکت درمیآورد که باعث چرخش چرخدندهٔ پینیون و در نتیجه چرخش شفت میشود. سیلندرهای استاندارد دندهای-پینیون دارای زاویهٔ چرخش ۹۰°، ۱۸۰°، ۳۶۰° یا حتی بیشتر هستند. گشتاور خروجی سیلندرهای دندهای-پینیون میتواند به ۵۲٬۰۰۰٬۰۰۰ اینچ-پوند (۵٬۸۷۶٬۰۰۰ نیوتون-متر) برسد.

همچنین موتور نوسانی تیغهای نیز موجود است. این نوع میتواند تکتیغه یا چندتیغه باشد. یک موتور تکتیغه قادر به چرخش ۲۸۰° است؛ در حالی که یک موتور دو تیغهای میتواند ۲۰۰° بچرخد. گشتاور خروجی موتور دو تیغهای دو برابر گشتاور موتور تکتیغه است. این نوع موتور نوسانی میتواند گشتاور خروجی تا ۵۰۰٬۰۰۰ اینچ-پوند (نیوتون-متر) تولید کند.

نوع دیگری از موتورهای نوسانی وجود دارد که گشتاور را با استفاده از مکانیزم شیار حلزونی تولید میکند. تغییرات در طول و گام شیار، امکان تنظیم دامنه چرخشی را در محدوده وسیعی فراهم میسازد. این نوع موتور نوسانی دارای یک محور شیار حلزونی و یک جعبه پیستون داخلی شیاردار روی آن است — چرخش جعبه پیستون توسط میلههای راهنما محدود شده است. هنگامی که جعبه پیستون درون سیلندر حرکت میکند، باعث چرخش محور شیار میشود. دامنههای استاندارد چرخش عبارتند از ۹۰°، ۱۸۰°، ۲۷۰° و ۳۶۰°، و گشتاور خروجی تا ۱٬۰۰۰٬۰۰۰ اینچ-پوند (۱۳٬۰۰۰ نیوتن-متر) قابل دستیابی است.
موتورهای نوسانی زنجیر و چرخ دنده از پیستونها، زنجیرها و چرخدندهها برای به حرکت درآوردن محور استفاده میکنند. این عملگر معمولاً دارای یک پیستون بزرگ (به عنوان وسیله محرک) برای کشیدن زنجیر و یک پیستون کوچک برای جلوگیری از نشت روغن از مسیر بازگشت زنجیر است. گشتاور خروجی میتواند به حدود ۲۳٬۰۰۰ اینچ-پوند (۲٬۵۹۹ نیوتن-متر) برسد و چرخش محور محرک تا پنج دور کامل یا ۱٬۸۰۰° قابل دستیابی است.
برای انتخاب مناسبترین سیلندر نوسانی برای یک کاربرد خاص، تطبیق گشتاور، سرعت و روش عملکرد همگی در این فرآیند نقش دارند. انتخاب واقعی موتورهای نوسانی را در فصل دیگری توضیح خواهیم داد و به بحث بیشتری درباره تعیین اینکه آیا سیلندر تکعمل یا دوعمل باشد، آیا باید از موقعیتیابی حلقه بسته استفاده شود، آیا نیاز به جذب ضربه وجود دارد یا خیر، پرداختهایم. همچنین فرکانس عملکرد یا دوره چرخه نیز مورد بررسی قرار خواهد گرفت.
سرعت اجرایی تابعی از دبی جریان (گالن در دقیقه یا لیتر در دقیقه) است.
سرعت خطی میله پیستون سیلندر هیدرولیکی به سرعتی بستگی دارد که با آن پمپ مایع را به اتاقک پیستون سیلندر تزریق میکند (گالن در دقیقه یا لیتر در دقیقه). سرعت چرخشی شفت محرک موتور هیدرولیکی نیز به دبی جریان (گالن در دقیقه یا لیتر در دقیقه) تزریقشده به موتور هیدرولیکی بستگی دارد.
نیروی خروجی اجرایی تابعی از فشار (پوند بر اینچ مربع یا بار) است.
نیروی خروجی یک سیلندر برحسب psi (بار) بیان میشود — نیروی خروجی اعمالشده بر محور پیشران موتور توسط فشار واردبر سطح آشکار مونتاژ چرخان موتور تعیین میشود. توان تولیدشده توسط یک اکچوئیتور تابعی از حاصلضرب سرعت اکچوئیتور در نیروی خروجی آن است.
برای سیلندرها، نیروی خروجی برحسب psi و سرعت میله پیستون برحسب gpm بیان میشود. ضریب ثابت ۰٫۰۰۰۵۸۳ رابطه بین psi، gpm و توان را توصیف میکند. برای موتورها، نیروی خروجی برحسب گشتاور و سرعت عملیاتی موتور برحسب rpm بیان میشود. ضریب ثابت ۶۳۰۲۵ رابطه بین rpm، گشتاور و توان را توصیف میکند.

خوش آمدید به هاوو، یک کارخانه چینی تولیدچی دخت. تولید دختهای PU، رubber و PTFE. این دختها شامل دخت O-ring، دخت پیستون، دخت گیردار، دخت گری رینگ و دخت گاز میشود.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}