خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]
خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]

طراحی شکن سنگ هیدرولیکی به معنای محاسبهٔ پارامترهای ساختاری است که نیازمندیهای عملکردی تعیینشده در مشخصات طراحی را برآورده میسازند. با این پارامترهای ساختاری، شکن سنگ هیدرولیکی میتواند انرژی ضربهای و فرکانس ضربهای مورد نیاز را تأمین کند.
باید تأکید قویای بر این نکته گذاشته شود که شکن سنگ هیدرولیکی انرژی ضربهای و فرکانس ضربهای را از طریق حرکت جلو و عقب پیستون در یک سفر ثابت تولید میکند. اس درون بدنه سیلندر. در این حرکت ثابت، پیستون بهصورت چرخهای مداوم حرکت میکند: شتاب در حرکت بازگشتی → کاهش سرعت در حرکت بازگشتی (ترمز) → کاهش سرعت حرکت بازگشتی تا صفر → شتاب در حرکت قدرتی → برخورد با نقطه ضربه با بیشترین سرعت ولت م → برخورد با انتهای چکش (انتقال انرژی ضربه) → توقف و آغاز چرخه بعدی. این حرکت ثابت اس به نام حرکت پیستون شناخته میشود؛ که اساس مهمی برای تعیین ابعاد بدنه سیلندر محسوب میگردد.
پیستون درون بدنه سیلندر بهصورت رفتوبرگشت حرکت میکند. از نقطه ضربه شروع میشود و در حرکت بازگشتی شتاب گرفته و به بیشترین سرعت حرکت بازگشتی میرسد ولت م ، سپس به دلیل تغییر وضعیت شیر، شروع به کاهش سرعت میکند؛ سرعت بهسرعت از ولت م به صفر میرسد — پیستون در نقطه مرگ بالایی متوقف میشود. حرکتی که پیستون طی میکند، «حرکت بازگشتی» نامیده میشود. در این لحظه، از آنجا که شیر هنوز در وضعیت اولیه خود قرار دارد، پیستون شروع به شتابگیری در طول «حرکت توان» میکند تا به نقطه برخورد برسد. هنگامی که پیستون با انتهای چکشک تماس پیدا میکند، سرعت آن به حداکثر مقدار خود میرسد — که این حداکثر سرعت را «حداکثر سرعت برخوردی پیستون» مینامند. ولت م حرکتی که پیستون از نقطه مرگ بالایی تا برخورد با انتهای چکشک طی میکند، «حرکت توان» نامیده میشود. واضح است که حرکت بازگشتی و حرکت توان باید برابر باشند.
برای بررسی عمیقتر نظریه طراحی شکنندههای سنگی هیدرولیکی، ابتدا درک سرعت پیستون، فشارهای مختلف در محفظهها و توزیع و تغییر جریان در طول عملیات بسیار مفید است. دلایل و جهت تغییرات پارامترهای کاری شکننده سنگی هیدرولیکی در طول عملیات در شکل ۲-۴ نشان داده شدهاند. 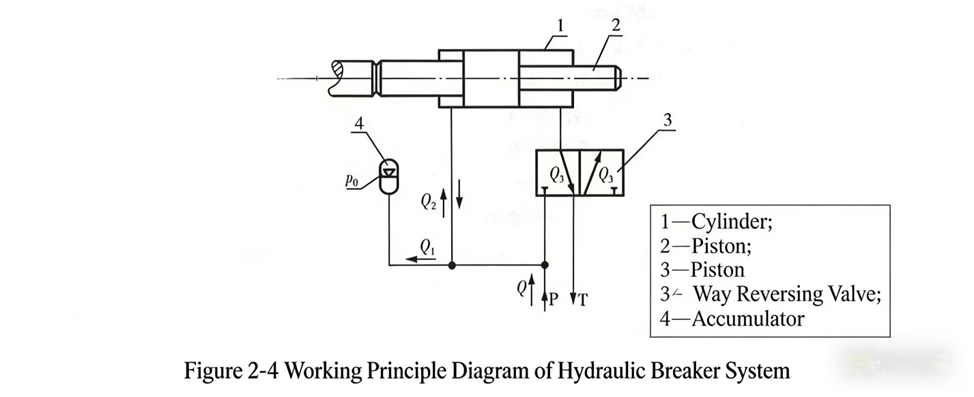
p 0فشار پیشبارگذاری نیتروژن در انباشتهکننده است؛ Q جریانی است که توسط پمپ به شکننده سنگی هیدرولیکی تحویل داده میشود؛ Q 1دمای جریان ورودی آکومولاتور (+) و جریان خروجی (−) است؛ Q 2جریان ورودی (+) و جریان خروجی (−) اتاقهی جلوی پیستون است، با Q = Q 1 + Q 2. Q 3جریان ورودی (+) و جریان خروجی (−) اتاقهی عقب پیستون است؛ p فشار سیستم است.
شکل ۲-۴ پیستون را در ابتدای حرکت برگشتی نشان میدهد. جریان پمپ Q وارد سیستم میشود؛ بخشی از آن ( Q 2) وارد اتاقهی جلوی پیستون شده و حرکت برگشتی آن را انجام میدهد، در حالی که اتاقهی عقب روغن را به مخزن تخلیه میکند ( Q 3)؛ بخش دیگر ( Q 1) وارد آکومولاتور شده و نیتروژن را فشرده میسازد، بنابراین فشار سیستم p از فشار پیشبارگذاری آکومولاتور آغاز میشود p 0و بهطور مداوم افزایش مییابد تا زمانی که Q 1وارد میشود. حرکت شکننده هیدرولیکی سنگ، بر اساس وضعیت کاری پیستون، عموماً به سه مرحله تقسیم میشود که در ادامه توضیح داده میشوند:
(۱) شتابگیری پیستون در حین حرکت بازگشتی
پیستون حرکت بازگشتی خود را از نقطه ضربهزنی آغاز میکند. با تزریق مداوم جریان توسط پمپ، فشار سیستم p ↑ → سرعت پیستون ولت ↑ → Q 2↑ → Q 1↓ → Q 3↑ و روغن بهطور مداوم به مخزن تخلیه میشود. از آنجا که سرعت پیستون ولت ↑ → Q 2↑ → Q 1↓ تا زمانی که Q 1= ۰ شود. ویژگی این دوره این است که ولت ↑ و p ↑. هنگامی که Q 1= ۰ باشد، یک نقطه عطف ظاهر میشود: فشار p دیگر افزایش نمییابد، اما سرعت پیستون همچنان روند افزایشی دارد (زیرا نیروی محرکه برای حرکت بازگشتی پیستون همچنان وجود دارد). پس از این نقطه عطف، به دلیل اینکه ولت ↑، دبی پمپ Q دیگر نمیتواند نیاز دبی مربوط به حرکت پیستون را تأمین کند، یعنی Q 2 > Q . برای تأمین نیاز دبی حفره جلویی پیستون، انباشتهکننده (آکومولاتور) اکنون باید روغن را تخلیه کند تا کمبود دبی پمپ را جبران کند. بر اساس اصل تعادل دبی، Q 2 = Q + Q 1; در این لحظه Q 1دبی خارجشده از آکومولاتور و واردشده به حفره جلویی پیستون است، تا زمانی که ولت ↑ به ولت = ولت م ، شیر تغییر وضعیت میدهد و پیستون وارد فاز کاهش سرعت حرکت بازگشتی میشود.
(۲) کاهش سرعت پیستون در حرکت بازگشتی
در طول حرکت بازگشتی، از آنجا که شانه جلویی پیستون از سوراخ بازخورد عبور کرده است، شیر تغییر وضعیت داده و جهت نیروی وارد بر پیستون را معکوس میکند؛ بنابراین نیروی محرک در جهت معکوس بر پیستون اعمال میشود و پیستون شروع به کاهش سرعت میکند تا اینکه ولت = ۰ شود. در این لحظه حرکت بازگشتی کامل میشود؛ پیستون به نقطه مرگ بالایی رسیده و کل طول حرکت را طی کرده است. اس و آماده شروع حرکت قدرتی است.
(۳) حرکت قدرتی پیستون
هنگامی که سرعت پیستون به ولت = ۰ برسد، نیروی وارد بر پیستون معکوس میشود، بنابراین سرعت پیستون نیز معکوس شده و از '+' به '−' تغییر میکند. سپس پیستون تحت نیروی معکوس شروع به شتابگیری در حرکت قدرتی میکند. در ابتدای شتابگیری حرکت قدرتی، سرعت پیستون از ولت = ۰ شروع میشود، لحظهای که مصرف روغن پیستون ولت صورت میگیرد. Q 3= ۰؛ کل دبی پمپ Q به انباشتهکننده جریان مییابد، Q 1 = Q , Q 2= ۰. هنگامی که سرعت حرکت تواندهندهٔ پیستون ولت ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. در اینجا باید توجه داشت که از آنجا که مساحت اتاقک جلویی آمپر 2از مساحت اتاقک عقبی کوچکتر است، آمپر 1بر اساس اصل تعادل جریان، باید Q 3 = Q 2 + Q − Q 1آن برگزار شد، با ولت ↑ و Q 1↓ تا زمانی که Q 1= ۰ باشد. این بدان معناست که ولت ↑؛ در این لحظه کل دبی پمپ Q کاملاً به اتاقک عقبی پیستون تزریق میشود، یعنی Q 3 = Q , Q 1= ۰، اما سرعت پیستون ولت هنوز به حداکثر سرعت نرسیده است ولت م . پیستون به شتاب ادامه می دهد؛ جریان پمپ Q نمی تواند دیگر تقاضا را برآورده کند، بنابراین آمپولیتر شروع به تکمیل جریان می کند، یعنی Q 3 = Q + Q 1(−) ، تا زمانی که پیستون با سرعت حداکثر به دم سنجاب برخورد کند ولت م . در لحظه برخورد، سرعت پیستون ناگهان تبدیل به ولت = 0 و خروجی پیستون انرژی تاثیر W به صورت خارجی، یک چرخه کاری را تکمیل می کند.
به عنوان جریان ورودی/افزایش آمپولیشن Q 1تغییرات، فشار سیستم p هم به همین ترتیب تغییر می کند. هنگام شارژ باتری Q 1= '+', فشار سیستم p ↑؛ زمانی که انباشتهکننده (اکومولاتور) محتوای خود را به بیرون تخلیه میکند، Q 1= '−', فشار سیستم p ↓. به عبارت دیگر، فرآیند کار شکننده سنگ هیدرولیکی همواره با تغییراتی در فشار سیستم همراه است. زمانی که بیشترین حجم روغن در انباشتهکننده ذخیره شده باشد، فشار سیستم در بالاترین مقدار خود قرار دارد. و زمانی که پیستون به نقطه ضربهزنی برسد، انباشتهکننده بیشترین حجم روغن را تخلیه کرده است — این لحظه، لحظه کمترین فشار سیستم است. بنابراین، از زمان راهاندازی شکننده سنگ هیدرولیکی تا رسیدن آن به حالت پایدار کاری، فشار کاری سیستم آن p همیشه بین یک فشار حداکثری p حداکثر و یک فشار حداقلی نوسان میکند p min ، و امکان اینکه این فشار ثابت و بدون تغییر باقی بماند، بههیچوجه وجود ندارد. شکل ۲-۵ تغییرات تمامی پارامترهای سیستم را در حین کارکرد شکننده سنگ هیدرولیکی نشان میدهد. 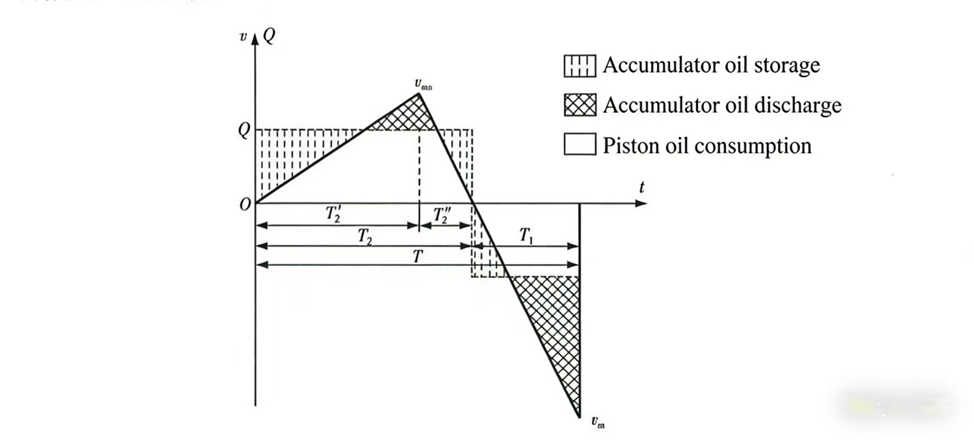
شکل ۲-۵: تغییرات پارامترهای سیستم در حین کارکرد شکن سنگ هیدرولیکی [راهنمای نمادها: خطدار = شارژ آکومولاتور؛ خطدار مورب = تخلیه آکومولاتور؛ سفید = مصرف روغن پیستون]
فرآیند کاری توضیحدادهشده در بالا نشان میدهد که تغییرات پارامترهای کاری بسیار پیچیده است — یعنی این سیستم غیرخطی است. این امر برای تحلیل و پژوهش نظری عمیق، دشواریهای قابلتوجهی ایجاد میکند. در واقع، این یکی از دلایل اصلی عقبماندگی پژوهشهای نظری در زمینه شکنهای سنگ هیدرولیکی نسبت به توسعه محصولات است.
پژوهشگران جهانی عموماً دو رویکرد فنی متفاوت را در پژوهشهای نظری درباره دستگاههای ضربهای هیدرولیکی (شکنهای سنگ هیدرولیکی) در پیش گرفتهاند: پژوهش مبتنی بر نظریه سیستمهای خطی و پژوهش مبتنی بر نظریه سیستمهای غیرخطی.
۱) تحقیقات مبتنی بر نظریه سیستمهای خطی فرض میکنند که نیروی وارد بر پیستون ثابت است، سرعت پیستون بهصورت خطی و با نرخ یکنواخت افزایش مییابد و برخی عوامل مؤثر نادیده گرفته میشوند؛ بر این اساس، یک مدل ریاضی خطی برای تحقیقات نظری ایجاد میشود. این روش تحقیق آشکارا ساده است و میتواند برخی از مسائل عملی را حل کند، اما دقت کافی ندارد و خطاهای قابل توجهی دارد.
۲) تحقیقات مبتنی بر نظریه سیستمهای غیرخطی از معادلات دیفرانسیل غیرخطی مرتبه بالا برای توصیف الگوهای حرکتی شکستدهنده سنگ هیدرولیکی استفاده میکنند و حرکتشناسی و دینامیک پیستون شکستدهنده سنگ هیدرولیکی را با دقت بیشتری نمایش میدهند. این تحقیقات غیرخطی از لحاظ دقت بیشتر از تحقیقات خطی هستند، اما همچنان متکی به برخی فرضیات هستند. اگرچه این روش میتواند پدیدههای فیزیکی خاصی از ضربه هیدرولیکی را با دقت بیشتری آشکار سازد، اما حل آن دشوار است، تفسیر آن ساده نیست و تنها میتوان از طریق محاسبات کامپیوتری راهحلهای عددی آن را بهدست آورد که این امر استفاده از آن را نامناسب میسازد.
علاوه بر این دو رویکرد، نویسندگان پس از سالها تحقیقات متمرکز، نظریه طراحی متغیر انتزاعی را برای شکستندهندههای سنگ هیدرولیکی پیشنهاد کردند، نظریه طراحی متغیر انتزاعی برای شکستندهندههای سنگ هیدرولیکی (مکانیزمهای ضربهای هیدرولیکی). با استفاده از نظریه طراحی متغیر انتزاعی، میتوان راهحلهای تحلیلی برای شکستندهندههای سنگ هیدرولیکی یافت که قادر به آشکارسازی عمیق الگوهای درونی حرکت این شکستندهندهها بوده و پایهای نظری برای نوآوریهای فنی توسط کاربران فراهم میکند.
روش تحقیق نظریه طراحی متغیر انتزاعی شکستدهنده هیدرولیکی سنگ: در این روش، غیرخطی بودن پارامترهای کاری شکستدهنده هیدرولیکی سنگ مورد پذیرش قرار میگیرد، اما با استفاده از تبدیل نیروی معادل، سیستم غیرخطی بهصورت خطیسازی میشود تا بتوان آن را با روشهای سیستمهای خطی مطالعه کرد و راهحلهای تحلیلی بهدست آورد. پارامترهای کاری و ساختاری شکستدهندههای هیدرولیکی سنگ که با این روش بهدست میآیند، دقت قابلتوجهی دارند و محاسبات آن ساده است. نظریه طراحی متغیر انتزاعی شکستدهنده هیدرولیکی سنگ در فصلهای بعدی بهطور خاص مورد بررسی قرار خواهد گرفت.

خوش آمدید به هاوو، یک کارخانه چینی تولیدچی دخت. تولید دختهای PU، رubber و PTFE. این دختها شامل دخت O-ring، دخت پیستون، دخت گیردار، دخت گری رینگ و دخت گاز میشود.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}