خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]
خیابان موفو ای، شماره 33-99، منطقه گولو، نانجینگ، چین [email protected] | [email protected]

ایده تحقیقاتی پشت نظریه طراحی متغیر انتزاعی: فارغ از اینکه پارامترهای کاری شکستدهنده سنگ هیدرولیکی در حین عملیات چگونه تغییر میکنند، دو پارامتری که نیازمندیهای طراحی را برآورده میسازند — انرژی ضربهای W H و فرکانس ضربه f H — نباید تغییر کنند؛ در عوض، سایر پارامترها از اهمیت خاصی برای طراح، و بهویژه برای کاربر، برخوردار نیستند. با این حال، طراح باید توجه ویژهای به طول حرکت پیستون داشته باشد اس ، زیرا هر رفتاری که پیستون از خود نشان میدهد در یک طول حرکت ثابت انجام میشود اس ، و طول حرکت پیستون اس توسط ساختار محدود شده است — نمیتواند دلخواه باشد. طول حرکت بسیار بزرگ از نظر ساختار مکانیکی مجاز نیست؛ و طول حرکت بسیار کوچک نیز نمیتواند نیازهای انرژی ضربه و فرکانس ضربه را برآورده کند. به عبارت دیگر، این محدودیتی بر عملکرد شکن سنگ هیدرولیکی است و باید مقداری بهینه وجود داشته باشد.
روش برخورد با مسئله محاسبه طراحی شکن سنگ هیدرولیکی — که در واقع یک سیستم غیرخطی است — با استفاده از روشهای خطی، محتوای اصلی این فصل است.
— پایه نظری تبدیل یک سیستم غیرخطی به یک سیستم خطی
هنگامی که شکن سنگ هیدرولیکی در حال کار است، پارامترهای عملیاتی — مانند فشار سیستم p ، سرعت پیستون ولت ، شتاب آمپر و بار پیستون — همه اینها بهصورت غیرخطی تغییر میکنند و توابعی از زمان هستند. محاسبه چنین سیستمی بسیار دشوار و پیچیده است. اما هدف طراحی در این کتاب نسبتاً ساده است: یافتن پارامترهای ساختاری و پارامترهای عملیاتی یک شکستدهنده سنگ هیدرولیکی که بتواند انرژی ضربه مورد نیاز را تأمین کند. W H و فرکانس f H فرمول انرژی ضربه عبارت است از:
W H = ( م / ۲) ولت 2م (3.1)
جایی که: م — جرم پیستون، مقدار ثابت؛
ولت م — سرعت لحظهای در لحظه برخورد پیستون با انتهای چکشک، یعنی بیشینه سرعت ضربه؛ این سرعت است که باید در طراحی تضمین شود.
دو شرط برای اطمینان از دستیابی به انرژی ضربه مورد نیاز وجود دارد: پیستون باید جرم مشخصی و سرعت مشخصی داشته باشد. در یک شکستدهنده سنگ هیدرولیکی، جرم پیستون م در طول حرکت تغییر نمیکند. بنابراین، تضمین دستیابی به انرژی ضربه یعنی تضمین رسیدن به بیشینه سرعت ضربه ولت م است.
باید توجه داشت که حرکت پیستون در یک سفر (استروک) مشخص انجام میشود. به عبارت دیگر، هدف محاسبات طراحی شکن سنگ هیدرولیکی این است که اطمینان حاصل شود در یک سفر مشخص، پیستونی با جرم ثابت بهدرستی تا سرعت برخورد حداکثر تعیینشده شتاب یابد. ولت م در زمان چرخهی مشخصشده ت ، به انتهای چکش (چیزل) برخورد کند و انرژی برخورد تعیینشده را منتقل نماید. W H تغییرات لحظهای آمپر , ولت ، و p در حین حرکت برای هدف محاسبات طراحی اهمیتی ندارد و میتوان آنها را نادیده گرفت. تضمین زمان چرخه ت همچنین فرکانس برخورد تعیینشده را تضمین میکند. f H .
زمان چرخه ت و فرکانس ضربه f H رضایت دادن f H = ۶۰ ÷ ت , جایی که ت زمان چرخهی کاری پیستون است (برای سادگی محاسبه، توقف کوتاه در نقطهی برخورد نادیده گرفته میشود).
اگر روشی ساده برای محاسبهٔ طراحی یافت شود که بتواند هدف فوق را محقق سازد، این روش در طراحی مهندسی مفید خواهد بود. همانطور که بهخوبی شناخته شده است، فشار روغن هیدرولیک پیستون را به حرکت درمیآورد؛ بر اساس قانون پایستگی انرژی و با نادیده گرفتن سایر تلفات انرژی، تمام این کار به انرژی جنبشی پیستون تبدیل میشود و بهصورت خارجی خروجی داده میشود که رابطهٔ زیر را نتیجه میدهد:
(م / ۲) ولت 2م = ∫ 0اس F (اس ) D اس (3.2)
معنای فیزیکی معادلهٔ (۳٫۲): سمت راست این معادله کار انجامشده توسط نیروی متغیر F (اس ) در طول ضربه است اس ؛ و سمت چپ آن انرژی جنبشی کسبشده توسط پیستون در حین حرکت در طول ضربه است. اس .
برای دستیابی به محاسبهٔ خطیشده، میتوان تصور کرد که نیروی ثابتی F g همان کاری را که نیروی متغیر F (اس ) در طول همان ضربه انجام میدهد، انجام میدهد. اس بنابراین نیروی ثابت F g میتواند جایگزین نیروی متغیر شود. F (اس ) در محاسبه خطیشده با اثر برابر، به دست میآید:
(م / ۲) ولت 2م = ∫ 0اس F (اس ) D اس = F g × اس (3.3)
جایگذاری معادله (۳٫۱) در معادله (۳٫۳) نتیجه میدهد:
F g = W H / اس (3.4)
در معادله (۳٫۴)، نیروی ثابت F g نیروی معادل نامیده میشود؛ این نیرو دقیقاً همان کار را که نیروی متغیر انجام میدهد، انجام میدهد. F (اس ).
معادله (۳٫۴) فرمول محاسبه نیروی معادل است. انرژی ضربه W H = ( م /2)ولت 2م توسط وظیفه طراحی تعیین میشود و یک پارامتر شناختهشده است. حرکت (استروک) اس را میتوان از محاسبات سینماتیک به دست آورد و این نیز شناختهشده است؛ بنابراین نیروی معادل مورد نیاز برای دستیابی به انرژی ضربه مورد نیاز قابل محاسبه است. انتخاب صحیح حرکت طراحی اس و فرکانس f H و همچنین بهینهسازی حرکت اس به تدریج در فصلهای بعدی معرفی خواهند شد.
این نیروی معادل در محاسبات طراحی شکستدهندههای هیدرولیکی سنگ بسیار مفید است. بر اساس این نیروی معادل، میتوان سطح مقطع فشاربر پیستون — یعنی ابعاد سازهای پیستون — را تعیین کرد، شرایط کاری و حجم مؤثر آکومولاتور را مشخص نمود و همچنین محاسبات سینماتیکی و دینامیکی برای شکستدهندههای هیدرولیکی سنگ را انجام داد.
سطح مقطع فشاربر پیستون عبارت است از:
آمپر = F g / p g (3.5)
در معادله (۳٫۵)، p g فشار معادل روغن سیستم است که متناظر با مفهوم نیروی معادل بوده و یک متغیر فرضی میباشد. با این حال، با توجه به اینکه حرکت روغن با مقاومت همراه است، فشار واقعی روغن در سیستم کاری باید از فشار معادل روغن بیشتر باشد؛ بنابراین فشار اسمی مورد استفاده در طراحی عبارت است از:
p H = KP g (3.6)
در معادله (۳٫۶)، K = ۱٫۱۲ تا ۱٫۱۵ ضریب مقاومت در عملیات سیستم هیدرولیکی است. مقدار p H در عمل بر اساس نیازمندیهای کلی سیستمی که در حال طراحی است انتخاب میشود، بنابراین سطح باربر فشار روی پیستون قابل محاسبه و مشخص میگردد. لذا:
آمپر = KF g / p H (3.7)
جایگزین کردن معادله (۳٫۴) میدهد:
آمپر = کیلووات H \/ ( p H اس ) (۳٫۸)
لازم به توضیح است که نتایج محاسبهشده از نظر سینماتیک و دینامیک بر اساس عبارات فوق کاملاً واقعبینانه نیستند — بلکه بهصورت متغیر خطی توصیف شدهاند؛ یعنی حرکت پیستون بهصورت شتابدار یکنواخت و کاهششتابدار یکنواخت در نظر گرفته شده است. با این حال، زمان چرخه پیستون ت ، حداکثر سرعت ولت م ، و طول حرکت اس مقادیر واقعی هستند؛ و برای ارضای نیازمندیهای طراحی، ساده، کاربردی و دقیق میباشند.
در واقع، مهمترین پرسش این است که آیا انرژی ضربه W H ، فرکانس ضربه f H و جریان Q راندن شکننده سنگ هیدرولیکی واقعی است. زیرا سطح مقطع پیستون در برابر فشار آمپر ثابت است و طول حرکت (سرویس) اس نیز ثابت است، بنابراین جریان پمپ Q نیز لزوماً واقعی است.
به این ترتیب، بهکارگیری اصل نیروی معادل میتواند محاسبات طراحی غیرخطی شکننده سنگ هیدرولیکی را به محاسبات خطی سادهسازی کند؛ هم محاسبات سینماتیکی و هم محاسبات دینامیکی بهطور قابلتوجهی سادهسازی میشوند و بهصورت حرکت با شتاب یکنواخت و کاهششتاب یکنواخت در نظر گرفته میشوند.
بینش علمی نیروی معادل این است که فرآیند پیچیده را نادیده گرفته و ماهیت مسئله را درک کرده و مسئله غیرخطی را خطیسازی کنیم. اما نتایج حاصل بسیار واقعی و قابلاطمینان هستند و در تعمیق درک و بررسی الگوهای عملکردی شکننده سنگ هیدرولیکی مؤثرند.
بر اساس اصل نیروی معادل، سرعت و نیروهای پیستون در شکل ۳-۱ نشان داده شدهاند که شامل سه مرحله است: شتابگیری در حرکت بازگشتی، کاهش سرعت در حرکت بازگشتی (ترمز کردن) و ضربهٔ کاری.
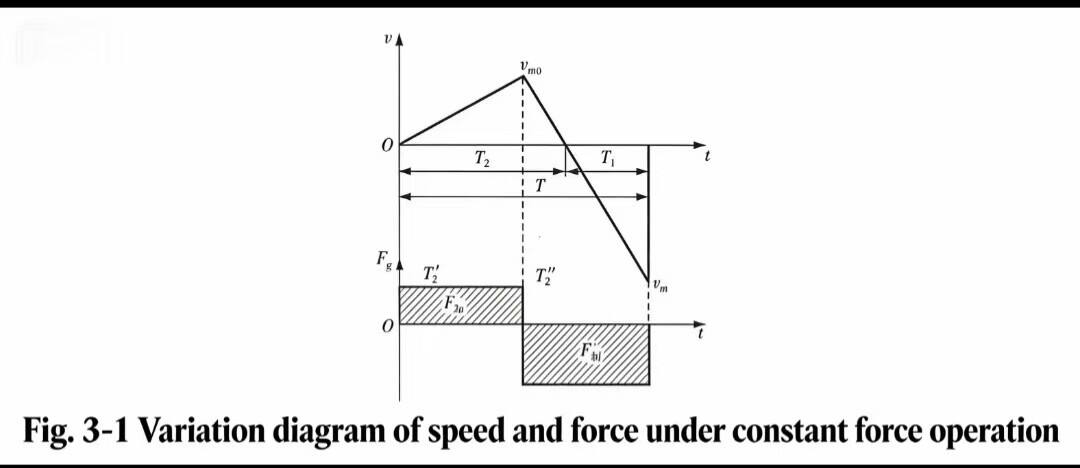
(۱) معادلهٔ دینامیکی برای مرحلهٔ شتابگیری در حرکت بازگشتی پیستون
فرض کنید نیروی محرک حرکت بازگشتی F 2g ، سرعت ولت و شتاب آمپر بهصورت [+] تعریف شدهاند. نیروی محرک معادل که پیستون را در حرکت بازگشتی شتاب میدهد، عبارت است از:
F 2g = p g آمپر ′2 = ما 2 (3.9)
جایی که: آمپر 2= [+] — شتاب حرکت بازگشتی پیستون؛
آمپر ′2— سطح مؤثر تحمل فشار اتاق جلویی پیستون؛
p g — فشار معادل سیستم.
(۲) معادلهٔ دینامیکی برای مرحلهٔ کاهش سرعت در حرکت بازگشتی پیستون
نیروی محرک معادل که باعث کندشدن پیستون در حین حرکت برگشتی میشود، عبارت است از:
F 3g = p g آمپر ′1 = ما 3 (3.10)
جایی که: آمپر 3= [−] — کندشدن (ترمز کردن) پیستون در حین حرکت برگشتی.
(۳) معادله دینامیکی برای مرحله حرکت قدرتی پیستون
نیروی محرک معادل که باعث شتابگیری پیستون در حین حرکت قدرتی میشود، عبارت است از:
F 1G = p g آمپر ′1 = ما 1 (3.11)
جایی که: آمپر 1= [−] — شتابگیری پیستون در حین حرکت قدرتی؛
آمپر ′1— سطح مؤثر تحمل فشار اتاق عقب پیستون.
مفهوم سطح مؤثر تحمل فشار بسته به سه اصل کار متفاوت شکستدهنده سنگ هیدرولیکی توضیحدادهشده در بالا متفاوت است؛ این مفهوم در فصل دینامیک بهطور دقیقتر بررسی شده است.

خوش آمدید به هاوو، یک کارخانه چینی تولیدچی دخت. تولید دختهای PU، رubber و PTFE. این دختها شامل دخت O-ring، دخت پیستون، دخت گیردار، دخت گری رینگ و دخت گاز میشود.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}