33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]
33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]

Desain pemecah batu hidrolik berarti menghitung parameter struktural yang akan memenuhi persyaratan kinerja yang ditetapkan dalam spesifikasi desain. Dengan parameter struktural ini, pemecah batu hidrolik dapat mencapai energi bentur dan frekuensi bentur yang dibutuhkan.
Harus ditekankan dengan tegas bahwa pemecah batu hidrolik menghasilkan energi bentur dan frekuensi bentur melalui gerak maju-mundur piston dalam langkah tetap S di dalam badan silinder. Selama langkah tetap ini, piston bergerak dalam siklus berkelanjutan: akselerasi langkah kembali → deselerasi langkah kembali (pengereman) → kecepatan langkah kembali turun menjadi nol → akselerasi langkah kerja → mencapai titik tumbuk dengan kecepatan maksimum v m → menumbuk ujung pahat (menghasilkan energi tumbukan) → berhenti, lalu memulai siklus berikutnya. Langkah tetap ini S disebut langkah piston; merupakan dasar penting dalam menentukan dimensi badan silinder.
Piston bergerak bolak-balik di dalam badan silinder. Dimulai dari titik tumbuk, piston mengalami akselerasi selama langkah kembali hingga mencapai kecepatan maksimum langkah kembali v mo , kemudian mulai mengalami deselerasi akibat perpindahan katup; kecepatan turun secara cepat dari v mo menuju nol — piston berhenti pada titik mati atas. Langkah yang ditempuh piston disebut langkah balik. Pada titik ini, karena katup masih berada dalam keadaan semula, piston mulai mengalami percepatan pada langkah kerja hingga mencapai titik tumbukan. Ketika piston bersentuhan dengan ekor pahat, kecepatannya telah mencapai nilai maksimum — yang disebut kecepatan tumbukan maksimum piston v m . Langkah yang ditempuh piston dari titik mati atas hingga menyentuh ekor pahat disebut langkah kerja. Jelaslah bahwa langkah balik dan langkah kerja harus sama.
Untuk mempelajari teori desain pemecah batu hidrolik secara lebih mendalam, sangat membantu untuk terlebih dahulu memahami kecepatan piston, tekanan berbagai ruang, serta distribusi dan variasi aliran selama operasi. Alasan serta arah perubahan parameter kerja pemecah batu hidrolik selama operasi ditunjukkan pada Gambar 2-4. 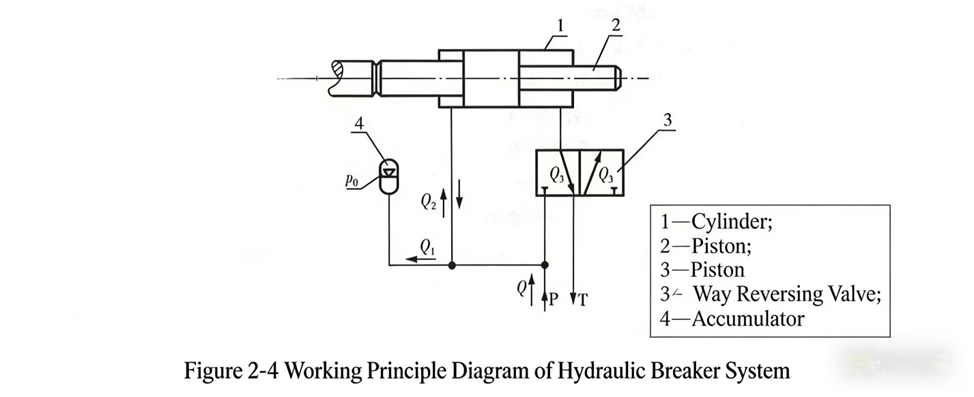
p 0adalah tekanan pengisian awal nitrogen pada akumulator; Q adalah aliran yang dikirimkan ke pemecah batu hidrolik oleh pompa; Q 1adalah aliran masuk akumulator (+) dan aliran keluar (−); Q 2adalah aliran masuk (+) dan aliran keluar (−) ruang depan piston, dengan Q = Q 1 + Q 2. Q 3adalah aliran masuk (+) dan aliran keluar (−) ruang belakang piston; p adalah tekanan sistem.
Gambar 2-4 menunjukkan piston pada awal langkah balik. Aliran pompa Q memasuki sistem; sebagian ( Q 2) memasuki ruang depan piston dan menggerakkan langkah baliknya, sedangkan ruang belakang mengalirkan oli ke tangki ( Q 3); bagian lain ( Q 1) memasuki akumulator dan memampatkan nitrogen, sehingga tekanan sistem p bermula dari tekanan pra-pengisian akumulator p 0dan terus meningkat saat Q 1mengalir masuk. Gerak pemecah batu hidrolik, berdasarkan kondisi kerja piston, secara umum dapat dibagi menjadi tiga tahap, yang dijelaskan sebagai berikut:
(1) Akselerasi langkah balik piston
Piston memulai langkah balik dari titik benturan. Saat pompa terus menyuntikkan aliran, tekanan sistem p ↑ → kecepatan piston v ↑ → Q 2↑ → Q 1↓ → Q 3↑, dan oli terus dibuang ke tangki. Karena kecepatan piston v ↑ → Q 2↑ → Q 1↓, hingga Q 1= 0. Karakteristik periode ini adalah v ↑ dan p ↑. Ketika Q 1= 0, muncul titik balik: tekanan p tidak lagi meningkat, tetapi kecepatan piston terus bertambah (karena gaya penggerak untuk langkah kembali piston masih ada). Setelah titik balik ini, karena v ↑, aliran pompa Q tidak lagi mampu memenuhi kebutuhan aliran untuk gerak piston, yaitu Q 2 > Q . Untuk memenuhi kebutuhan aliran ruang depan piston, akumulator kini harus mengalirkan oli guna menutupi kekurangan pompa. Berdasarkan prinsip keseimbangan aliran, Q 2 = Q + Q 1; pada saat ini Q 1adalah aliran yang keluar dari akumulator menuju ruang depan piston, hingga v ↑ ke v = v mo , katup beralih, dan piston memasuki fase perlambatan langkah balik.
(2) Perlambatan Langkah Balik Piston
Selama langkah balik, karena bahu depan piston telah melewati lubang umpan balik, katup beralih dan membalikkan arah gaya yang bekerja pada piston; gaya penggerak diterapkan pada piston dalam arah berlawanan, sehingga piston mulai melambat hingga v = 0. Langkah balik kini selesai; piston telah mencapai titik mati atas dan menempuh seluruh langkah S , siap untuk memulai langkah kerja.
(3) Langkah Kerja Piston
Ketika kecepatan piston turun menjadi v = 0, gaya pada piston membalik, sehingga kecepatan piston v juga membalik, berubah dari '+' menjadi '−'. Piston kemudian mulai berakselerasi pada langkah kerja di bawah pengaruh gaya yang telah dibalik. Pada awal akselerasi langkah kerja, kecepatan piston dimulai dari v = 0, pada saat itu konsumsi oli piston Q 3= 0; seluruh aliran keluar pompa Q mengalir ke akumulator, Q 1 = Q , Q 2= 0. Saat kecepatan langkah kerja v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. Perlu dicatat di sini bahwa karena luas ruang depan A 2lebih kecil daripada luas ruang belakang A 1, berdasarkan prinsip keseimbangan aliran, maka harus ada Q 3 = Q 2 + Q − Q 1, dengan v ↑ dan Q 1↓, hingga Q 1= 0. Ini berarti v ↑; pada saat ini seluruh aliran keluar pompa Q sepenuhnya diinjeksikan ke ruang belakang piston, yaitu. Q 3 = Q , Q 1= 0, tetapi kecepatan piston v belum mencapai kecepatan maksimum v m . Piston terus mengalami percepatan; aliran pompa Q tidak lagi mampu memenuhi kebutuhan, sehingga akumulator mulai melengkapi aliran, yaitu Q 3 = Q + Q 1(−), hingga piston menabrak ujung pahat pada kecepatan maksimum v m . Pada saat tumbukan terjadi, kecepatan piston secara tiba-tiba menjadi v = 0, dan piston mengeluarkan energi tumbukan S ke luar, menyelesaikan satu siklus kerja.
Karena aliran masuk/keluar akumulator Q 1berubah, tekanan sistem p juga berubah secara proporsional. Saat mengisi akumulator, Q 1= '+', tekanan sistem p ↑; ketika akumulator melepaskan oli ke luar, Q 1= '−', tekanan sistem p ↓. Dengan kata lain, proses kerja pemecah batu hidrolik selalu disertai perubahan tekanan sistem. Ketika jumlah oli maksimum telah diisi ke dalam akumulator, tekanan sistem berada pada titik tertinggi. Ketika piston mencapai titik tumbukan, akumulator telah melepaskan jumlah oli paling banyak — ini merupakan momen tekanan sistem terendah. Oleh karena itu, dari saat pemecah batu hidrolik mulai dihidupkan hingga mencapai kondisi operasi stabil, tekanan kerja sistemnya p selalu berayun bolak-balik antara tekanan maksimum p maks dan tekanan minimum p min , dan sama sekali tidak mungkin bersifat konstan serta tidak berubah. Gambar 2-5 menunjukkan variasi semua parameter sistem saat pemecah batu hidrolik beroperasi. 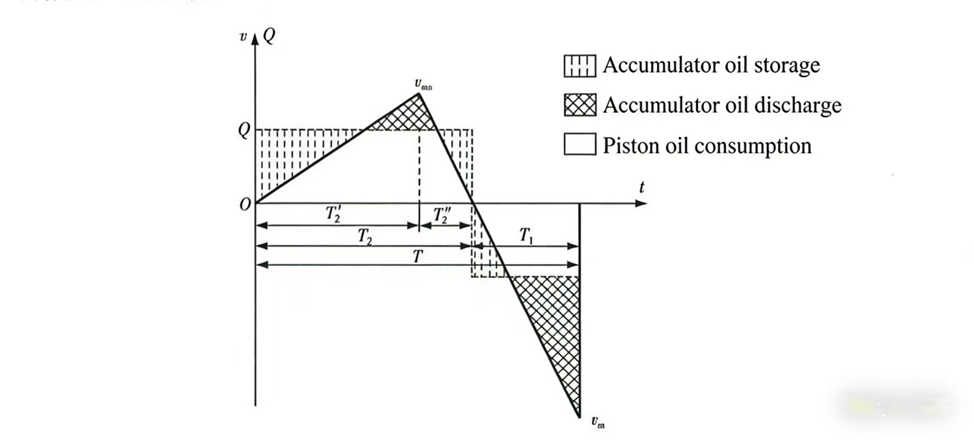
Gambar 2-5 Variasi parameter sistem selama operasi pemecah batu hidrolik [Keterangan: arsiran = pengisian akumulator; arsiran silang = pelepasan akumulator; putih = konsumsi oli piston]
Proses kerja yang dijelaskan di atas menunjukkan bahwa variasi parameter kerja cukup kompleks—yaitu merupakan sistem nonlinear. Hal ini menimbulkan kesulitan besar dalam analisis dan penelitian teoretis mendalam. Faktanya, ini merupakan salah satu alasan utama mengapa penelitian teoretis mengenai pemecah batu hidrolik tertinggal dibandingkan pengembangan produk.
Para peneliti di seluruh dunia umumnya menggunakan dua pendekatan teknis berbeda dalam penelitian teoretis mengenai perangkat tumbuk hidrolik (pemecah batu hidrolik): penelitian berbasis teori sistem linear dan penelitian berbasis teori sistem nonlinear.
1) Penelitian berdasarkan teori sistem linier mengasumsikan gaya pada piston konstan, kecepatan piston meningkat secara linier dengan laju seragam, dan beberapa faktor pengaruh diabaikan; model matematis linier dibangun berdasarkan asumsi ini untuk keperluan penelitian teoretis. Metode penelitian ini jelas sederhana dan mampu menyelesaikan sejumlah permasalahan praktis, namun tingkat akurasinya rendah dan mengandung kesalahan yang cukup besar.
2) Penelitian berdasarkan teori sistem nonlinier menggunakan persamaan diferensial nonlinier orde tinggi untuk menggambarkan pola gerak pemecah batu hidrolik, serta menggambarkan kinematika dan dinamika piston pemecah batu hidrolik secara lebih akurat. Penelitian nonlinier ini lebih akurat dibandingkan penelitian linier, namun tetap mengandalkan sejumlah asumsi. Meskipun mampu mengungkapkan beberapa fenomena fisik dampak hidrolik secara lebih akurat, penyelesaiannya sulit dilakukan, tidak mudah diinterpretasikan, dan hanya dapat menghasilkan solusi numerik melalui perhitungan komputer—sehingga kurang praktis dalam penerapannya.
Selain dua pendekatan ini, para penulis, setelah bertahun-tahun melakukan penelitian intensif, mengusulkan Teori Desain Variabel Abstrak untuk Pemecah Batu Hidrolik (mekanisme dampak hidrolik). Dengan menggunakan teori desain variabel abstrak, solusi analitis untuk pemecah batu hidrolik dapat diperoleh, yang mampu mengungkap secara mendalam pola-pola internal gerak pemecah batu hidrolik serta memberikan dasar teoretis bagi inovasi teknis oleh pengguna.
Pendekatan penelitian teori desain variabel abstrak pemecah batu hidrolik: mengakui sifat nonlinier dari parameter kerja pemecah batu hidrolik, namun menggunakan transformasi gaya ekuivalen untuk melinearisasi sistem nonlinier tersebut, sehingga dapat dikaji dengan metode sistem linier guna memperoleh solusi analitis. Parameter kerja dan parameter struktural pemecah batu hidrolik yang diperoleh dengan metode ini cukup akurat dan perhitungannya sederhana. Teori desain variabel abstrak pemecah batu hidrolik akan dibahas secara khusus pada bab-bab berikutnya.

Selamat datang di HOVOO, pabrik segel Cina. Produksi segel PU, Karet dan PTFE. Segel tersebut mencakup O-ring, segel piston, segel batang, Gray ring dan segel gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}