33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]
33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]

Gagasan penelitian di balik teori desain variabel abstrak: tidak peduli bagaimana parameter kerja pemecah batu hidrolik berubah selama operasi, dua parameter yang memenuhi persyaratan desain — energi benturan — S H dan frekuensi tumbukan f H tidak boleh berubah; sedangkan parameter lainnya tidak terlalu penting bagi perancang, apalagi bagi pengguna. Namun, perancang harus memberikan perhatian khusus pada langkah piston S , karena setiap gerak piston terjadi dalam rentang langkah yang tetap S , dan langkah piston S dibatasi oleh struktur — tidak dapat ditentukan secara sembarang. Langkah yang terlalu besar tidak diperbolehkan oleh struktur mekanis; langkah yang terlalu kecil tidak mampu memenuhi persyaratan energi benturan dan frekuensi benturan. Dengan kata lain, ini merupakan kendala terhadap operasi pemecah batu hidrolik, sehingga harus ada nilai optimal.
Cara menangani masalah perhitungan desain pemecah batu hidrolik — yang pada kenyataannya merupakan sistem nonlinear — dengan menggunakan metode linear merupakan isi inti bab ini.
— Dasar Teoretis untuk Mengubah Sistem Nonlinear menjadi Sistem Linear
Ketika pemecah batu hidrolik beroperasi, parameter kerja — seperti tekanan sistem p , kecepatan piston v , percepatan a , dan beban piston — semuanya berubah secara nonlinear dan merupakan fungsi waktu. Menghitung sistem semacam ini cukup sulit dan kompleks. Namun, tujuan desain dalam buku ini relatif sederhana: menentukan parameter struktural dan parameter kerja pemecah batu hidrolik yang mampu menghasilkan energi tumbukan yang dibutuhkan S H dan frekuensi f H . Rumus energi tumbukan adalah:
S H = ( m / 2) v 2m (3.1)
dimana: m — massa piston, konstan;
v m — kecepatan sesaat ketika piston menumbuk ujung pahat, yaitu kecepatan tumbukan maksimum; kecepatan inilah yang harus dijamin dalam desain.
Ada dua kondisi untuk memastikan energi tumbukan yang diperlukan tercapai: piston harus memiliki massa tertentu dan kecepatan tertentu. Pada pemecah batu hidrolik, massa piston m tidak dapat berubah selama gerak. Oleh karena itu, memastikan energi tumbukan tercapai berarti memastikan kecepatan tumbukan maksimum v m tercapai.
Perlu ditekankan bahwa gerak piston terjadi dalam langkah tertentu. Dengan kata lain, tujuan perhitungan desain pada pemecah batu hidrolik adalah memastikan bahwa, dalam langkah tertentu, piston dengan massa tetap dipercepat secara akurat hingga mencapai kecepatan tumbukan maksimum yang ditentukan v m dalam waktu siklus yang ditentukan T , menumbuk ujung pahat dan menghasilkan energi tumbukan yang ditentukan S H . Perubahan sesaat dari a , v , dan p selama gerak tidak penting bagi tujuan perhitungan desain dan dapat diabaikan. Memastikan waktu siklus T juga menjamin frekuensi tumbukan yang ditentukan f H .
Waktu siklus T dan frekuensi tumbukan f H memenuhi f H = 60 / T , di mana T adalah waktu siklus kerja piston (untuk mempermudah perhitungan, jeda singkat pada titik tumbukan diabaikan).
Jika metode perhitungan desain sederhana dapat ditemukan untuk mencapai tujuan di atas, metode tersebut akan berguna dalam desain teknik. Seperti diketahui umum, tekanan minyak hidrolik menggerakkan piston untuk melakukan kerja; berdasarkan hukum kekekalan energi dan dengan mengabaikan kehilangan energi lainnya, seluruh kerja ini diubah menjadi energi kinetik piston dan dikeluarkan ke luar, sehingga menghasilkan hubungan berikut:
(m / 2) v 2m = ∫ 0S F (S ) D S (3.2)
Makna fisik dari Pers. (3.2): ruas kanan merupakan kerja yang dilakukan oleh gaya variabel F (S ) sepanjang langkah S ; ruas kiri merupakan energi kinetik yang diperoleh piston saat bergerak sepanjang langkah S .
Untuk mencapai perhitungan terlinearisasi, dapat dibayangkan suatu gaya konstan F g yang melakukan kerja yang sama seperti gaya variabel F (S ) sepanjang langkah yang sama S . Jadi, gaya konstan tersebut F g dapat menggantikan gaya yang bervariasi F (S ) dalam perhitungan terlinearisasi dengan efek yang setara, menghasilkan:
(m / 2) v 2m = ∫ 0S F (S ) D S = F g × S (3.3)
Mensubstitusikan Pers. (3.1) ke dalam Pers. (3.3) menghasilkan:
F g = S H / S (3.4)
Dalam Pers. (3.4), gaya konstan F g disebut gaya ekuivalen; gaya ini melakukan usaha yang persis sama dengan gaya yang bervariasi F (S ).
Pers. (3.4) adalah rumus untuk menghitung gaya ekuivalen. Energi tumbukan S H = ( m /2)v 2m ditentukan oleh tugas desain dan merupakan parameter yang diketahui. Langkah S dapat diperoleh dari perhitungan kinematika dan juga diketahui; oleh karena itu, gaya ekuivalen yang diperlukan untuk mencapai energi tumbukan yang dibutuhkan dapat dihitung. Pemilihan langkah desain S dan frekuensi f H , serta optimalisasi langkah S , akan diperkenalkan secara bertahap pada bab-bab berikutnya.
Gaya ekuivalen ini sangat berguna dalam perhitungan desain pemecah batu hidrolik. Berdasarkan gaya ekuivalen tersebut, luas permukaan piston yang menahan tekanan—yakni dimensi struktural piston—dapat ditentukan, kondisi kerja dan volume efektif akumulator dapat ditentukan, serta perhitungan kinematika dan dinamika untuk pemecah batu hidrolik dapat dilakukan.
Luas permukaan piston yang menahan tekanan adalah:
A = F g / p g (3.5)
Dalam Pers. (3.5), p g adalah tekanan minyak ekuivalen sistem, yang berkorespondensi dengan konsep gaya ekuivalen, dan merupakan variabel virtual. Namun, mengingat gerak minyak melibatkan hambatan, tekanan kerja aktual sistem harus lebih tinggi daripada tekanan minyak ekuivalen; sehingga tekanan pengenal yang digunakan dalam desain adalah:
p H = KP g (3.6)
Dalam Pers. (3.6), K = 1,12 hingga 1,15 adalah koefisien hambatan untuk operasi sistem hidrolik. Nilai dari p H dalam praktiknya dipilih berdasarkan persyaratan keseluruhan sistem yang sedang dirancang, sehingga luas area piston yang menahan tekanan menjadi dapat dihitung dan diketahui. Oleh karena itu:
A = KF g / p H (3.7)
Mensubstitusi Pers. (3.4) menghasilkan:
A = KW H \/ ( p H S ) (3.8)
Perlu ditekankan bahwa hasil kinematika dan dinamika yang dihitung dari persamaan di atas tidak sepenuhnya realistis—hasil tersebut dijelaskan sebagai variasi linier, yaitu gerak piston dianggap mengalami percepatan seragam dan perlambatan seragam. Namun, waktu siklus piston T , kecepatan maksimum v m , dan langkah gerak S adalah nilai-nilai nyata; untuk memenuhi persyaratan desain, nilai-nilai tersebut bersifat sederhana, praktis, dan akurat.
Faktanya, pertanyaan paling kritis adalah apakah energi tumbukan S H , frekuensi tumbukan f H , dan aliran Q menggerakkan pemecah batu hidrolik adalah nyata. Karena luas permukaan piston yang menahan tekanan A tetap dan langkahnya S tetap, maka aliran pompa Q pun secara mutlak juga nyata.
Dengan cara ini, penerapan prinsip gaya ekuivalen dapat menyederhanakan perhitungan desain pemecah batu hidrolik nonlinier menjadi perhitungan linier; baik perhitungan kinematika maupun dinamika dapat disederhanakan secara signifikan dan diperlakukan sebagai gerak dipercepat seragam serta gerak diperlambat seragam.
Wawasan akademis dari gaya ekuivalen adalah mengabaikan proses kompleks, memahami inti permasalahan, serta melinierkan permasalahan nonlinier. Namun, hasil yang diperoleh sangat nyata dan andal, serta membantu memperdalam pemahaman dan eksplorasi pola operasi pemecah batu hidrolik.
Berdasarkan prinsip gaya ekuivalen, kecepatan dan gaya piston ditunjukkan pada Gambar 3-1, yang terdiri atas tiga tahap: akselerasi langkah kembali, deselerasi langkah kembali (pengereman), dan langkah kerja.
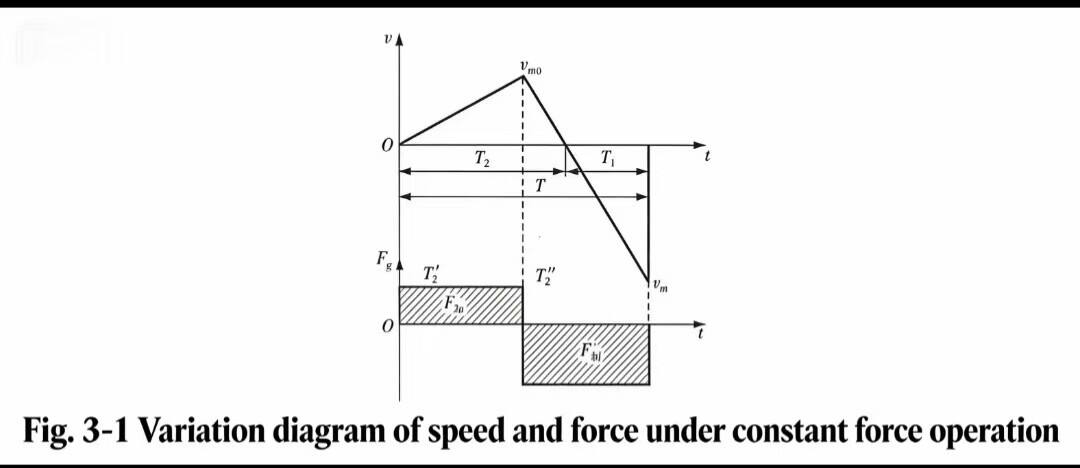
(1) Persamaan dinamika untuk tahap akselerasi langkah kembali piston
Misalkan gaya penggerak langkah kembali F 2g , kecepatan v , dan percepatan a didefinisikan sebagai [+]. Gaya penggerak ekuivalen yang mengakselerasi piston selama langkah kembali adalah:
F 2g = p g A ′2 = mA 2 (3.9)
dimana: a 2= [+] — percepatan langkah kembali piston;
A ′2— luas efektif permukaan piston yang menahan tekanan di ruang depan piston;
p g — tekanan ekuivalen sistem.
(2) Persamaan dinamika untuk tahap deselerasi langkah kembali piston
Gaya penggerak ekuivalen yang memperlambat piston pada langkah kembali adalah:
F 3g = p g A ′1 = mA 3 (3.10)
dimana: a 3= [−] — perlambatan (pengereman) piston pada langkah kembali.
(3) Persamaan dinamika untuk tahap langkah kerja piston
Gaya penggerak ekuivalen yang mempercepat piston pada langkah kerja adalah:
F 1G = p g A ′1 = mA 1 (3.11)
dimana: a 1= [−] — percepatan piston pada langkah kerja;
A ′1— luas area efektif yang menahan tekanan pada ruang belakang piston.
Konsep luas area efektif yang menahan tekanan berbeda-beda tergantung pada tiga prinsip kerja berbeda dari pemecah batu hidrolik yang dijelaskan di atas; konsep ini dibahas secara rinci dalam bab dinamika.

Selamat datang di HOVOO, pabrik segel Cina. Produksi segel PU, Karet dan PTFE. Segel tersebut mencakup O-ring, segel piston, segel batang, Gray ring dan segel gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}