33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]
33-99 No. Jl. Mufu E, Distrik Gulou, Nanjing, Tiongkok [email protected] | [email protected]

Secara teori, setiap pemecah batu hidrolik memerlukan akumulator bertekanan variabel—khususnya akumulator tekanan tinggi berukuran besar.
Akumulator tekanan tinggi, yang dipasang pada saluran masuk sistem pemecah batu hidrolik, memiliki tiga fungsi:
(1) Menyeimbangkan kelebihan dan kekurangan pasokan sistem serta konsumsi minyak. Ketika debit pompa lebih besar daripada konsumsi minyak sistem, akumulator tekanan tinggi menyerap kelebihan debit tersebut dan berfungsi sebagai perangkat penyimpan minyak. Ketika debit pompa lebih kecil daripada konsumsi minyak sistem, akumulator ini mengalirkan minyak untuk menutupi kekurangan tersebut dan berfungsi sebagai perangkat pengalir minyak. Akumulator tekanan tinggi berperan dalam menyeimbangkan kelebihan dan kekurangan aliran dalam sistem, serta merupakan komponen penting bagi operasi sistem yang stabil.
(2) Menyerap fluktuasi tekanan sistem dan mengurangi lonjakan tekanan kecil, sehingga melindungi pipa dan komponen hidrolik serta meningkatkan masa pakai keduanya.
(3) Dalam perancangan mekanisme dampak hidrolik menggunakan teori variabel abstrak, pendekatan ini membantu mewujudkan gaya ekuivalen. Selama akumulator dirancang secara tepat, gaya ekuivalen yang akurat dapat diperoleh, sehingga memastikan sistem mencapai kinematika dan dinamika yang dibutuhkan.
Mengingat peran penting akumulator tekanan tinggi dalam sistem pemecah batu hidrolik—khususnya fungsi khususnya dalam menjamin pencapaian kinematika dan dinamika yang dibutuhkan oleh sistem—maka penetapan teori dan metode perancangan akumulator tekanan tinggi yang tepat merupakan hal yang sangat penting.
Volume pengeluaran efektif merupakan parameter kinerja penting akumulator serta dasar bagi perhitungan perancangan akumulator. Ketika pemecah batu hidrolik beroperasi dalam kondisi mantap (steady state), volume minyak maksimum yang disimpan dan dikeluarkan akumulator dalam satu siklus disebut volume pengeluaran efektif, dilambangkan dengan Δ V .
Volume pengeluaran efektif Δ V berkaitan dengan karakteristik kinematika. Ketika aliran pompa tetap dan struktur serta kinematika pemecah batu hidrolik tetap, maka energi benturan W H , frekuensi f H , dan volume debit efektif Δ V semuanya pasti tetap. Oleh karena itu, saat merancang akumulator, volume debit efektif sudah diketahui. Cara menghitung Δ V akan dijelaskan pada bab-bab selanjutnya.
Dasar perhitungan volume efektif akumulator V a adalah volume debit efektif riilnya Δ V . Ketika Δ V bekerja di dalam akumulator, hal ini pasti menyebabkan tekanan minyak sistem berubah, dan gaya ekuivalen F g harus dipertahankan. Oleh karena itu, metode perhitungan desain akumulator yang memenuhi persyaratan di atas harus dikaji. Diagram tekanan (gaya)–volume akumulator selama operasi ditunjukkan pada Gambar 3-2.
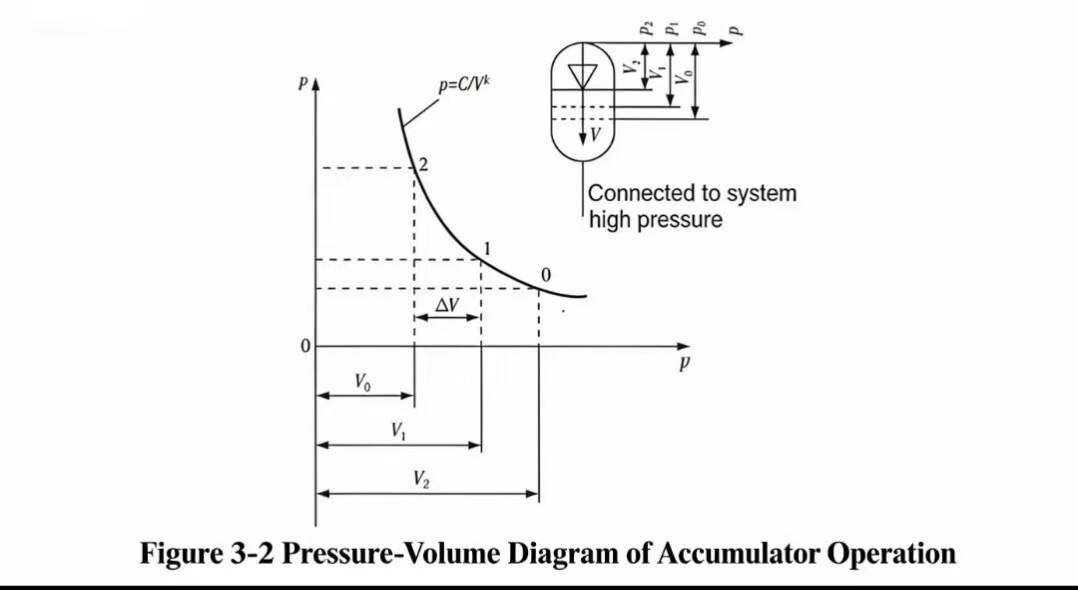
Meskipun frekuensi kerja pemecah batu hidrolik tidak terlalu tinggi, proses kompresi dan ekspansi nitrogen di dalamnya juga berlangsung cukup cepat, sehingga waktu yang tersedia untuk pertukaran panas dengan lingkungan sekitar tidak cukup; oleh karenanya proses ini dapat dianggap sebagai proses adiabatik. Dari persamaan keadaan gas:
p 1V k 1 = p 2V k 2 = p a V k a (3.12)
dimana: p a — tekanan pengisian, yaitu tekanan gas yang tersegel;
V a — volume pengisian, yaitu volume akumulator ketika piston berada pada titik tumbukan (umumnya volume kerja maksimum); V amax );
p 2— tekanan kerja maksimum;
V 2— volume yang sesuai dengan p 2(umumnya volume kerja minimum); V 2 menit );
p 1— tekanan kerja minimum;
V 1— volume yang sesuai dengan p 1, V 1 < V a .
Dalam Pers. (3.12), k = 1,4 adalah eksponen adiabatik. Jelas bahwa:
δ V = V 1 − V 2 (3.13)
Dari Pers. (3.12):
V 1 = V a (p a / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
Substitusi ke dalam Pers. (3.13) menghasilkan:
δ V = V a (p a / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
Dalam Pers. (3.16), misalkan p a / p 1 = a = 0,8 hingga 1; dan rasio tekanan kerja gas γ = p 2 / p 1, umumnya γ = 1,2 hingga 1,45, dipilih berdasarkan karakteristik kerja pemecah batu hidrolik. a ketika = 1, tekanan kerja minimum piston sama dengan tekanan pengisian ( p a = p 1); dalam kondisi ini V 1 = V a . Untuk mencegah membran akumulator menyentuh dasar pada tekanan kerja minimum pemecah batu hidrolik — yang akan memperpendek masa pakai — a harus diatur kurang dari 1.
Ada dua pertimbangan dalam memilih γ : ketika γ besar, karena akumulator bekerja dalam kondisi adiabatik, suhu meningkat tajam, yang dapat menyebabkan kerusakan dini pada membran akumulator atau bahkan membakarnya; namun peningkatan γ secara efektif dapat mengurangi volume efektif V a akumulator, yang sangat bermanfaat untuk mengurangi ukuran struktural akumulator. Perancang harus mempertimbangkan kelebihan dan kekurangan serta mengambil keputusan berdasarkan kondisi aplikasi; oleh karena itu:
δ V = V a a 1/K (1 − 1 / γ 1/K ) (3.17)
Dari Pers. (3.17), volume efektif akumulator dapat ditentukan:
V a = Δ Vγ 1/K \/ [ a 1/K (γ 1/K − 1)] (3.18)
Pers. (3.18) menunjukkan bahwa, dari volume debit efektif Δ V , volume pengisian yang sesuai dapat ditentukan, guna memastikan kinematika yang dirancang dan Δ V tercapai. Dalam praktiknya, volume debit efektif Δ V adalah minyak yang disuplai akumulator ke piston selama langkah kerja, untuk mengkompensasi pasokan pompa yang tidak mencukupi.
Untuk perhitungan desain volume debit efektif Δ V , silakan merujuk ke Bagian 7.5. Untuk memenuhi persyaratan desain optimal, bagi berbagai tujuan desain, perhitungan volume debit efektif Δ V berubah sesuai dengan yang dipilih α u (lihat Bagian 7.2.5 dan 7.27a).
Pada tahap ini, meskipun V a telah diperoleh dan dapat digunakan untuk mendesain parameter struktural akumulator, tugas perhitungan desain akumulator belum sepenuhnya selesai. Masalah paling kritis adalah bagaimana mengendalikan tekanan oli guna memastikan tercapainya gaya ekuivalen; dan hanya dengan mencapai gaya ekuivalen tersebut maka kinematika yang didesain dapat dijamin, yang pada gilirannya menjamin Δ V . Dengan kata lain, terdapat hubungan korespondensi antara Δ V dan F g .
Perlu ditekankan bahwa ketika V a merupakan nilai tetap, p 1, p 2, dan p a dapat memiliki banyak kombinasi, mewujudkan berbagai gaya ekuivalen, berbagai dinamika, dan berbagai kinematika — yaitu, berbagai Δ V nilai-nilai. Tugas berikutnya adalah, dengan mengambil nilai tetap V a , untuk menemukan kombinasi p 1, p 2, dan p a yang mampu mencapai gaya ekuivalen yang dibutuhkan F g dan Δ V . Karena ketika p a berubah, W H , f H , Δ V , p 1, dan p 2semuanya berubah secara bersamaan. Dengan kata lain, harus ada tekanan pengisian p a yang dapat menjamin tercapainya tekanan ekuivalen p g . Tentu saja, dasar untuk menemukan p a is p 1dan p 2, yaitu tekanan ekuivalen p g . Setelah hubungan antar parameter-parameter ini dipahami, metode untuk menentukan p 1, p 2, dan p a dari tekanan ekuivalen p g dapat dikaji.
Gambar 3-2 menggambarkan p –V diagram akumulator tekanan tinggi selama operasi. Berdasarkan diagram ini, serta dikombinasikan dengan prinsip gaya ekuivalen—yaitu usaha yang dilakukan oleh gaya variabel sama dengan usaha yang dilakukan oleh gaya ekuivalen—kita memperoleh:
p g δ V = ∫ V₂ V₁ p p V (3.19)
Dalam Pers. (3.19):
p = C / V k
Substitusikan ke dalam Pers. (3.19) dan integrasikan:
p g δ V = C ∫V₂ V₁ p V / V k = 1 / (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
Oleh karena itu:
p g δ V = 1 / (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
Menghapus V 1dan V 2dengan substitusi dan mensubstitusikan Pers. (3.17) menghasilkan:
p g = p 1\/ ( k − 1) · ( γ − γ 1/K ) / ( γ 1/K − 1) (3.22)
Setelah diatur ulang:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
Pada Pers. (3.23), p g adalah tekanan ekuivalen yang dikenakan pada permukaan piston yang menahan tekanan. Dengan mempertimbangkan kehilangan tekanan sistem, besaran ini harus dinyatakan sebagai tekanan pengenal sistem p g = p H / K . Itu p 1dan p 2yang diperoleh dengan cara ini akan lebih mendekati nilai-nilai aktual. Oleh karena itu:
p 1= ( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p a = ap 1 (3.26)
Dalam Pers. (3.24), koefisien tahanan yang memperhitungkan kehilangan tekanan sistem adalah K = 1,1 hingga 1,2.
Ketika akumulator tekanan tinggi pada pemecah batu hidrolik beroperasi pada parameter-parameter ini, hal tersebut menjamin tercapainya efek gerak gaya ekuivalen, terwujudnya kinematika yang dirancang, serta tersampaikannya energi bentur dan frekuensi bentur yang dibutuhkan. Dengan demikian, suatu permasalahan perhitungan kompleks disederhanakan dan permasalahan nonlinier dilinearisasi.
Berdasarkan penjelasan di atas, perangkat bentur hidrolik (bor batu hidrolik dan pemecah batu hidrolik) — sebagai suatu sistem nonlinier — diubah menjadi sistem linier. Dari sudut pandang teoretis, piston dapat bergerak sepanjang langkah S mengikuti pola apa pun, selama gerakannya dapat dikendalikan dan pada titik bentur mencapai kecepatan maksimum yang dibutuhkan v m — semua ini layak dilakukan. Untuk setiap pola gerak piston, harus ada pola variasi gaya yang sesuai; keduanya saling terkait sebagai sebab dan akibat. Dengan kata lain, apa pun pola gerak yang dimiliki piston, pola variasi gaya yang sesuai harus diterapkan padanya — gaya merupakan sebab, sedangkan gerak merupakan akibat.
Tentu saja, setelah merancang pola gerak optimal, pola variasi gaya yang sesuai juga dapat ditentukan, sehingga muncul dua topik teoretis untuk penelitian pemecah batu hidrolik: kinematika dan dinamika pemecah batu hidrolik.

Selamat datang di HOVOO, pabrik segel Cina. Produksi segel PU, Karet dan PTFE. Segel tersebut mencakup O-ring, segel piston, segel batang, Gray ring dan segel gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}