33-99 ნომ. Mufu E გამზ Gaussian რაიონი, ნანჯინგი, ჩინეთი [email protected] | [email protected]
33-99 ნომ. Mufu E გამზ Gaussian რაიონი, ნანჯინგი, ჩინეთი [email protected] | [email protected]

Ჰიდრავლიკური ცილინდრი ჰიდრავლიკურ ენერგიას წრფივ ან სწორხაზოვან მექანიკურ მოძრაობაში გარდაიქმნება. მოძრავი ტვირთის დაკავშირების შემდეგ ის მუშაობას ასრულებს.
Როგორც ადრე მოცემული თავებში აღინიშნა, ჰიდრავლიკური ცილინდრი ძირთადად შედგება სხეულისგან, ორი დახურული ბოლოს ფარდისგან, პისტონისგან, პისტონის ძელისგან და შესასვლელი და გამოსასვლელი პორტებისგან. თითოეულ ბოლოს აქვს ერთი პორტი — ერთი ზეთის შესასვლელად, მეორე ზეთის გამოსასვლელად.
ნახაზი 6-1. სტანდარტული ორმხრივი მოქმედების ჰიდრავლიკური ცილინდრი. ზეთი შედის მარცხენა პორტიდან და გადაადგილებს ძელს; ზეთის გამოტანა მარჯვენა პორტიდან ძელს უკან აბრუნებს.
Ცილინდრის სრულ სვლაში ჰიდრავლიკური ენერგია მოქმედებს მოძრავ პისტონზე. ამ ჰიდრავლიკური ენერგიით წარმოქმნილი წნევა არ აღემატება ტვირთის მიერ შექმნილ წინააღმდეგობას. ცნობილი განზომილებების მქონე ცილინდრის შემთხვევაში ჩვენ უნდა ვიცოდეთ, რომელი მუშაობის წნევა იძლევა კონკრეტულ გამოსავალ ძალას. ეს შეიძლება განისაზღვროს (ხახუნის გარეშე) შემდეგი ფორმულით:
Წნევა = ძალა ÷ ფართობი
Ამ ფორმულის გამოყენების დროს ან მოცემულია ფართობი და წნევა გამოსავალ ძალის გასაგებად, ან ცნობილია ფართობი და გამოსავალ ძალა წნევის გასაგებად. პრაქტიკაში ჩვენ ჩვეულებრივ ვიცით ცილინდრის შიგა დიამეტრი და უნდა გამოვთვალოთ პისტონის ფართობი — მაგრამ წრეწირის ფართობის გამოთვლა ისევე მარტივია, როგორც კვადრატის ფართობის გამოთვლა.
Წრეწირის ფართობი მოახლოებით უდრებს იმ კვადრატის ფართობის 78,54%-ს, რომლის გვერდის სიგრძე უდრებს წრეწირის დიამეტრს. უფრო სწორად:
Წრეწირის ფართობი = დიამეტრი² × 0,7854
Კიდევა ერთი ხშირად გამოყენებადი ფორმულა:
Წრეწირის ფართობი = π × D² ÷ 4

Ნაკრები 6-2 წრეწირის ფართობი = D² × 0.7854. ეს მარტივი ფორმულა ხშირად გამოიყენება ჰიდრავლიკური ცილინდრების გამოთვლებში.
Ჰიდრავლიკური ენერგიის მოქმედების მანძილი განსაზღვრავს შესრულებული მუშაობის რაოდენობას — ეს მანძილი არის ცილინდრის სტროკი. როგორც ადრე აღინიშნა, ჰიდრავლიკური წნევის გამოყენება ძალის გაძლიერების საშუალებად ჩანს, რომ არ ითხოვს რაიმე საფასურს. ზოგიერთ კონკრეტულ შემთხვევაში — როდესაც სისტემა სტატიკურია — პატარა ძალა შეიძლება გამოიწვიოს ძალიან დიდი ძალა გარეგნულად რაიმე საფასურის გარეშე. მაგრამ თუ ეს გაძლიერებული ძალა ასევე იწვევს მოძრაობას, რაღაც იკარგება: მანძილი.
Ყველა ჰიდრავლიკურ ცილინდრს აქვს მოცულობა (განტავისება), რომელიც ტოლია მისი სტროკის (დუიმებში) გამრავლებული მისი პისტონის ფართობით (დუიმ²-ში), რაც იძლევა მოცულობას დუიმ³ (სმ³)-ში.
Ცილინდრის მოცულობა = პისტონის ფართობი × სტროკი
(დუიმ³) = (დუიმ²) × (დუიმი) ან (სმ³) = (სმ²) × (სმ)
Მაგალითად: ზედა პისტონს უნდა გადაადგილდეს 2 დუйმი (5,08 სმ), რათა ქვედა ცილინდრის პისტონი გადაადგილდეს 1 დუйმი (2,54 სმ). ორივე პისტონი ასრულებს ერთი და იგივე მუშაობას. ზედა პისტონი გადაადგილებს 20 კუბ. დუйმი (327,8 კუბ. სმ) სითხეს — ხოლო ქვედა ცილინდრის პისტონი გადაადგილება იმავე 20 კუბ. დუйმით (327,8 კუბ. სმ) სითხით.
Ჰიდრავლიკური ცილინდრის პისტონის ძელის სიჩქარე დამოკიდებულია იმაზე, თუ რამდენად სწრაფად ავსებს სითხე პისტონის უკან მდებარე კომპარტმენტს. პისტონის ძელის სიჩქარის ფორმულები:
Ძელის სიჩქარე (დუйმ/წთ) = სითხის სიჩქარე (გალონ/წთ) × 231 ÷ პისტონის ფართობი (დუйმ²)
Ძელის სიჩქარე (მ/წმ) = სითხის სიჩქარე (ლ/წთ) × 0,1667 ÷ პისტონის ფართობი (სმ²)

Ჰიდრავლიკური მოტორი არის აქტუატორი, რომელიც ჰიდრავლიკურ ენერგიას აქცევს ბრუნვით მექანიკურ ენერგიად. ეს ბრუნვითი ენერგია გადაეცემა ტვირთს მართვის ღერძის მეშვეობით.
Ყველა ჰიდრავლიკური მოტორი ძირითადად შედგება სახურავისგან, რომელსაც აქვს შესასვლელი და გამოსასვლელი პორტები, და ბრუნვითი აგრეგატისგან, რომელიც დაკავშირებულია მართვის ღერძთან.
Ნაჩვენები მაგალითი არის ფირფიტიანი ჰიდრავლიკური ძრავა. ბრუნვადი შეკრება შედგება როტორისგან და ფირფიტებისგან, რომლებიც თავისუფლად შეიძლება გადაადგილდნენ როტორის ღრძილებში შესვლისა და გამოსვლის მიმართულებით. ბრუნვადი შეკრება ეკცენტრულად არის დამაგრებული კორპუსში; საწყისი ღერძი დაკავშირებულია ტვირთს. როდესაც წნევის ქვეშ მყოფი ზეთი შედის შესასვლელ კომპარტიმენტში, ჰიდრავლიკური ენერგია მოქმედებს შესასვლელ კომპარტიმენტში არსებული ფირფიტის გამოხატულ ზედაპირზე. რადგან ზეთის წნევის ქვეშ მყოფი ზედა ფირფიტის ფართობი უფრო დიდია, როტორზე მოქმედება არაბალანსირებული ძალა — როტორი ბრუნავს.
Როდესაც ზეთი მიაღწევს გამოსასვლელ კომპარტიმენტს მცირდება მოცულობით, ის გამოიყოფა.
Შენიშვნა: ამ ტიპის ძრავის ნორმალურად მუშაობის წინაპირობაა ფირფიტების გაშლა და მათი სანდო დაკეცვა კორპუსთან. ჰიდრავლიკური პომპისგან განსხვავებით, ფირფიტები ცენტრიფუგული ძალით არ იძულება გარეთ გამოსვლას — ძრავის ფირფიტების გაშლის მეთოდი განხილვის საგანი იქნება შემდეგ თავში.
Ნახაზი 6-6 ფართობის მოტორის მუშაობა. წნევის ქვეშ მყოფი ზეთი მოქმედებს ფართობებზე. რადგან ზედა ფართობის წნევის ქვეშ მყოფი ზედაპირის ფართობი მეტია ქვედა ფართობის წნევის ქვეშ მყოფი ზედაპირის ფართობზე, ამიტომ წარმოიქმნება ნეტო ძალა, რომელიც ბრუნავს როტორს.
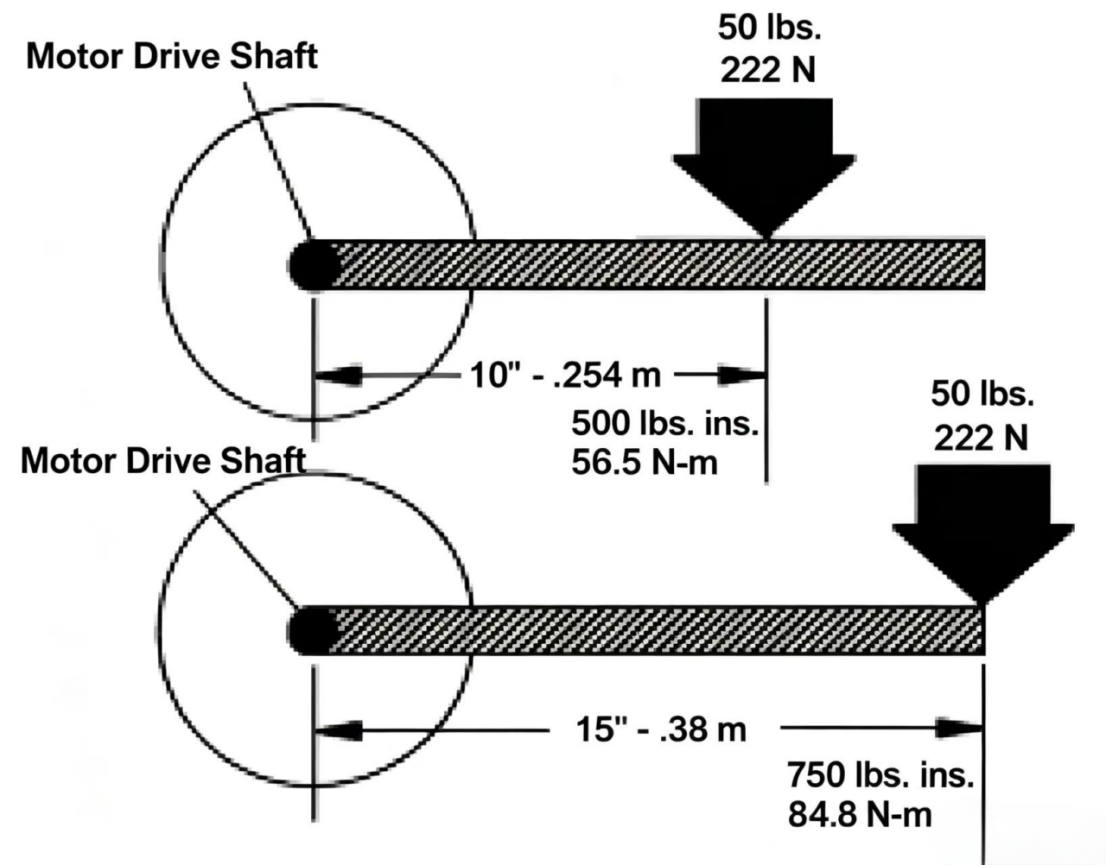
Რეაქციის მომენტი — ეს არის ბრუნვის ან ტრიალების ძალა. რეაქციის მომენტი — ეს არის ძალა, რომელიც მოქმედებს საკუთარი ღერძის ცენტრალური ხაზიდან რაღაც მანძილზე. რეაქციის მომენტის ერთეულია ფუნტ-ინჩი (lb.in.) (ან ნიუტონ-მეტრი, Nm).
Რეაქციის მომენტი გვაძლევს ინფორმაციას ძალის მდებარეობის შესახებ ჰიდრავლიკური მოტორის ღერძის ცენტრალური ხაზის მიმართ. რეაქციის მომენტის ფორმულა არის:
Რეაქციის მომენტი = ძალა × მანძილი ღერძის ცენტრიდან
(lb.in.) = (lb) × (in.) ან (Nm) = (N) × (m)
Მაგალითი ნახაზიდან: 50 ფუნტი (222 ნ) ძალა მოქმედებს ძრავის ღერძზე დაკავშირებულ კრანკზე. ღერძის ცენტრსა და ძალას შორის მანძილი არის 10 დუйმი (0.254 მ). ღერძზე წარმოქმნილი ბრუნვის მომენტი არის 500 დუйმ-ფუნტი (56.5 ნმ). თუ იგივე 50 ფუნტი (222 ნ) მოქმედებს 15 დუйმიან (0.38 მ) კრანკის ბარძიმზე, ღერძზე ბრუნვის მომენტი იქნება 750 დუйმ-ფუნტი (84.6 ნმ). რაც უფრო მეტი მანძილია ძალის მოქმედების წერტილსა და ღერძის ცენტრს შორის, მით უფრო დიდი იქნება ბრუნვის მომენტი. შეამჩნიეთ, რომ ბრუნვის მომენტი არ ითავსებს რაიმე მოძრაობას.
Ძრავის მარეგულირებლის ღერძზე დაკავშირებული ტვირთი წარმოქმნის ბრუნვის მომენტს ზემოხსენებული სახით. ჰიდრავლიკური ძრავის შემთხვევაში ეს არის წინააღმდეგობა — მის გადალაგება სჭირდება ჰიდრავლიკური წნევის მოქმედებას ძრავის ბრუნვად აგრეგატზე.
Ბრუნვის მომენტი (დუйმ-ფუნტი) = psi × ძრავის განტვირთვა (ინ³) ÷ (2 × π)
Ბრუნვის მომენტი (ნმ) = bar × ძრავის განტვირთვა (სმ³) ÷ (20 × π)
Ჰიდრავლიკური ძრავის ღერძის სიჩქარე განისაზღვრება სითხის შეყვანის სიჩქარით. ფორმულა არის:
Ძრავის სიჩქარე (აბრუნება/წუთში) = სითხის სიჩქარე (გალონი/წუთში) × 231 ÷ ძრავის განტვირთვა (ინ³/აბრუნება)
Ძრავის ბრუნვის სიჩქარე (აბრუნება/წუთში) = სითხის გატარების სიჩქარე (ლიტრი/წუთში) × 1000 ÷ ძრავის ცილინდრის მოცულობა (მლ/აბრუნება)
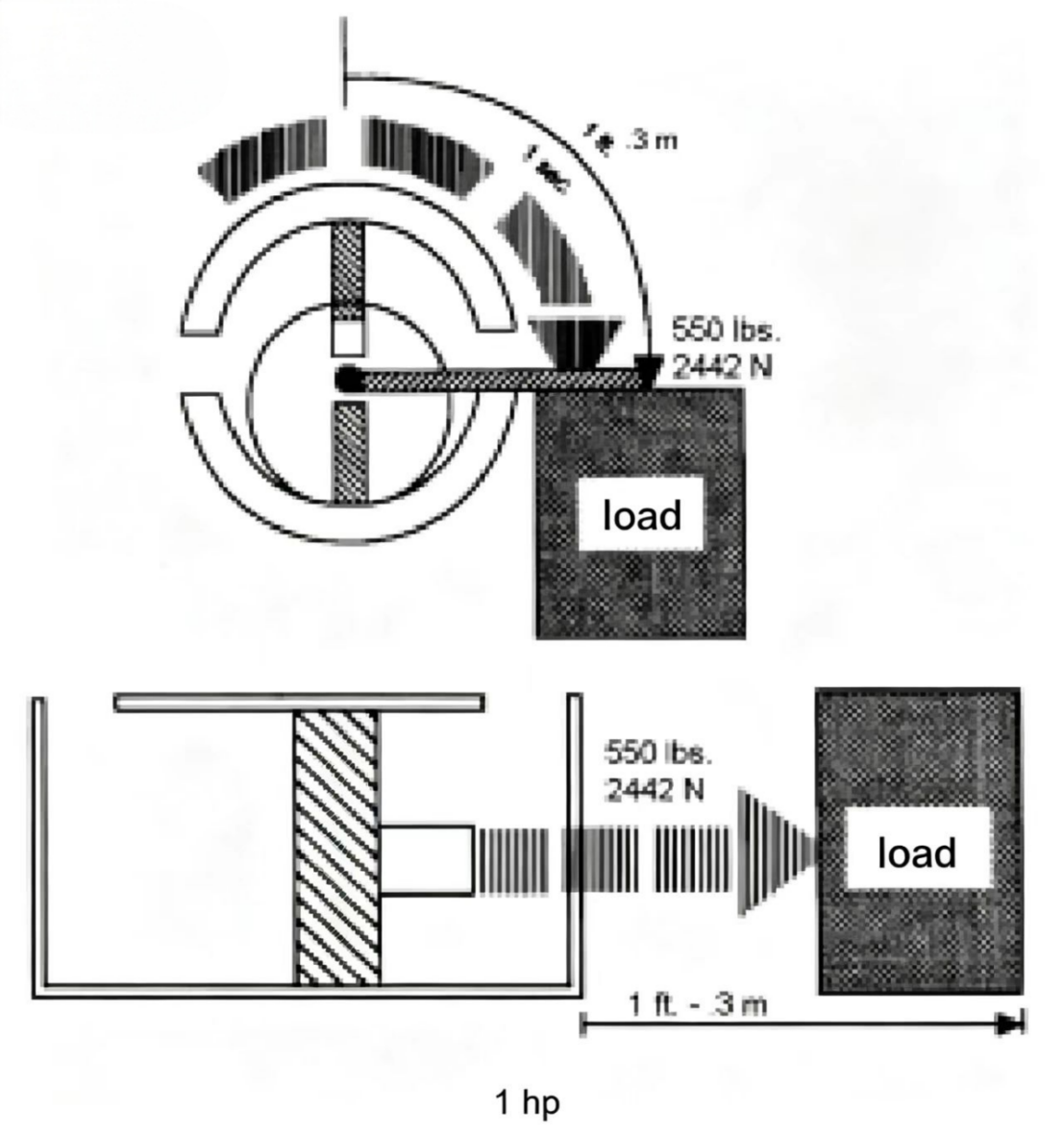
Ადრე განხილულ თავებში ვისწავლეთ, რომ სიმძლავრე არის სამუშაოს შესრულების სიჩქარე, ანურად: ცხენის ძალა (hp) = ფუტ-ფუნტი/დრო ან ვატი (W) = ჯოული/დრო.
Ასევე ვიცით, რომ ცხენის ძალა (hp) ან ვატი (W) არის სიმძლავრის ერთეული. თუ ჰიდრავლიკური ცილინდრი ან ჰიდრავლიკური ძრავი 550 ფუნტი (2 442 ნიუტონი) მეхანიკური ძალით აძრავს ტვირთს და იგი 1 ფუტით (0,30 მეტრით) გადაადგილდება ერთ წამში, მაშინ გამოყენებული სიმძლავრე იქნება 1 ცხენის ძალა (746 ვატი). თუ იგივე სამუშაო (550 ფუტ-ფუნტი / 746 ჯოული) შესრულდება ნახევარ წამში, მუშაობის სიჩქარე ორმაგდება და სიმძლავრე იქნება 2 ცხენის ძალა (1 490 ვატი).
Ცილინდრის ან მოტორის მიერ ტვირთზე გადაცემული მექანიკური სიმძლავრე ტოლია ცილინდრის ან მოტორის მიერ მოთხოვნილი ჰიდრავლიკური სიმძლავრის. ჰიდრავლიკური სისტემის შემთხვევაში, რომელიც 550 ფუტ-ფუნტი (746 ჯ) წამში ასრულებს მუშაობას, მისი ჰიდრავლიკური სიმძლავრე არის 1 ცხენძალი (746 ვტ). თუმცა, მექანიკური სიმძლავრის ფორმულაში «ფუტი (მ)» და «ფუნტი (ნ)» ჩანაცვლდება ჰიდრავლიკური ტერმინებით — «psi (ბარი)» და «gpm (ლ/წთ)». ჰიდრავლიკური სიმძლავრის გამოთვლებში გამოიყენება გარდაქმნის კოეფიციენტი, რომელიც გამოსახავს კავშირს gpm, psi, ფუტი და ფუნტი (ან Lpm, ბარი, მ და ნ) შორის.
Ჰიდრავლიკური ცილინდრის ან მთლიანი ჰიდრავლიკური სისტემის სიმძლავრის გამოსათვლელად:
ცხენძალი = gpm × psi × 0,000583
Ვტ = ცხენძალი × 746
Ვტ = (5/3) × Lpm × ბარი
Ჰიდრავლიკური მოტორის გამომავალი სიმძლავრის გამოსათვლელად:
ცხენძალი = ბრუნვის სიხშირე (rpm) × ბრუნვის მომენტი (ინჩ-ფუნტი) / 63 025
კვტ = ბრუნვის სიხშირე (rpm) × ბრუნვის მომენტი (ნ·მ) / 9 543
Ამდენამდე ჩვენ განვიხილეთ ჰიდრავლიკური ძრავები ბრუნვითი გამოტანით და ჰიდრავლიკური ცილინდრები წრფივი გამოტანით. ახლა ჩვენ განვიხილავთ აქტუატორის კიდევა ერთ ტიპს, რომელიც შეზღუდული კუთხით ბრუნავს. ამ ტიპს ეწოდება ოსცილირებადი ცილინდრი ან ოსცილირებადი ძრავა. მისი სტრუქტურა კომპაქტური, მარტივი და ეფექტურია — ის აწარმოებს მაღალ ტრაქციას და მოითხოვს მხოლოდ პატარა დაყენების სივრცეს, ხოლო დაყენება მარტივია.
Ოსცილირებადი აქტუატორები გამოიყენება მანქანის ინსტრუმენტების ინდექსაციაში, გამოხრის ოპერაციებში, მძიმე საგნების აწევასა და ბრუნვაში, გადაბრუნებაში, პოზიციონირებაში, მექანიკური დამუშავების მიმაგრებებში, ზღვის მართვის სისტემებში, კლაპანების მართვაში და ა.შ.
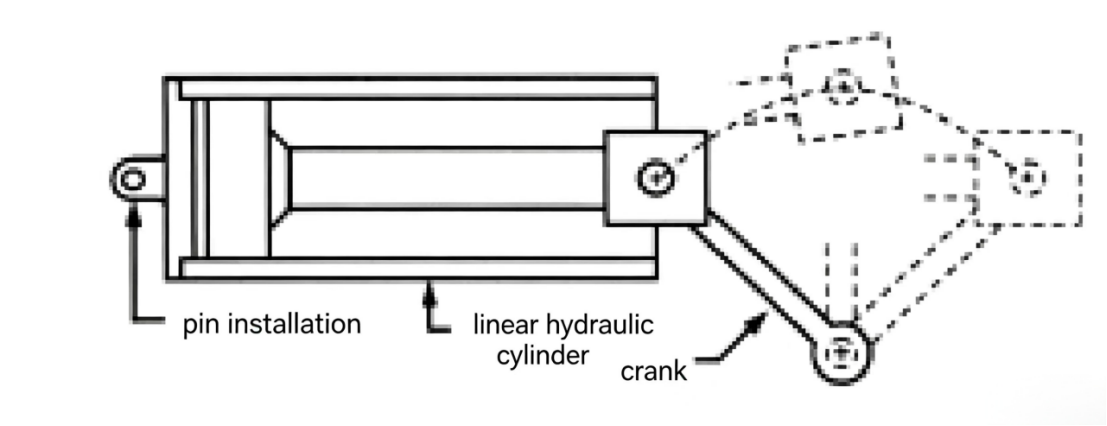
Ოსცილირებადი ცილინდრების ბევრი ტიპი არსებობს. ყველაზე მარტივი არის წრფივი ჰიდრავლიკური ცილინდრით მოძრავი ოსცილირებადი მექანიზმი, სადაც ცილინდრის სხეულის ბოლო მიმაგრებულია ღეროზე, ხოლო პისტონის ძელაკი დაკავშირებულია კრანკთან, რომელიც ბრუნავს საკონტროლო ღეროს. ეს ოსცილირებადი ცილინდრი შეიძლება მართვას 4-გზიანი მიმართულების ვალვით, ხოლო სტროკის თითოეულ ბოლოში მოთავსებულია ლიმიტის გადამრთველები.
Როგორც ყველა მეхანიკური მოწყობილობა, ეს წრფივი ცილინდრებზე დაფუძნებული ოსცილირებადი აქტუატორი გარკვეული ძირითადი მახასიათებლებით გამოირჩევა, მათ შორის — ის, რომ მისგან შესაძლებელია სტანდარტული, მზად არსებული ნაკეთობების გამოყენებით შეკრება, რაც დიზაინერებს მოსახერხებლობას აძლევს და საჭიროების შემთხვევაში ადვილად მისაღები სარეზერვო ნაკეთობების გამო ხარჯებს დაბალ დონეზე მოაქცევს.
Თუმცა, ამ ტიპის ოსცილირებადი აქტუატორს ასევე აქვს სასურველი არ არსებული მახასიათებლები: პისტონის ძელაკი დაცული არ არის და პირდაპირ ეხება გარშემომყოფ გარემოს, განსაკუთრებით მაშინ, როდესაც კრანკის მექანიზმი ჩვეულებრივ არ არის დახურული, რაც საფრთხის შექმნას იწვევს. ამასთანავე, მართვის ძელაკი ჩვეულებრივ დიდი გვერდითი ტვირთის ქვეშ მოქმედებს, რაც ადრეულ მარცხს, ჭარბ აბრაზიულ wear-ს და დაკეცვას იწვევს.
Ამ კონკრეტული ტიპის ოსცილირებადი აქტუატორის შემთხვევაში ჰიდრავლიკური ცილინდრი უნდა იყოს თავისუფალი სვლის გასაკეთებლად, ამიტომ უნდა გამოყენებულ იქნას მოქნილი ჰოსების შეერთებები, ხოლო ცილინდრის სვლის მთელ გასასვლელში გამომავალი ტრაქცია მუდმივი არ არის.
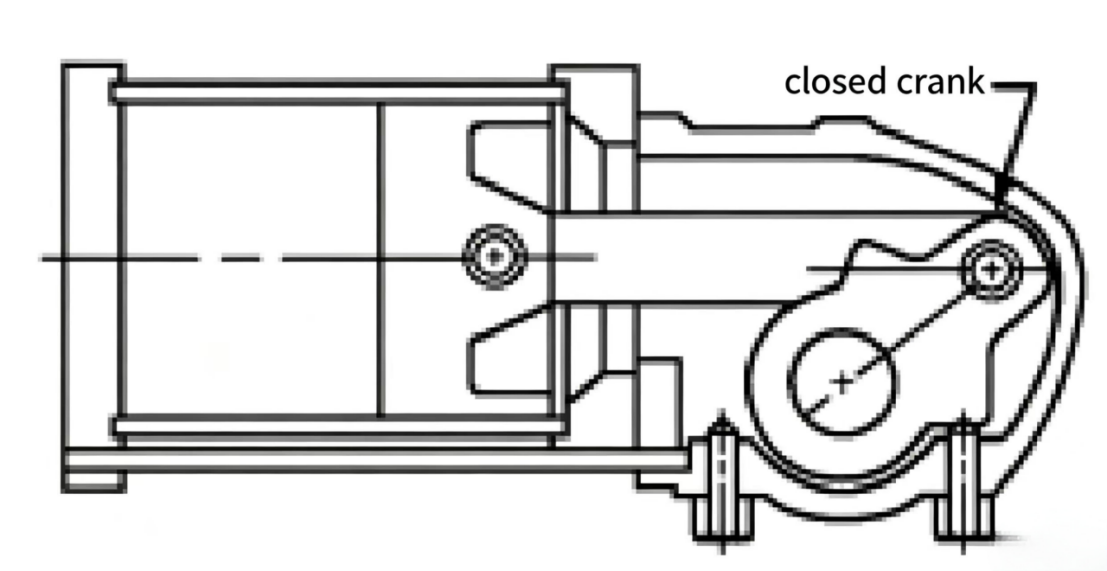
Ჩაკეტილი ოსცილირებადი ცილინდრი ძალზე მსგავსია ზემოთ აღნიშნული წრფივი ცილინდრებზე დაფუძნებული ოსცილირებადი მეхანიზმის. ჩაკეტილი ცილინდრი პისტონის ძელაკსა და კრანკს მომხმარებლის დაცვის საფარით აფარებს. მექანიზმის საჭარბო ღერძი ჩვეულებრივ დამატებითი საყრდენითაა აღჭურვილი, რათა თავიდან აიცილოს ძლიერი გვერდითი ტვირთები. ამ ტიპის ცილინდრები შეიძლება დაიმუშაოს ელექტრომაგნიტური ვალვებით, ზღვარის გადამრთველებით ან სვლის გადამრთველებით. სვლის დიაპაზონი ჩვეულებრივ შეიძლება დაირეგულირდეს 85°–დან 100°-მდე.
Სხვა ტიპია სპირალური დაბრუნების ოსცილირებადი ცილინდრი, რომელიც ჰიდრავლიკური ცილინდრის და დაბრუნების სპირალის გამოყენებით საჭარბო ღერძს საწყის მდებარეობაში აბრუნებს. სპირალური დაბრუნების ოსცილირებადი ცილინდრები შეძლებენ მოცემული ბრუნვის მომენტის გამოტანას 5 000 in·lb (565 N·m) მდე.

Ყველაზე გავრცელებული ოსცილირებადი ცილინდრი არის ძაბურგულ-პინიონის ტიპი. ეს ტიპი შეძლებს მუდმივი გამომავალი ტორქის შენარჩუნებას ორივე მიმართულებით სრული ბრუნვის განმავლობაში. ამ კონფიგურაციაში ჰიდრავლიკური წნევა მოქმედებს პისტონზე, რომელიც აძავებს პისტონთან დაკავშირებულ ძაბურგულს და ამ გზით აძრავს პინიონის ბორბალს, რათა გამოიწვიოს საღერძოს ბრუნვა. სტანდარტული ძაბურგულ-პინიონის ცილინდრების ბრუნვის სვლები არის 90°, 180°, 360° ან კიდევე მეტი. ძაბურგულ-პინიონის ცილინდრების გამომავალი ტორქი შეიძლება მიაღწიოს 52 000 000 in·lb-ს (5 876 000 N·m).

Ასევე ხელმისაწვდომია ვანის ოსცილირებადი მოტორი. ეს ტიპი შეიძლება იყოს ერთვანიანი ან მრავალვანიანი. ერთვანიანი მოტორი შეძლებს 280°-იან ბრუნვას; ორვანიანი მოტორი შეძლებს 200°-იან ბრუნვას. ორვანიანი მოტორის გამომავალი ტორქი ერთვანიანის ტორქის ორჯერ მეტია. ამ ტიპის ოსცილირებადი მოტორი შეძლებს გამომავალი ტორქის მიღწევას 500 000 in·lb-მდე (N·m).

Არსებობს სხვა ტიპის ოსცილირებადი ძრავა, რომელიც ტორქის გენერირებას ახდენს სპირალური სპლაინის მექანიზმის გამოყენებით. სპლაინის სიგრძისა და პიტჩის ცვლილებები საშუალებას აძლევს ბრუნვის სტროკის ფართო დიაპაზონში ცვლილებას. ამ ტიპის ოსცილირებადი ძრავა შეიცავს ერთ სპირალურ სპლაინის ღეროს, რომელზეც შეტანილია შიგნიდან სპლაინირებული პისტონის გილაკი — პისტონის გილაკის ბრუნვა შეზღუდულია მიმართველი ძაფებით. როდესაც პისტონის გილაკი მოძრაობს ცილინდრის შიგნით, ის აძრავს სპლაინის ღეროს ბრუნვის მიმართულებით. სტანდარტული ბრუნვის სტროკებია 90°, 180°, 270° და 360°, ხოლო გამომავალი ტორქი შეიძლება მიაღწიოს 1 000 000 in.lbs-ს (13 000 Nm)-ს.
Ჯაჭნისა და სპროკეტის ოსცილირებადი ძრავები იყენებენ პისტონებს, ჯაჭნებს და სპროკეტებს ღეროს მოძრავების მიზნით. ეს აქტიუატორი ჩვეულებრივ შეიცავს ერთ დიდ პისტონს (როგორც მძრავ მოწყობილობას) ჯაჭნის გასაძრავებლად და პატარა პისტონს სითხის დაბრუნების ჯაჭნის მარშრუტიდან გაჟონვის თავიდან ასაცილებლად. გამომავალი ტორქი შეიძლება მიაღწიოს დაახლოებით 23 000 in.lbs-ს (2 599 Nm)-ს, ხოლო მძრავი ღეროს ბრუნვა შეიძლება მიაღწიოს ხუთ სრულ ბრუნს ანუ 1 800°-ს.
Კონკრეტული გამოყენებისთვის ყველაზე შესაფერებელი ოსცილირებადი ცილინდრის შერჩევისთვის საჭიროებულია ტორქის, სიჩქარის და მოქმედების მეთოდის შესატყოლებლად მორგება. ფაქტიური ოსცილირებადი ძრავის შერჩევა აღწერილი იქნება სხვა თავში, სადაც განსაკუთრებით განიხილება ერთმხრივი თუ ორმხრივი მოქმედების არჩევა, დახურული კონტურის პოზიციონირების გამოყენება, ამორტიზაციის საჭიროება და ა.შ. ასევე განიხილება მოქმედების სიხშირე ან ციკლის პერიოდი.
Გამააქტივებლის სიჩქარე არის სითხის სიჩქარის (გალონი/წუთში (ლ/წთ)) ფუნქცია
Ჰიდრავლიკური ცილინდრის პისტონის ძრავის ხელის წრფივი სიჩქარე დამოკიდებულია იმ სიჩქარეზე, რომლითაც სასუნთქი სითხეს აბანებს ცილინდრის პისტონის კომპარტმენტში (გალონი/წუთში (ლ/წთ)). ჰიდრავლიკური ძრავის მოძრავი ღერძის ბრუნვის სიჩქარე დამოკიდებულია ჰიდრავლიკურ ძრავაში შეყვანილი სითხის სიჩქარეზე (გალონი/წუთში (ლ/წთ)).
Გამააქტივებლის გამომავალი ძალა არის წნევის (ფუტი/კვადრატული ინჩი (ბარ)) ფუნქცია
Ცილინდრის გამომავალი ძალა გამოისახება psi (bar)-ში — მოძრავი ძრავის გამომავალი ძალა განისაზღვრება ძრავის ბრუნვადი ასემბლების გამოყენებულ ფართობზე მოქმედი წნევით. აქტუატორის მიერ წარმოებული სიმძლავრე არის აქტუატორის სიჩქარისა და გამომავალი ძალის ნამრავლი.
Ცილინდრების შემთხვევაში გამომავალი ძალა გამოისახება psi-ში, ხოლო პისტონის ძრავის სიჩქარე — gpm-ში. მუდმივი 0,000583 აღწერს psi, gpm და სიმძლავრეს შორის კავშირს. ძრავების შემთხვევაში გამომავალი ძალა გამოისახება მომენტში, ხოლო ძრავის მუშაობის სიჩქარე — rpm-ში. მუდმივი 63 025 აღწერს rpm, მომენტსა და სიმძლავრეს შორის კავშირს.

gaussian HOVOO, კიტაიური სიმოქმედი ფაბრიკა. PU, რ椽ubber და PTFE სიმოქმედის წარმოება. სიმოქმედები მოიცავს O-გარე, პისტონის სიმოქმედებს, რდომის სიმოქმედებს, Gray გარე და გაზის სიმოქმედებს.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}