33-99 ნომ. Mufu E გამზ Gaussian რაიონი, ნანჯინგი, ჩინეთი [email protected] | [email protected]
33-99 ნომ. Mufu E გამზ Gaussian რაიონი, ნანჯინგი, ჩინეთი [email protected] | [email protected]

Ჰიდრავლიკური კონტროლის ვალვა არის მექანიკური კომპონენტი, რომელიც შედგება ვალვის სხელისგან, რომელსაც შიგნით აქვს სითხის გამტარი ან დაბლოკვის შესაძლებლობას მიმართული გასასვლელები და შიგნით მოძრავი ნაკეთობები. სახელურის გასასვლელები გამოიყენება ზეთის გადასატანად. შიგნით მოძრავი ნაკეთობების მოქმედება აკონტროლებს სისტემის მაქსიმალურ წნევას, სითხის მიმართულებას და სიჩქარეს.
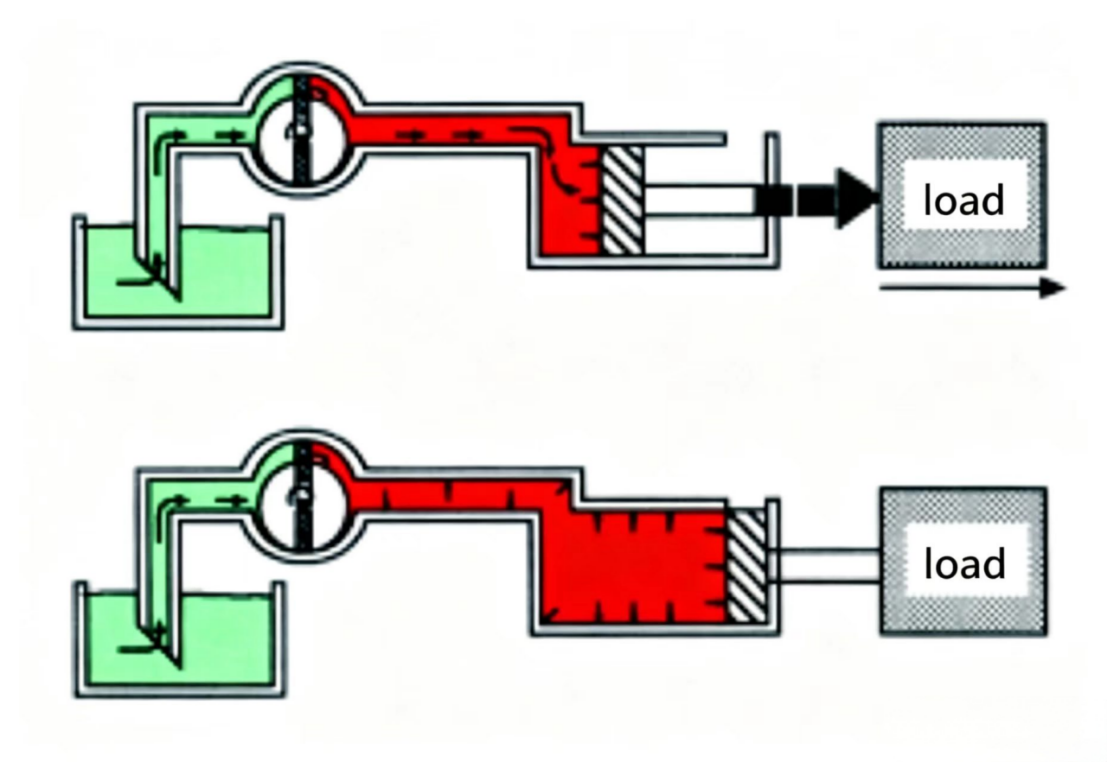
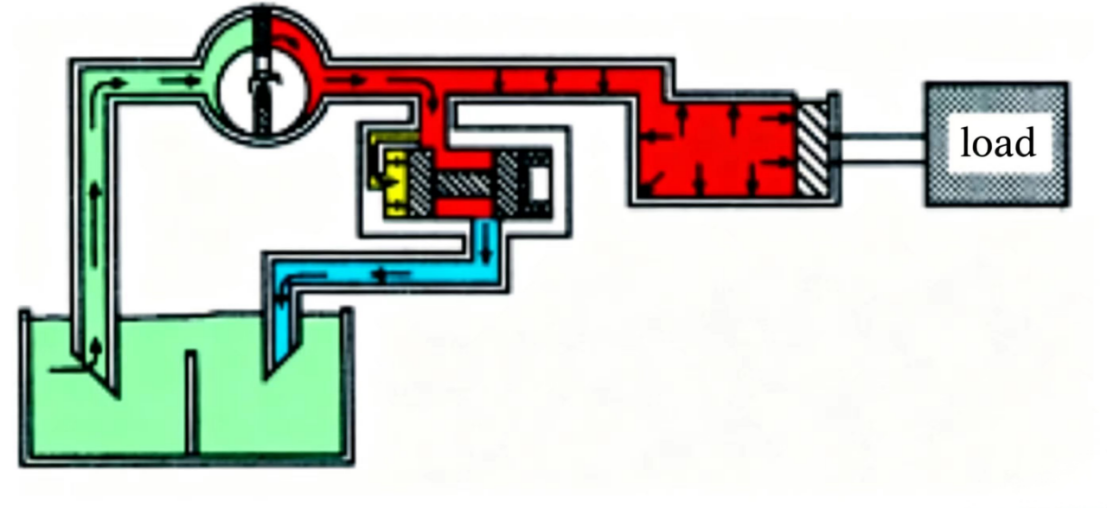
Ჰიდრავლიკური ენერგია შეიძლება გამოყენებულ იქოს ჰიდრავლიკურ ცილინდრზე. როდესაც შედეგი წარმატებული სამუშაო აღმოჩნდება, ცილინდრის სრულად გაშლის შემდეგ სამუშაო დასრულდება. დადებითი განტავისების პომპა განაგრძობს ენერგიის მიღებას თავისი ძრავიდან. ეს იწვევს ზეთში წნევის მატებას. (შენიშვნა: სისტემაში მინიმალური წინააღმდეგობა განსაზღვრავს გამოყენებულ ჰიდრავლიკურ წნევას.) რამდენად ცილინდრი უფრო მეტად გაშლება, მით უფრო მეტად სისტემის ფიზიკური სიმტკიცე ხდება მინიმალური წინააღმდეგობა.
Პომპა მეტი წნევის დამატებით ამოიგებს ამ წინააღმდეგობას. ადამიანები სისტემის წნევის უსაფრთხო დიაპაზონში შესანარჩუნებლად იყენებენ წნევის რეგულირების ვალვებს.
Წნევის რეგულირების ვალვის შიგნით მოძრავი ნაკეთობები მოქმედებენ წნევის საფუძველზე. როდესაც სისტემის წნევა აღწევს გარკვეულ მოცემულ მნიშვნელობას, შიგნით მოძრავი ნაკეთობები აკავშირებენ ან ბლოკავენ ვალვის სხეულში ერთ-ერთ გასავლელს, რის გამოც ზეთი იწყებს ან შეწყავებს გასვლას ამ გასავლელში.
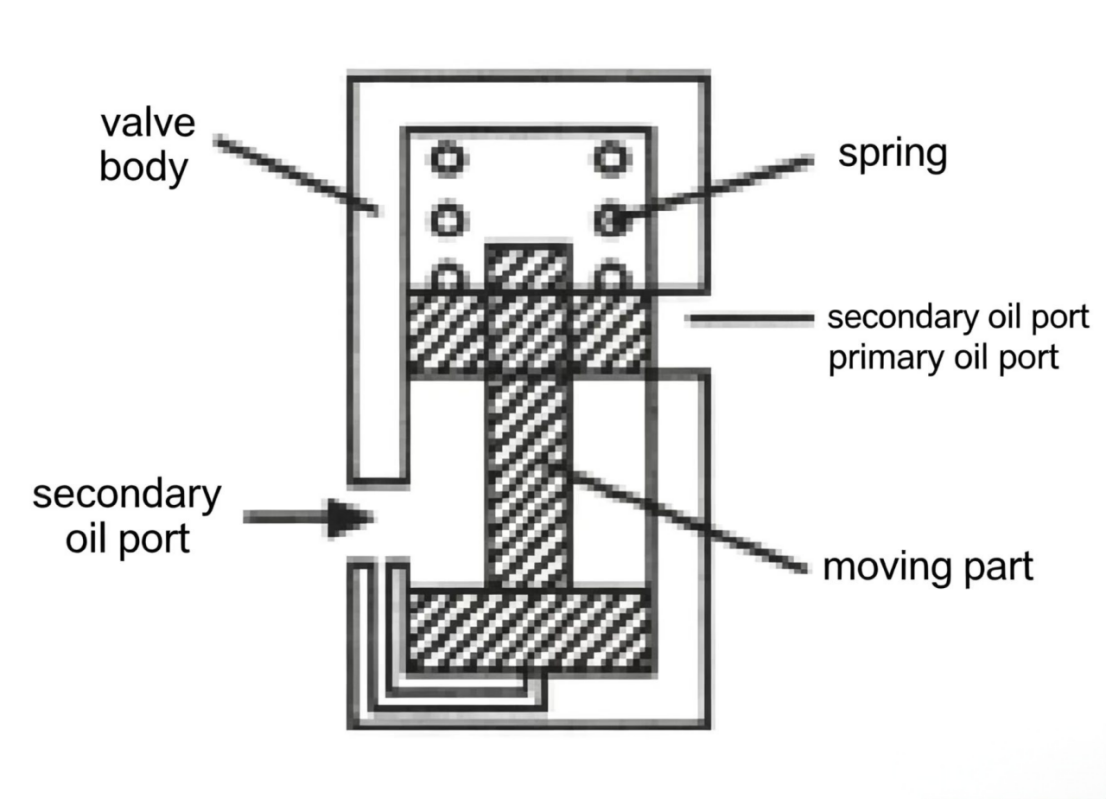
Წნევის რეგულირების ვალვა შედგება ვალვის სხელისგან, რომელსაც აქვს პირველადი და მეორეხარისხოვანი გასასვლელები და შიგა მოძრავი ნაკეთობები (სპული). გასასვლელებთან გარე შეერთებებს პირველადი და მეორეხარისხოვანი პორტები ეწოდება.
Წნევის რეგულირების ვალვის შიგა მოძრავი ნაკეთობა ჩვეულებრივ სპულის ტიპის მოწყობილობაა. როდესაც სპული ერთ-ერთ ბოლო პოზიციაშია, შიგა გასასვლელი დაკავშირებულია და ნაკადი შეიძლება გაივლოს. როდესაც ის მეორე ბოლო პოზიციაშია, შიგა გასასვლელი დაბლოკილია და ნაკადი ვალვის გასწვრივ შეწყდება.
Წნევის რეგულირების ვალვაში სპული სპრინგით არის გადახრილი ერთ-ერთ ბოლო პოზიციაში. ამ ჩვეულებრივ დახურულ პოზიციაში შიგა გასასვლელი დაბლოკილია და ვალვის გასწვრივ ნაკადის მარშრუტი დახურულია. ამ ტიპს ჩვეულებრივ დახურული წნევის რეგულირების ვალვა ეწოდება.
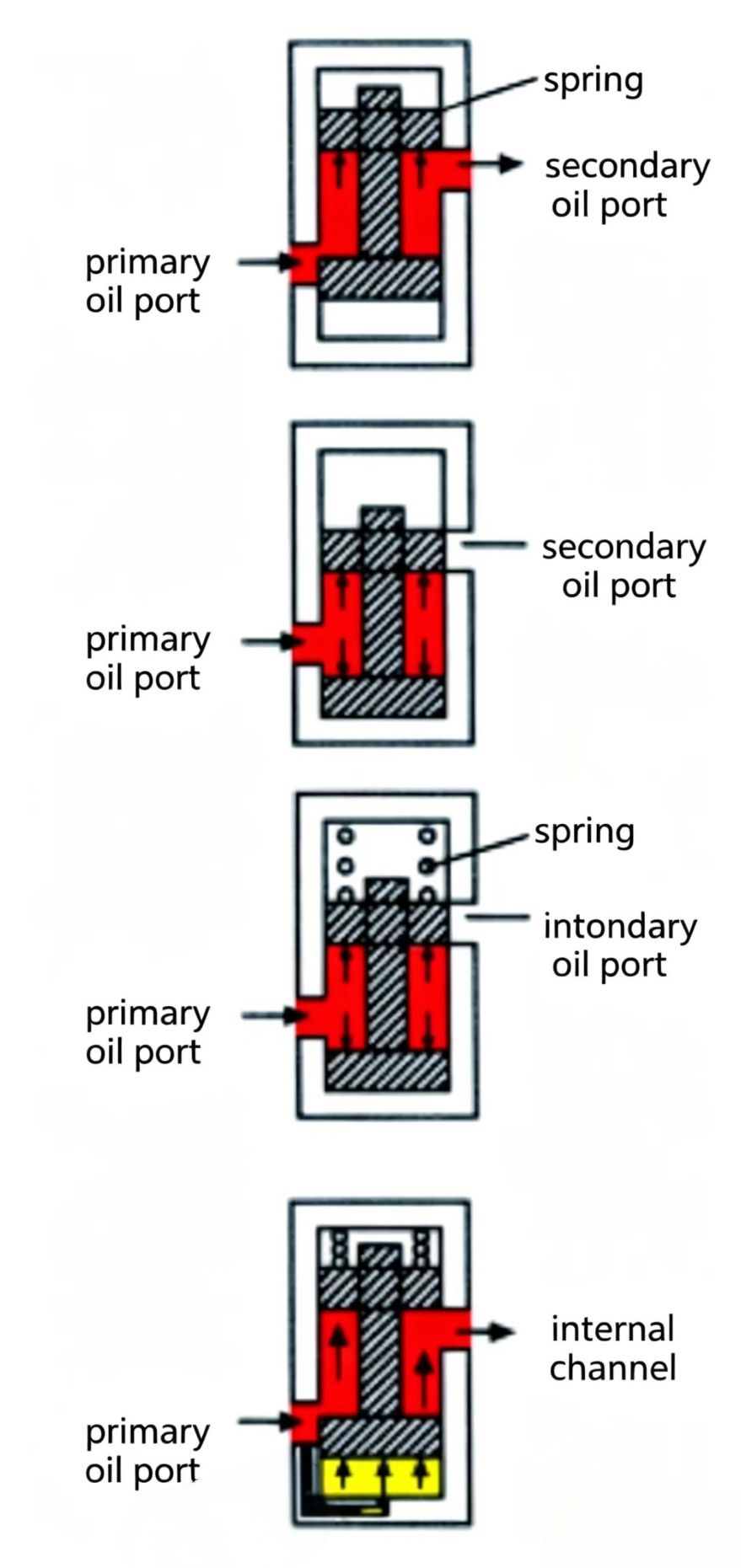
Წნევის რეგულაციის ვალვა აღიქვამს წნევას სპულის ქვედა ნაკვეთში. ეს ქვედა გასასვლელი დაკავშირებულია პრიმარულ პორტს. როდესაც სისტემის წნევა აღემატება სპირალური ძალის მნიშვნელობას, სპული იძრება და შეერთებს შიდა გასასვლელს, რაც საშუალებას აძლევს სითხის გატარებას ვალვით.
(სპულის მოძრაობის რეგულირებისთვის გამოყენებული ჰიდრავლიკური წნევა ეწოდება პილოტ წნევას. პილოტ წნევის გამოყენება ვალვის მართვისთვის ეწოდება პილოტ კონტროლს და ეს არის ყველაზე გავრცელებული მეთოდი ყველა ტიპის ჰიდრავლიკური ვალვების მართვისთვის.)
Თუ ამ ტიპის წნევის რეგულაციის ვალვის პრიმარული პორტი დაკავშირებულია სისტემის წნევის მხარეს და პომპის მიერ შექმნილი წნევა ძალიან მაღალია, მაშინ პომპიდან გამოსული სითხე შეიძლება გადაიყაროს ამ ვალვით ზეთის ტანკში — ამ ტიპის ჩვეულებრივ დახურული წნევის რეგულაციის ვალვას ეწოდება განთავისუფლების ვალვა.
Ნახაზი 7-2. ჩვეულებრივ დახურული წნევის რეგულაციის ვალვა (განთავისუფლების ვალვის მუშაობა). სპირალი სპულს დახურულად ინარჩუნებს სისტემის წნევა სპირალის მოწესრიგების მნიშვნელობას არ აღემატებამდე; შემდეგ სპული გადაინაცვლება და გახსნის გზას ტანკისკენ.
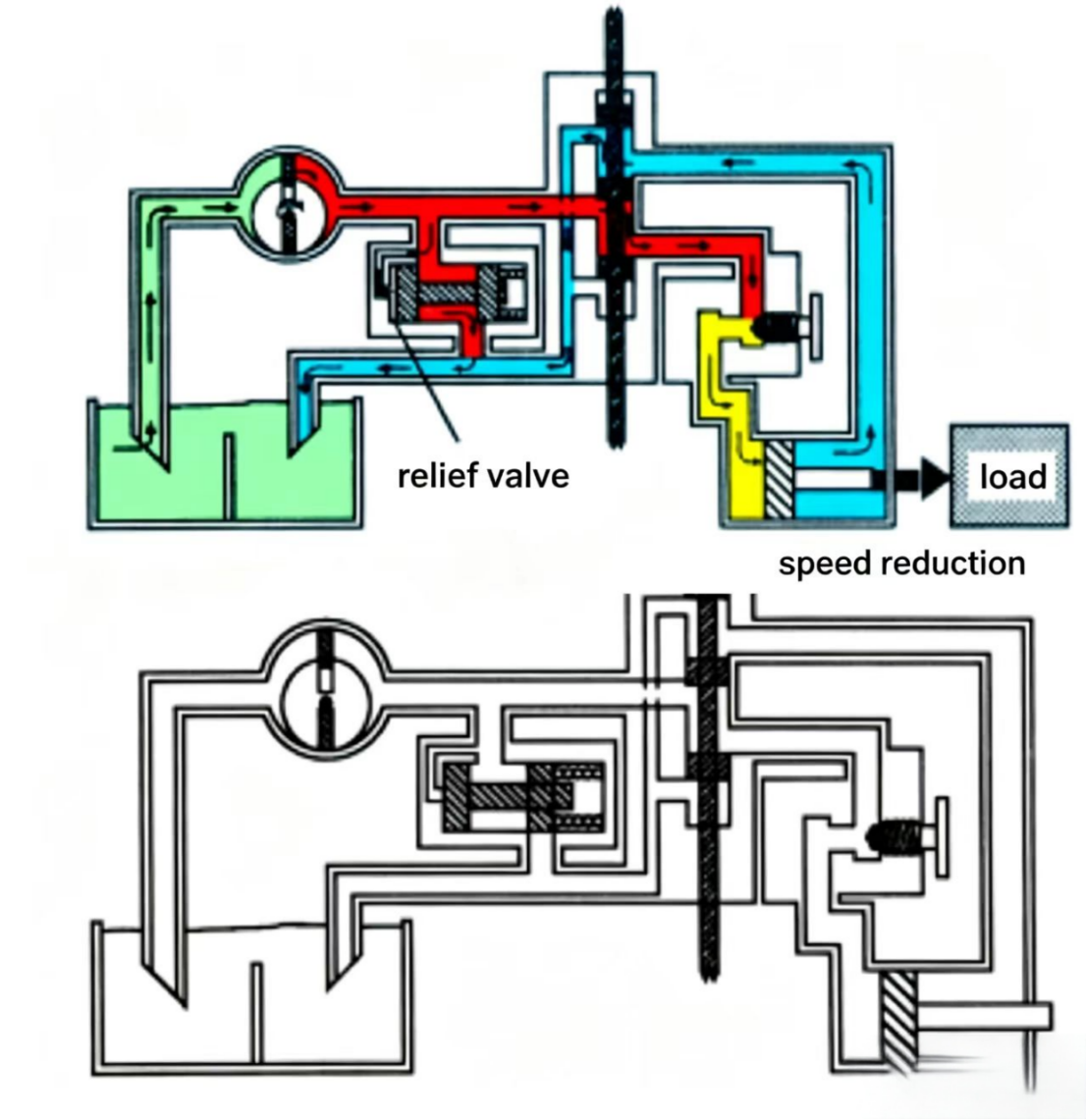
Ნახაზი 7-3 სირთულის მინიმალური ჰიდრავლიკური წრედი წნევის რეგულირებით (გადატვირთვის ვენტილი). როდესაც ცილინდრი აღწევს სტროკის ბოლოს, გადატვირთვის ვენტილი გაიხსნება და მიმართავს პომპის ნაკადს უკან ტანკში, რაც შეზღუდავს სისტემის მაქსიმალურ წნევას.
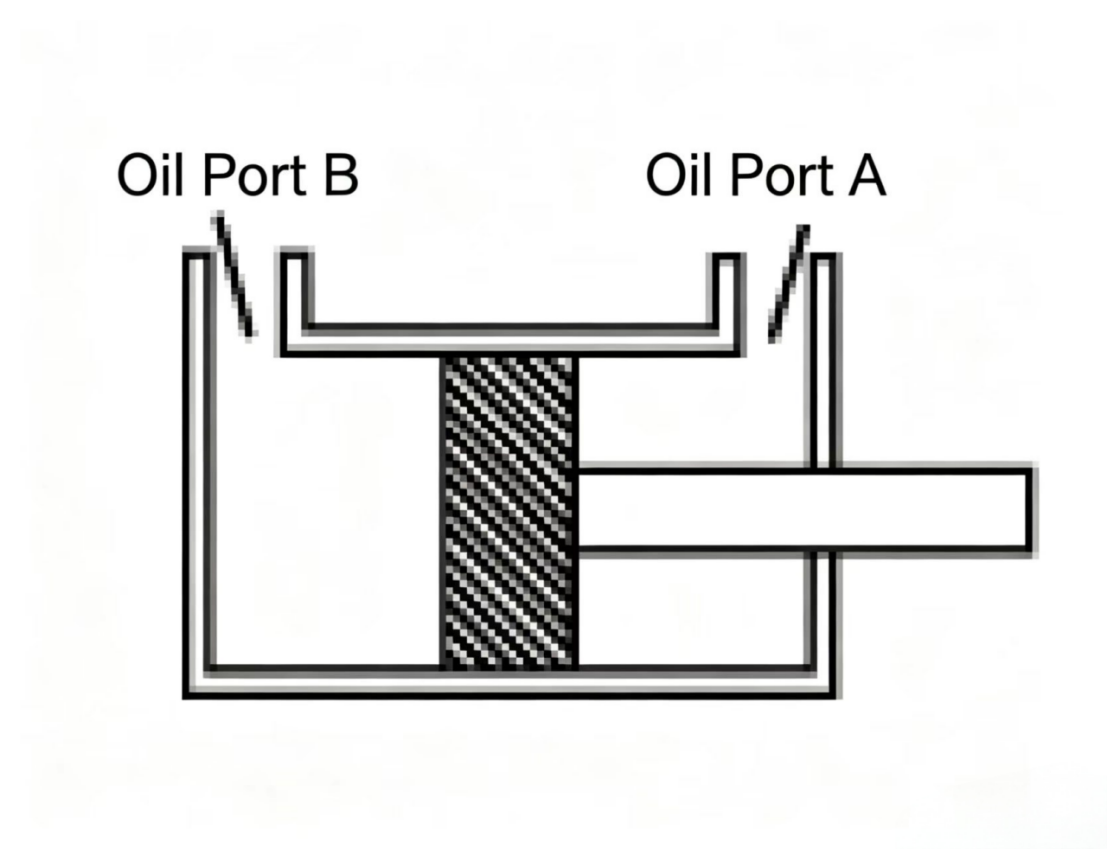
Ერთხელ სრულად გაშლილი ჰიდრავლიკური ცილინდრი უნდა შეიკუმშოს, რათა ხელახლა შეიძლება მუშაობა. ამ მიზეზით, ორივე მიმართულებით მოძრავი ცილინდრები ჩვეულებრივ იყენებენ ორი პორტით დაკომპლექტებულ ჰიდრავლიკურ ცილინდრებს — ორმხრივი მოქმედების ცილინდრებს. ნაკადის მიმართულება უნდა შეიცვალოს ერთდროულად.
Ორმხრივი მოქმედების ჰიდრავლიკური ცილინდრს ბარელის თითოეულ ბოლოს აქვს ერთი პორტი, რაც საშუალებას აძლევს ზეთს შესვლის და გამოსვლის შესაძლებლობას, ამიტომ პისტონი შეიძლება მოძრაობდეს ორივე მიმართულებით (ორმხრივი მოქმედება). ორმხრივი მოქმედების ცილინდრის ორივე პორტის გამოსარჩევად ერთი პორტი აღნიშნავენ "A"-თი, ხოლო მეორე — "B"-თი.
Მიმართულების რეგულირების ვენტილის შიდა მოძრავი ნაკეთობა ახდენს ვენტილის სხეულის შიდა გასასვლელების შეერთებას ან დახურვას, რაც საშუალებას აძლევს ზეწოლის ქვეშ მყოფი სითხის მიმართულების რეგულირებას.
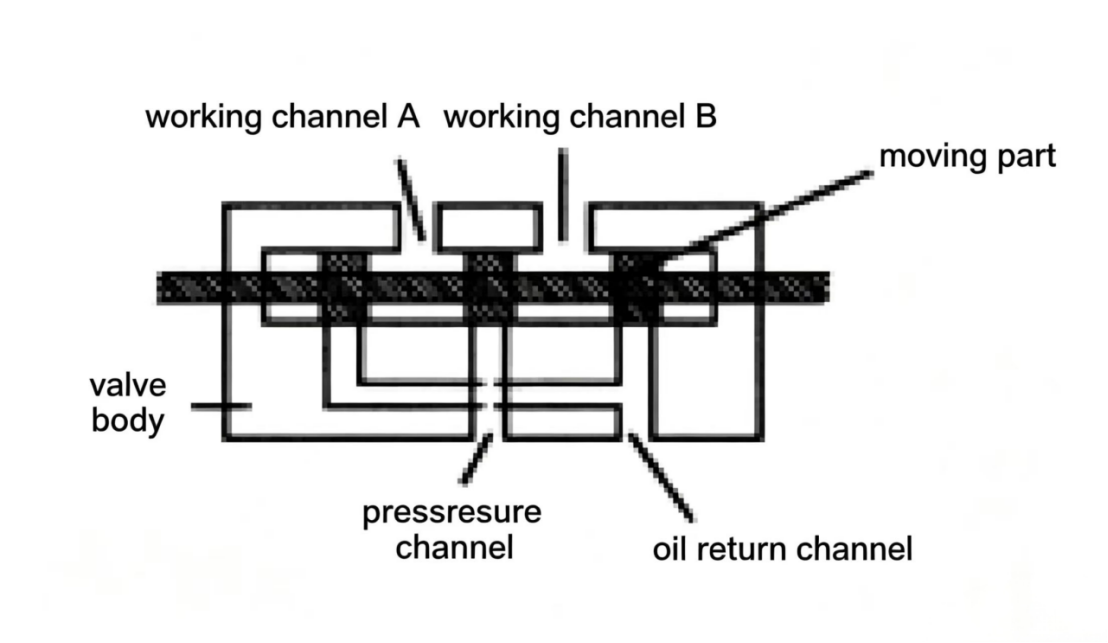
Ტიპიური მიმართულების რეგულირების ვენტილის სხეულში არის ოთხი შიდა გასასვლელი და სრიალებადი სპული, რომელიც შეუძლია ამ გასასვლელების შეერთება ან დახურვა.
Როდესაც სპული ერთ-ერთ ბოლო პოზიციაშია, ზეწოლის გასასვლელი შეერთებულია სამუშაო გასასვლელ A-თან, ხოლო დაბრუნების გასასვლელი — სამუშაო გასასვლელ B-თან. როდესაც სპული გადაიდის მეორე ბოლო პოზიციაში, ზეწოლის გასასვლელი შეერთებულია სამუშაო გასასვლელ B-თან, ხოლო დაბრუნების გასასვლელი — სამუშაო გასასვლელ A-თან. სპულის მიმართულების შეცვლა ცვლის ჰიდრავლიკური ცილინდრის შიგნით სითხის მიმართულებას.
Როდესაც ცილინდრის ძრავა სრულად გაშლება და შეიკუმშება მოთხოვნილების შესაბამად, სამუშაო პროცესი სრულდება. როდესაც სპული გადაინაცვლებს სხვა ბოლოს, ზეთი ჩაედინება ცილინდრის სხვა მხარეში — და ცილინდრის ძრავა შეიკუმშება.
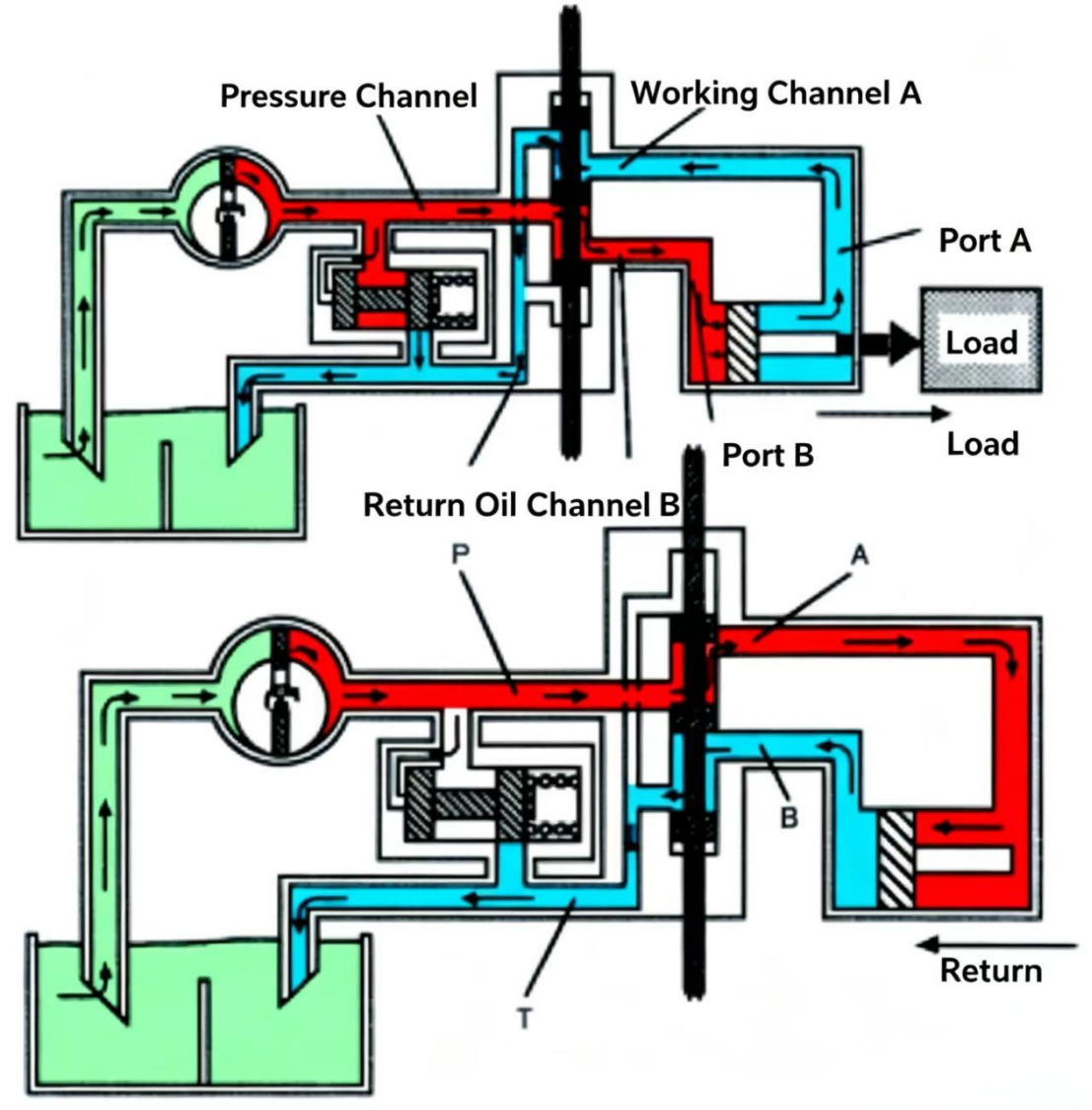
Ნახაზი 7-4: ორმხრივი მოქმედების ცილინდრის წრედში მიმართულების რეგულირების ვალვა. სპულის გადაადგილება იცვლის ზეთის გატაცების მიმართულებას, რაც ცილინდრის მოძრაობის მიმართულებას იცვლის.
Ბევრ აპლიკაციაში მოქმედების ელემენტის სამუშაო სიჩქარე უნდა იყოს რეგულირებული, ხშირად კი ძალზე სწორად რეგულირებული. როგორც ადრე აღინიშნა, მოქმედების ელემენტების (ცილინდრების, ჰიდრავლიკური მოძრავების) სიჩქარე პირდაპირ დაკავშირებულია ზეთის შეყვანის სიჩქარეს — მოქმედების ელემენტის სიჩქარე განისაზღვრება შეყვანილი ნაკადის სიჩქარით.
Რადგან პუმპის განტოლება შეიძლება იყოს ფიქსირებული, შესაძლებელია პუმპის ნაკადის სიჩქარის არჩევა მოთხოვნილი მოქმედების ელემენტის სიჩქარის მიხედვით. ეს მხოლოდ ერთი მოქმედების ელემენტის მქონე სისტემებში შეიძლება.
Ჩვეულებრივ ჰიდრავლიკურ სისტემაში აქტუატორები ერთზე მეტია. თუ სისტემა მოითხოვს, რომ თითოეული ჰიდრავლიკური ცილინდრი მოძრაობდეს დამოუკიდებლად, მაშინ სასურველი არის პომპის გატარების სიჩქარის შერჩევა იმ ყველაზე დიდი ჰიდრავლიკური ცილინდრის მიხედვით, რომელსაც სჭირდება ყველაზე მაღალი სიჩქარე. ეს ნიშნავს, რომ პატარა აქტუატორები უფრო სწრაფად მოძრავენ, რაც შეიძლება არ იყოს სასურველი. ამ ან სხვა ნებისმიერი აქტუატორის შესვლელი ნაკადის შესამცირებლად სჭირდება ნაკადის რეგულირების ვალვის გამოყენება.
Ნაკადის რეგულირების ვალვის გამოყენების დროს ყოველთვის შესაძლებელია პომპიდან აქტუატორში მიმავალი ნაკადის შემცირება.
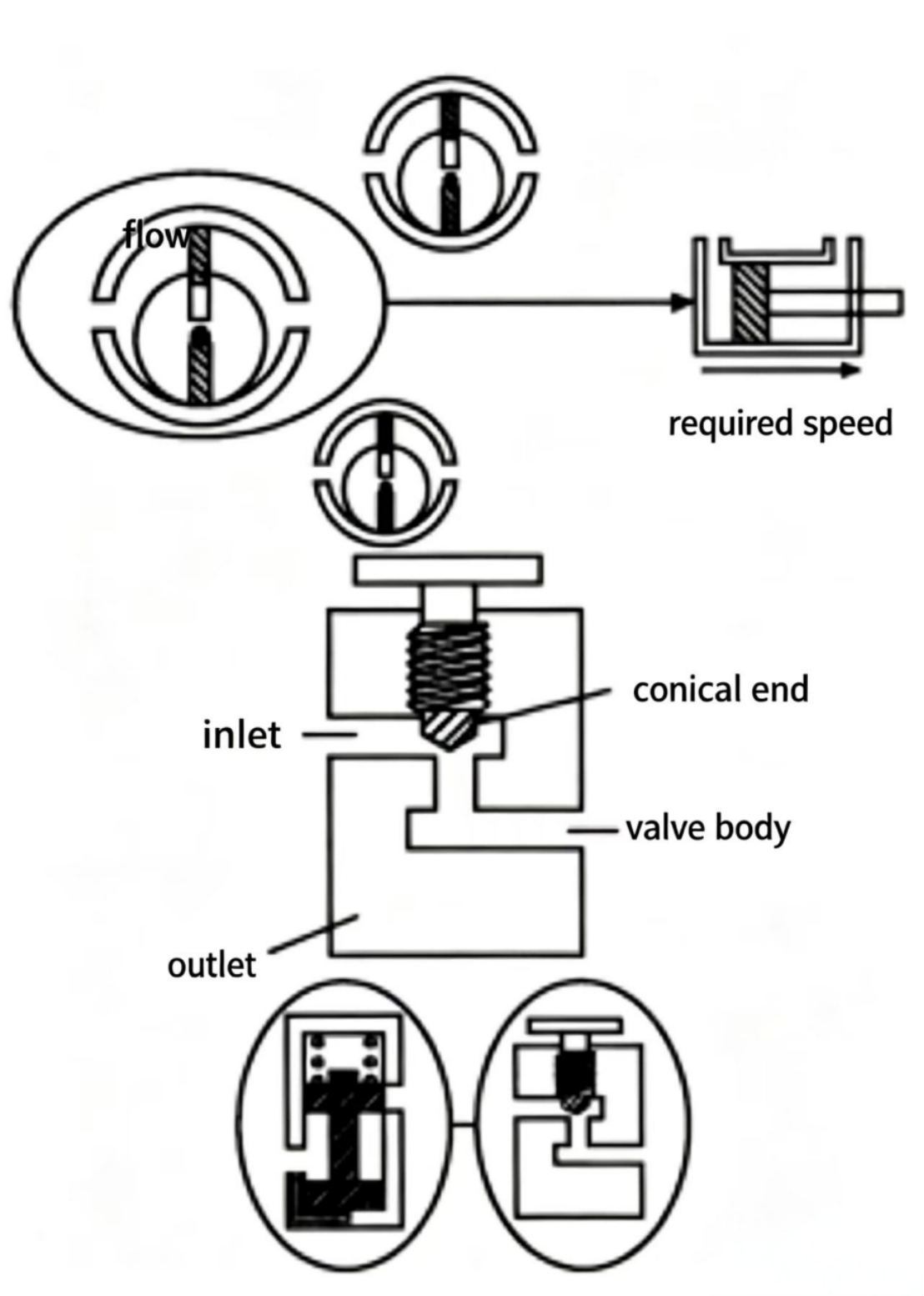
Ტიპური ნაკადის რეგულირების ვალვა შედგება ვალვის სხელისგან და მოძრავი ნაკეთობისგან. ჩვენს მაგალითში მოძრავი ნაკეთობა არის კონუსური ბოლოს მქონე რეგულირების სივრცე. რადგან სივრცე მოძრავი არ არის ექსპლუატაციის დროს (ის წინასწარ დაყენებულია გარკვეულ პოზიციაში), უფრო შესაფერებელია ნაკადის რეგულირების ვალვის მოძრავი ნაკეთობების მიხედვით მათ "რეგულირებად" უწოდება, ვიდრე "მოძრავ".
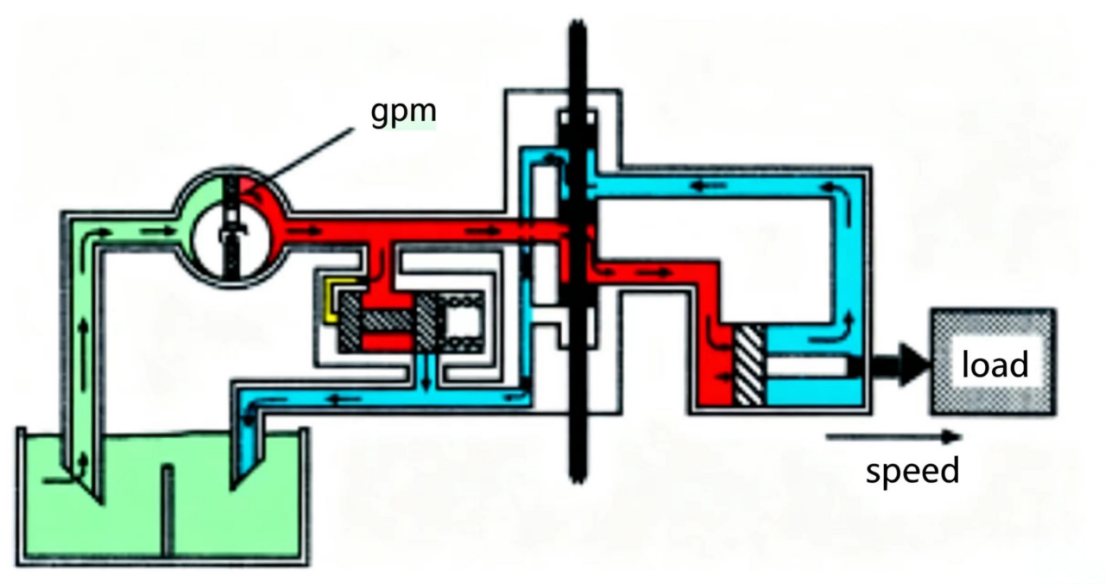
Ჰიდრავლიკურ სისტემაში სითხის განაწილების სადგური ყოველთვის მუშაობს წნევის რეგულირების (საცავი) სადგურთან ერთად. სითხის განაწილების სადგური წარმოადგენს წინაღობას. ის იწვევს ჰიდრავლიკური პომპის მიერ მაღალი წნევის წარმოქმნას. ეს წნევა შეიძლება გამოიწვიოს პომპიდან მომავალი სითხის ნაკადის ნაკლებობა, რაც საცავი სადგურის გახსნას იწვევს და ამ გზით ამცირებს სითხის განაწილების სადგურის მეშვეობით გამავალ ნაკადს და მის მიღებას მოქმედების მოწყობილობაში.
Ნახაზი 7-5. სითხის განაწილების წრედი. სივრცის სადგური შეზღუდავს ნაკადს ცილინდრისკენ. პომპის ზედმეტი ნაკადი საცავი სადგურის მეშვეობით მიემართება რეზერვუარში. სივრცის სადგურის ღელაკის გახსნა განსაზღვრავს ცილინდრის სიჩქარეს.
Ზემოთ წარმოდგენილი ყველა კომპონენტი შეიძლება შეადგენდეს მარტივი ჰიდრავლიკური სისტემის ნაკრებს. რადგან ამ სისტემაში ჰიდრავლიკური ენერგია კონტროლირებადია, ამ სისტემას შეუძლია სასარგებლო სამუშაო შესრულება.
Ჰიდრავლიკური სისტემები ფართოდ გამოიყენება მრავალ სფეროში — აეროკოსმოსური ტექნიკიდან, საჰაერო ტექნიკიდან და სამხედრო აღჭურვილობიდან იწყებული და მრეწველობაში, სავალდებულო მანქანებში და ფოლადი აღჭურვილობაში გამოყენებულ სისტემებამდე. ამ ყველა გამოყენების შემთხვევაში ჰიდრავლიკური სისტემების მუშაობის პრინციპი იგივეა, როგორც ზემოთ აღნიშნულია. სხვადასხვა „ტიპის“ ჰიდრავლიკური სისტემების ერთადერთი განსხვავება მათში გამოყენებული კომპონენტებში მდებარეობს.
Შემდეგი თავების განმავლობაში ჩვენ დეტალურად განვიხილავთ სხვადასხვა ტიპის კომპონენტებს — ისინი გამოიყენება მრეწველობაში გამოყენებულ ჰიდრავლიკურ სისტემებში. ამ კომპონენტების გამოყენების წესის ახსნის მიზნით ჩვენ ასევე შევადგენთ რამდენიმე ძირითად ჰიდრავლიკურ წრედს.
Წინა განხილვებში ჰიდრავლიკური კომპონენტებისა და ძირითადი სისტემების შესახებ ყველაფერი გრაფიკულად იყო ახსნილი — კომპონენტების შიგნით მიმდინარე პროცესების ვიზუალურად წარმოდგენის მიზნით გამოყენებული იყო განივი კვეთები. ეს მეთოდი პრობლემების ახსნის დროს სასარგებლოა, მაგრამ ყოველდღიური სამუშაო პრაქტიკის მიმართულებით ის არ არის პრაქტიკული.
Როგორც სხვა ტექნიკური სფეროები, ჰიდრავლიკაც იყენებს გრაფიკულ სიმბოლოებს კომპონენტებისა და სისტემების წარმოსადგენად. ადრე განხილული სხვადასხვა ჰიდრავლიკური კომპონენტი და მარტივი სისტემები ყველა შეიძლება წარმოდგენილი იყოს ANSI Y32.10 ან ISO 1219 სტანდარტის მიხედვით დამზადებული ჰიდრავლიკური და პნევმატიკური გრაფიკული სიმბოლოებით.
Უკვე განხილული კომპონენტების გარდა, ჰიდრავლიკური სისტემის კომპონენტებში შედის ასევე ელექტროძრავები, ჰიდრავლიკური ფილტრები და სხვა. ჰიდრავლიკური სისტემები ჩვეულებრივ ელექტროძრავებით მართვას ექვემდებარება. ასევე, საჭიროების შესაბამად სისტემის სისუფთავის შესანარჩუნებლად, ჰიდრავლიკური სისტემები უნდა იყენებდნენ ჰიდრავლიკურ ფილტრებს სითხის დაბანდებისგან დასაცავად.
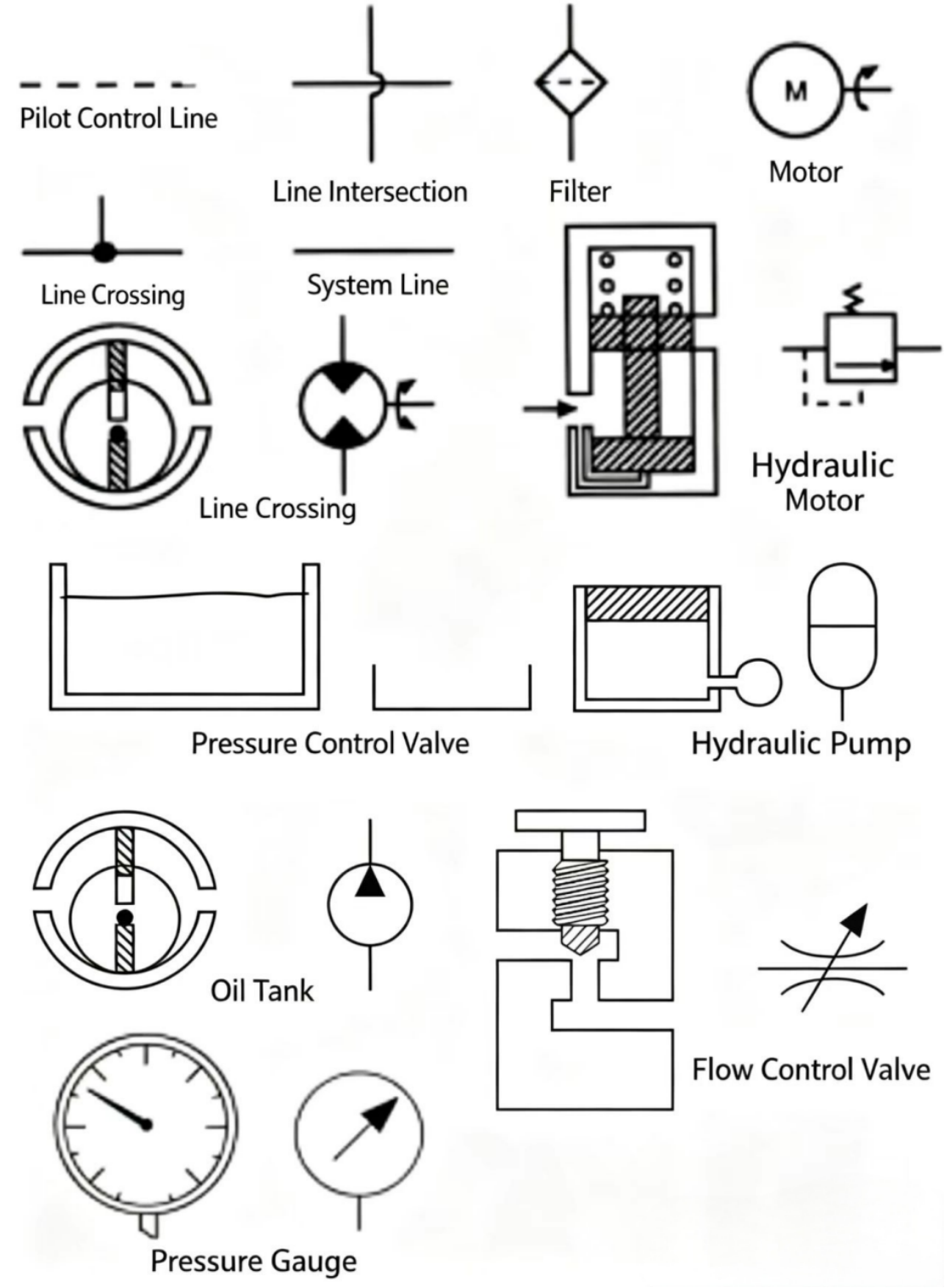
Ნახაზი 7-7. სტანდარტული ჰიდრავლიკური გრაფიკული სიმბოლოები (ANSI Y32.10 / ISO 1219). ეს სიმბოლოები გამოიყენება ყველა ჰიდრავლიკური წრედის სქემატულ დიაგრამებზე კვეთის ნახაზების ნაცვლად.
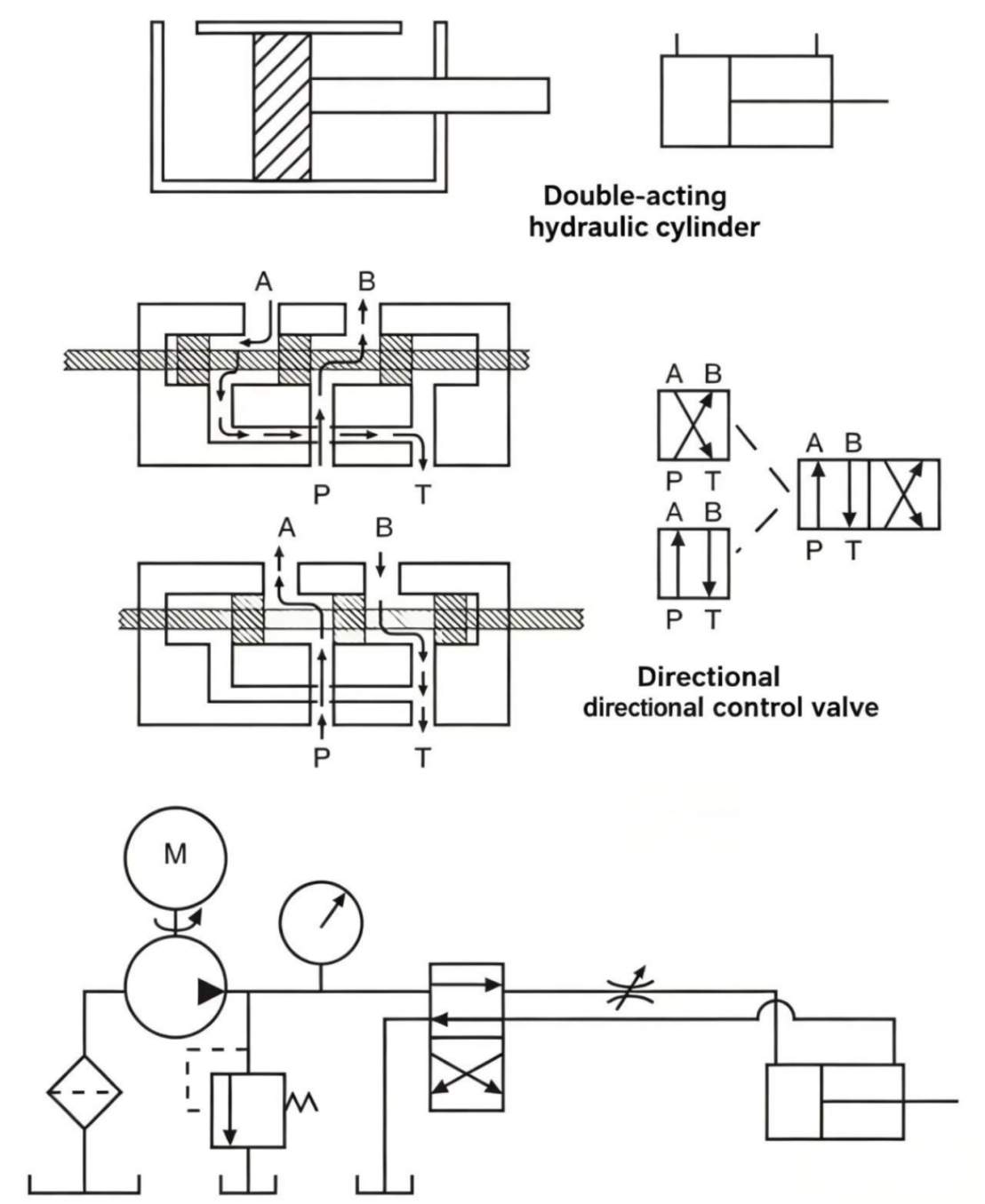
Ნახაზი 7-8. სრული მარტივი ჰიდრავლიკური წრედი, რომელიც წარმოდგენილია სტანდარტული გრაფიკული სიმბოლოებით. ეს არის ის სახე, რომლითაც ჰიდრავლიკური წრედები ინჟინერულ პრაქტიკაში ხაზდება.

gaussian HOVOO, კიტაიური სიმოქმედი ფაბრიკა. PU, რ椽ubber და PTFE სიმოქმედის წარმოება. სიმოქმედები მოიცავს O-გარე, პისტონის სიმოქმედებს, რდომის სიმოქმედებს, Gray გარე და გაზის სიმოქმედებს.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}