33-99 ნომ. Mufu E გამზ Gaussian რაიონი, ნანჯინგი, ჩინეთი [email protected] | [email protected]
33-99 ნომ. Mufu E გამზ Gaussian რაიონი, ნანჯინგი, ჩინეთი [email protected] | [email protected]

Ჰიდრავლიკური ქანების დამხშრევის დიზაინი ნიშნავს სტრუქტურული პარამეტრების გამოთვლას, რომლებიც უნდა დააკმაყოფილონ დიზაინის სპეციფიკაციაში მოცემული სამუშაო მოთხოვნები. ამ სტრუქტურული პარამეტრების შესაბამად, ჰიდრავლიკური ქანების დამხშრევი შეძლებს მოცემული შეჯახების ენერგიისა და შეჯახების სიხშირის მიღწევას.
Უნდა მკაცრად აღინიშნოს, რომ ჰიდრავლიკური ქანების დამხშრევი შეჯახების ენერგიასა და შეჯახების სიხშირის გამოტანას ახდენს პისტონის მოძრაობით წინ-უკან მოცემული სტროკის ფარგლებში Ს ცილინდრის სხეულში. ამ ფიქსირებულ სტროკზე პისტონი უწყვეტად მოძრაობს: უკან მოძრაობის აჩქარება → უკან მოძრაობის შემ slowing (დამუხრუჭება) → უკან მოძრაობის სიჩქარე ნულამდე ეშვება → ძალით მოძრაობის აჩქარება → მაქსიმალური სიჩქარით ეჯახება შემოკვეთის წერტილს v მ → ეჯახება გამაგრების ბოლოს (გამოყოფს შემოკვეთის ენერგიას) → იწყებს შემდეგ ციკლს. ეს ფიქსირებული სტროკი Ს ეწოდება პისტონის სტროკს; ეს არის ცილინდრის სხეულის განზომილებების განსაზღვრის მნიშვნელოვანი საფუძველი.
Პისტონი ცილინდრის სხეულში წინ-უკან მოძრაობს. შემოკვეთის წერტილიდან დაწყებული, ის უკან მოძრაობის აჩქარებით მიაღწევს მაქსიმალურ უკან მოძრაობის სიჩქარეს v mo , შემდეგ ვალვების გადართვის გამო იწყებს შემ slowing-ს; სიჩქარე სწრაფად ეშვება მისი v mo ნულამდე — პისტონი გაჩერდება ზედა მკვდარ წერტილში. პისტონის მიერ გავლელი სვლა ეწოდება უკან სვლას. ამ მომენტში, რადგან კლაპანი ჯერ კიდევა თავდაპირველ მდგომარეობაში, პისტონი იწყებს აჩქარებას ძალის სვლაზე, სანამ არ მიაღწევს შეხედვის წერტილს. როცა პისტონი ეხება ხელსაწყოს ბოლოს, მისი სიჩქარე აღწევს მაქსიმუმს — რომელსაც ეწოდება პისტონის მაქსიმალური შეხედვის სიჩქარე v მ . პისტონის მიერ ზედა მკვდარ წერტილიდან ხელსაწყოს ბოლოს შეხებამდე გავლელი სვლა ეწოდება ძალის სვლას. ცხადია, უკან სვლა და ძალის სვლა უნდა იყოს ტოლი.
Ჰიდრავლიკური ქანების დამხსნელის დიზაინის თეორიის უფრო ღრმად შესწავლისთვის სასარგებლოა ჯერ კიდევა გაგება პისტონის სიჩქარის, სხვადასხვა კამერის წნევების და ექსპლუატაციის დროს სითხის განაწილებისა და ცვლილებების. ჰიდრავლიკური ქანების დამხსნელის ექსპლუატაციის დროს სამუშაო პარამეტრების ცვლილებების მიზეზები და მიმართულება ნაჩვენებია ნახაზში 2-4. 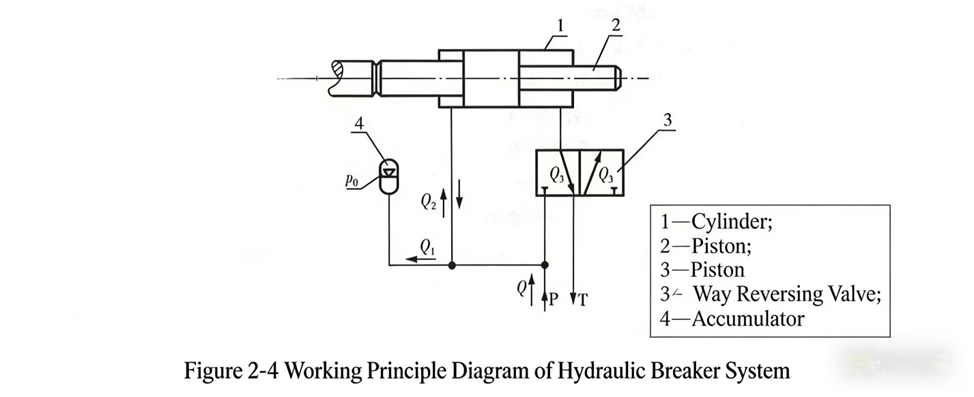
p 0არის აკუმულატორში აზოტის წინასწარი შევსების წნევა; Q არის სადგურის მიერ ჰიდრავლიკური ქანების დამხსნელს მიწოდებული სითხის დინება; Q 1არის აკუმულატორის შესასვლელი ნაკადი (+) და გამოსასვლელი ნაკადი (−); Q 2არის პისტონის წინა კომპარტმენტის შესასვლელი ნაკადი (+) და გამოსასვლელი ნაკადი (−), სადაც Q = Q 1 + Q 2. Q 3არის პისტონის უკანა კომპარტმენტის შესასვლელი ნაკადი (+) და გამოსასვლელი ნაკადი (−); p არის სისტემის წნევა.
Ნახ. 2-4 აჩვენებს პისტონს დაბრუნების სტროკის დასაწყისში. სასურველი ნაკადი Q შედის სისტემაში; მისი ერთი ნაკადი ( Q 2) შედის პისტონის წინა კომპარტმენტში და აძრავს მის დაბრუნების სტროკას, ხოლო უკანა კომპარტმენტი გამოაქვეყნებს ზეთს ტენკში ( Q 3); მეორე ნაკადი ( Q 1) შედის აკუმულატორში და შეკუმშავს აზოტს, ამიტომ სისტემის წნევა p იწყება აკუმულატორის წინასწარ შევსების წნევიდან p 0და უწყვეტად იზრდება, როგორც Q 1ჩაისხლება. ჰიდრავლიკური ქანების დამხსნელის მოძრაობა, პისტონის მუშაობის მდგომარეობაზე დაფუძნებული, საერთოდ შეიძლება დაიყოს სამ ეტაპად, რომლებიც აღნიშნულია ქვემოთ:
(1) პისტონის უკან მოძრაობის აჩქარება
Პისტონი დაიწყებს უკან მოძრაობას შეჯახების წერტილიდან. რადგან პუმპა უწყვეტად აწოდებს სითხის ნაკადს, სისტემის წნევა p ↑ → პისტონის სიჩქარე v ↑ → Q 2↑ → Q 1↓ → Q 3↑, და სითხე უწყვეტად გამოიყოფა რეზერვუარში. რადგან პისტონის სიჩქარე v ↑ → Q 2↑ → Q 1↓, სანამ Q 1= 0. ამ პერიოდის მახასიათებელი ნიშანია v ↑ და p ↑. როდესაც Q 1= 0, ჩნდება გადატრიალების წერტილი: წნევა p უკვე აღარ იზრდება, მაგრამ პისტონის სიჩქარე ისევ იზრდება (რადგან პისტონის უკან მოძრაობის ძალა ჯერ არსებობს). ამ გადატრიალების წერტილის შემდეგ, რადგან v ↑, სასხენელის ნაკადი Q აღარ შეძლებს დააკმაყოფილოს პისტონის მოძრაობის ნაკადის მოთხოვნა, ანუ Q 2 > Q . პისტონის წინა კომპარტმენტის ნაკადის მოთხოვნის დასაკმაყოფილებლად, აკუმულატორს ახლა უნდა გამოატაროს ზეთი, რათა დააფაროს სასხენელის ნაკადის დეფიციტი. ნაკადის ბალანსის პრინციპის მიხედვით, Q 2 = Q + Q 1; ამ მომენტში Q 1არის ნაკადი, რომელიც გამოდის აკუმულატორიდან და შედის პისტონის წინა კომპარტმენტში, სანამ v ↑ სანამ v = v mo ვალვები გადაირთვება, ხოლო პისტონი შედის უკან მოძრაობის დამანებების ფაზაში.
(2) პისტონის უკან მოძრაობის დამანებება
Უკან მოძრაობის დროს, რადგან პისტონის წინა კიდე უკვე გადავიდა უკუკავშირის ხვრელზე, ვალვები გადაირთვება და პისტონზე მოქმედების ძალის მიმართულება იცვლება; მძრავი ძალა პისტონზე მოქმედებს საპირისპირო მიმართულებით, და პისტონი იწყებს დამანებებას, სანამ v = 0. ამ მომენტში უკან მოძრაობა სრულდება; პისტონი მიაღწევს ზედა მკვდარ წერტილს და გადის სრულ სტროკას Ს , რათა ძალის მოძრაობა დაიწყოს.
(3) პისტონის ძალის მოძრაობა
Როდესაც პისტონის სიჩქარე კლებულობს до v = 0-მდე, პისტონზე მოქმედების ძალა იცვლება, ამიტომ პისტონის სიჩქარეც v იცვლება — პლიუსიდან მინუსში. შემდეგ პისტონი იწყებს აჩქარებას ძალის მოძრაობის დროს შეცვლილი ძალის ქვეშ. ძალის მოძრაობის აჩქარების დასაწყისში პისტონის სიჩქარე იწყება v = 0-დან, რომელსაც შემდეგ პისტონის ზეთის მოხმარება Q 3= 0; ყველა სასურგულის გამოტაცება Q შედის აკუმულატორში, Q 1 = Q , Q 2= 0. რადგან ძალის სტროკის სიჩქარე v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. აქ შეიძლება შევნიშნოთ, რომ წინა კომპარტმენტის ფართობი Ა 2ნაკლებია უკანა კომპარტმენტის ფართობზე Ა 1, ამიტომ მიმოქცევის ბალანსის პრინციპის მიხედვით, აუცილებლად უნდა იყოს Q 3 = Q 2 + Q − Q 1, აქვს v ↑ და Q 1↓, სანამ Q 1= 0. ეს ნიშნავს, რომ v ↑; ამ მომენტში სასურგულის ყველა გამოტაცება Q სრულად შედის პისტონის უკანა კომპარტმენტში, ანუ Q 3 = Q , Q 1= 0, მაგრამ პისტონის სიჩქარე v ჯერ არ მიაღწია მაქსიმალურ სიჩქარეს. v მ . პისტონი განაგრძობს აჩქარება; ტუმბოს ნაკადი Q ვეღარ შეუძლია მოთხოვნის დაკმაყოფილება, ამიტომ აკუმულატორი იწყებს ნაკადის დამატებას, ანუ Q 3 = Q + Q 1(−), სანამ პისტონი შეხვდა ხრახნის კუდი მაქსიმალური სიჩქარით v მ . შეჯახების მომენტში, პისტონის სიჩქარე უეცრად ხდება v = 0, და პისტონის გამომავალი გავლენის ენერგია W გარედან, ერთი სამუშაო ციკლის დასრულებით.
Როგორც აკუმულატორის შეყვანა/გათავისუფლება ნაკადი Q 1ცვლილებები, სისტემის წნევა p ასევე იცვლება შესაბამისად. აკუმულატორის დამუხტვისას, Q 1= '+', სისტემის წნევა p ↑; როდესაც აკუმულატორი გამოყოფს სითხეს გარეთ, Q 1= '−', სისტემის წნევა p ↓. სხვა სიტყვებით რომ ვთქვათ, ჰიდრავლიკური ქანების დამხსნელის მუშაობის პროცესი ყოველთვის ახლავს სისტემის წნევის ცვლილებები. როდესაც აკუმულატორში ყველაზე მეტი სითხე შეივსებულია, სისტემის წნევა მაქსიმალურია. როდესაც პისტონი მიაღწევს დარტყმის წერტილს, აკუმულატორი გამოყოფს ყველაზე მეტი სითხე — ეს არის სისტემის წნევის მინიმალური მნიშვნელობის მომენტი. ამიტომ, ჰიდრავლიკური ქანების დამხსნელის ჩართვიდან მის სტაციონარულ მუშაობას მიღწევამდე მისი სისტემის მუშაობის წნევა p ყოველთვის ციკლურად იცვლება მაქსიმალური წნევის p მაქს. და მინიმალური წნევის p მნ შორის, და ის აბსოლუტურად შეუძლებელია მუდმივი და ცვლილების გარეშე იყოს. ნახ. 2-5 აჩვენებს ყველა სისტემის პარამეტრის ცვლილებას ჰიდრავლიკური ქანების დამხსნელის მუშაობის დროს. 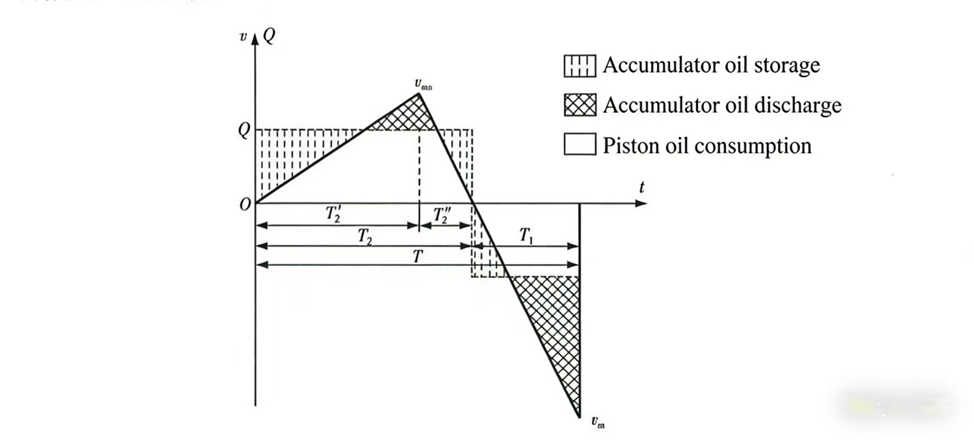
Ნახ. 2-5 ჰიდრავლიკური ქანების დამხსნელის სისტემის პარამეტრების ცვლილება მუშაობის დროს [ლეგენდა: შავდაფარული = აკუმულატორის შევსება; გადაკვეთილი შავდაფარული = აკუმულატორის გამოყენება; თეთრი = პისტონის ზეთის მოხმარება]
Ზემოთ აღწერილი მუშაობის პროცესი აჩვენებს, რომ მუშაობის პარამეტრების ცვლილება საკმაოდ რთულია — ეს არის არაწრფივი სისტემა. ეს სირთულე მნიშვნელოვნად ართულებს სიღრმისეულ თეორიულ ანალიზსა და კვლევას. ფაქტობრივად, ეს არის ერთ-ერთი ძირეული მიზეზი, რის გამოაც ჰიდრავლიკური ქანების დამხსნელების თეორიული კვლევა ჩამორჩება პროდუქტების განვითარებას.
Მსოფლიო მასშტაბით მეცნიერებმა ჰიდრავლიკური შეჯახების მოწყობილობების (ჰიდრავლიკური ქანების დამხსნელების) თეორიული კვლევის დასაწყებად საერთოდ ორი განსხვავებული ტექნიკური მიდგომა მიიღეს: წრფივი სისტემის თეორიაზე დაფუძნებული კვლევა და არაწრფივი სისტემის თეორიაზე დაფუძნებული კვლევა.
1) წრფივი სისტემის თეორიაზე დაფუძნებული კვლევა ვარაუდობს, რომ პისტონზე მოქმედებული ძალა მუდმივია, პისტონის სიჩქარე ერთნაირი ტემპით იზრდება და გარკვეული გავლენას ახდენელი ფაქტორები იგნორირებულია; ამ საფუძველზე აგებულია წრფივი მათემატიკური მოდელი თეორიული კვლევის მიზნით. ეს კვლევის მეთოდი აშკარად მარტივია და შეიძლება ამოხსნას ზოგიერთი პრაქტიკული პრობლემა, მაგრამ ის არ არის ძალიან სწორი და მნიშვნელოვან შეცდომებს შეიცავს.
2) არაწრფივი სისტემის თეორიაზე დაფუძნებული კვლევა იყენებს მაღალი რიგის არაწრფივ დიფერენციალურ განტოლებებს ჰიდრავლიკური ქანების დამხსნელის მოძრაობის კანონზომიერებების აღსაწერად და უფრო სწორად აღწერს ჰიდრავლიკური ქანების დამხსნელის პისტონის კინემატიკასა და დინამიკას. ეს არაწრფივი კვლევა უფრო სწორია ვიდრე წრფივი კვლევა, მაგრამ ჯერ კიდევ ეფუძნება ზოგიერთ ვარაუდს. მიუხედავად იმისა, რომ ის უფრო სწორად ავლენს ჰიდრავლიკური შეტაკების ზოგიერთ ფიზიკურ მოვლენას, მისი ამოხსნა რთულია, ინტერპრეტაცია არ არის მარტივი და მხოლოდ კომპიუტერის გამოყენებით შეიძლება მიიღოს რიცხვითი ამონახსნები, რაც მის გამოყენებას უფრო მძიმეს ხდის.
Ამ ორი მიდგომის გარდა, ავტორებმა მრავალწლიანი მეცნიერული კვლევის შედეგად შემოარჩევეს Ჰიდრავლიკური ქანების დამხსნელების აბსტრაქტული ცვლადების დიზაინის თეორია (ჰიდრავლიკური შეჯახების მექანიზმები). აბსტრაქტული ცვლადების დიზაინის თეორიის გამოყენებით შესაძლებელია ჰიდრავლიკური ქანების დამხსნელების ანალიტიკური ამონახსნების მიღება, რაც საშუალებას აძლევს საგრძნობაროდ გამოვავლინოთ ჰიდრავლიკური ქანების დამხსნელების მოძრაობის შიგა კანონზომიერებები და მომხმარებლების ტექნიკური ინოვაციების მოსახდელად მივაწოდოთ თეორიული საფუძველი.
Ჰიდრავლიკური ქანების გამყოფის კვლევის მიდგომა — აბსტრაქტული ცვლადების დიზაინის თეორია: აღიარებს ჰიდრავლიკური ქანების გამყოფის მუშაობის პარამეტრების არაწრფივობას, მაგრამ არაწრფივი სისტემის წრფივებად გადასაყვანად იყენებს ეკვივალენტური ძალის ტრანსფორმაციას, რათა მისი შესწავლა შესაძლებელი გახადოს წრფივი სისტემების მეთოდებით და ანალიტიკური ამონახსნები მიიღოს. ამ მეთოდით მიღებული ჰიდრავლიკური ქანების გამყოფის მუშაობის და სტრუქტურული პარამეტრები საკმაოდ სწორია და გამოთვლა მარტივია. ჰიდრავლიკური ქანების გამყოფის აბსტრაქტული ცვლადების დიზაინის თეორია მომდევნო თავებში დეტალურად განიხილება.

gaussian HOVOO, კიტაიური სიმოქმედი ფაბრიკა. PU, რ椽ubber და PTFE სიმოქმედის წარმოება. სიმოქმედები მოიცავს O-გარე, პისტონის სიმოქმედებს, რდომის სიმოქმედებს, Gray გარე და გაზის სიმოქმედებს.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}