33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]

Silinder hidraulik menukar tenaga hidraulik kepada gerakan mekanikal garis lurus atau linear. Apabila disambungkan kepada beban yang boleh digerakkan, ia melakukan kerja.
Seperti yang diperkenalkan dalam bab-bab sebelumnya, silinder hidraulik terutamanya terdiri daripada satu laras, dua penutup hujung tertutup, satu omboh, satu batang omboh, serta port masukan dan keluaran. Setiap hujung mempunyai satu port — satu untuk minyak masuk dan satu lagi untuk minyak keluar.
rajah 6-1: Silinder hidraulik dwi-tindakan piawai. Minyak memasuki melalui port di sebelah kiri, menyebabkan batang omboh memanjang; minyak yang mengalir melalui port di sebelah kanan akan menarik balik batang omboh tersebut.
Sepanjang langkah silinder, tenaga hidraulik bertindak ke atas omboh yang bergerak. Tekanan yang dihasilkan oleh tenaga hidraulik tersebut tidak akan melebihi rintangan yang dihasilkan oleh beban. Bagi sebuah silinder dengan dimensi yang diketahui, kita perlu mengetahui tekanan kerja yang menghasilkan daya keluaran tertentu. Nilai ini boleh ditentukan (dengan mengabaikan geseran) menggunakan formula berikut:
Tekanan = Daya ÷ Luas
Apabila menggunakan formula ini, sama ada luas dan tekanan diberikan untuk mencari daya keluaran, atau luas dan daya keluaran diketahui untuk mencari tekanan. Dalam amalan, kita biasanya mengetahui diameter lubang silinder dan perlu mengira luas omboh — namun mengira luas bulatan adalah sama mudahnya seperti mengira luas segi empat sama.
Luas bulatan bersamaan kira-kira 78.54% daripada luas segi empat sama yang sisinya sama dengan diameter bulatan tersebut. Secara lebih tepat:
Luas bulatan = Diameter^2 × 0.7854
Formula lain yang biasa digunakan:
Luas bulatan = pi × D^2 ÷ 4

Rajah 6-2 Luas bulatan = D² × 0.7854. Formula mudah ini digunakan secara berterusan dalam pengiraan silinder hidraulik.
Jarak di mana tenaga hidraulik bertindak menentukan jumlah kerja yang dilakukan — jarak ini dikenali sebagai langkah silinder. Seperti yang dinyatakan sebelumnya, penggunaan tekanan hidraulik untuk memperbesar daya kelihatan tidak menimbulkan kos apa-apa. Dalam beberapa situasi tertentu — apabila sistem berada dalam keadaan statik — satu daya kecil boleh menghasilkan daya yang sangat besar tanpa sebarang pengorbanan kelihatan. Namun, jika daya yang diperbesar ini juga menyebabkan pergerakan, maka sesuatu akan dikorbankan: jarak.
Setiap silinder hidraulik mempunyai isi padu (anjakan) yang bersamaan dengan langkahnya (inci) didarabkan dengan luas pistonnya (inci²), menghasilkan isi padu dalam inci³ (cm³).
Isi padu silinder = Luas piston × Langkah
(inci³) = (inci²) × (inci) atau (cm³) = (cm²) × (cm)
Contoh: Piston atas mesti bergerak sebanyak 2 inci (5.08 cm) untuk menggerakkan piston silinder bawah sebanyak 1 inci (2.54 cm). Kedua-dua piston melakukan kerja yang sama. Piston atas menyesarkan 20 inci³ (327.8 cm³) cecair — dan piston silinder bawah juga disesarkan oleh jumlah cecair yang sama iaitu 20 inci³ (327.8 cm³).
Kelajuan rod piston silinder hidraulik bergantung kepada kelajuan pengisian cecair ke dalam ruang di belakang piston. Formula kelajuan rod piston:
Kelajuan rod (inci/min) = Kadar aliran (gpm) × 231 ÷ Luas permukaan piston (inci²)
Kelajuan rod (m/s) = Kadar aliran (Lpm) × 0.1667 ÷ Luas permukaan piston (cm²)

Motor hidraulik ialah penggerak yang menukar tenaga hidraulik kepada tenaga mekanikal putaran. Tenaga putaran ini dikenakan kepada beban melalui aci pemacu.
Semua motor hidraulik pada asasnya terdiri daripada satu rumah dengan pelabuhan masuk dan keluar, serta satu susunan berputar yang disambungkan kepada aci pemacu.
Contoh yang ditunjukkan adalah motor hidraulik jenis bilah. Susunan berputar terdiri daripada satu rotor dan bilah-bilah yang boleh meluncur bebas masuk dan keluar dari slot-slot rotor. Susunan berputar dipasang secara eksentrik di dalam rumah; aci pemacu disambungkan kepada beban. Apabila minyak bertekanan memasuki ruang saluran masuk, tenaga hidraulik bertindak pada permukaan bilah yang terdedah dalam ruang saluran masuk. Oleh kerana luas permukaan bilah atas yang terdedah kepada minyak bertekanan lebih besar, daya yang bertindak pada rotor menjadi tidak seimbang — rotor berpusing.
Apabila minyak mencapai ruang saluran keluar dengan isipadu yang berkurangan, minyak tersebut dibuang keluar.
Nota: Sebelum motor jenis ini dapat beroperasi secara normal, bilah-bilah tersebut mesti dipanjangkan dan mesti mempunyai segel yang boleh dipercayai dengan rumah. Berbeza daripada pam hidraulik, bilah-bilah tidak boleh didorong keluar oleh daya sentrifugal — kaedah untuk memanjangkan bilah motor akan dibincangkan dalam bab seterusnya.
Rajah 6-6: Operasi motor bilah. Minyak bertekanan bertindak pada permukaan bilah. Oleh kerana luas bilah bahagian atas yang terdedah kepada tekanan lebih besar daripada luas bilah bahagian bawah, daya bersih ini memutarkan rotor.
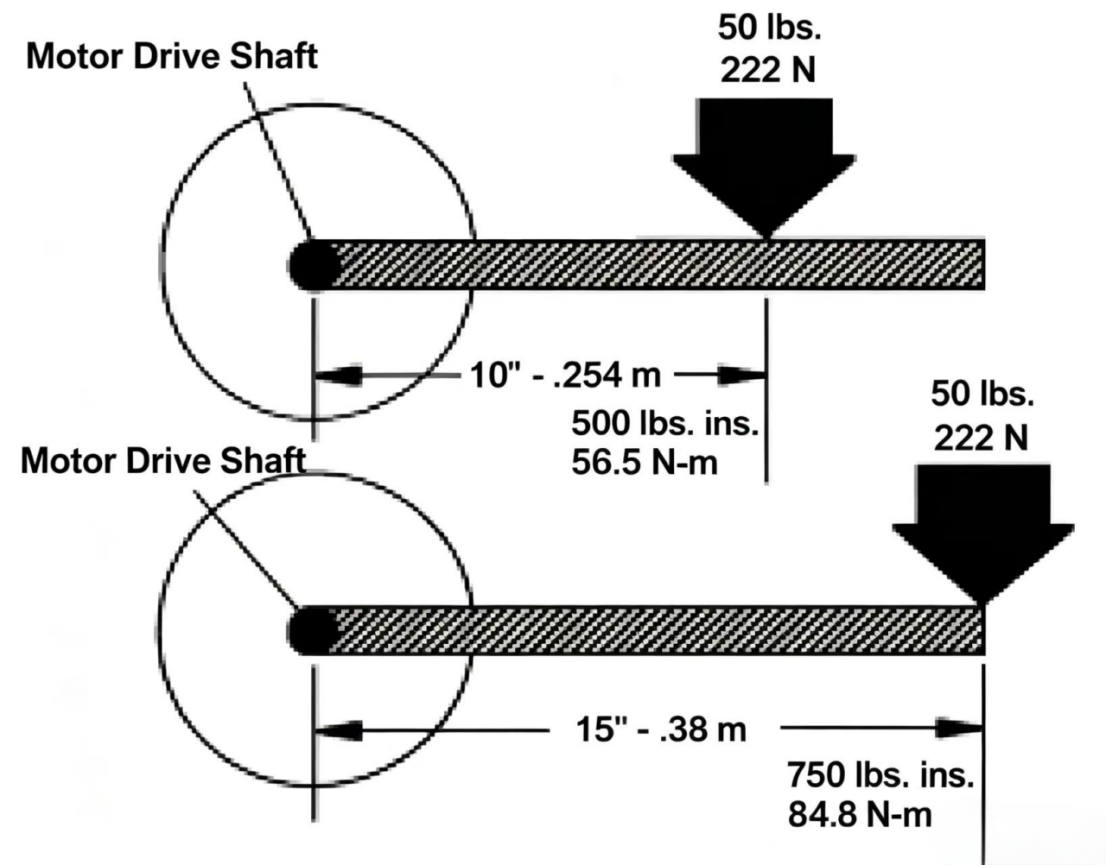
Tork ialah daya putaran atau daya memutar. Tork ialah daya yang bertindak pada jarak tertentu dari garis pusat aci. Unit tork ialah lb.in. (atau Nm).
Rumus tork memberitahu kita kedudukan daya berbanding garis pusat aci motor hidraulik. Rumus tork adalah:
Tork = Daya × Jarak dari garis pusat aci
(lb.in.) = (lb) × (in.) atau (Nm) = (N) × (m)
Contoh daripada rajah: Daya sebanyak 50 paun (222 N) bertindak pada engkol yang disambungkan ke aci motor. Jarak antara pusat aci dan daya tersebut ialah 10 inci (0,254 m). Daya kilas yang dihasilkan pada aci ialah 500 inci-paun (56,5 Nm). Jika daya yang sama sebanyak 50 paun (222 N) bertindak sepanjang lengan engkol sepanjang 15 inci (0,38 m), daya kilas pada aci menjadi 750 inci-paun (84,6 Nm). Semakin jauh daya bertindak dari pusat aci, semakin besar daya kilas yang dihasilkan. Perlu diperhatikan bahawa daya kilas tidak melibatkan sebarang pergerakan.
Beban yang disambungkan ke aci pemacu motor menghasilkan daya kilas seperti yang diterangkan di atas. Bagi motor hidraulik, ini merupakan rintangan — ianya mesti diatasi oleh tekanan hidraulik yang bertindak pada susunan berputar motor.
Daya kilas (inci-paun) = psi × Isipadu motor (inci³) ÷ (2 × π)
Daya kilas (Nm) = bar × Isipadu motor (cm³) ÷ (20 × π)
Kelajuan aci motor hidraulik ditentukan oleh kelajuan injeksi bendalir. Rumusnya ialah:
Kelajuan motor (rpm) = Kadar aliran (gpm) × 231 ÷ Isipadu motor (inci³/rev)
Kelajuan motor (rpm) = Kadar aliran (Lpm) × 1000 ÷ Isipadu anjakan motor (ml/rev)
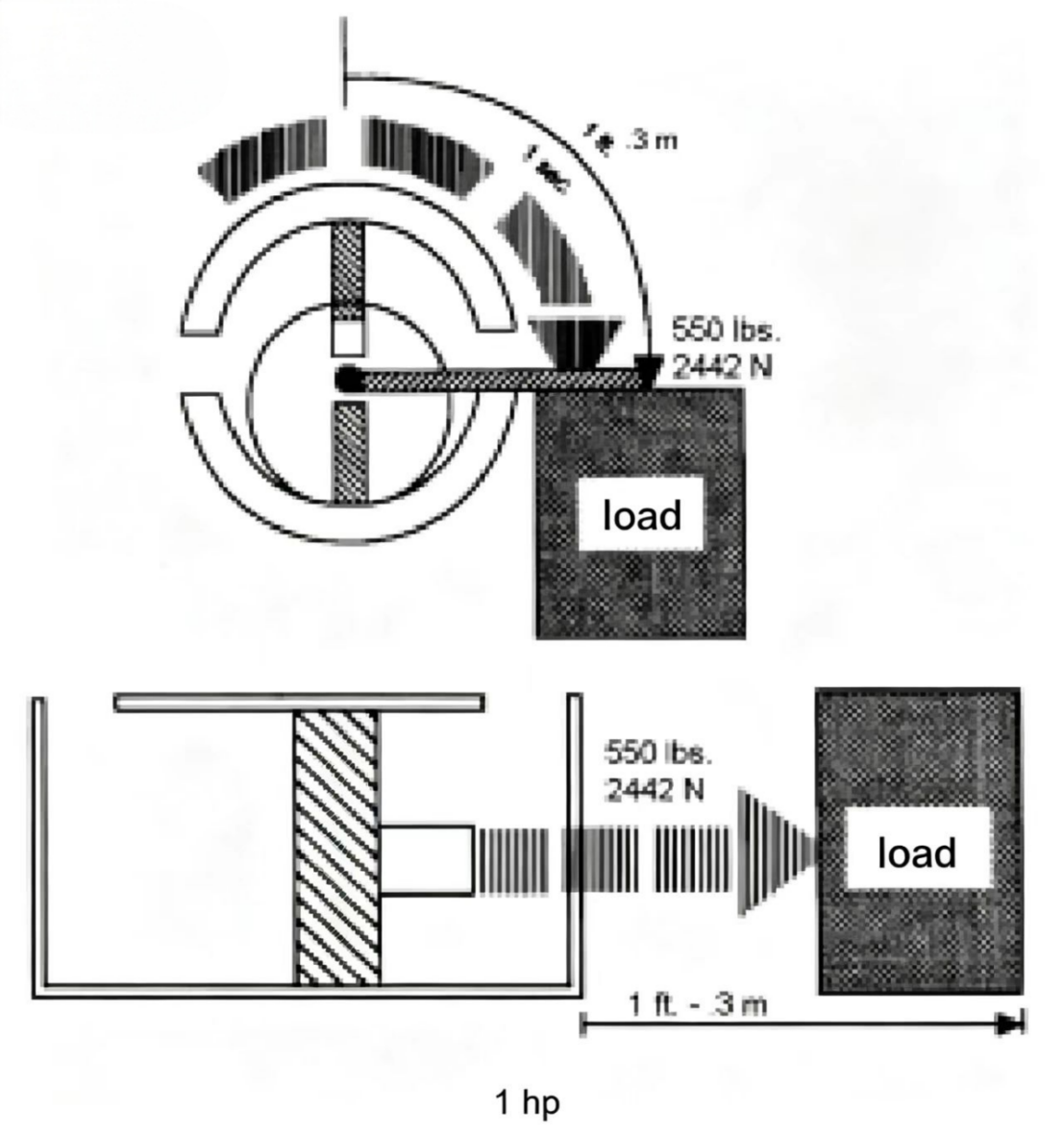
Dalam bab-bab sebelumnya, kita telah mempelajari bahawa kuasa ialah kadar melakukan kerja, iaitu hp = ft.lbs/masa, atau W = J/masa.
Kita juga mengetahui bahawa daya kuda (hp) atau watt (W) ialah unit kuasa. Jika satu silinder hidraulik atau motor hidraulik menggerakkan beban dengan daya mekanikal sebanyak 550 lbs (2,442 N) dan menggerakkannya sejauh 1 kaki (0,30 m) dalam masa 1 saat, maka ia telah menggunakan kuasa sebanyak 1 hp (746 W). Jika kerja yang sama (550 ft.lbs / 746 J) dilakukan dalam masa setengah saat, kelajuan kerja menjadi dua kali ganda dan kuasa menjadi 2 hp (1,490 W).
Kuasa mekanikal yang dipindahkan oleh satu silinder atau motor kepada beban adalah sama dengan kuasa hidraulik yang diperlukan oleh silinder atau motor tersebut. Bagi satu sistem hidraulik yang melakukan kerja pada kadar 550 kaki-paun per saat (746 J), kuasa hidrauliknya ialah 1 hp (746 W). Namun, dalam formula kuasa mekanikal, "kaki (m)" dan "paun (N)" digantikan dengan istilah hidraulik "psi (bar)" dan "gpm (Lpm)". Suatu faktor penukaran digunakan dalam pengiraan kuasa hidraulik untuk mengungkapkan hubungan antara gpm, psi, kaki, dan paun (atau Lpm, bar, m, N).
Untuk mengira kuasa satu silinder hidraulik atau keseluruhan sistem hidraulik:
hp = gpm × psi × 0.000583
W = hp × 746
W = (5/3) × Lpm × bar
Untuk mengira kuasa output motor hidraulik:
hp = rpm × Tork (paun-inci) ÷ 63,025
kW = rpm × Tork (Nm) ÷ 9,543
Sehingga kini, kami telah membincangkan motor hidraulik dengan output putaran dan silinder hidraulik dengan output linear. Kini, kami akan membincangkan jenis aktuator lain yang menghasilkan putaran sudut terhad, iaitu silinder berayun atau motor berayun. Strukturnya padat, ringkas, dan cekap—ia menghasilkan tork tinggi serta hanya memerlukan ruang pemasangan yang kecil, dengan pemasangan yang mudah.
Aktuator berayun digunakan dalam pengindeksan alat mesin, operasi pembengkokan, pengangkatan atau pemutaran objek berat, pembalikan, penentuan kedudukan, kelengkapan pemesinan, kawalan kelautan, pengendalian injap, dan sebagainya.
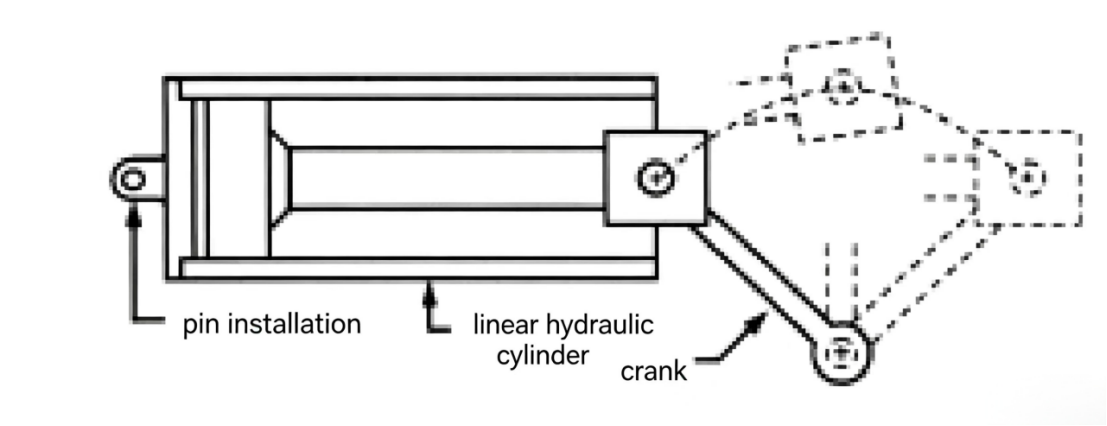
Terdapat pelbagai jenis silinder berayun. Yang paling ringkas ialah mekanisme berayun yang dipacu oleh silinder hidraulik linear, di mana hujung badan silinder dipasang dengan pin, manakala batang piston disambungkan kepada engkol yang memacu aci untuk berputar. Silinder berayun ini boleh dikawal melalui injap arah empat-hala, dengan suis had pada setiap hujung langkah.
Seperti semua peranti mekanikal, penggerak berayun berbasis silinder linear ini mempunyai beberapa ciri asas, termasuk keupayaannya dipasang daripada komponen piawai yang tersedia di pasaran, memberikan keluwesan yang besar kepada pereka serta mengekalkan kos rendah dengan suku cadang yang mudah diperoleh.
Namun, jenis penggerak berayun ini juga mempunyai ciri-ciri yang tidak diingini: rod piston tidak dilindungi dan bersentuhan secara langsung dengan persekitaran sekeliling, terutamanya kerana mekanisme engkol biasanya tidak kedap, mencipta risiko keselamatan. Selain itu, aci pemacu biasanya menanggung beban sisi yang besar, menyebabkan kegagalan awal, haus berlebihan, dan terkunci.
Bagi jenis penggerak berayun khusus ini, silinder hidraulik mesti bebas berayun, jadi ia mesti menggunakan sambungan hos fleksibel, dan sepanjang langkah silinder, tork outputnya tidak tetap.
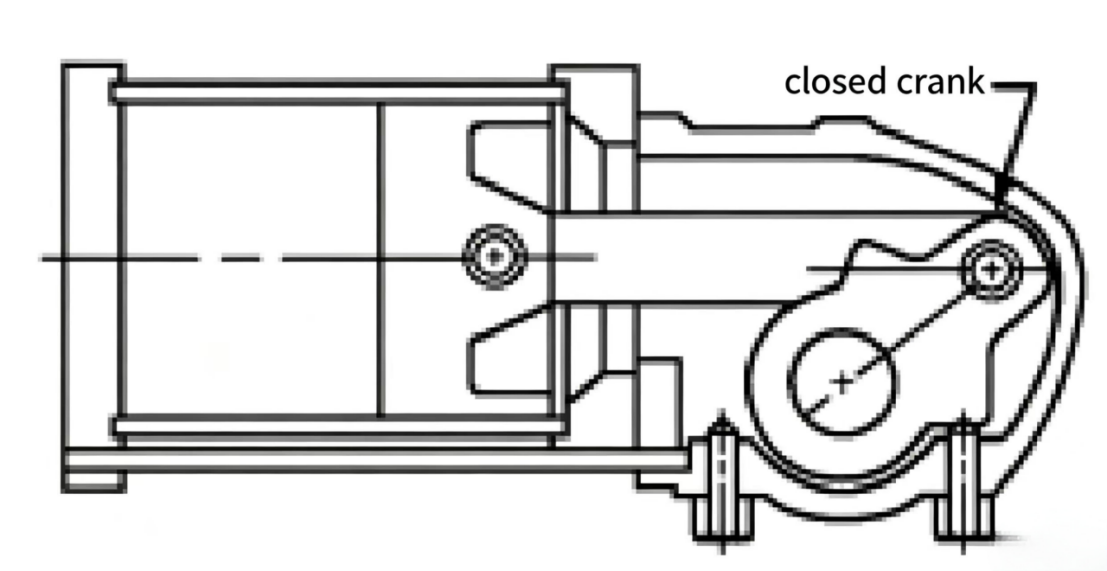
Silinder berayun tertutup yang dilampirkan ini sangat mirip dengan mekanisme berayun berbasis silinder linear di atas. Silinder tertutup ini mempunyai penutup pelindung yang melindungi batang piston dan engkol. Acuan pemacu biasanya mempunyai sokongan bantalan tambahan untuk mengelakkan beban sisi yang terlalu berat. Jenis ini boleh dipasang dengan injap solenoid, suis had, atau suis langkah. Julat langkah biasanya boleh dilaraskan antara kira-kira 85° hingga 100°.
Jenis lain ialah silinder berayun kembali-oleh-pring, yang menggunakan silinder hidraulik dengan pring kembali untuk mengembalikan acuan pemacu ke kedudukan asalnya. Silinder berayun kembali-oleh-pring boleh menghasilkan daya kilas sehingga 5,000 inci-paun (565 Nm).

Silinder berayun yang paling biasa ialah jenis gerigi-dan-pinion. Jenis ini mampu mengekalkan tork output malar dalam kedua-dua arah sepanjang putaran penuh. Dalam konfigurasi ini, tekanan hidraulik bertindak ke atas omboh, menolak gerigi yang disambungkan kepada omboh tersebut, yang seterusnya memutar gear pinion untuk memutarkan aci. Silinder gerigi-dan-pinion piawai mempunyai langkah putaran sebanyak 90°, 180°, 360°, atau malah lebih besar lagi. Tork output silinder gerigi-dan-pinion boleh mencapai 52,000,000 inci-penumbuk (5,876,000 Nm).

Terdapat juga motor berayun bilah yang tersedia. Jenis ini boleh berupa bilah tunggal atau bilah pelbagai. Motor bilah tunggal boleh berputar sehingga 280°; manakala motor bilah dwi boleh berputar sehingga 200°. Tork output motor bilah dwi adalah dua kali ganda tork output motor bilah tunggal. Jenis motor berayun ini mampu mencapai tork output sehingga 500,000 inci-penumbuk (Nm).

Terdapat jenis motor berayun lain yang menjana tork menggunakan mekanisme takal heliks. Perubahan pada panjang dan picitan takal membolehkan ayunan putaran berubah dalam julat yang luas. Jenis motor berayun ini mempunyai satu aci takal heliks dengan selongsong piston bertakal dalaman di atas aci tersebut — putaran selongsong piston dibataskan oleh batang panduan. Apabila selongsong piston bergerak di dalam silinder, ia memacu aci takal untuk berputar. Ayunan putaran piawai ialah 90°, 180°, 270°, dan 360°, dengan tork keluaran sehingga 1,000,000 inci-paun (13,000 Nm).
Motor berayun rantaian-dan-takal menggunakan piston, rantaian, dan takal untuk memacu aci. Penggerak ini biasanya mempunyai satu piston besar (sebagai peranti pemacu) untuk menarik rantaian, dan satu piston kecil untuk mengelakkan minyak daripada terlepas melalui laluan rantaian balik. Tork keluaran boleh mencapai kira-kira 23,000 inci-paun (2,599 Nm), manakala putaran aci pemacu boleh mencapai lima pusingan penuh atau 1,800°.
Untuk memilih silinder berayun yang paling sesuai bagi suatu aplikasi tertentu, faktor-faktor seperti tork, kelajuan, dan kaedah pengendalian semuanya perlu dipertimbangkan. Pemilihan motor berayun sebenar akan dihuraikan dalam bab lain, serta perbincangan lanjut mengenai cara menentukan sama ada jenis satu-arah atau dua-arah, sama ada menggunakan penentududukan gelung tertutup, sama ada penampan diperlukan, dan sebagainya. Frekuensi pengendalian atau tempoh kitaran juga akan dikaji.
Kelajuan aktuator merupakan fungsi kadar aliran (gpm (L/min))
Kelajuan linear rod piston silinder hidraulik bergantung kepada kelajuan di mana pam memasukkan cecair ke dalam ruang piston silinder (gpm (L/min)). Kelajuan putaran aci pemacu motor hidraulik bergantung kepada kadar aliran (gpm (L/min)) yang dimasukkan ke dalam motor hidraulik.
Daya output aktuator merupakan fungsi tekanan (psi (bar))
Daya output suatu silinder diungkapkan dalam psi (bar) — daya output pada aci pemacu motor ditentukan oleh tekanan yang bertindak ke atas kawasan terdedah susunan berputar motor. Kuasa yang dihasilkan oleh suatu penggerak adalah fungsi kelajuan penggerak didarab dengan daya output penggerak.
Bagi silinder, daya output diungkapkan dalam psi, dan kelajuan batang piston dalam gpm. Pemalar 0,000583 menghuraikan hubungan antara psi, gpm, dan kuasa. Bagi motor, daya output diungkapkan dalam tork, dan kelajuan operasi motor dalam rpm. Pemalar 63.025 menghuraikan hubungan antara rpm, tork, dan kuasa.

Selamat datang di Hovoo, sebuah kilang meterai China. pengeluaran PU, getah dan meterai PTFE. meterai termasuk O-ring, meterai piston, meterai batang, ring kelabu dan meterai gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}