33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]

Injap kawalan hidraulik ialah komponen mekanikal yang terdiri daripada badan injap dengan saluran dalaman yang boleh menyambung atau menghalang aliran cecair, serta bahagian bergerak dalaman. Saluran dalam badan digunakan untuk mengangkut minyak. Tindakan bahagian bergerak dalaman mengawal tekanan maksimum, arah aliran, dan kadar aliran sistem.
Tenaga hidraulik boleh diaplikasikan kepada silinder hidraulik. Apabila hasilnya berjaya, kerja dikatakan selesai apabila silinder sepenuhnya terentang. Pam berpindahan positif akan terus menyerap lebih banyak tenaga daripada penggerak utamanya. Ini menghasilkan tekanan yang lebih tinggi dalam minyak. (Nota: rintangan minimum dalam sistem menentukan tekanan hidraulik yang dikenakan.) Apabila silinder terentang lebih jauh, kekuatan fizikal sistem menjadi rintangan minimum.
Pam akan menambahkan lebih banyak tekanan untuk mengatasi rintangan ini. Pengguna menggunakan injap kawalan tekanan bagi mengekalkan tekanan sistem dalam julat yang selamat.
Bahagian-bahagian bergerak dalaman injap kawalan tekanan beroperasi berdasarkan tekanan. Apabila tekanan sistem mencapai nilai tertentu yang telah ditetapkan, bahagian-bahagian bergerak dalaman tersebut akan menyambung atau menghalang salah satu saluran dalam badan injap, menyebabkan minyak mengalir atau menghalang aliran minyak ke saluran tersebut.
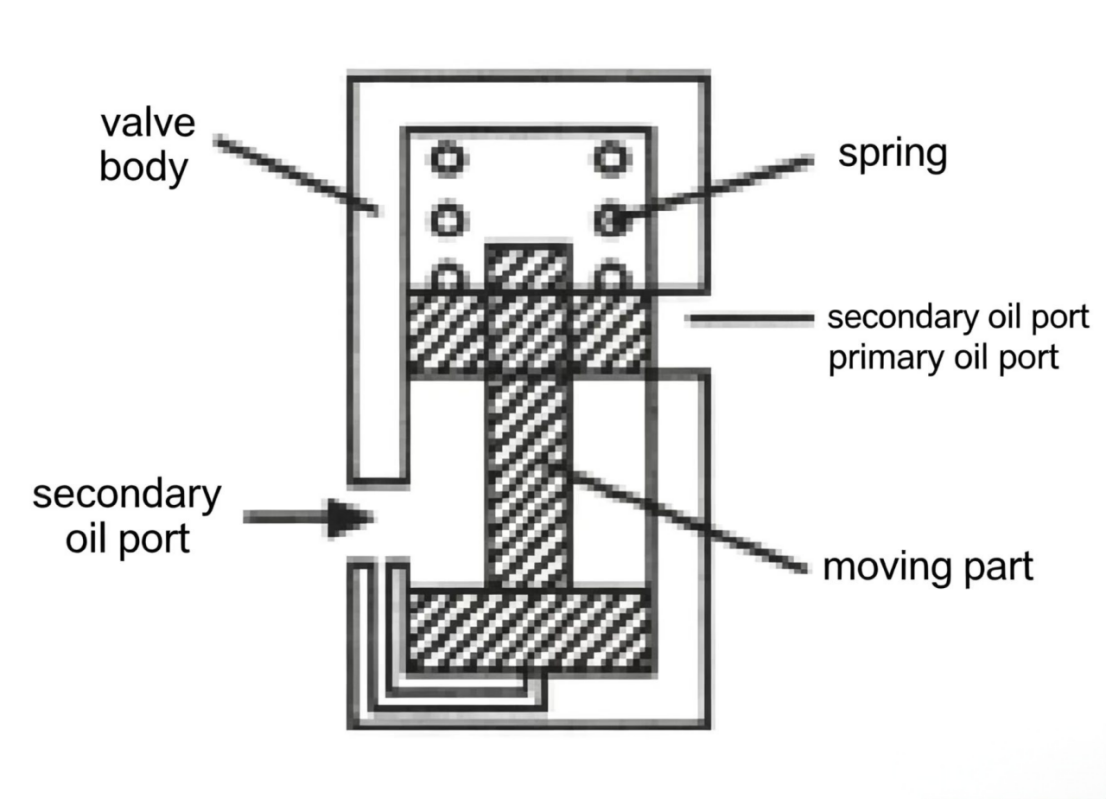
Injap kawalan tekanan terdiri daripada badan injap dengan saluran utama dan sekunder serta bahagian bergerak dalaman (spul). Sambungan luaran ke saluran-saluran ini dipanggil pelabuhan utama dan pelabuhan sekunder.
Bahagian bergerak dalaman injap kawalan tekanan biasanya merupakan peranti jenis spul. Apabila spul berada di satu hujung kedudukan, saluran dalaman bersambung dan aliran boleh melaluinya. Apabila berada di hujung kedudukan yang lain, saluran dalaman terhalang dan aliran melalui injap terputus.
Dalam injap kawalan tekanan, spul ditekan oleh spring ke satu hujung kedudukan. Pada kedudukan tertutup normal ini, saluran dalaman terhalang dan laluan aliran melalui injap tertutup. Jenis ini dipanggil injap kawalan tekanan tertutup normal.
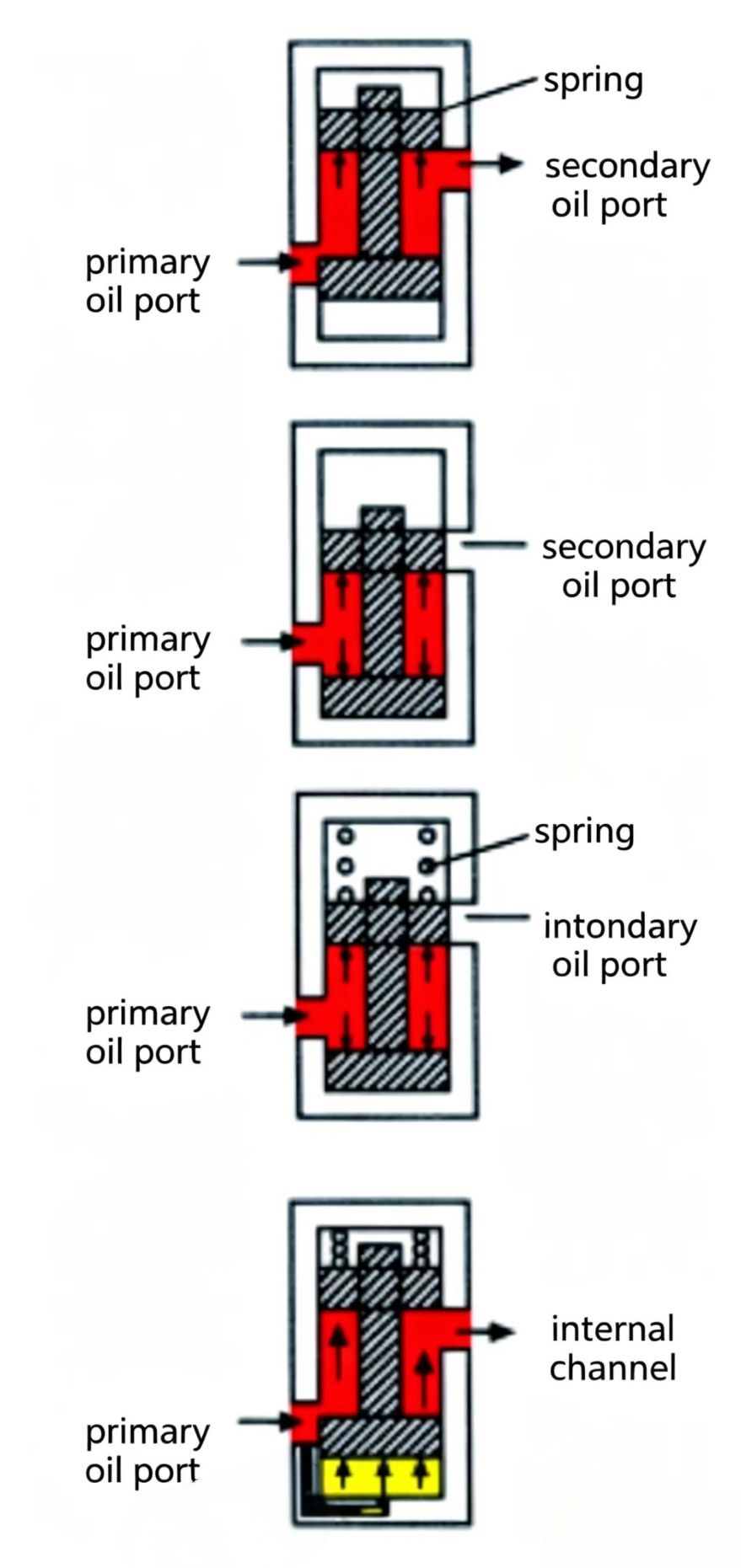
Injap kawalan tekanan mengesan tekanan di bahagian bawah spul. Laluan bawah ini disambungkan ke pelabuhan utama. Apabila tekanan sistem meningkat melebihi daya spring, spul bergerak untuk menyambungkan laluan dalaman, membenarkan aliran melalui injap.
(Tekanan hidraulik yang digunakan untuk mengawal pergerakan spul dipanggil tekanan pilot. Penggunaan tekanan pilot untuk mengawal injap dipanggil kawalan pilot dan merupakan kaedah paling biasa untuk mengawal semua jenis injap hidraulik.)
Jika pelabuhan utama injap kawalan tekanan jenis ini disambungkan ke bahagian tekanan sistem, dan apabila tekanan yang dikenakan oleh pam terlalu tinggi, aliran dari pam boleh dialihkan melalui injap ini ke tangki minyak — injap kawalan tekanan jenis tertutup secara normal ini dipanggil injap pelepasan.
Rajah 7-2: Injap kawalan tekanan jenis tertutup secara normal (operasi injap pelepasan). Spring menahan spul dalam keadaan tertutup sehingga tekanan sistem melebihi tetapan spring, kemudian spul berpindah dan membuka laluan ke tangki.
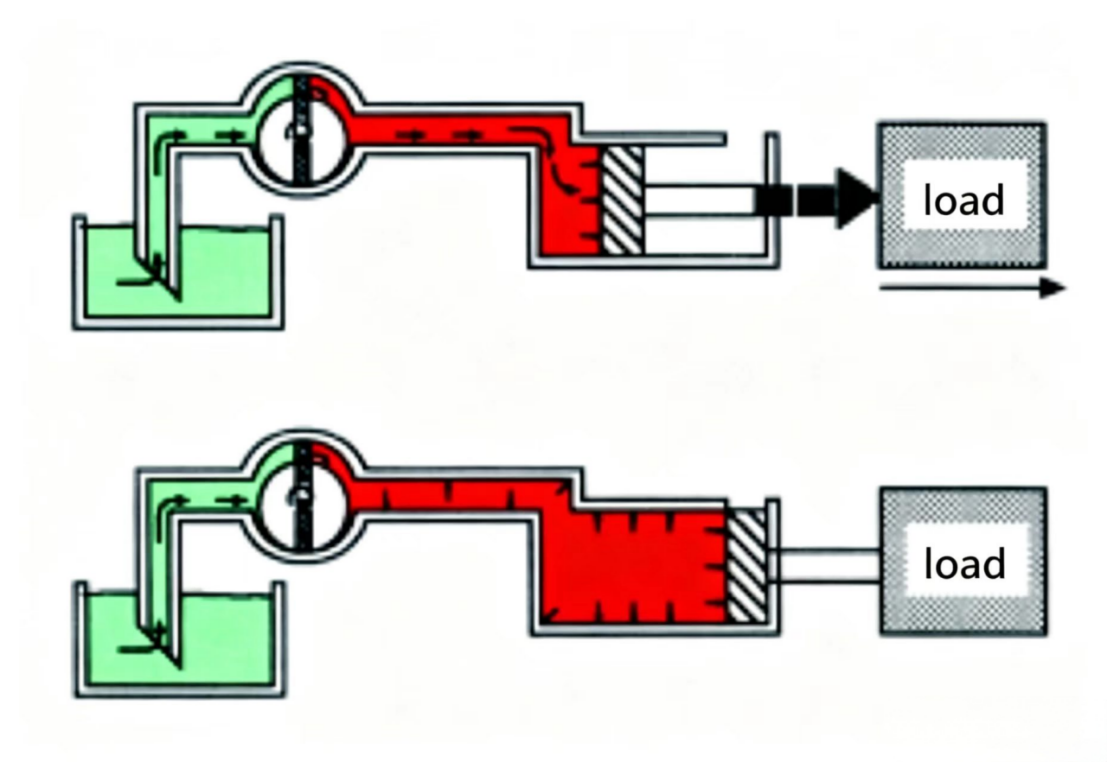
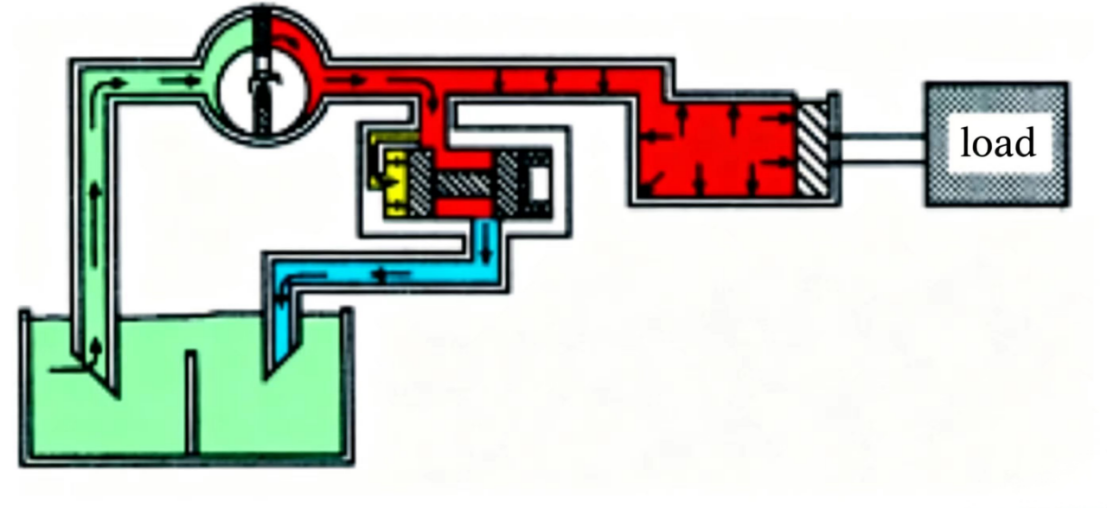
Rajah 7-3: Litar hidraulik ringkas dengan kawalan tekanan (injap pelepasan). Apabila silinder mencapai hujung langkah, injap pelepasan terbuka dan mengalihkan aliran pam kembali ke tangki, seterusnya menghadkan tekanan maksimum sistem.
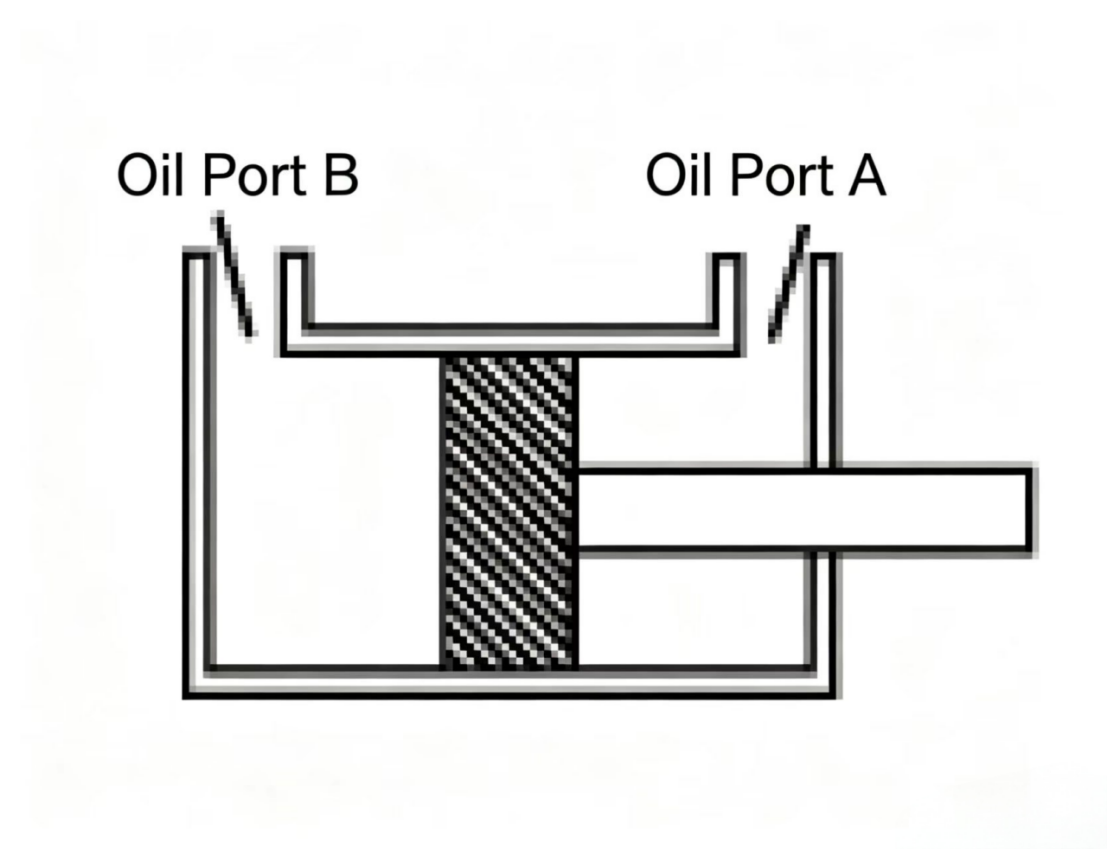
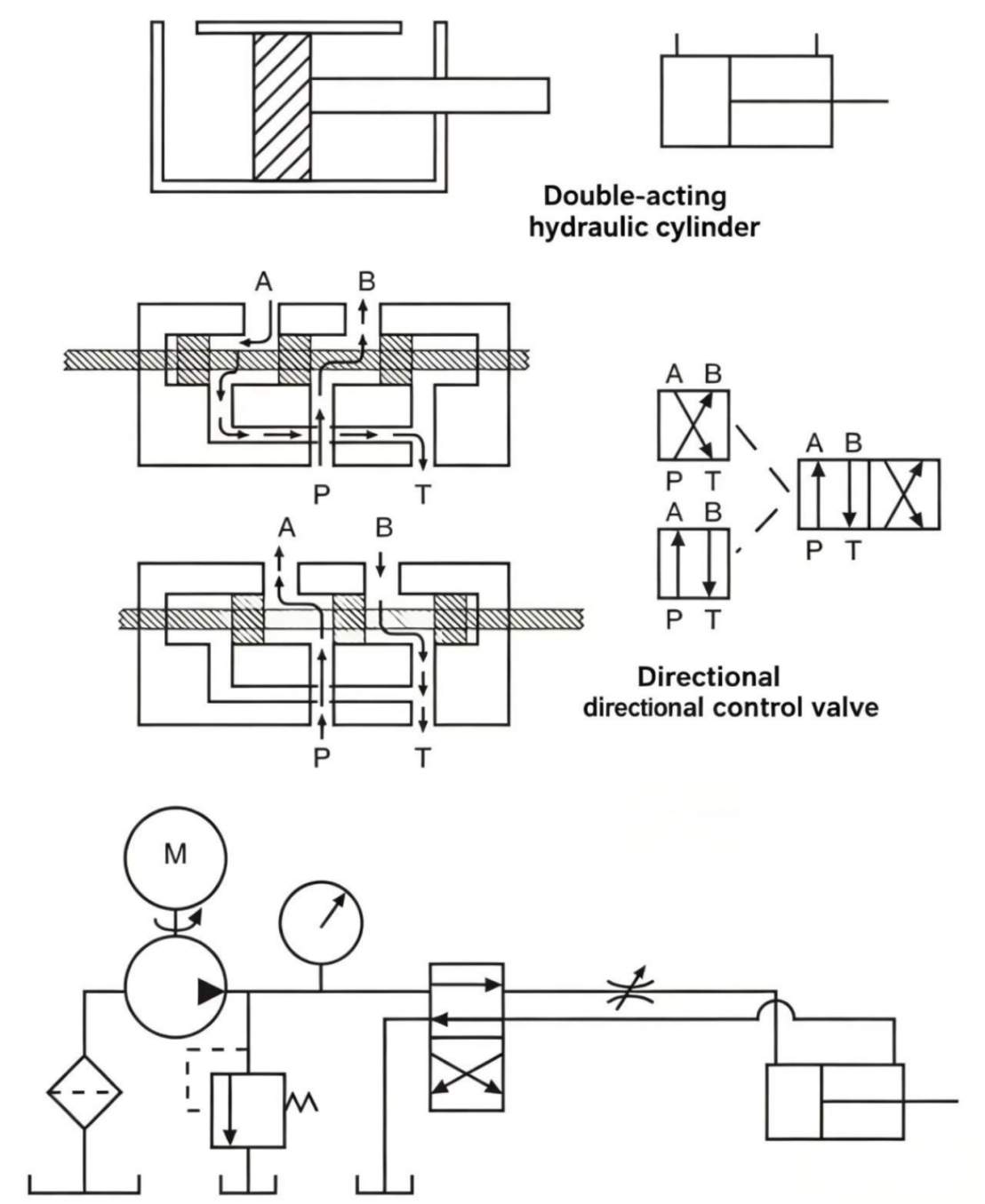
Setelah silinder hidraulik sepenuhnya diregangkan, ia mesti ditarik semula supaya kerja boleh dilakukan sekali lagi. Oleh sebab itu, silinder yang perlu bergerak dalam dua arah biasanya menggunakan silinder hidraulik dengan dua lubang — iaitu silinder dwi-tindakan. Arah aliran mesti dipulangkan pada masa yang sama.
Silinder hidraulik dwi-tindakan mempunyai satu lubang di setiap hujung badan silinder, membolehkan minyak masuk dan keluar, sehingga omboh boleh bergerak dalam kedua-dua arah (dwi-tindakan). Untuk membezakan dua lubang pada silinder dwi-tindakan, kita melabelkan satu lubang sebagai "A" dan lubang yang lain sebagai "B".
Bahagian-bahagian dalaman yang bergerak pada injap kawalan arah berfungsi untuk menyambung atau menghalang laluan dalaman badan injap, seterusnya mengawal arah aliran minyak.
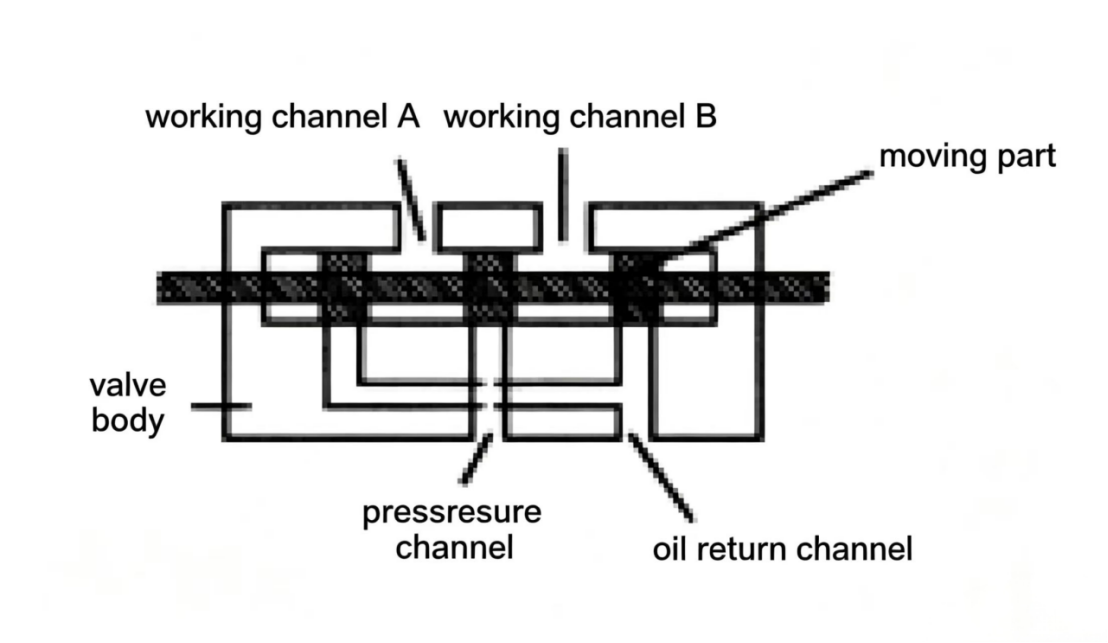
Injap kawalan berarah lazim mempunyai empat saluran dalaman dalam badan injap dan spul gelangsar yang boleh menyambung atau menghalang saluran-saluran ini.
Apabila spul berada pada satu hujung kedudukan, saluran tekanan disambungkan kepada saluran kerja A, dan saluran pulangan disambungkan kepada saluran kerja B. Apabila spul beralih ke hujung kedudukan yang lain, saluran tekanan disambungkan kepada saluran kerja A, dan saluran pulangan disambungkan kepada saluran kerja B. Perubahan arah spul akan menukar arah aliran minyak ke dalam silinder hidraulik.
Apabila batang silinder melanjut sepenuhnya dan menarik balik sebagaimana diperlukan, kerja dianggap selesai. Ap apabila spul beralih ke hujung kedudukan yang lain, minyak mengalir ke sisi lain silinder — dan batang silinder menarik balik.
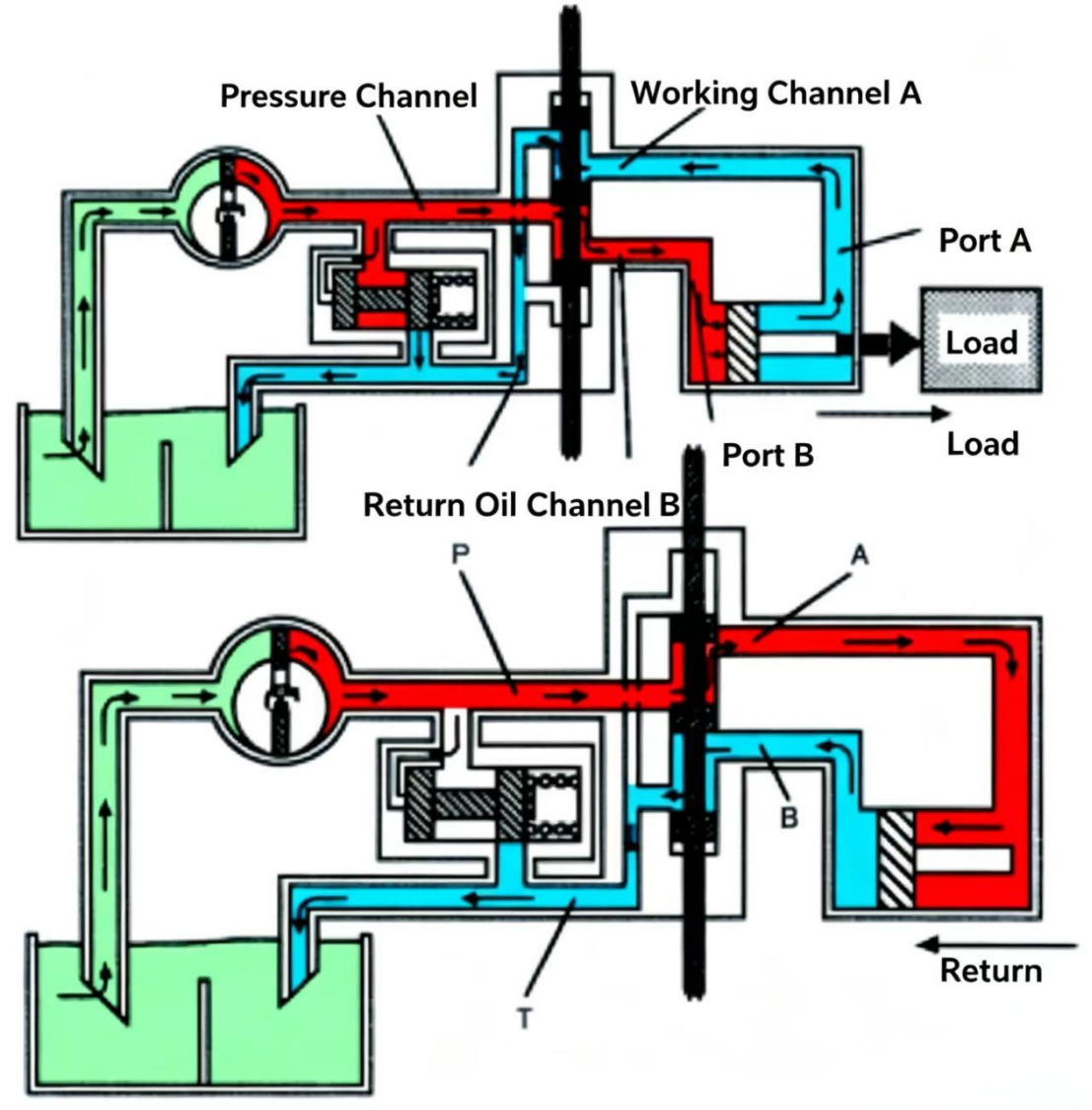
Rajah 7-4: Injap kawalan berarah dalam litar silinder dwi-tindakan. Perubahan kedudukan spul akan membalikkan arah aliran minyak, yang seterusnya membalikkan gerakan silinder.
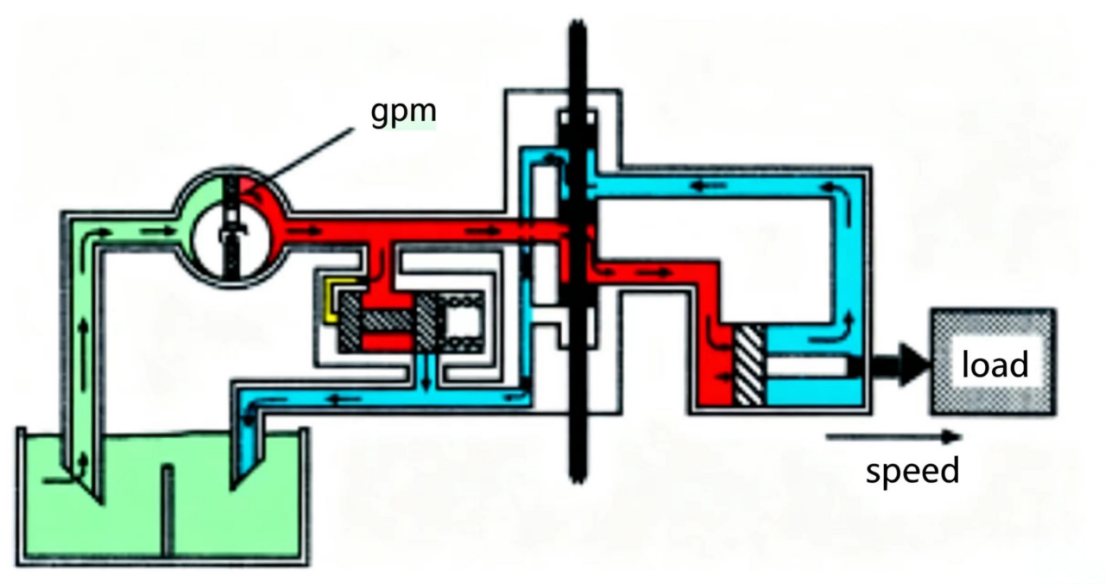
Dalam banyak aplikasi, kelajuan operasi aktuator mesti dikawal dan kadang-kadang dikawal dengan sangat tepat. Seperti yang dijelaskan sebelum ini, kelajuan aktuator (silinder, motor hidraulik) berkaitan secara langsung dengan kadar injeksi minyak — kelajuan aktuator ditentukan oleh kadar aliran masuk.
Memandangkan sesaran pam boleh ditetapkan, adalah mungkin untuk memilih kadar aliran pam berdasarkan kelajuan aktuator yang diperlukan. Ini hanya boleh dilaksanakan dalam sistem yang menggunakan satu aktuator sahaja.
Kebiasaannya dalam sistem hidraulik, terdapat lebih daripada satu aktuator. Jika sistem memerlukan setiap silinder hidraulik beroperasi secara bebas, kadar aliran pam harus dipilih berdasarkan silinder hidraulik terbesar yang memerlukan kelajuan paling tinggi. Ini bermaksud aktuator yang lebih kecil akan bergerak lebih laju, yang mungkin tidak diingini. Untuk mengurangkan aliran yang memasuki aktuator-aktuator ini atau mana-mana aktuator lain, injap kawalan aliran mesti digunakan.
Apabila menggunakan injap kawalan aliran, sentiasa mungkin untuk mengurangkan aliran dari pam ke aktuator.
Injap kawalan aliran lazim terdiri daripada badan injap dan bahagian yang boleh bergerak. Dalam contoh kami, bahagian yang boleh bergerak ialah jarum pelarasan berhujung tirus. Oleh kerana jarum tersebut sebenarnya tidak bergerak semasa operasi (ia telah ditetapkan pada kedudukan tertentu terlebih dahulu), maka lebih tepat untuk menyebut bahagian yang boleh bergerak pada injap kawalan aliran sebagai "boleh laras" berbanding "bergerak".
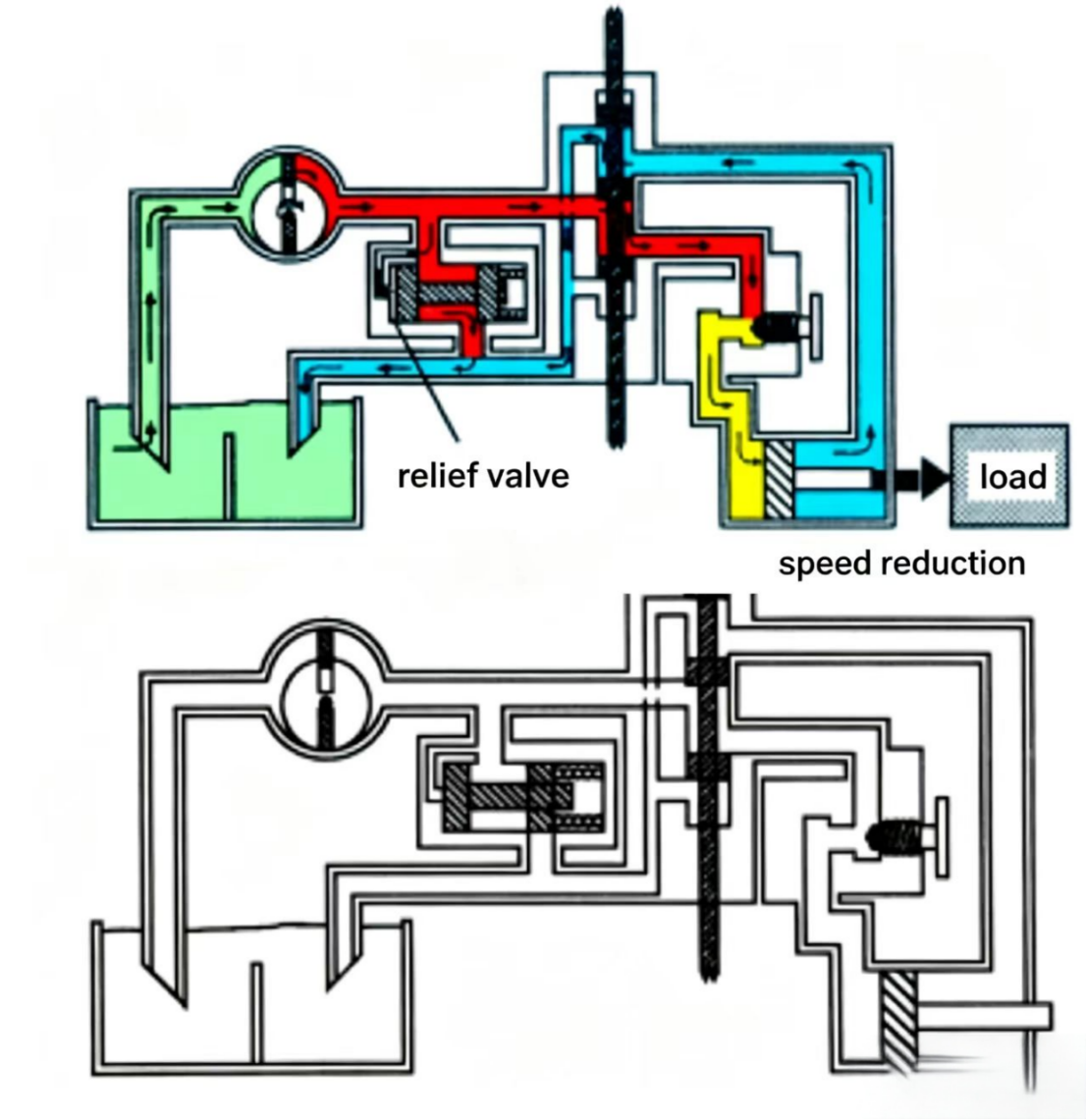
Dalam sistem hidraulik, injap kawalan aliran sentiasa beroperasi bersama injap kawalan tekanan (pelindung). Injap kawalan aliran bertindak sebagai rintangan. Ia menyebabkan pam hidraulik menghasilkan tekanan yang lebih tinggi. Tekanan ini boleh menyebabkan sebahagian aliran dari pam membuka injap pelindung, seterusnya mengurangkan aliran melalui injap kawalan aliran dan mencapai penggerak.
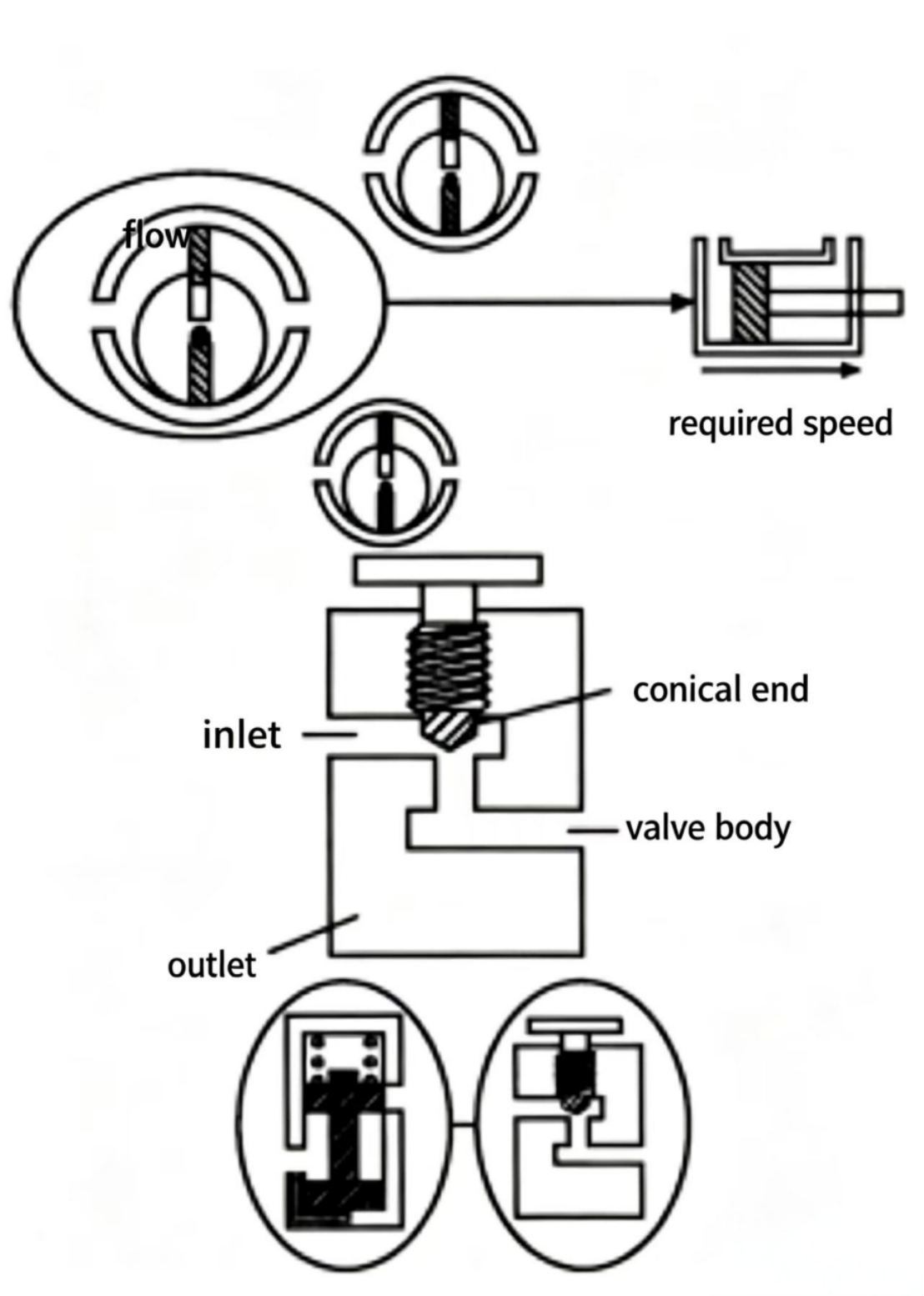
Rajah 7-5: Litar kawalan aliran. Injap jarum menghadkan aliran ke silinder. Aliran berlebihan dari pam dialirkan melalui injap pelindung ke tangki. Bukaaan injap jarum menentukan kelajuan silinder.
Semua komponen yang diperkenalkan di atas boleh membentuk satu sistem hidraulik yang ringkas. Memandangkan tenaga hidraulik dalam sistem ini boleh dikawal, sistem ini mampu menjalankan kerja yang berguna.
Sistem hidraulik digunakan secara meluas dalam banyak bidang, dari penerbangan angkasa lepas, pesawat, dan peralatan tentera hingga ke peralatan industri, jentera berjalan, dan peralatan keluli. Prinsip kerja sistem hidraulik dalam semua aplikasi ini adalah sama seperti yang diterangkan di atas. Perbezaan tunggal antara pelbagai "jenis" sistem hidraulik terletak pada komponen-komponen yang digunakan.
Dalam bab-bab seterusnya, kita akan membincangkan secara terperinci pelbagai jenis komponen — iaitu komponen yang digunakan dalam sistem hidraulik industri. Untuk menerangkan cara menggunakan komponen-komponen ini, kita juga akan mereka litar hidraulik asas.
Dalam perbincangan sebelumnya mengenai komponen hidraulik dan sistem asas, semua perkara dijelaskan secara grafik — menggunakan pandangan keratan rentas untuk menunjukkan tindakan dalaman komponen secara visual. Kaedah ini berguna untuk menjelaskan masalah, tetapi tidak praktikal dari perspektif kerja harian.
Seperti bidang teknikal lain, hidraulik juga menggunakan simbol grafik untuk mewakili komponen dan sistem. Pelbagai komponen hidraulik dan sistem ringkas yang dibincangkan sebelumnya semuanya boleh diwakili dengan menggunakan simbol grafik hidraulik dan pneumatik piawaian ANSI Y32.10 atau ISO 1219.
Selain komponen yang telah dibincangkan, komponen yang membentuk sistem hidraulik juga termasuk motor elektrik, penapis hidraulik, dan sebagainya. Sistem hidraulik biasanya dipacu oleh motor elektrik. Selain itu, untuk mengekalkan tahap kebersihan yang munasabah, sistem hidraulik harus menggunakan penapis hidraulik bagi melindungi minyak daripada pencemaran.
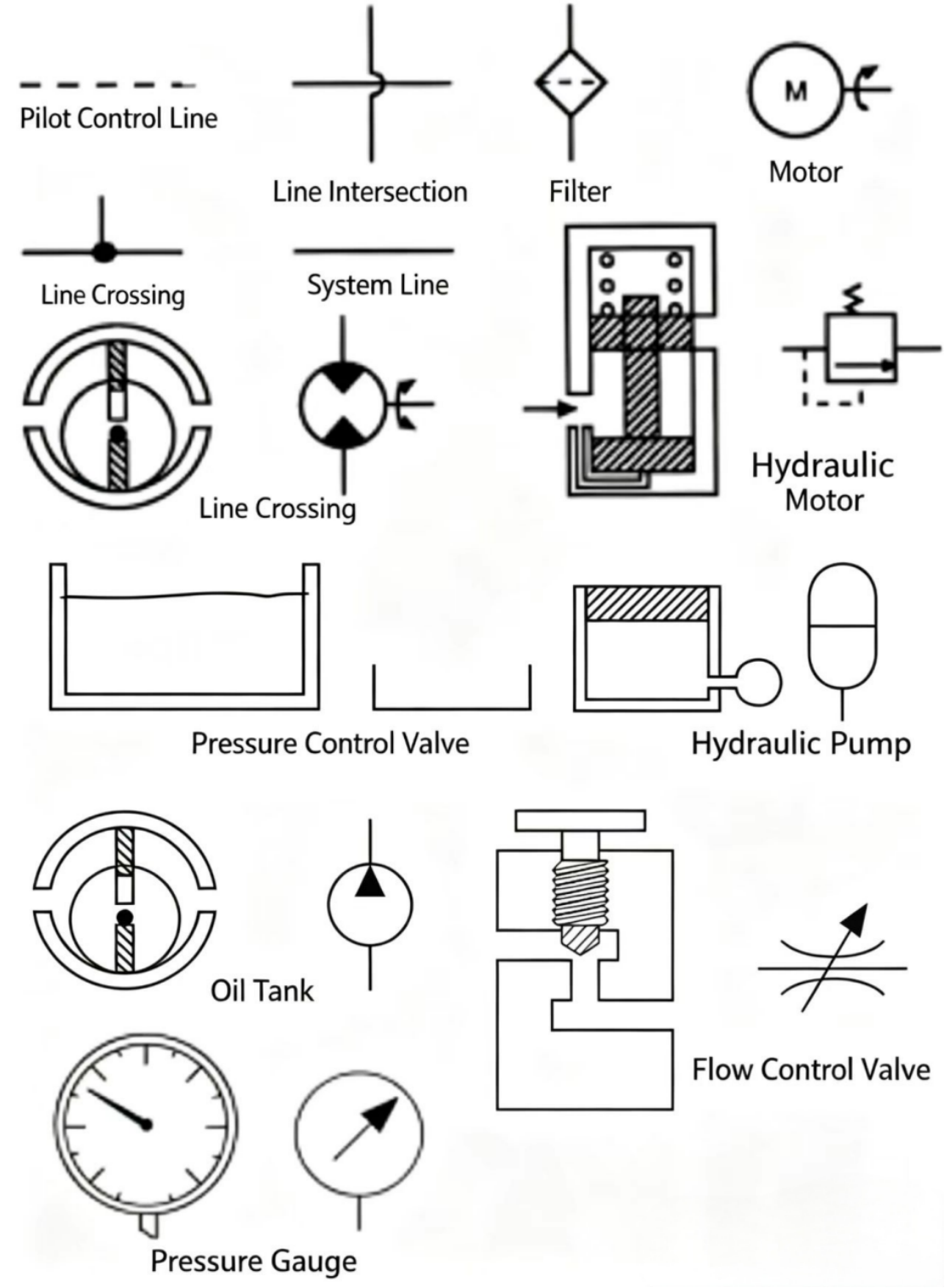
Rajah 7-7 Simbol grafik hidraulik piawai (ANSI Y32.10 / ISO 1219). Simbol-simbol ini digunakan pada semua gambar rajah skematik litar hidraulik sebagai ganti daripada lukisan keratan rentas.
Rajah 7-8 Satu litar hidraulik ringkas yang lengkap, ditunjukkan dengan menggunakan simbol grafik piawai. Inilah cara litar hidraulik dilukis dalam amalan kejuruteraan.

Selamat datang di Hovoo, sebuah kilang meterai China. pengeluaran PU, getah dan meterai PTFE. meterai termasuk O-ring, meterai piston, meterai batang, ring kelabu dan meterai gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}