33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]

Secara teori, setiap pemecah batu hidraulik memerlukan akumulator tekanan berubah-ubah — khususnya akumulator tekanan tinggi bersaiz besar.
Akumulator tekanan tinggi, yang dipasang di saluran masuk sistem pemecah batu hidraulik, mempunyai tiga fungsi:
(1) Untuk menyeimbangkan kelimpahan dan kekurangan bekalan sistem serta penggunaan minyak. Apabila aliran keluar pam melebihi penggunaan minyak sistem, akumulator tekanan tinggi menyerap aliran keluar berlebihan tersebut dan bertindak sebagai peranti penyimpanan minyak. Apabila aliran keluar pam kurang daripada penggunaan minyak sistem, akumulator ini mengalirkan minyak untuk mengimbangi kekurangan tersebut dan bertindak sebagai peranti pelepasan minyak. Akumulator tekanan tinggi memainkan peranan penting dalam menyeimbangkan kelimpahan dan kekurangan aliran dalam sistem, serta merupakan komponen utama bagi operasi sistem yang stabil.
(2) Untuk menyerap fluktuasi tekanan sistem dan mengurangkan hentakan tekanan kecil, melindungi paip dan komponen hidraulik serta meningkatkan jangka hayatnya.
(3) Dalam rekabentuk mekanisme impak hidraulik menggunakan teori pemboleh ubah abstrak, ia membantu dalam merealisasikan daya setara. Selagi akumulator direkabentuk dengan betul, daya setara yang tepat boleh diperoleh, memastikan sistem mencapai kinematik dan dinamik yang diperlukan.
Memandangkan peranan penting akumulator tekanan tinggi dalam sistem pemecah batu hidraulik — dan khususnya fungsi istimewanya dalam memastikan sistem mencapai kinematik dan dinamik yang diperlukan — maka penubuhan teori dan kaedah rekabentuk akumulator tekanan tinggi yang betul adalah sangat penting.
Isipadu pelepasan berkesan merupakan parameter prestasi penting akumulator dan juga asas bagi pengiraan rekabentuk akumulator. Apabila pemecah batu hidraulik beroperasi dalam keadaan mantap, isipadu minyak maksimum yang disimpan dan dilepaskan oleh akumulator dalam satu kitaran dipanggil isipadu pelepasan berkesan, dilambangkan sebagai Δ V .
Isipadu pelepasan berkesan Δ V berkaitan dengan ciri-ciri kinematik. Apabila aliran pam adalah tetap dan struktur serta kinematik pemecah batu hidraulik adalah tetap, tenaga hentaman W H , frekuensi f H , dan isi padu pelepasan berkesan Δ V semuanya mesti tetap. Oleh itu, apabila mereka bentuk akumulator, isi padu pelepasan berkesan sudah diketahui. Cara mengira Δ V akan diperkenalkan dalam bab-bab seterusnya.
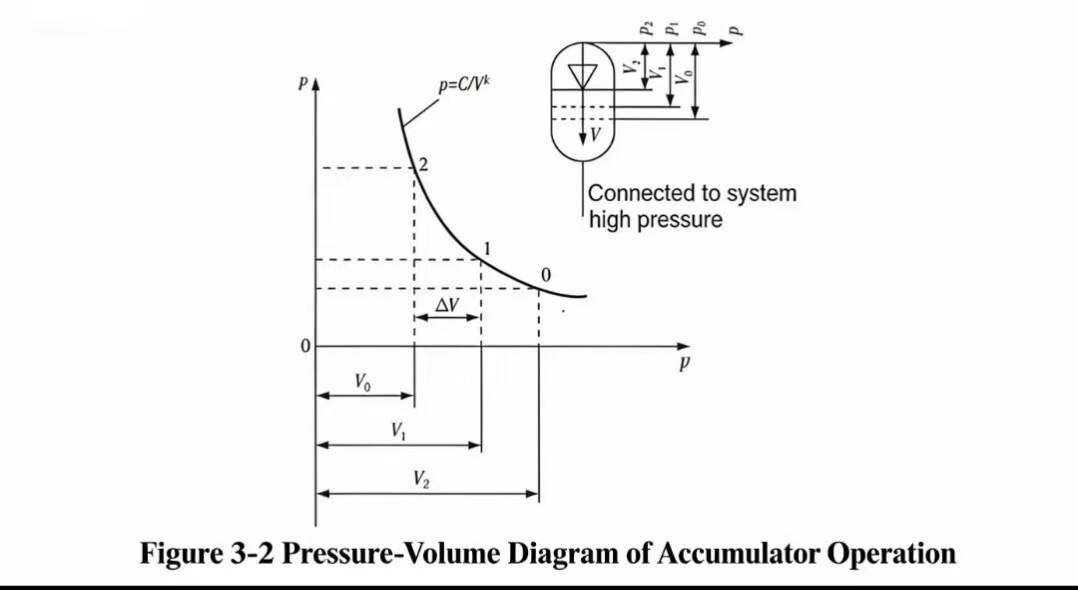
Asas untuk mengira isi padu berkesan akumulator V a ialah isi padu pelepasan berkesan sebenar Δ V . Apabila Δ V beroperasi di dalam akumulator, ia secara semestinya menyebabkan tekanan minyak sistem berubah, dan daya setara F g mesti dikekalkan. Oleh itu, kaedah pengiraan rekabentuk akumulator yang memenuhi keperluan di atas perlu dikaji. Rajah tekanan (daya)–isipadu akumulator semasa operasi ditunjukkan dalam Rajah 3-2.
Walaupun frekuensi kerja pemecah batu hidraulik tidak terlalu tinggi, proses pemampatan dan pengembangan nitrogen di dalamnya juga berlaku dengan cukup pantas, dengan masa yang tidak mencukupi untuk pertukaran haba dengan persekitaran; oleh itu, proses ini boleh dianggap sebagai proses adiabatik. Daripada persamaan keadaan gas:
p 1V k 1 = p 2V k 2 = p a V k a (3.12)
di mana: p a — tekanan pengisian, iaitu tekanan gas yang terkurung;
V a — isipadu pengisian, iaitu isipadu akumulator apabila omboh berada pada titik hentaman (secara umumnya isipadu kerja maksimum); V amax );
p 2— tekanan kerja maksimum;
V 2— isipadu yang sepadan dengan p 2(secara umumnya isipadu kerja minimum); V 2min );
p 1— tekanan kerja minimum;
V 1— isipadu yang sepadan dengan p 1, V 1 < V a .
Dalam Pers. (3.12), k = 1.4 ialah eksponen adiabatik. Jelas sekali:
δ V = V 1 − V 2 (3.13)
Daripada Pers. (3.12):
V 1 = V a (p a / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
Menggantikan ke dalam Pers. (3.13) memberikan:
δ V = V a (p a / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
Dalam Pers. (3.16), misalkan p a / p 1 = a = 0.8 hingga 1; dan nisbah tekanan gas bekerja γ = p 2 / p 1, secara umumnya γ = 1.2 hingga 1.45, dipilih berdasarkan ciri-ciri kerja pemecah batu hidraulik. Apabila a = 1, tekanan kerja minimum omboh bersamaan dengan tekanan pengisian ( p a = p 1); dalam keadaan ini V 1 = V a . Untuk mengelakkan membran akumulator daripada bersentuhan dengan tapak pada tekanan kerja minimum pemecah batu hidraulik — yang akan memendekkan jangka hayat perkhidmatan — a perlu ditetapkan kepada kurang daripada 1.
Terdapat dua pertimbangan untuk memilih γ : apabila γ besar, kerana akumulator beroperasi dalam keadaan adiabatik, suhu meningkat secara tajam, yang boleh menyebabkan kemerosotan awal membran akumulator atau bahkan terbakar; tetapi peningkatan γ boleh secara berkesan mengurangkan isipadu berkesan V a akumulator, yang amat bermanfaat untuk mengurangkan saiz struktur akumulator. Pereka mesti menimbang kelebihan dan kekurangan serta membuat keputusan berdasarkan syarat aplikasi; oleh itu:
δ V = V a a 1/K (1 − 1 / γ 1/K ) (3.17)
Daripada Pers. (3.17), isipadu berkesan akumulator boleh ditentukan:
V a = Δ Vγ 1/K \/ [ a 1/K (γ 1/K − 1)] (3.18)
Pers. (3.18) menunjukkan bahawa, daripada isipadu pelepasan berkesan Δ V , isipadu cas yang sepadan boleh ditentukan untuk memastikan kinematik yang direka dan Δ V dicapai. Dalam amalan, isipadu pelepasan berkesan Δ V ialah minyak yang dibekalkan akumulator kepada omboh semasa lelaran kuasa, bagi mengimbangi kekurangan bekalan pam.
Bagi pengiraan rekabentuk isipadu pelepasan berkesan Δ V , sila rujuk Seksyen 7.5. Untuk memenuhi keperluan rekabentuk optimum, bagi objektif rekabentuk yang berbeza, pengiraan isipadu aliran berkesan Δ V berubah mengikut yang dipilih α u (rujuk Seksyen 7.2.5 dan 7.27a).
Pada ketika ini, walaupun V a telah diperoleh dan boleh digunakan untuk merekabentuk parameter struktur akumulator, tugas pengiraan rekabentuk akumulator belum lagi selesai. Isu yang paling kritikal ialah bagaimana mengawal tekanan minyak untuk memastikan daya setara tercapai; dan hanya dengan mencapai daya setara sahaja kinematik yang direkabentuk dapat dijamin, yang seterusnya menjamin Δ V . Dengan kata lain, terdapat hubungan sepadan antara Δ V dan F g .
Perlu ditegaskan bahawa apabila V a ialah nilai tetap, p 1, p 2, dan p a boleh mempunyai pelbagai kombinasi, mewujudkan pelbagai daya setara, pelbagai dinamik, dan pelbagai kinematik — iaitu pelbagai Δ V nilai-nilai. Tugas berikut adalah, diberikan satu tetapan V a , untuk mencari kombinasi p 1, p 2, dan p a yang boleh mencapai daya setara yang diperlukan F g dan Δ V . Kerana apabila p a berubah, W H , f H , Δ V , p 1, dan p 2semuanya turut berubah secara sepadan. Dengan kata lain, mesti wujud tekanan cas p a yang boleh menjamin pencapaian tekanan setara p g . Tentunya, asas untuk mencari p a is p 1dan p 2, iaitu tekanan setara p g . Setelah hubungan antara parameter-parameter ini difahami, kaedah untuk mencari p 1, p 2, dan p a daripada tekanan setara p g boleh dikaji.
Rajah 3-2 menggambarkan p –V rajah takungan tekanan tinggi semasa operasi. Berdasarkan rajah ini, serta dengan menggabungkan prinsip daya setara — kerja yang dilakukan oleh daya berubah-ubah adalah sama dengan kerja yang dilakukan oleh daya setara — kita memperoleh:
p g δ V = ∫ V₂ V₁ p d V (3.19)
Dalam Pers. (3.19):
p = C / V k
Menggantikan ke dalam Pers. (3.19) dan mengkamirkannya:
p g δ V = C ∫V₂ V₁ d V / V k = 1 ÷ (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
Oleh itu:
p g δ V = 1 ÷ (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
Menghapuskan V 1dan V 2melalui penggantian dan menggantikan Pers. (3.17) memberi:
p g = p 1\/ ( k − 1) · ( γ − γ 1/K ) ÷ ( γ 1/K − 1) (3.22)
Selepas menyusun semula:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
Dalam Pers. (3.23), p g ialah tekanan setara yang dikenakan ke atas permukaan muka piston yang menahan tekanan. Dengan mengambil kira kehilangan tekanan sistem, ia harus diungkapkan sebagai tekanan kadar sistem p g = p H / K . Siri p 1dan p 2yang diperoleh dengan cara ini akan lebih dekat dengan nilai sebenar. Oleh itu:
p 1= ( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p a = aP 1 (3.26)
Dalam Pers. (3.24), pekali rintangan yang mengambil kira kehilangan tekanan sistem ialah K = 1.1 hingga 1.2.
Apabila akumulator tekanan tinggi bagi pemecah batu hidraulik beroperasi pada parameter-parameter ini, ia menjamin bahawa kesan pergerakan daya setara tercapai, kinematik yang direka dilaksanakan, dan tenaga hentaman serta frekuensi hentaman yang diperlukan dihantar. Dengan cara ini, masalah pengiraan kompleks dipermudah dan masalah tak linear dilinearkan.
Berdasarkan perkara di atas, peranti hentaman hidraulik (gerudi batu hidraulik dan pemecah batu hidraulik) — iaitu suatu sistem tak linear — ditukar kepada suatu sistem linear. Dari sudut pandangan teori, omboh boleh bergerak sepanjang langkah S mengikut corak mana-mana pun, selagi ia boleh dikawal dan mencapai halaju maksimum yang diperlukan pada titik hentaman v m — semua ini adalah boleh dilaksanakan. Bagi setiap corak pergerakan omboh, mesti wujud corak variasi daya yang sepadan; keduanya berkaitan sebagai sebab dan akibat. Dengan kata lain, apa jua corak pergerakan yang dimiliki omboh, corak variasi daya yang sepadan mesti dikenakan ke atasnya — daya merupakan sebab, manakala pergerakan pula merupakan akibat.
Tentu saja, selepas mereka bentuk corak pergerakan yang optimum, corak variasi daya yang sepadan juga boleh ditentukan, seterusnya menimbulkan dua topik teori untuk penyelidikan pemecah batu hidraulik: kinematik dan dinamik pemecah batu hidraulik.

Selamat datang di Hovoo, sebuah kilang meterai China. pengeluaran PU, getah dan meterai PTFE. meterai termasuk O-ring, meterai piston, meterai batang, ring kelabu dan meterai gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}