33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]

Idea penyelidikan di sebalik teori rekabentuk pemboleh ubah abstrak: tidak kira bagaimana parameter operasi penghancur batu hidraulik berubah semasa operasi, dua parameter yang memenuhi keperluan rekabentuk — tenaga hentaman W H dan frekuensi hentaman f H — tidak boleh berubah; manakala parameter lain tidak terlalu penting kepada pereka, dan terutamanya tidak penting kepada pengguna. Namun, pereka perlu memberi perhatian khusus kepada langkah omboh S , kerana setiap tingkah laku omboh berlaku dalam langkah yang tetap S , dan langkah omboh S dibataskan oleh struktur — ia tidak boleh dipilih secara sewenang-wenang. Langkah yang terlalu besar tidak dibenarkan oleh struktur mekanikal; manakala langkah yang terlalu kecil tidak dapat memenuhi keperluan tenaga hentaman dan frekuensi hentaman. Dengan kata lain, ini merupakan satu sekatan terhadap operasi penghancur batu hidraulik, dan mesti wujud nilai optimum.
Cara menangani masalah pengiraan rekabentuk bagi pemecah batu hidraulik — yang pada hakikatnya merupakan suatu sistem tak linear — dengan menggunakan kaedah linear merupakan kandungan utama bab ini.
— Asas Teori untuk Menukar Sistem Tak Linear kepada Sistem Linear
Apabila pemecah batu hidraulik beroperasi, parameter kerjanya — seperti tekanan sistem p , halaju omboh v , pecutan a , dan beban omboh — semuanya berubah secara tak linear dan merupakan fungsi masa. Pengiraan sistem sedemikian adalah sangat sukar dan kompleks. Namun, objektif rekabentuk dalam buku ini relatif mudah: mencari parameter struktur dan parameter kerja pemecah batu hidraulik yang mampu menghasilkan tenaga hentaman yang diperlukan W H dan frekuensi f H . Rumus tenaga hentaman ialah:
W H = ( m / 2) v 2m (3.1)
di mana: m — jisim omboh, malar;
v m — halaju seketika apabila omboh menghentam ekor pahat, iaitu halaju hentaman maksimum; ini merupakan halaju yang mesti dijamin dalam rekabentuk.
Terdapat dua syarat untuk memastikan tenaga hentaman yang diperlukan tercapai: omboh mesti mempunyai jisim tertentu dan halaju tertentu. Bagi pemecah batu hidraulik, jisim omboh m tidak boleh berubah semasa pergerakan. Oleh itu, memastikan tenaga hentaman tercapai bermaksud memastikan halaju hentaman maksimum v m tercapai.
Perlu ditekankan bahawa pergerakan omboh berlaku dalam suatu lejang tertentu. Dengan kata lain, tujuan pengiraan rekabentuk bagi pemecah batu hidraulik adalah untuk memastikan bahawa, dalam lejang tertentu, omboh dengan jisim tetap dipecutkan secara tepat kepada halaju hentaman maksimum yang ditetapkan v m dalam masa kitaran yang ditetapkan T , menghentam hujung pahat dan menghasilkan tenaga hentaman yang ditetapkan W H . Perubahan seketika terhadap a , v , dan p semasa pergerakan tidak penting bagi objektif pengiraan rekabentuk dan boleh diabaikan. Memastikan masa kitaran T juga memastikan frekuensi hentaman yang ditetapkan f H .
Masa kitaran T dan frekuensi hentaman f H memuaskan f H = 60 / T , di mana T ialah masa kitaran kerja omboh (untuk kesederhanaan pengiraan, jeda ringkas pada titik hentaman diabaikan).
Jika suatu kaedah pengiraan reka bentuk ringkas boleh ditemui untuk mencapai objektif di atas, kaedah ini akan berguna dalam rekabentuk kejuruteraan. Seperti yang diketahui umum, tekanan minyak hidraulik memacu omboh untuk melakukan kerja; berdasarkan hukum keabadian tenaga dan dengan mengabaikan kehilangan tenaga lain, semua kerja ini ditukar kepada tenaga kinetik omboh dan dipancarkan ke luar, menghasilkan hubungan berikut:
(m / 2) v 2m = ∫ 0S F (S ) D S (3.2)
Maksud fizikal Persamaan (3.2): sebelah kanan ialah kerja yang dilakukan oleh daya berubah-ubah F (S ) sepanjang langkah S ; sebelah kiri ialah tenaga kinetik yang diperoleh omboh semasa bergerak sepanjang langkah S .
Untuk mencapai pengiraan berbentuk linear, seseorang boleh membayangkan suatu daya malar F g yang melakukan kerja yang sama seperti daya berubah-ubah F (S ) sepanjang langkah yang sama S . Jadi daya malar tersebut F g boleh menggantikan daya berubah-ubah F (S ) dalam pengiraan lelurus dengan kesan yang sama, memberikan:
(m / 2) v 2m = ∫ 0S F (S ) D S = F g × S (3.3)
Menggantikan Pers. (3.1) ke dalam Pers. (3.3) memberikan:
F g = W H / S (3.4)
Dalam Pers. (3.4), daya malar F g dipanggil daya setara; ia melakukan kerja yang tepat sama seperti daya berubah-ubah F (S ).
Pers. (3.4) ialah formula untuk mengira daya setara. Tenaga impak W H = ( m /2)v 2m ditentukan oleh tugas rekabentuk dan merupakan parameter yang diketahui. Stroke S boleh diperoleh daripada pengiraan kinematik dan juga diketahui; oleh itu, daya setara yang diperlukan untuk mencapai tenaga impak yang diperlukan boleh dikira. Pemilihan yang betul terhadap stroke rekabentuk S dan frekuensi f H , serta pengoptimuman stroke S , akan diperkenalkan secara beransur-ansur dalam bab-bab seterusnya.
Daya setara ini sangat berguna dalam pengiraan rekabentuk pemecah batu hidraulik. Berdasarkan daya setara ini, kawasan penanggung tekanan omboh — iaitu dimensi struktur omboh — boleh ditentukan, keadaan kerja dan isipadu berkesan akumulator boleh ditentukan, serta pengiraan kinematik dan dinamik bagi pemecah batu hidraulik boleh dijalankan.
Kawasan penanggung tekanan omboh ialah:
A = F g / p g (3.5)
Dalam Pers. (3.5), p g ialah tekanan minyak setara sistem, yang sepadan dengan konsep daya setara, dan merupakan pemboleh ubah maya. Namun, memandangkan pergerakan minyak melibatkan rintangan, tekanan minyak operasi sebenar sistem mesti lebih tinggi daripada tekanan minyak setara; oleh itu, tekanan kadar digunakan dalam rekabentuk ialah:
p H = KP g (3.6)
Dalam Pers. (3.6), K = 1.12 hingga 1.15 ialah pekali rintangan untuk operasi sistem hidraulik. Nilai p H dipilih dalam amalan berdasarkan keperluan keseluruhan sistem yang sedang direka, jadi kawasan penahan tekanan omboh menjadi boleh dikira dan diketahui. Oleh itu:
A = KF g / p H (3.7)
Menggantikan Pers. (3.4) memberikan:
A = Kw H \/ ( p H S ) (3.8)
Perlu ditekankan bahawa hasil kinematik dan dinamik yang dikira daripada persamaan di atas tidak sepenuhnya realistik — hasil ini digambarkan sebagai berubah secara linear, iaitu pergerakan omboh dianggap sebagai pecutan seragam dan nyahpecutan seragam. Namun, masa kitaran omboh T , halaju maksimum v m , dan langkah pergerakan S adalah benar-benar wujud; untuk memenuhi keperluan reka bentuk, nilai-nilai ini adalah ringkas, praktikal, dan tepat.
Sebenarnya, soalan paling kritikal ialah sama ada tenaga hentaman W H , frekuensi hentaman f H , dan aliran Q memandu pemecah batu hidraulik adalah benar. Kerana luas permukaan piston yang menanggung tekanan A adalah tetap dan langkahnya S adalah tetap, maka aliran pam Q juga mesti benar.
Dengan cara ini, dengan menerapkan prinsip daya setara, pengiraan rekabentuk pemecah batu hidraulik tak linear dapat dipermudah kepada pengiraan linear; kedua-dua pengiraan kinematik dan dinamik boleh dipermudah secara besar-besaran dan dianggap sebagai gerakan pecutan seragam dan nyahpecutan seragam.
Wawasan akademik mengenai daya setara adalah untuk mengabaikan proses kompleks, memahami inti permasalahan, serta melinearkan masalah tak linear. Namun, hasil yang diperlukan adalah sangat benar dan boleh dipercayai, serta membantu memperdalam pemahaman dan eksplorasi corak operasi pemecah batu hidraulik.
Berdasarkan prinsip daya setara, halaju dan daya piston adalah seperti yang ditunjukkan dalam Rajah 3-1, yang terdiri daripada tiga peringkat: pecutan lejang pulang, nyahpecutan lejang pulang (pemberatan), dan lejang kuasa.
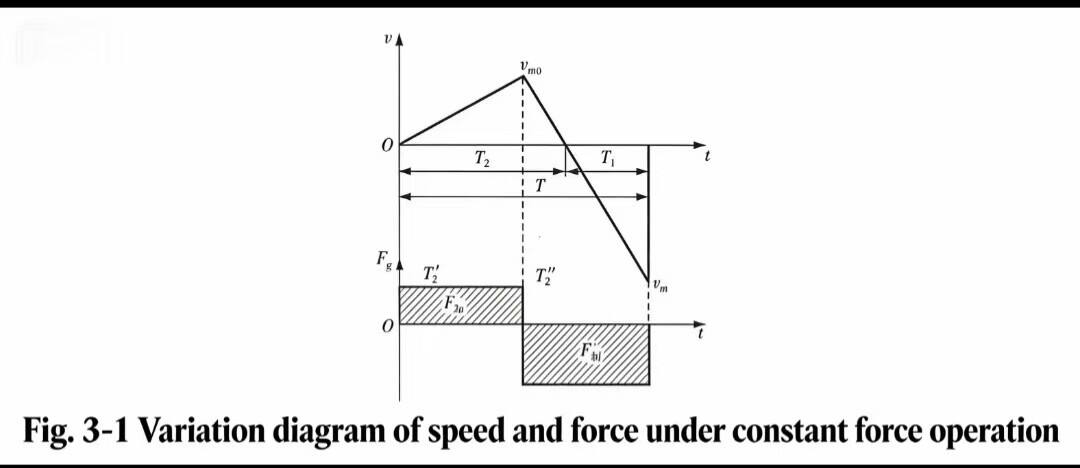
(1) Persamaan dinamik untuk peringkat pecutan lejang pulang piston
Andaikan daya pemandu lejang pulang F 2g , halaju v , dan pecutan a ditakrifkan sebagai [+]. Daya pemandu setara yang memecutkan piston semasa lejang pulang ialah:
F 2g = p g A ′2 = mA 2 (3.9)
di mana: a 2= [+] — pecutan lejang pulang piston;
A ′2— luas kawasan penahan tekanan berkesan ruang hadapan piston;
p g — tekanan setara sistem.
(2) Persamaan dinamik untuk peringkat nyahpecutan lejang pulang piston
Daya pendorong setara yang menyebabkan nyahpecutan omboh pada langkah balik ialah:
F 3g = p g A ′1 = mA 3 (3.10)
di mana: a 3= [−] — nyahpecutan (pembezaan) omboh pada langkah balik.
(3) Persamaan dinamik untuk peringkat langkah kuasa omboh
Daya pendorong setara yang menyebabkan pecutan omboh pada langkah kuasa ialah:
F 1G = p g A ′1 = mA 1 (3.11)
di mana: a 1= [−] — pecutan omboh pada langkah kuasa;
A ′1— luas kawasan penanggung tekanan berkesan bagi ruang belakang omboh.
Konsep luas kawasan penanggung tekanan berkesan berbeza-beza bergantung kepada tiga prinsip kerja berbeza bagi pemecah batu hidraulik yang diterangkan di atas; konsep ini dibincangkan secara terperinci dalam bab dinamik.

Selamat datang di Hovoo, sebuah kilang meterai China. pengeluaran PU, getah dan meterai PTFE. meterai termasuk O-ring, meterai piston, meterai batang, ring kelabu dan meterai gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}