33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Jalan E Mufu, Daerah Gulou, Nanjing, China [email protected] | [email protected]

Reka bentuk penghancur batu hidraulik bermaksud mengira parameter struktur yang akan memenuhi keperluan prestasi yang ditetapkan dalam spesifikasi reka bentuk. Di bawah parameter struktur ini, penghancur batu hidraulik boleh mencapai tenaga hentaman dan frekuensi hentaman yang diperlukan.
Perlu ditekankan dengan tegas bahawa penghancur batu hidraulik menghasilkan tenaga hentaman dan frekuensi hentaman melalui pergerakan piston ke hadapan dan ke belakang dalam satu lejang tetap S di dalam badan silinder. Dengan lejang tetap ini, omboh bergerak dalam satu kitaran berterusan: pecutan lejang pulang → nyahpecutan lejang pulang (rem) → kelajuan lejang pulang jatuh ke sifar → pecutan lejang kuasa → mencapai titik hentaman pada kelajuan maksimum v m → mencapai ekor pahat (mengeluarkan tenaga hentaman) → berhenti, memulakan kitaran seterusnya. Lejang tetap ini S dipanggil lejang omboh; ia merupakan asas penting untuk menentukan dimensi badan silinder.
Omboh bergerak pergi dan datang di dalam badan silinder. Bermula dari titik hentaman, ia memecut semasa lejang pulang untuk mencapai kelajuan maksimum lejang pulang v mo , kemudian mula nyahpecut akibat pertukaran injap; kelajuan turun dengan cepat daripada v mo ke sifar — omboh berhenti pada titik mati atas. Gerak balas yang dilalui omboh dipanggil gerak balas kembali. Pada ketika ini, memandangkan injap masih berada dalam keadaan asalnya, omboh mula memecut pada gerak balas kuasa sehingga mengenai titik hentaman. Apabila omboh menyentuh ekor pahat, halaju omboh telah mencapai maksimum — yang dipanggil halaju hentaman maksimum omboh v m . Gerak balas yang dilalui omboh dari titik mati atas hingga mengenai ekor pahat dipanggil gerak balas kuasa. Jelas sekali, gerak balas kembali dan gerak balas kuasa mesti sama.
Untuk mengkaji teori rekabentuk pemecah batu hidraulik secara lebih mendalam, adalah berguna terlebih dahulu untuk memahami halaju omboh, tekanan pelbagai ruang, serta agihan dan variasi aliran semasa operasi. Sebab-sebab dan arah perubahan parameter kerja pemecah batu hidraulik semasa operasi ditunjukkan dalam Rajah 2-4. 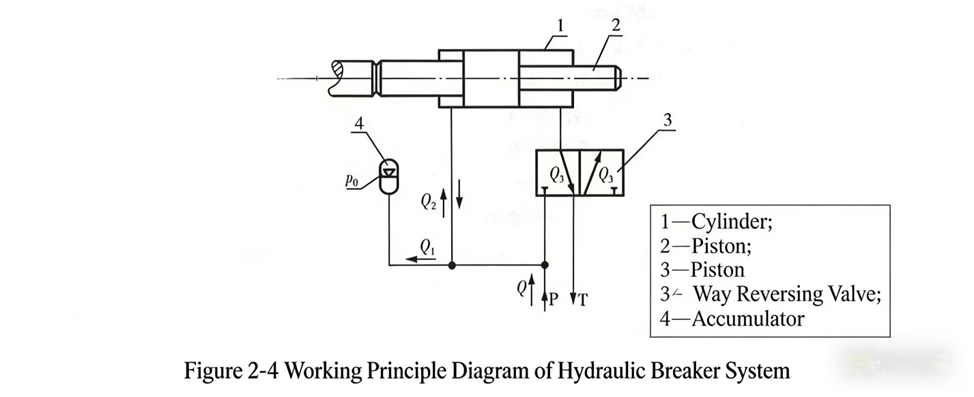
p 0ialah tekanan pra-isian nitrogen bagi akumulator; Q ialah aliran yang dibekalkan kepada pemecah batu hidraulik oleh pam; Q 1ialah aliran masuk akumulator (+) dan aliran keluar (−); Q 2ialah aliran masuk (+) dan aliran keluar (−) ruang hadapan piston, dengan Q = Q 1 + Q 2. Q 3ialah aliran masuk (+) dan aliran keluar (−) ruang belakang piston; p ialah tekanan sistem.
Rajah 2-4 menunjukkan piston pada permulaan langkah balik. Aliran pam Q memasuki sistem; sebahagian daripadanya ( Q 2) memasuki ruang hadapan piston dan menggerakkan langkah baliknya, manakala ruang belakang melepaskan minyak ke tangki ( Q 3); bahagian yang lain ( Q 1) memasuki akumulator dan memampatkan nitrogen, sehingga tekanan sistem p bermula daripada tekanan pra-isian akumulator p 0dan meningkat secara berterusan apabila Q 1mengalir masuk. Pergerakan pemecah batu hidraulik, berdasarkan keadaan kerja omboh, secara umumnya boleh dibahagikan kepada tiga peringkat, seperti yang diterangkan berikut:
(1) Pecutan omboh semasa langkah kembali
Omboh bermula langkah kembali dari titik hentaman. Apabila pam terus memasukkan aliran, tekanan sistem p ↑ → halaju omboh v ↑ → Q 2↑ → Q 1↓ → Q 3↑, dan minyak terus dialirkan ke tangki. Oleh sebab halaju omboh v ↑ → Q 2↑ → Q 1↓, sehingga Q 1= 0. Ciri utama tempoh ini ialah v ↑ dan p ↑. Apabila Q 1= 0, satu titik lengkung muncul: tekanan p tidak lagi meningkat, tetapi kelajuan omboh terus meningkat (kerana daya pendorong bagi langkah balik omboh masih wujud). Selepas titik lengkung ini, disebabkan v ↑, aliran pam Q tidak lagi dapat memenuhi permintaan aliran bagi pergerakan omboh, iaitu Q 2 > Q . Untuk memenuhi permintaan aliran bagi ruang hadapan omboh, akumulator kini mesti melepaskan minyak untuk melengkapi kekurangan pam. Berdasarkan prinsip keseimbangan aliran, Q 2 = Q + Q 1; pada ketika ini Q 1ialah aliran yang mengalir keluar dari akumulator dan masuk ke ruang hadapan omboh, sehingga v ↑ ke v = v mo , injap beralih, dan omboh memasuki fasa nyahpecutan balikan.
(2) Nyahpecutan Balikan Omboh
Semasa balikan, disebabkan bahu hadapan omboh telah melalui lubang suap balik, injap beralih dan menyongsangkan arah daya yang bertindak ke atas omboh; daya pendorong dikenakan ke atas omboh dalam arah songsang, dan omboh mula nyahpecut sehingga v = 0. Balikan kini selesai; omboh telah mencapai titik mati atas dan melalui keseluruhan langkah S , sedia untuk memulakan langkah kuasa.
(3) Langkah Kuasa Omboh
Apabila halaju omboh menurun kepada v = 0, daya yang bertindak ke atas omboh menyongsang, maka halaju omboh v juga menyongsang, berubah dari '+' kepada '−'. Omboh kemudian mula memecut semasa langkah kuasa di bawah daya songsang tersebut. Pada permulaan pecutan langkah kuasa, halaju omboh bermula dari v = 0, pada ketika itu penggunaan minyak omboh Q 3= 0; keseluruhan aliran keluar pam Q mengalir ke dalam akumulator, Q 1 = Q , Q 2= 0. Apabila halaju langkah kuasa v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. Perlu diperhatikan di sini bahawa kerana luas ruang hadapan A 2lebih kecil daripada luas ruang belakang A 1, berdasarkan prinsip keseimbangan aliran, mesti terdapat Q 3 = Q 2 + Q − Q 1, dengan v ↑ dan Q 1↓, sehingga Q 1= 0. Ini bermaksud v ↑; pada ketika ini keseluruhan aliran keluar pam Q sepenuhnya diinjeksikan ke dalam ruang belakang omboh, iaitu. Q 3 = Q , Q 1= 0, tetapi halaju omboh v belum lagi mencapai halaju maksimum v m . Piston terus memecut; aliran pam Q tidak lagi mampu memenuhi permintaan, jadi akumulator mula melengkapi aliran, iaitu Q 3 = Q + Q 1(−), sehingga piston menghentam bahagian belakang pahat pada halaju maksimum v m . Pada ketika hentaman berlaku, halaju piston secara tiba-tiba menjadi v = 0, dan piston mengeluarkan tenaga hentaman W ke luar, menyelesaikan satu kitaran kerja.
Apabila aliran masuk/keluar akumulator Q 1berubah, tekanan sistem p juga berubah secara sepadan. Semasa pengisian akumulator, Q 1= '+', tekanan sistem p ↑; apabila akumulator melepaskan minyak ke luar, Q 1= '−', tekanan sistem p ↓. Dengan kata lain, proses kerja pemecah batu hidraulik sentiasa disertai perubahan dalam tekanan sistem. Apabila jumlah minyak terbanyak telah diisi ke dalam akumulator, tekanan sistem berada pada tahap tertinggi. Apabila omboh mencapai titik hentaman, akumulator telah melepaskan jumlah minyak terbanyak — inilah ketika tekanan sistem berada pada tahap terendah. Oleh itu, dari masa pemecah batu hidraulik bermula sehingga mencapai operasi mantap, tekanan kerja sistemnya p sentiasa berkitar antara tekanan maksimum p max dan tekanan minimum p min , dan adalah mustahil sama sekali bagi tekanan tersebut untuk kekal tetap dan tidak berubah. Rajah 2-5 menunjukkan variasi semua parameter sistem semasa pemecah batu hidraulik beroperasi. 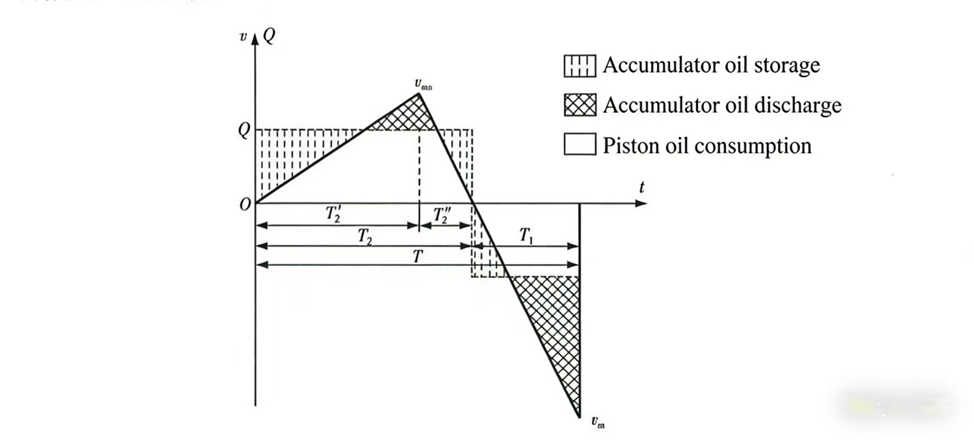
Rajah 2-5 Variasi parameter sistem semasa operasi pemecah batu hidraulik [Legenda: berlorek = pengecasan akumulator; berlorek silang = pelepasan akumulator; putih = penggunaan minyak oleh omboh]
Proses kerja yang diterangkan di atas menunjukkan bahawa variasi parameter kerja adalah agak kompleks — iaitu suatu sistem tak linear. Ini menimbulkan kesukaran besar terhadap analisis teori dan penyelidikan mendalam. Sebenarnya, ini merupakan salah satu sebab utama mengapa penyelidikan teori mengenai pemecah batu hidraulik tertinggal di belakang pembangunan produk.
Penyelidik di seluruh dunia secara umumnya mengambil dua pendekatan teknikal berbeza dalam penyelidikan teori mengenai peranti hentaman hidraulik (pemecah batu hidraulik): penyelidikan berasaskan teori sistem linear dan penyelidikan berasaskan teori sistem tak linear.
1) Penyelidikan berdasarkan teori sistem linear mengandaikan daya yang bertindak ke atas omboh adalah malar, halaju omboh meningkat secara linear pada kadar seragam, dan beberapa faktor pengaruh diabaikan; suatu model matematik linear dibina berdasarkan asas ini untuk penyelidikan teoretikal. Kaedah penyelidikan ini jelas mudah dan boleh menyelesaikan beberapa masalah praktikal, tetapi ketepatannya rendah dan mempunyai ralat yang agak besar.
2) Penyelidikan berdasarkan teori sistem tak linear menggunakan persamaan pembezaan tak linear peringkat tinggi untuk menggambarkan corak gerakan pemecah batu hidraulik, serta menggambarkan kinematik dan dinamik omboh pemecah batu hidraulik dengan lebih tepat. Penyelidikan tak linear ini lebih tepat berbanding penyelidikan linear, namun masih bergantung kepada beberapa andaian. Walaupun ia dapat mendedahkan fenomena fizikal tertentu pemecah impak hidraulik dengan lebih tepat, penyelesaiannya sukar, tidak mudah ditafsirkan, dan hanya boleh menghasilkan penyelesaian berangka melalui pengiraan komputer, menjadikannya kurang selesa digunakan.
Selain dua pendekatan ini, penulis, setelah bertahun-tahun menjalankan penyelidikan yang tumpu, mencadangkan Teori Reka Bentuk Pemboleh Ubah Abstrak untuk Penghancur Batu Hidraulik (mekanisme impak hidraulik). Dengan menggunakan teori reka bentuk pemboleh ubah abstrak, penyelesaian analitik bagi penghancur batu hidraulik boleh diperoleh, yang dapat mendedahkan secara mendalam corak dalaman pergerakan penghancur batu hidraulik serta menyediakan asas teori bagi inovasi teknikal oleh pengguna.
Pendekatan penyelidikan teori reka bentuk pemboleh ubah abstrak penghancur batu hidraulik: mengakui ketaklinearan parameter kerja penghancur batu hidraulik, tetapi menggunakan transformasi daya setara untuk melinearkan sistem tak linear, sehingga ia boleh dikaji dengan menggunakan kaedah sistem linear bagi memperoleh penyelesaian analitik. Parameter kerja dan parameter struktur penghancur batu hidraulik yang diperoleh dengan kaedah ini adalah cukup tepat dan pengiraannya mudah. Teori reka bentuk pemboleh ubah abstrak penghancur batu hidraulik akan dibincangkan secara khusus dalam bab-bab seterusnya.

Selamat datang di Hovoo, sebuah kilang meterai China. pengeluaran PU, getah dan meterai PTFE. meterai termasuk O-ring, meterai piston, meterai batang, ring kelabu dan meterai gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}