33-99No. Mufu E Rd. Gulou District, Nanjing, China [email protected] | [email protected]
33-99No. Mufu E Rd. Gulou District, Nanjing, China [email protected] | [email protected]

In theorie heeft elke hydraulische rotsbreekmachine een accumulatorkamer met variabele druk nodig — vooral een grote hogedrukaccumulatorkamer.
De hogedrukaccumulatorkamer, geïnstalleerd aan de systeemingang van een hydraulische rotsbreekmachine, vervult drie functies:
(1) Om het overschot en tekort aan systeemvoorziening en olieverbruik in evenwicht te brengen. Wanneer de pompdebiet groter is dan het olieverbruik van het systeem, neemt de hogedrukaccu het overschot op en fungeert als een olieopslagapparaat. Wanneer de pompdebiet kleiner is dan het olieverbruik van het systeem, levert de accu olie om het tekort aan te vullen en fungeert als een olieafvoerapparaat. De hogedrukaccu speelt een rol bij het in evenwicht brengen van debietoverschotten en -tekorten in het systeem en is een belangrijk onderdeel voor een stabiele systeemwerking.
(2) Om drukschommelingen in het systeem op te nemen en kleine drukpieken te verminderen, waardoor pijpleidingen en hydraulische componenten worden beschermd en hun levensduur wordt verlengd.
(3) Bij het ontwerp van hydraulische slagmechanismen met behulp van abstracte variabeletheorie ondersteunt de accu de realisatie van de equivalente kracht. Zolang de accu correct is ontworpen, kan de exacte equivalente kracht worden verkregen, wat waarborgt dat het systeem de vereiste kinematische en dynamische eigenschappen bereikt.
Gezien de belangrijke rol van de hogedrukaccumulatorkamer in het hydraulische rotsbreeksystem — en met name de bijzondere functie ervan om te waarborgen dat het systeem de vereiste kinematica en dynamica bereikt — is het opstellen van een juiste ontwerptheorie en -methode voor de hogedrukaccumulatorkamer zeer belangrijk.
Het effectief afvoervolume is een belangrijke prestatieparameter van de accumulatorkamer en vormt ook de basis voor de ontwerpberekeningen van de accumulatorkamer. Wanneer een hydraulische rotsbreekmachine in stationaire toestand werkt, wordt het maximale olievolume dat de accumulatorkamer per cyclus opslaat en afvoert, het effectief afvoervolume genoemd, aangegeven met Δ V .
Het effectief afvoervolume Δ V is gerelateerd aan de kinematische kenmerken. Wanneer de pompdebiet constant is en de constructie en kinematica van de hydraulische rotsbreekmachine vastliggen, zijn de slagenergie W H , slagfrequentie f H en het effectief afvoervolume Δ V zijn alle noodzakelijkerwijs vast. Bij het ontwerpen van de accumulator is het effectieve ontladingsvolume daarom reeds bekend. Hoe Δ moet worden berekend V wordt in latere hoofdstukken behandeld.
De basis voor het berekenen van het effectieve volume van de accumulator V een is het daadwerkelijke effectieve ontladingsvolume Δ V . Wanneer Δ V binnen de accumulator werkt, veroorzaakt dit noodzakelijkerwijs een verandering in de oliedruk van het systeem en moet de equivalente kracht F g worden gehandhaafd. Daarom dient de berekeningsmethode voor het ontwerp van de accumulator die aan bovenstaande eisen voldoet, te worden onderzocht. Het druk(kracht)–volume-diagram van de accumulator tijdens bedrijf is weergegeven in figuur 3-2.
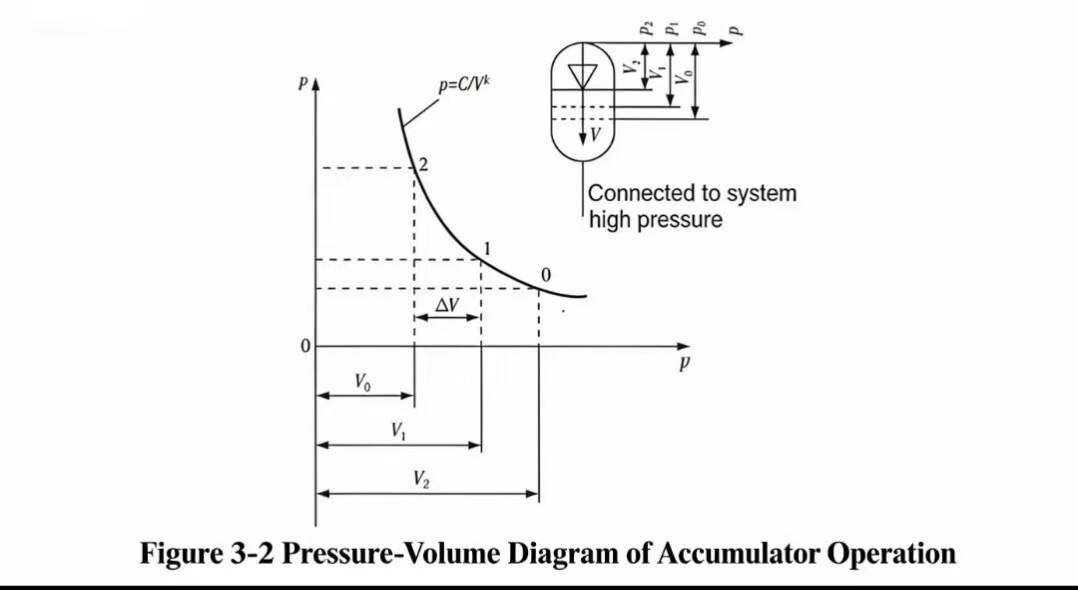
Hoewel de werkfrequentie van een hydraulische rotsbreekmachine niet erg hoog is, verloopt het stikstofcompressie- en -expansieproces erin eveneens vrij snel, zodat er onvoldoende tijd is om warmte uit te wisselen met de omgeving; het proces kan derhalve worden beschouwd als een adiabatisch proces. Uit de toestandsvergelijking van gassen:
p 1V k 1 = p 2V k 2 = p een V k een (3.12)
waarbij: p een — laaddruk, d.w.z. de druk van het afgesloten gas;
V een — laadvolume, d.w.z. het volume van de accumulator wanneer de zuiger zich op het botsingspunt bevindt (over het algemeen het maximale werkvolume); V amax );
p 2— maximale werkdruk;
V 2— volume dat overeenkomt met p 2(over het algemeen het minimale werkvolume); V 2 min );
p 1— minimale werkdruk;
V 1— volume dat overeenkomt met p 1, V 1 < V een .
In vergelijking (3.12), k = 1,4 is de adiabatische exponent. Duidelijk is dat:
δ V = V 1 − V 2 (3.13)
Uit vergelijking (3.12):
V 1 = V een (p een / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
Vervangen in vergelijking (3.13) geeft:
δ V = V een (p een / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
In vergelijking (3.16), stel p een / p 1 = een = 0,8 tot 1; en de gaswerkdrukverhouding γ = p 2 / p 1, typisch γ = 1,2 tot 1,45, gekozen op basis van de werkkenmerken van de hydraulische rotsbreekmachine. Wanneer een = 1, is de minimale werkdruk van de zuiger gelijk aan de laaddruk ( p een = p 1); in deze toestand V 1 = V een . Om te voorkomen dat het membraan van de accumulator de bodem raakt bij de minimale werkdruk van de hydraulische rotsbreekmachine — wat de levensduur zou verkorten — een moet worden ingesteld op minder dan 1.
Er zijn twee overwegingen bij het kiezen van γ : wanneer γ groot is, omdat de accumulator in een adiabatische toestand werkt, stijgt de temperatuur scherp, wat kan leiden tot vroegtijdige verslechtering van het accumulator-membraan of zelfs tot doorbranden ervan; maar het vergroten van γ kan het effectieve volume V een van de accumulator effectief verminderen, wat zeer voordelig is voor het verkleinen van de constructiegrootte van de accumulator. De ontwerper moet de voor- en nadelen afwegen en een beslissing nemen op basis van de toepassingsomstandigheden; daarom:
δ V = V een een 1/K (1 − 1 / γ 1/K ) (3.17)
Uit vergelijking (3.17) kan het effectieve volume van de accumulator worden bepaald:
V een = Δ Vγ 1/K \/ [ een 1/K (γ 1/K − 1)] (3.18)
Vgl. (3.18) laat zien dat, uitgaande van het effectieve afvoervolume Δ V , het bijbehorende laadvolume kan worden bepaald om te waarborgen dat de ontworpen kinematica en Δ V worden bereikt. In de praktijk is het effectieve afvoervolume Δ V de olie die de accumulator tijdens de arbeidsslag aan de zuiger levert om het tekort aan pompvoorziening aan te vullen.
Voor de ontwerpberekening van het effectieve afvoervolume Δ V , zie paragraaf 7.5. Om aan de eisen van een optimale ontwerp te voldoen, verandert de berekening van het effectieve afvoervolume Δ V afhankelijk van het gekozen doel α u (zie paragraaf 7.2.5 en 7.27a).
Op dit moment, hoewel V een is gevonden en kan worden gebruikt om de structurele parameters van de accumulator te ontwerpen, is de ontwerpberekening voor de accumulator nog niet voltooid. Het meest kritieke aspect is hoe de oliedruk moet worden geregeld om te waarborgen dat de equivalente kracht wordt bereikt; en alleen door het bereiken van de equivalente kracht kan de ontworpen kinematica worden gegarandeerd, wat op zijn beurt Δ V garandeert. Met andere woorden, er bestaat een onderlinge relatie tussen Δ V en F g .
Er dient te worden opgemerkt dat wanneer V een een vaste waarde is, p 1, p 2, en p een vele combinaties kan hebben, waardoor meerdere equivalente krachten, meerdere dynamische gedragingen en meerdere kinematische bewegingen — d.w.z. meerdere Δ V waarden — mogelijk zijn. De volgende taak is, gegeven een vaste V een , de combinatie van p 1, p 2, en p een die de vereiste equivalente kracht kan leveren F g en Δ V . Omdat wanneer p een verandert, W H , f H , Δ V , p 1, en p 2veranderen allemaal dienovereenkomstig. Met andere woorden, er moet een ladingsdruk zijn p een die het bereiken van de equivalente druk kan garanderen p g . Uiteraard is de basis voor het bepalen van p een is p 1en p 2, dwz. de equivalente druk p g . Zodra de relaties tussen deze parameters bekend zijn, is de methode voor het bepalen van p 1, p 2, en p een van de equivalente druk p g kan worden bestudeerd.
Figuur 3-2 beschrijft de p –V diagram van de hogedrukaccumulator tijdens bedrijf. Op basis van dit diagram, en in combinatie met het equivalentekrachtprincipe — de arbeid verricht door de variërende kracht is gelijk aan de arbeid verricht door de equivalente kracht — hebben we:
p g δ V = ∫ V₂ V₁ p d V (3.19)
In vergelijking (3.19):
p = C / V k
Vervangen in vergelijking (3.19) en integreren:
p g δ V = C ∫V₂ V₁ d V / V k = 1 / (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
Daarom:
p g δ V = 1 / (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
Verwijderen V 1en V 2door substitutie en door vergelijking (3.17) te vervangen, wordt verkregen:
p g = p 1\/ ( k − 1) · ( γ − γ 1/K ) / ( γ 1/K − 1) (3.22)
Na herschikking:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
In vergelijking (3.23) is p g de equivalente druk die op het drukdragende oppervlak van de zuiger wordt uitgeoefend. Rekening houdend met drukverliezen in het systeem, dient deze te worden uitgedrukt als de nominale systeemdruk p g = p H / K gelanceerd. De p 1en p 2op deze manier verkregen, zal dichter bij de werkelijke waarden liggen. Daarom:
p 1= ( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p een = - Ik ben... 1 (3.26)
In vergelijking (3.24) is de weerstandscoëfficiënt die rekening houdt met drukverliezen in het systeem K = 1,1 tot 1,2.
Wanneer de hogedrukaccumulator van een hydraulische rotsbreekhamer onder deze parameters werkt, is gewaarborgd dat het equivalente krachtbewegingseffect wordt bereikt, dat de ontworpen kinematica worden gerealiseerd en dat de vereiste slagenergie en slagfrequentie worden geleverd. Op deze manier wordt een complex berekeningsprobleem vereenvoudigd en wordt een niet-lineair probleem gelinialiseerd.
Op basis van het bovenstaande wordt het hydraulische slagapparaat (hydraulische rotsborenmachine en hydraulische rotsbreekhamer) — een niet-lineair systeem — omgezet in een lineair systeem. Vanuit theoretisch oogpunt kan de zuiger over de slag bewegen S volgens elk willekeurig patroon, mits het te regelen is en op het moment van impact de vereiste maximale snelheid bereikt v m — dit alles is haalbaar. Voor elk zuigerbewegingspatroon moet er een overeenkomstig krachtvariatiepatroon zijn; de twee staan in een oorzakelijk-veroorzaakt verband. Met andere woorden: welk bewegingspatroon de zuiger ook heeft, er moet een overeenkomstig krachtvariatiepatroon op worden toegepast — kracht is de oorzaak, beweging is het gevolg.
Natuurlijk kan, nadat het optimale bewegingspatroon is ontworpen, ook het bijbehorende krachtvariatiepatroon worden bepaald, waardoor twee theoretische onderzoeksonderwerpen voor hydraulische rotsslagmachines ontstaan: de kinematica en de dynamica van de hydraulische rotsslagmachine.

Welkom bij HOVOO, een Chinese zegelfabriek. Productie van PU, Rubber en PTFE zegels. De zegels omvatten O-ring, pistonzegel, stangzegel, Gray ring en gaszegel.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}