33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]
33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]

În teorie, fiecare ciocan hidraulic pentru stânci necesită un acumulator cu presiune variabilă — în special un acumulator de înaltă presiune de dimensiuni mari.
Acumulatorul de înaltă presiune, montat la intrarea sistemului unui ciocan hidraulic pentru stânci, îndeplinește trei funcții:
(1) Pentru a echilibra excedentul și deficitul dintre aprovizionarea sistemului și consumul de ulei. Atunci când debitul pompei este mai mare decât consumul de ulei al sistemului, acumulatorul de înaltă presiune absoarbe debitul excedentar și funcționează ca un dispozitiv de stocare a uleiului. Atunci când debitul pompei este mai mic decât consumul de ulei al sistemului, acesta descarcă ulei pentru a compensa deficitul, funcționând ca un dispozitiv de descărcare a uleiului. Acumulatorul de înaltă presiune îndeplinește rolul de echilibrare a excedentului și deficitului de debit din sistem și reprezintă un component esențial pentru funcționarea stabilă a sistemului.
(2) Pentru a absorbi fluctuațiile de presiune din sistem și pentru a reduce vârfurile mici de presiune, protejând astfel conductele și componentele hidraulice și prelungindu-le durata de viață.
(3) În proiectarea mecanismelor de impact hidraulic, utilizând teoria variabilelor abstracte, acesta contribuie la realizarea forței echivalente. Atâta timp cât acumulatorul este proiectat corect, se poate obține forța echivalentă exactă, asigurând astfel atingerea cerințelor privind cinematica și dinamica sistemului.
Având în vedere rolul important al acumulatorului de înaltă presiune în sistemul hidraulic de spargere a rocilor — și mai ales funcția sa specială de a asigura realizarea cinematicii și dinamicii necesare sistemului — stabilirea unei teorii și metode corecte de proiectare a acumulatorului de înaltă presiune este foarte importantă.
Volumul eficient de descărcare este un parametru important de performanță al acumulatorului și, de asemenea, baza calculelor de proiectare ale acestuia. Când un spărgător hidraulic de roci funcționează în regim staționar, volumul maxim de ulei pe care acumulatorul îl stochează și îl descarcă într-un ciclu se numește volum eficient de descărcare, notat Δ V .
Volumul eficient de descărcare Δ V este legat de caracteristicile cinematice. Atunci când debitul pompei este constant și structura, respectiv cinematica spărgătorului hidraulic de roci, sunt fixate, energia de lovire U H , frecvența f H și volumul eficient de descărcare Δ V sunt toate, în mod necesar, fixe. Astfel, la proiectarea acumulatorului, volumul efectiv de descărcare este deja cunoscut. Cum se calculează Δ V va fi prezentat în capitolele ulterioare.
Baza pentru calcularea volumului efectiv al acumulatorului V a este volumul real efectiv de descărcare Δ V . Când Δ V funcționează în interiorul acumulatorului, determină, în mod necesar, o modificare a presiunii uleiului din sistem, iar forța echivalentă F g trebuie menținută. Prin urmare, trebuie studiată metoda de calcul a acumulatorului care să satisfacă cerințele de mai sus. Diagrama presiune (forță)–volum a acumulatorului în timpul funcționării este prezentată în Fig. 3-2.
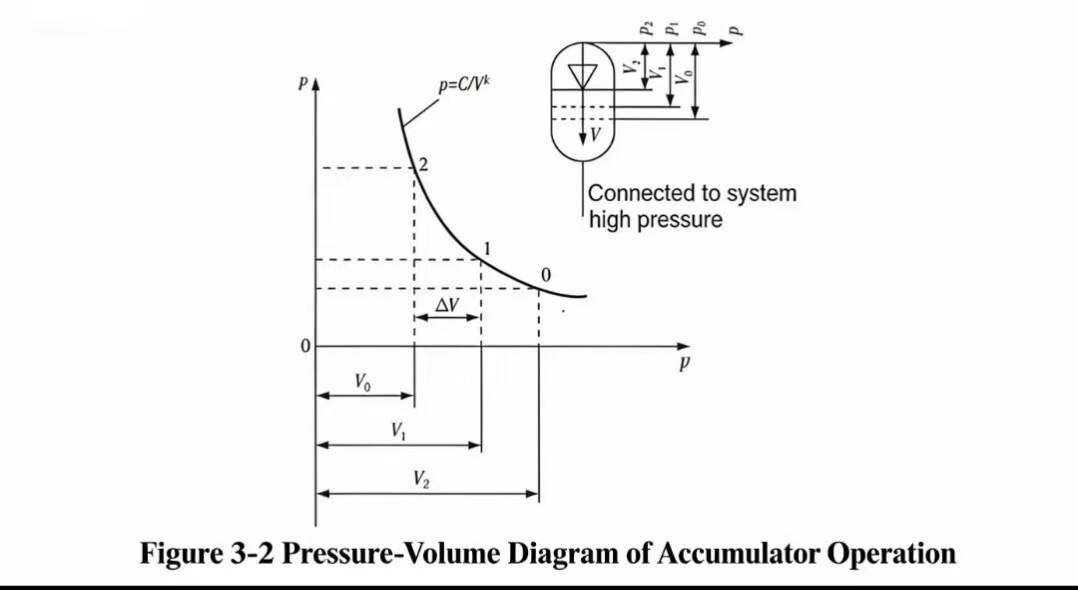
Deși frecvența de funcționare a unei spărgătoare hidraulice pentru stâncă nu este foarte ridicată, procesul de comprimare și expansiune a azotului din interiorul acesteia este, de asemenea, destul de rapid, având un timp insuficient pentru schimbul de căldură cu mediul înconjurător; acest proces poate fi, prin urmare, tratat ca un proces adiabatic. Din ecuația de stare a gazelor:
p 1V k 1 = p 2V k 2 = p a V k a (3.12)
unde: p a — presiune de încărcare, adică presiunea gazului închis;
V a — volum de încărcare, adică volumul acumulatorului când pistonul se află în punctul de impact (în general, volumul maxim de lucru); V amax );
p 2— presiune maximă de lucru;
V 2— volum corespunzător p 2(în general, volumul minim de lucru); V 2min );
p 1— presiune minimă de lucru;
V 1— volum corespunzător p 1, V 1 < V a .
În Ec. (3.12), k = 1,4 este exponentul adiabatic. Evident:
δ V = V 1 − V 2 (3.13)
Din ec. (3.12):
V 1 = V a (p a / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
Înlocuind în ec. (3.13) se obține:
δ V = V a (p a / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
În ec. (3.16), fie p a / p 1 = a = 0,8 până la 1; iar raportul de presiune de lucru al gazului γ = p 2 / p 1, de obicei γ = 1,2 până la 1,45, ales în funcție de caracteristicile de funcționare ale spărgătorului hidraulic de stâncă. Când a = 1, presiunea minimă de lucru a pistonului este egală cu presiunea de încărcare ( p a = p 1); în această stare V 1 = V a pentru a preveni contactul membranei acumulatorului cu baza la presiunea minimă de lucru a ciocanului hidraulic pentru spart stânci — ceea ce ar reduce durata de viață — a trebuie să fie setat la o valoare mai mică decât 1.
Există două considerente privind alegerea γ : atunci când γ este mare, deoarece acumulatorul funcționează în stare adiabatică, temperatura crește brusc, ceea ce poate duce la deteriorarea prematură a membranei acumulatorului sau chiar la arderea acesteia; totuși, mărirea γ poate reduce eficient volumul efectiv V a al acumulatorului, ceea ce este foarte avantajos pentru reducerea dimensiunilor structurale ale acumulatorului. Proiectantul trebuie să evalueze avantajele și dezavantajele și să ia o decizie pe baza condițiilor de utilizare; prin urmare:
δ V = V a a 1/K (1 − 1 / γ 1/K ) (3.17)
Din Ec. (3.17) se poate determina volumul efectiv al acumulatorului:
V a = Δ Vγ 1/K \/ [ a 1/K (γ 1/K − 1)] (3.18)
Ec. (3.18) arată că, din volumul efectiv de debitare Δ V , se poate determina volumul corespunzător de încărcare, pentru a asigura realizarea cinematicii proiectate și a valorii Δ V . În practică, volumul efectiv de debitare Δ V reprezintă uleiul pe care acumulatorul îl furnizează pistonului în timpul cursei de lucru, pentru a compensa aportul insuficient al pompei.
Pentru calculul de proiectare al volumului efectiv de debitare Δ V , consultați Secțiunea 7.5. Pentru a satisface cerințele unui proiect optim, în funcție de obiectivele specifice de proiectare, calculul volumului efectiv de debitare Δ V se modifică în funcție de elementul selectat α u (vezi Secțiunile 7.2.5 și 7.27a).
În acest moment, deși V a a fost determinată și poate fi utilizată pentru proiectarea parametrilor structurali ai acumulatorului, sarcina de calcul proiectual pentru acumulator nu este încă finalizată. Problema cea mai critică este modul în care se controlează presiunea uleiului pentru a asigura obținerea forței echivalente; iar doar prin obținerea forței echivalente se poate garanta cinematica proiectată, ceea ce, la rândul său, asigură Δ V . Cu alte cuvinte, există o relație corespondentă între Δ V și F g .
Trebuie subliniat faptul că, atunci când V a este o valoare fixă, p 1, p 2, și p a poate avea mai multe combinații, realizând mai multe forțe echivalente, mai multe dinamici și mai multe cinematici — adică mai multe valori Δ V date. Următoarea sarcină este, având o valoare fixă V a , pentru a găsi combinația de p 1, p 2, și p a care poate realiza forța echivalentă necesară F g și Δ V . Deoarece, atunci când p a se modifică, U H , f H , Δ V , p 1, și p 2se modifică toate în mod corespunzător. Cu alte cuvinte, trebuie să existe o presiune de încărcare p a care să garanteze obținerea presiunii echivalente p g . Desigur, baza pentru determinarea p a is p 1și p 2, adică presiunea echivalentă p g odată ce relațiile dintre acești parametri sunt înțeleși, se poate studia metoda de determinare a p 1, p 2, și p a din presiunea echivalentă p g poate fi studiată.
Fig. 3-2 prezintă diagrama p –V a acumulatorului de înaltă presiune în timpul funcționării. Pe baza acestei diagrame și combinând cu principiul forței echivalente — lucrul mecanic efectuat de o forță variabilă este egal cu lucrul mecanic efectuat de forța echivalentă — obținem:
p g δ V = ∫ V₂ V₁ p d V (3.19)
În Ec. (3.19):
p = C / V k
Înlocuind în Ec. (3.19) și integrând:
p g δ V = C ∫V₂ V₁ d V / V k = 1 / (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
Prin urmare:
p g δ V = 1 / (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
Eliminând V 1și V 2prin substituție și înlocuirea Ec. (3.17) se obține:
p g = p 1\/ ( k − 1) · ( γ − γ 1/K ) / ( γ 1/K − 1) (3.22)
După rearanjare:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
În Ec. (3.23), p g este presiunea echivalentă aplicată feței pistonului care suportă presiunea. Având în vedere pierderile de presiune din sistem, aceasta trebuie exprimată ca presiune nominală a sistemului p g = p H / K . p 1și p 2obținută în acest mod va fi mai apropiată de valorile reale. Prin urmare:
p 1 = ( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p a = ap 1 (3.26)
În Ec. (3.24), coeficientul de rezistență care ține cont de pierderile de presiune din sistem este K = 1,1–1,2.
Când acumulatorul de înaltă presiune al unui spărgător hidraulic de stâncă funcționează la acești parametri, se garantează obținerea efectului echivalent de forță în mișcare, realizarea cinematicii proiectate și livrarea energiei de impact și a frecvenței de impact necesare. În acest fel, o problemă complexă de calcul este simplificată, iar o problemă neliniară este liniarizată.
În baza celor de mai sus, dispozitivul hidraulic de impact (burghiu hidraulic de stâncă și spărgător hidraulic de stâncă) — un sistem neliniar — este transformat într-un sistem liniar. Din punct de vedere teoretic, pistonul poate efectua cursa S conform oricărui profil, atâta timp cât poate fi controlat și atinge, în punctul de impact, viteza maximă necesară v m — toate acestea sunt realizabile. Pentru fiecare tip de mișcare a pistonului trebuie să existe un corespondent model de variație a forței; cele două sunt legate între ele cauzal, ca efect și cauză. Cu alte cuvinte, oricare ar fi modelul de mișcare al pistonului, trebuie aplicat acestuia un model corespondent de variație a forței — forța este cauza, iar mișcarea este efectul.
Desigur, după proiectarea modelului optim de mișcare, poate fi determinat și modelul corespondent de variație a forței, ridicând astfel două teme teoretice pentru cercetarea ciocanelor hidraulice de spart stânci: cinematica și dinamica ciocanelor hidraulice de spart stânci.

Bine aţi venit la Hovoo, o fabrică chineză de sigilii. Producerea sigiliilor PU, cauciuc şi PTFE. Sigiliile includ inelul O, sigiliul de piston, sigiliul de bară, inelul gri şi sigiliul de gaz.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}