33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]
33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]

Ideea de cercetare din spatele teoriei proiectării variabilelor abstracte: indiferent cum se modifică parametrii de funcționare ai unei ciocane hidraulice pentru stânci în timpul operației, cei doi parametri care satisfac cerințele de proiectare — energia de impact U H și frecvența de impact f H — nu trebuie să se modifice; în ceea ce privește ceilalți parametri, aceștia nu sunt deosebit de importanți pentru proiectant și, în special, nici pentru utilizator. Totuși, proiectantul trebuie să acorde o atenție deosebită cursei pistonului S , deoarece fiecare comportament al pistonului are loc pe o cursă fixă S , iar cursa pistonului S este limitată de structură — nu poate fi arbitrară. O cursă prea mare nu este permisă de structura mecanică; o cursă prea mică nu poate satisface cerințele privind energia de impact și frecvența de impact. Cu alte cuvinte, aceasta reprezintă o constrângere asupra funcționării ciocanelor hidraulice pentru stânci, iar valoarea optimă trebuie să existe.
Modul de abordare a problemei calculului de proiectare a unui spărgător hidraulic de stânci — care este, de fapt, un sistem neliniar — folosind metode liniare constituie conținutul esențial al acestui capitol.
— Bază teoretică pentru transformarea unui sistem neliniar într-un sistem liniar
În timpul funcționării unui spărgător hidraulic de stânci, parametrii de lucru — cum ar fi presiunea din sistem p , viteza pistonului v , accelerația a și sarcina aplicată pistonului — se modifică neliniar și sunt funcții de timp. Calculul unui astfel de sistem este destul de dificil și complex. Totuși, obiectivul de proiectare al acestei cărți este relativ simplu: determinarea parametrilor structurali și a parametrilor de lucru ai unui spărgător hidraulic de stânci care să asigure energia de lovire U H și frecvența f H necesare. Formula energiei de lovire este:
U H = ( m / 2) v 2m (3.1)
unde: m — masa pistonului, constantă;
v m — viteza instantanee la momentul loviturii pistonului în coada burghiului, adică viteza maximă de impact; aceasta este viteza care trebuie garantată în procesul de proiectare.
Există două condiții pentru a asigura atingerea energiei de impact necesare: pistonul trebuie să aibă o anumită masă și o anumită viteză. Pentru un spărgător hidraulic de stânci, masa pistonului m nu se poate modifica în timpul mișcării. Prin urmare, asigurarea energiei de impact înseamnă asigurarea faptului că viteza maximă de impact v m este atinsă.
Trebuie subliniat faptul că mișcarea pistonului are loc pe o cursă dată. Cu alte cuvinte, scopul calculului de proiectare al unui spărgător hidraulic de stânci este de a asigura faptul că, pe o cursă dată, un piston de masă fixă este accelerat cu precizie până la viteza maximă specificată de impact v m în timpul ciclului specificat T , lovind partea posterioară a sculei și generând energia de impact specificată U H . Modificările instantanee ale a , v , și p în timpul mișcării nu sunt importante pentru obiectivul calculului de proiectare și pot fi ignorate. Asigurarea timpului de ciclu T asigură, de asemenea, frecvența specificată de impact f H .
Timp de ciclu T și frecvența de impact f H satisfaci f H = 60 / T , unde T este timpul ciclului de lucru al pistonului (pentru simplificarea calculului, pauza scurtă la punctul de impact este ignorată).
Dacă s-ar putea găsi o metodă simplă de calcul pentru proiectare care să atingă obiectivul de mai sus, aceasta ar fi utilă în proiectarea inginerească. După cum se știe bine, presiunea uleiului hidraulic determină pistonul să efectueze lucru mecanic; pe baza legii conservării energiei și ignorând celelalte pierderi de energie, întreaga cantitate de lucru mecanic se transformă în energie cinetică a pistonului și este transmisă în exterior, rezultând următoarea relație:
(m / 2) v 2m = ∫ 0S F (S ) d S (3.2)
Semnificația fizică a ecuației (3.2): partea dreaptă reprezintă lucrul mecanic efectuat de forța variabilă F (S ) pe cursa S ; partea stângă reprezintă energia cinetică câștigată de piston în timpul deplasării pe cursa S .
Pentru a obține un calcul liniarizat, se poate imagina o forță constantă F g care efectuează același lucru mecanic ca și forța variabilă F (S ) pe aceeași cursă S deci, forța constantă F g poate înlocui forța variabilă F (S ) în calculul liniarizat cu efect echivalent, obținându-se:
(m / 2) v 2m = ∫ 0S F (S ) d S = F g × S (3.3)
Înlocuirea Ec. (3.1) în Ec. (3.3) conduce la:
F g = U H / S (3.4)
În Ec. (3.4), forța constantă F g se numește forță echivalentă; ea efectuează exact aceeași lucrare ca și forța variabilă F (S ).
Ec. (3.4) este formula de calcul a forței echivalente. Energia de impact U H = ( m /2)v 2m este specificată de sarcina de proiectare și reprezintă un parametru cunoscut. Cursa S poate fi determinată prin calcule cinematice și este, de asemenea, cunoscută; prin urmare, forța echivalentă necesară pentru a obține energia de impact dorită poate fi calculată. Alegerea corectă a cursei de proiectare S și a frecvenței f H , precum și optimizarea cursei S , vor fi introduse treptat în capitolele ulterioare.
Această forță echivalentă este foarte utilă în calculele de proiectare ale spargerii hidraulice de stânci. Pe baza forței echivalente, se poate determina aria de rezistență la presiune a pistonului — adică dimensiunile structurale ale pistonului — se pot stabili condițiile de funcționare și volumul efectiv al acumulatorului, iar calculele de cinematică și dinamică pentru spargerea hidraulică de stânci pot fi efectuate.
Aria de rezistență la presiune a pistonului este:
A = F g / p g (3.5)
În Ec. (3.5), p g este presiunea echivalentă a uleiului din sistem, corespunzătoare conceptului de forță echivalentă, și reprezintă o variabilă virtuală. Totuși, având în vedere că mișcarea uleiului implică rezistență, presiunea reală de lucru a sistemului trebuie să fie mai mare decât presiunea echivalentă a uleiului, astfel încât presiunea nominală utilizată în proiectare este:
p H = KP g (3.6)
În Ec. (3.6), K = 1,12 până la 1,15 este coeficientul de rezistență pentru funcționarea sistemului hidraulic. Valoarea lui p H este de fapt ales în funcție de cerințele generale ale sistemului care se proiectează, astfel încât suprafața pistonului supusă presiunii devine calculabilă și cunoscută. Prin urmare:
A = KF g / p H (3.7)
Înlocuind Ec. (3.4) obținem:
A = Kw H \/ ( p H S ) (3.8)
Trebuie subliniat faptul că rezultatele privind cinematica și dinamica calculate pe baza relațiilor de mai sus nu sunt pe deplin realiste — ele sunt descrise ca variind liniar, adică mișcarea pistonului este tratată ca fiind uniform accelerată și uniform decelerată. Totuși, durata ciclului pistonului T , viteza maximă v m și cursa de mișcare S sunt valori reale; pentru îndeplinirea cerințelor de proiectare, acestea sunt simple, practice și precise.
De fapt, întrebarea cea mai importantă este dacă energia de impact U H , frecvența impactului f H , și debitul Q. care antrenează ciocanul hidraulic de spart stânci sunt reale. Deoarece aria pistonului supusă presiunii A este fixă, iar cursa S este fixă, rezultă că debitul pompei Q. este, de asemenea, neapărat real.
În acest fel, aplicarea principiului forței echivalente poate simplifica calculul de proiectare neliniar al ciocanului hidraulic de spart stânci într-unul liniar; atât calculele de cinematică, cât și cele de dinamică pot fi semnificativ simplificate și tratate ca mișcare uniform accelerată și uniform decelerată.
Perspectiva academică privind forța echivalentă constă în ignorarea procesului complex, în captarea esenței problemei și în liniarizarea problemei neliniare. Totuși, rezultatele obținute sunt extrem de reale și fiabile și contribuie la aprofundarea înțelegerii și explorării modelelor de funcționare ale ciocanului hidraulic de spart stânci.
Pe baza principiului forței echivalente, viteza și forțele pistonului sunt prezentate în Fig. 3-1, cuprinzând trei etape: accelerarea cursei de revenire, decelerarea cursei de revenire (frânare) și cursa de lucru.
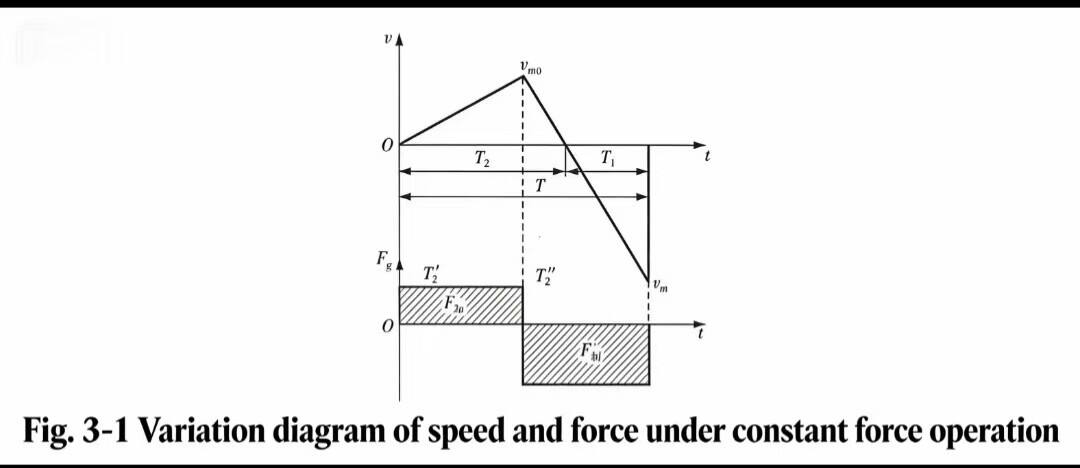
(1) Ecuația dinamică pentru etapa de accelerare a cursei de revenire a pistonului
Fie forța de antrenare a cursei de revenire F 2g , viteza v și accelerația a definite ca [+]. Forța de antrenare echivalentă care accelerează pistonul în timpul cursei de revenire este:
F 2g = p g A ′2 = - Nu! 2 (3.9)
unde: a 2= [+] — accelerația pistonului în timpul cursei de revenire;
A ′2— aria efectivă de presiune a camerei frontale a pistonului;
p g — presiunea echivalentă a sistemului.
(2) Ecuația dinamică pentru etapa de decelerare a cursei de revenire a pistonului
Forța de conducere echivalentă care decelerează pistonul în timpul cursei de revenire este:
F 3 g = p g A ′1 = - Nu! 3 (3.10)
unde: a 3= [−] — decelerarea (frânarea) pistonului în timpul cursei de revenire.
(3) Ecuația dinamică pentru etapa cursei de lucru a pistonului
Forța de conducere echivalentă care accelerează pistonul în timpul cursei de lucru este:
F 1G = p g A ′1 = - Nu! 1 (3.11)
unde: a 1= [−] — accelerația pistonului în timpul cursei de lucru;
A ′1— aria efectivă de rezistență la presiune a camerei posterioare a pistonului.
Conceptul de arie efectivă de rezistență la presiune variază în funcție de cele trei principii de funcționare diferite ale spărgătorului hidraulic de stâncă descrise mai sus; acest aspect este analizat în detaliu în capitolul dedicat dinamicii.

Bine aţi venit la Hovoo, o fabrică chineză de sigilii. Producerea sigiliilor PU, cauciuc şi PTFE. Sigiliile includ inelul O, sigiliul de piston, sigiliul de bară, inelul gri şi sigiliul de gaz.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}