33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]
33-99 Nr. Strada Mufu, Districțul Gulou, Nanjing, China [email protected] | [email protected]

Proiectarea ciocanului hidraulic pentru stânci presupune calcularea parametrilor structurali care să îndeplinească cerințele de performanță stabilite în specificația de proiectare. În cadrul acestor parametri structurali, ciocanul hidraulic pentru stânci poate atinge energia de impact și frecvența de impact necesare.
Trebuie subliniat cu tărie faptul că ciocanul hidraulic pentru stânci generează energia de impact și frecvența de impact prin mișcarea alternativă a pistonului pe o cursă fixă. S în interiorul corpului cilindrului. Pe această cursă fixă, pistonul se deplasează într-un ciclu continuu: accelerare în cursa de revenire → decelerare în cursa de revenire (frânare) → viteza în cursa de revenire scade la zero → accelerare în cursa de lucru → atinge punctul de impact cu viteza maximă v m → atinge partea posterioară a burghiului (transmite energia de impact) → se oprește și începe următorul ciclu. Această cursă fixă S se numește cursă a pistonului; ea reprezintă o bază importantă pentru determinarea dimensiunilor corpului cilindrului.
Pistonul se mișcă alternativ în interiorul corpului cilindrului. Începând din punctul de impact, el accelerează în cursa de revenire pentru a atinge viteza maximă în cursa de revenire v mo , apoi începe să decelereze datorită comutării supapei; viteza scade rapid din v mo la zero — pistonul se oprește la punctul mort superior. Cursa pe care o parcurge pistonul se numește cursă de revenire. În acest moment, deoarece supapa se află încă în starea sa inițială, pistonul începe să accelereze pe cursa de lucru până când atinge punctul de impact. Când pistonul intră în contact cu coada ciocanului, viteza sa a atins valoarea maximă — denumită viteza maximă de impact a pistonului v m . Cursa pe care o parcurge pistonul de la punctul mort superior până la contactul cu coada ciocanului se numește cursă de lucru. Este evident că cursa de revenire și cursa de lucru trebuie să fie egale.
Pentru a studia mai în profunzime teoria proiectării ciocanelor hidraulice pentru spart stânci, este util mai întâi să înțelegem viteza pistonului, presiunile din diversele camere și distribuția și variația debitului în timpul funcționării. Motivele și direcția modificărilor parametrilor de funcționare ai unui ciocan hidraulic pentru spart stânci în timpul funcționării sunt prezentate în Fig. 2-4. 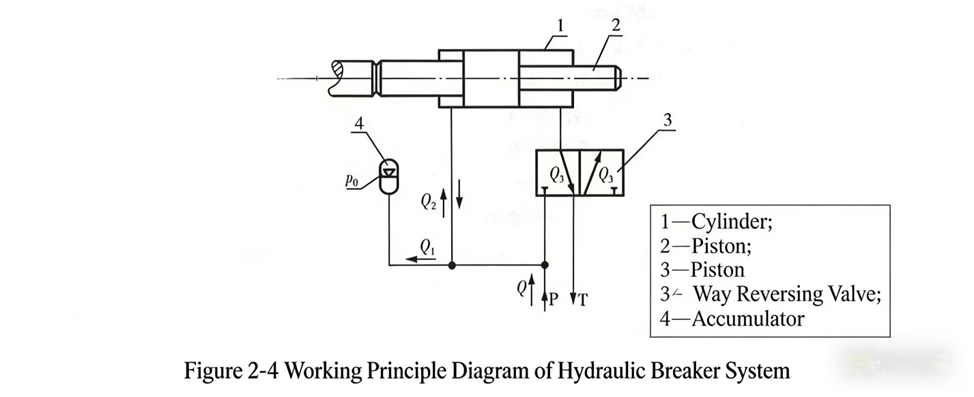
p 0este presiunea inițială de încărcare cu azot a acumulatorului; Q. este debitul furnizat ciocanului hidraulic pentru spart stânci de către pompă; Q. 1este debitul de aspirație (+) și debitul de refulare (−) al acumulatorului; Q. 2este debitul de aspirație (+) și debitul de refulare (−) al camerei frontale a pistonului, cu Q. = Q. 1 + Q. 2. Q. 3este debitul de aspirație (+) și debitul de refulare (−) al camerei posterioare a pistonului; p este presiunea sistemului.
Fig. 2-4 prezintă pistonul la începutul cursei de revenire. Debitul pompei Q. intră în sistem; o parte ( Q. 2) intră în camera frontală a pistonului și determină cursa sa de revenire, în timp ce camera posterioară descarcă uleiul în rezervor ( Q. 3); cealaltă parte ( Q. 1) intră în acumulator și comprimă azotul, astfel încât presiunea sistemului p pornește de la presiunea inițială de încărcare a acumulatorului p 0și crește continuu pe măsură ce Q. 1curge în interior. Mișcarea spargerii hidraulice de stânci, bazată pe starea de funcționare a pistonului, poate fi, în general, împărțită în trei etape, descrise mai jos:
(1) Accelerarea cursei de revenire a pistonului
Pistonul începe cursa de revenire din punctul de impact. Pe măsură ce pompa injectează continuu debit, presiunea sistemului p ↑ → viteza pistonului v ↑ → Q. 2↑ → Q. 1↓ → Q. 3↑, iar uleiul continuă să fie evacuat către rezervor. Deoarece viteza pistonului v ↑ → Q. 2↑ → Q. 1↓, până când Q. 1= 0. Caracteristica acestei perioade este v ↑ și p ↑. Când Q. 1= 0, apare un punct de inflexiune: presiunea p nu mai crește, dar viteza pistonului continuă să crească (deoarece forța motoare pentru cursa de revenire a pistonului există încă). După acest punct de inflexiune, deoarece v ↑, debitul pompei Q. nu mai poate satisface cerința de debit pentru mișcarea pistonului, adică Q. 2 > Q. . Pentru a satisface cerința de debit a camerei frontale a pistonului, acum acumulatorul trebuie să descarce ulei pentru a compensa deficitul pompei. În baza principiului de echilibru al debitelor, Q. 2 = Q. + Q. 1; în acest moment Q. 1este debitul care curge din acumulator către camera frontală a pistonului, până când v ↑ la v = v mo , supapa comută și pistonul intră în faza de decelerare a cursei de revenire.
(2) Decelerarea cursei de revenire a pistonului
În timpul cursei de revenire, deoarece umărul frontal al pistonului a trecut de orificiul de reacție, supapa comută și inversează direcția forței aplicate pistonului; forța de antrenare este aplicată pistonului în sens invers, iar pistonul începe să decelereze până când v = 0. Cursa de revenire este acum finalizată; pistonul a ajuns în punctul mort superior și a parcurs întreaga cursă S , pregătindu-se pentru începerea cursei de lucru.
(3) Cursa de lucru a pistonului
Când viteza pistonului scade la v = 0, forța aplicată pistonului se inversează, astfel încât viteza pistonului v se inversează, trecând de la '+' la '−'. Pistonul începe apoi să accelereze în timpul cursei de lucru sub acțiunea forței inverse. La începutul accelerării cursei de lucru, viteza pistonului pornește de la v = 0, moment în care consumul de ulei al pistonului Q. 3= 0; întreaga debitare a pompei Q. curge în acumulator, Q. 1 = Q. , Q. 2= 0. Pe măsură ce viteza cursei de lucru v ↑ → Q. 3↑ → Q. 1↓ → Q. 2(−)↑. Se observă aici faptul că, deoarece aria camerei frontale A 2este mai mică decât aria camerei posterioare A 1, pe baza principiului de echilibru al debitului, trebuie să existe Q. 3 = Q. 2 + Q. − Q. 1, cu v ↑ și Q. 1↓, până când Q. 1= 0. Aceasta înseamnă v ↑; în acest moment întreaga debitare a pompei Q. este injectată integral în camera posterioară a pistonului, adică Q. 3 = Q. , Q. 1= 0, dar viteza pistonului v nu a atins încă viteza maximă v m . Pistonul continuă să accelereze; debitul pompei Q. nu mai poate satisface cerința, astfel încât acumulatorul începe să completeze debitul, adică Q. 3 = Q. + Q. 1(−), până când pistonul lovește coada ciocanului la viteza maximă v m . În momentul impactului, viteza pistonului devine brusc v = 0, iar pistonul transmite energia de impact U în exterior, finalizând un ciclu de lucru.
Deoarece debitul de admisie/evacuare al acumulatorului Q. 1se modifică, presiunea din sistem p se modifică, de asemenea, corespunzător. La încărcarea acumulatorului, Q. 1= '+', presiunea sistemului p ↑; când acumulatorul se descarcă în exterior, Q. 1= '−', presiunea sistemului p ↓. Cu alte cuvinte, procesul de funcționare al unui spartor hidraulic de stânci este întotdeauna însoțit de variații ale presiunii sistemului. Atunci când cantitatea maximă de ulei a fost încărcată în acumulator, presiunea sistemului atinge valoarea cea mai mare. Atunci când pistonul a ajuns în punctul de impact, acumulatorul a descărcat cea mai mare cantitate de ulei — acesta este momentul presiunii sistemului minime. Prin urmare, de la pornirea spartorului hidraulic de stânci până la atingerea regimului stabil de funcționare, presiunea de lucru a sistemului său p oscilează întotdeauna între o presiune maximă p max și o presiune minimă p min , fiind absolut imposibil ca aceasta să rămână constantă și neschimbată. Fig. 2-5 prezintă variația tuturor parametrilor sistemului în timpul funcționării spartorului hidraulic de stânci. 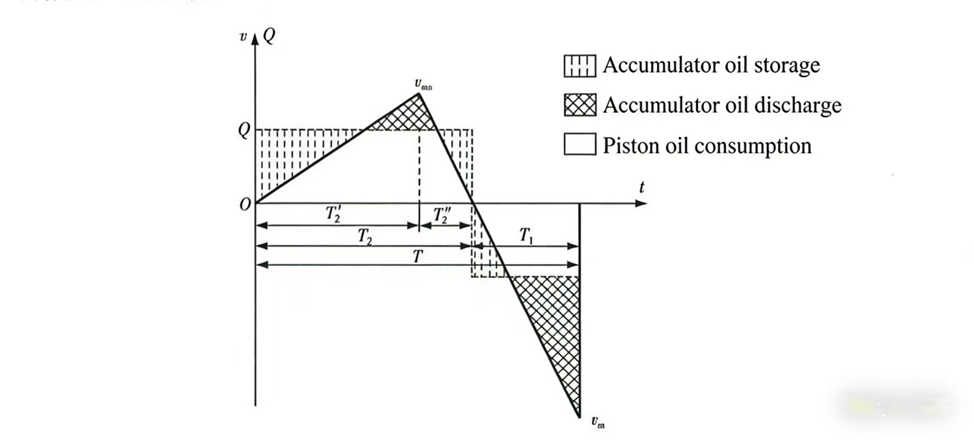
Fig. 2-5 Variația parametrilor sistemului în timpul funcționării unui spărgător hidraulic de stâncă [Legendă: hașurat = încărcarea acumulatorului; hașurat în cruce = descărcarea acumulatorului; alb = consumul de ulei al pistonului]
Procesul de lucru descris mai sus arată că variația parametrilor de funcționare este destul de complexă — este un sistem neliniar. Aceasta creează dificultăți considerabile pentru analiza teoretică și cercetarea aprofundată. De fapt, aceasta este una dintre principalele cauze pentru care cercetarea teoretică privind spărgătoarele hidraulice de stâncă a rămas în urmă față de dezvoltarea produselor.
Cercetătorii din întreaga lume au adoptat, în general, două abordări tehnice diferite în cadrul cercetării teoretice privind dispozitivele hidraulice de impact (spărgătoarele hidraulice de stâncă): cercetare bazată pe teoria sistemelor liniare și cercetare bazată pe teoria sistemelor neliniare.
1) Cercetarea bazată pe teoria sistemelor liniare presupune că forța exercitată asupra pistonului este constantă, viteza pistonului crește liniar, cu o rată uniformă, iar anumite factori de influență sunt ignorați; pe această bază se construiește un model matematic liniar pentru cercetarea teoretică. Această metodă de cercetare este, în mod evident, simplă și poate rezolva unele probleme practice, dar nu este foarte precisă și prezintă erori considerabile.
2) Cercetarea bazată pe teoria sistemelor neliniare folosește ecuații diferențiale neliniare de ordin superior pentru a descrie modelele de mișcare ale spargerii hidraulice de stânci și redă, în mod mai precis, cinematica și dinamica pistonului spargerii hidraulice de stânci. Această cercetare neliniară este mai precisă decât cea liniară, dar continuă să se bazeze pe unele ipoteze. Deși poate evidenția mai precis unele fenomene fizice ale impactului hidraulic, este dificil de rezolvat, nu este ușor de interpretat și poate furniza doar soluții numerice prin calcul computerizat, ceea ce o face incomod de utilizat.
În plus față de aceste două abordări, autorii, după mulți ani de cercetare dedicată, au propus Teoria Proiectării cu Variabile Abstracte pentru Frânghetoarele Hidraulice de Rupere a Rocilor (mecanisme de impact hidraulic). Folosind teoria proiectării cu variabile abstracte, se pot obține soluții analitice pentru frânghetoarele hidraulice de rupere a rocilor, care pot dezvălui în profunzime modelele interne ale mișcării acestora și pot oferi o bază teoretică pentru inovația tehnică realizată de utilizatori.
Abordarea cercetării teoriei proiectării cu variabile abstracte pentru spărgătoarele hidraulice de stâncă: recunoașterea neliniarității parametrilor de funcționare ai spărgătoarelor hidraulice de stâncă, dar utilizarea transformării forței echivalente pentru liniarizarea sistemului neliniar, astfel încât acesta să poată fi studiat cu metode specifice sistemelor liniare pentru obținerea unor soluții analitice. Parametrii de funcționare și cei structurali ai spărgătoarelor hidraulice de stâncă obținuți prin această metodă sunt destul de preciși, iar calculul este simplu. Teoria proiectării cu variabile abstracte pentru spărgătoarele hidraulice de stâncă va fi tratată în mod specific în capitolele ulterioare.

Bine aţi venit la Hovoo, o fabrică chineză de sigilii. Producerea sigiliilor PU, cauciuc şi PTFE. Sigiliile includ inelul O, sigiliul de piston, sigiliul de bară, inelul gri şi sigiliul de gaz.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}