33-99No. Муфу И Роуд, район Гулоу, Нанкин, Китай [email protected] | [email protected]
33-99No. Муфу И Роуд, район Гулоу, Нанкин, Китай [email protected] | [email protected]

Идея исследования, лежащая в основе теории проектирования абстрактных переменных: независимо от того, как изменяются рабочие параметры гидравлического отбойного молотка в процессе эксплуатации, два параметра, удовлетворяющие требованиям проектирования — энергия удара Ш H и частота ударов f H — не должны изменяться; остальные же параметры не представляют особой важности ни для конструктора, ни тем более для пользователя. Однако конструктору следует уделить особое внимание ходу поршня S , поскольку каждое движение поршня происходит на фиксированном ходе S , и ход поршня S ограничен конструкцией — он не может быть произвольным. Слишком большой ход не допускается механической конструкцией; слишком малый ход не позволяет удовлетворить требования по энергии удара и частоте ударов. Другими словами, это ограничение, накладываемое на работу гидравлического отбойного молотка, и должно существовать оптимальное значение.
Как решать задачу расчёта конструкции гидравлического отбойного молотка — который на самом деле представляет собой нелинейную систему — с использованием линейных методов, является основным содержанием данной главы.
— Теоретическая основа преобразования нелинейной системы в линейную
При работе гидравлического отбойного молотка рабочие параметры — такие как давление в системе p , скорость поршня v , ускорение а , а также нагрузка на поршень — все изменяются нелинейно и являются функциями времени. Расчёт такой системы достаточно сложен и трудоёмок. Однако целевая задача проектирования, рассматриваемая в данной книге, относительно проста: определить конструктивные и рабочие параметры гидравлического отбойного молотка, способного обеспечить требуемую энергию удара Ш H и частотой f H . Формула энергии удара:
Ш H = ( м / 2) v 2м (3.1)
где: м — масса поршня, постоянная величина;
v м — мгновенная скорость в момент удара поршня по хвостовику долота, т.е. максимальная скорость удара; именно эту скорость необходимо обеспечить при проектировании.
Существует два условия для достижения требуемой энергии удара: поршень должен обладать определённой массой и определённой скоростью. В случае гидравлического отбойного молотка масса поршня м не изменяется в процессе движения. Следовательно, обеспечение требуемой энергии удара означает обеспечение достижения максимальной скорости удара v м .
Следует отметить, что движение поршня происходит на заданном ходе. Другими словами, цель расчётного проектирования гидравлического отбойного молотка заключается в том, чтобы на заданном ходе поршень фиксированной массы точно разгонялся до заданной максимальной скорости удара v м в пределах заданного времени цикла T , ударяя по хвостовику зубила и обеспечивая заданную энергию удара Ш H . Мгновенные изменения а , v , и p в процессе движения не имеют значения для целей расчётного проектирования и могут быть проигнорированы. Обеспечение времени цикла T также гарантирует заданную частоту ударов f H .
Время цикла T и частота ударов f H удовлетворить f H = 60 / T , где T — это время рабочего цикла поршня (для упрощения расчётов краткая пауза в точке удара не учитывается).
Если бы удалось найти простой метод расчета конструкции для достижения указанной выше цели, это было бы полезно для инженерного проектирования. Как известно, давление гидравлического масла приводит поршень в движение и заставляет его выполнять работу; на основе закона сохранения энергии и при пренебрежении другими потерями энергии вся эта работа преобразуется в кинетическую энергию поршня и передаётся наружу, что даёт следующее соотношение:
(м / 2) v 2м = ∫ 0S F (S ) D S (3.2)
Физический смысл уравнения (3.2): правая часть — это работа, совершаемая переменной силой F (S ) на ходе S ; левая часть — кинетическая энергия, приобретённая поршнем при перемещении на этом ходе. S .
Для линеаризованного расчёта можно представить постоянную силу F g , совершающую такую же работу, как и переменная сила F (S ), на том же ходе S . Таким образом, постоянная сила F g может заменить переменную силу F (S ) в линеаризованном расчете с равным эффектом, получаем:
(м / 2) v 2м = ∫ 0S F (S ) D S = F g × S (3.3)
Подстановка уравнения (3.1) в уравнение (3.3) дает:
F g = Ш H / S (3.4)
В уравнении (3.4) постоянная сила F g называется эквивалентной силой; она совершает точно такую же работу, как и переменная сила F (S ).
Уравнение (3.4) — это формула для расчета эквивалентной силы. Энергия удара Ш H = ( м /2)v 2м задается техническим заданием на проектирование и является известным параметром. Ход S может быть определен из кинематических расчетов и также известен; следовательно, требуемая эквивалентная сила, необходимая для достижения заданной энергии удара, может быть рассчитана. Правильный выбор проектного хода S и частоты f H , а также оптимизация хода S , будут постепенно рассмотрены в последующих главах.
Эта эквивалентная сила чрезвычайно полезна при расчётах конструкции гидравлического отбойного молотка. На основе эквивалентной силы можно определить площадь поршня, воспринимающую давление, то есть конструктивные размеры поршня, установить рабочие условия и эффективный объём аккумулятора, а также выполнить кинематические и динамические расчёты гидравлического отбойного молотка.
Площадь поршня, воспринимающая давление:
А = F g / p g (3.5)
В уравнении (3.5), p g — это эквивалентное давление масла в системе, соответствующее понятию эквивалентной силы, и является виртуальной переменной. Однако с учётом того, что движение масла связано с сопротивлением, фактическое рабочее давление масла в системе должно быть выше эквивалентного давления масла, поэтому расчётное давление, используемое при проектировании, определяется следующим образом:
p H = КП g (3.6)
В уравнении (3.6), К = 1,12–1,15 — коэффициент сопротивления при работе гидравлической системы. Значение p H на практике выбирается исходя из общих требований к проектируемой системе, поэтому площадь поршня, воспринимающая давление, становится расчётной и известной. Следовательно:
А = KF g / p H (3.7)
Подстановка уравнения (3.4) даёт:
А = КВт H / ( p H S ) (3.8)
Следует отметить, что кинематические и динамические результаты, рассчитанные по приведённым выше соотношениям, не являются полностью реалистичными — они описываются как линейно изменяющиеся, то есть движение поршня рассматривается как равнопеременное (равноускоренное при разгоне и равнозамедленное при торможении). Однако время цикла поршня T , максимальная скорость v м , и ход движения S являются реальными величинами; для выполнения проектных требований они просты, практичны и точны.
Фактически, наиболее важным вопросом является то, достаточна ли энергия удара Ш H , частота ударов f H , и поток Q управляющие гидравлический отбойный молоток, являются реальными. Поскольку площадь поршня, воспринимающая давление, А постоянна, а ход S тоже постоянен, следует, что расход насоса Q неизбежно также является реальным.
Таким образом, применение принципа эквивалентной силы позволяет упростить нелинейный расчёт проектирования гидравлического отбойного молотка до линейного; как кинематические, так и динамические расчёты могут быть существенно упрощены и рассматриваться как движение с равномерным ускорением и равномерным замедлением.
Научная идея эквивалентной силы заключается в игнорировании сложного процесса, выявлении сути проблемы и линеаризации нелинейной задачи. Однако получаемые результаты являются весьма реальными и надёжными и способствуют углублению понимания и исследованию закономерностей работы гидравлического отбойного молотка.
На основе принципа эквивалентных сил скорость и силы, действующие на поршень, показаны на рис. 3-1 и включают три этапа: ускорение на ходе обратного движения, замедление на ходе обратного движения (торможение) и рабочий ход.
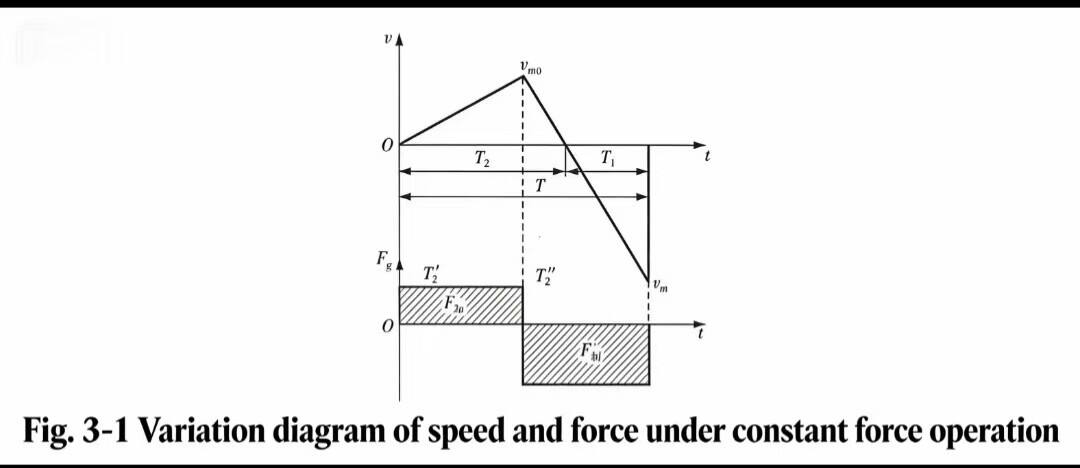
(1) Уравнение динамики для этапа ускорения поршня на ходе обратного движения
Пусть сила привода на ходе обратного движения F 2г , скорость v и ускорение а определяются как [+]. Эквивалентная сила привода, ускоряющая поршень на ходе обратного движения, равна:
F 2г = p g А ′2 = mA 2 (3.9)
где: а 2= [+] — ускорение поршня на ходе обратного движения;
А ′2— эффективная площадь поршневой передней полости, воспринимающая давление;
p g — эквивалентное давление в системе.
(2) Уравнение динамики для этапа замедления поршня на ходе обратного движения
Эквивалентная движущая сила, замедляющая поршень на обратном ходе:
F 3 г = p g А ′1 = mA 3 (3.10)
где: а 3= [−] — замедление (торможение) поршня на обратном ходе.
(3) Уравнение динамики для стадии рабочего хода поршня
Эквивалентная движущая сила, ускоряющая поршень на рабочем ходе:
F 1Г = p g А ′1 = mA 1 (3.11)
где: а 1= [−] — ускорение поршня на рабочем ходе;
А ′1— эффективная площадь поршня, воспринимающая давление в задней камере.
Понятие эффективной площади, воспринимающей давление, различается в зависимости от трёх различных принципов работы гидравлического отбойного молотка, описанных выше; подробно оно рассматривается в главе, посвящённой динамике.

Добро пожаловать в HOVOO, китайскую фабрику уплотнений. Производство уплотнений из ПУ, резины и ПТФЭ. Уплотнения включают О-кольцо, поршневое уплотнение, валовое уплотнение, серое кольцо и газовое уплотнение.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}