33-99No. Муфу И Роуд, район Гулоу, Нанкин, Китай [email protected] | [email protected]
33-99No. Муфу И Роуд, район Гулоу, Нанкин, Китай [email protected] | [email protected]

В теории каждый гидравлический отбойный молоток требует аккумулятора переменного давления — особенно крупного аккумулятора высокого давления.
Аккумулятор высокого давления, установленный на входе системы гидравлического отбойного молотка, выполняет три функции:
(1) Для балансирования избытка и дефицита подачи системы и потребления масла. Когда подача насоса превышает потребление масла системой, высоконапорный аккумулятор поглощает избыточную подачу и выполняет функцию устройства хранения масла. Когда подача насоса меньше потребления масла системой, он подаёт масло для компенсации дефицита и выполняет функцию устройства подачи масла. Высоконапорный аккумулятор обеспечивает балансирование избытка и дефицита потока в системе и является важным компонентом для стабильной работы системы.
(2) Для поглощения колебаний давления в системе и снижения мелких скачков давления, что защищает трубопроводы и гидравлические компоненты и увеличивает их срок службы.
(3) При проектировании гидравлических ударных механизмов с использованием абстрактной теории переменных он способствует реализации эквивалентной силы. При условии правильного проектирования аккумулятора может быть получена точная эквивалентная сила, что гарантирует достижение требуемых кинематических и динамических характеристик системы.
Учитывая важную роль высоконапорного аккумулятора в гидравлической системе отбойного молотка — и особенно его особую функцию по обеспечению требуемых кинематики и динамики системы — разработка корректной теории и метода проектирования высоконапорного аккумулятора имеет большое значение.
Эффективный объём разряда является важным эксплуатационным параметром аккумулятора, а также основой для расчётов при проектировании аккумулятора. При стационарном режиме работы гидравлического отбойного молотка максимальный объём масла, который аккумулятор накапливает и отдаёт за один цикл, называется эффективным объёмом разряда и обозначается Δ V .
Эффективный объём разряда Δ V связан с кинематическими характеристиками. При постоянном расходе насоса и фиксированных конструкции и кинематике гидравлического отбойного молотка энергия удара Ш H , частота f H и эффективный объём разряда Δ V все обязательно фиксированы. Поэтому при проектировании аккумулятора эффективный объем разряда уже известен. Как рассчитать Δ V будет рассмотрено в последующих главах.
Основой для расчета эффективного объема аккумулятора V а является его реальный эффективный объем разряда Δ V . Когда Δ V действует внутри аккумулятора, это неизбежно приводит к изменению давления масла в системе, и эквивалентная сила F g должна оставаться постоянной. Следовательно, необходимо изучить метод расчета аккумулятора, удовлетворяющий указанным выше требованиям. Диаграмма зависимости давления (силы) от объема аккумулятора в процессе его работы приведена на рис. 3-2.
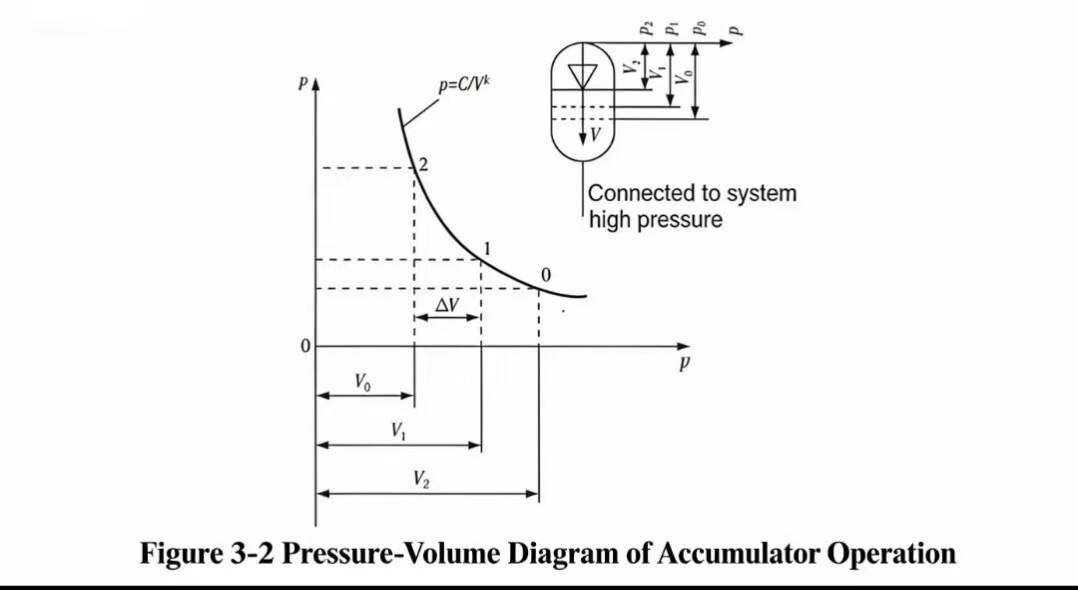
Хотя рабочая частота гидравлического отбойного молотка невелика, процесс сжатия и расширения азота внутри него протекает достаточно быстро, и времени для теплообмена с окружающей средой недостаточно; поэтому его можно рассматривать как адиабатический процесс. Из уравнения состояния газа:
p 1V к 1 = p 2V к 2 = p а V к а (3.12)
где: p а — давление зарядки, т.е. давление герметизированного газа;
V а — объем зарядки, т.е. объем аккумулятора при положении поршня в точке удара (обычно максимальный рабочий объем); V amax );
p 2— максимальное рабочее давление;
V 2— объем, соответствующий p 2(обычно минимальный рабочий объем); V 2мин );
p 1— минимальное рабочее давление;
V 1— объем, соответствующий p 1, V 1 < V а .
В уравнении (3.12), к = 1,4 — показатель адиабаты. Очевидно:
δ V = V 1 − V 2 (3.13)
Из уравнения (3.12):
V 1 = V а (p а / p 1)1/К (3.14)
V 2 = V 1 (p 1 / p 2)1/К (3.15)
Подстановка в уравнение (3.13) даёт:
δ V = V а (p а / p 1)1/К [1 − 1 / ( p 2 / p 1)1/К ] (3.16)
В уравнении (3.16) обозначим p а / p 1 = а = 0,8–1; а отношение рабочего давления газа γ = p 2 / p 1, как правило, γ = 1,2–1,45, выбирается на основе рабочих характеристик гидравлического отбойного молотка. При а = 1 минимальное рабочее давление поршня равно давлению предварительной зарядки ( p а = p 1); в этом состоянии V 1 = V а . Чтобы предотвратить соприкосновение мембраны аккумулятора с основанием при минимальном рабочем давлении гидравлического отбойного молотка — что сократило бы срок службы — а должно быть установлено менее 1.
При выборе следует учитывать два аспекта γ : когда γ велико, поскольку аккумулятор работает в адиабатическом режиме, температура резко повышается, что может привести к преждевременному старению мембраны аккумулятора или даже к её перегоранию; однако увеличение γ эффективно снижает эффективный объём V а аккумулятора, что весьма выгодно для уменьшения габаритных размеров аккумулятора. Конструктор должен взвесить все «за» и «против» и принять решение с учётом условий эксплуатации; следовательно:
δ V = V а а 1/К (1 − 1 / γ 1/К ) (3.17)
Из уравнения (3.17) можно определить эффективный объём аккумулятора:
V а = Δ Vγ 1/К / [ а 1/К (γ 1/К − 1)] (3.18)
Уравнение (3.18) показывает, что по эффективному объёму нагнетания Δ V можно определить соответствующий объём подачи, чтобы обеспечить заданную кинематику и значение Δ V на практике эффективный объём нагнетания Δ V представляет собой масло, которое аккумулятор подаёт в поршень в течение рабочего хода для компенсации недостаточной подачи насоса.
Для расчёта эффективного объёма нагнетания Δ V см. раздел 7.5. Чтобы удовлетворить требования оптимального проектирования, при различных целевых задачах расчёт эффективного объёма нагнетания Δ V меняется в зависимости от выбранного α u (см. разделы 7.2.5 и 7.27а).
На данном этапе, хотя V а уже определено и может быть использовано для проектирования конструктивных параметров аккумулятора, задача расчёта аккумулятора ещё не завершена. Наиболее важным вопросом является то, как управлять давлением масла, чтобы обеспечить достижение эквивалентной силы; только при достижении эквивалентной силы можно гарантировать спроектированную кинематику, что, в свою очередь, гарантирует Δ V . Иными словами, между Δ V и F g .
Следует подчеркнуть, что когда V а является фиксированным значением, p 1, p 2, и p а может иметь множество комбинаций, обеспечивающих различные эквивалентные силы, различные динамические характеристики и различные кинематические параметры — то есть различные значения Δ V задача, стоящая далее, заключается в том, чтобы при заданном фиксированном V а , найти комбинацию p 1, p 2, и p а , позволяющую достичь требуемой эквивалентной силы F g и Δ V . Поскольку при изменении p а изменяются Ш H , f H , Δ V , p 1, и p 2все соответствующим образом изменяются. Другими словами, должно существовать давление подачи p а , обеспечивающее достижение эквивалентного давления p g . Разумеется, основой для определения p а is p 1и p 2, то есть эквивалентного давления p g . Как только зависимости между этими параметрами становятся известными, можно определить метод нахождения p 1, p 2, и p а по эквивалентному давлению p g может быть изучено.
Рис. 3-2 иллюстрирует p –V диаграмму высоконапорного аккумулятора в процессе работы. Исходя из этой диаграммы и с учётом принципа эквивалентной силы — работа, совершаемая переменной силой, равна работе, совершаемой эквивалентной силой, — получаем:
p g δ V = ∫ V₂ V₁ p d V (3.19)
В уравнении (3.19):
p = C / V к
Подставляя в уравнение (3.19) и интегрируя:
p g δ V = C ∫V₂ V₁ d V / V к = 1 / (1 − к ) ( p 1V к 1V 1−k 1 − p 2V к 2V 1−k 2) (3.20)
Следовательно:
p g δ V = 1 / (1 − к ) ( p 1V 1 − p 2V 2) (3.21)
Устраняет V 1и V 2путём подстановки и замены уравнения (3.17) получаем:
p g = p 1/ ( к − 1) · ( γ − γ 1/К ) / ( γ 1/К − 1) (3.22)
После перегруппировки:
p 1 = p g (к − 1) ( γ 1/К − 1) / ( γ − γ 1/К ) (3.23)
В уравнении (3.23) p g — эквивалентное давление, приложенное к рабочей поверхности поршня, воспринимающей давление. С учётом потерь давления в системе его следует выражать как номинальное давление системы p g = p H / К . p 1и p 2полученное таким образом, будет ближе к действительным значениям. Следовательно:
p 1= ( p H / К )(к − 1) ( γ 1/К − 1) / ( γ − γ 1/К ) (3.24)
p 2 = γp 1 (3.25)
p а = аП 1 (3.26)
В уравнении (3.24) коэффициент сопротивления, учитывающий потери давления в системе, равен К = 1,1–1,2.
Когда гидравлический отбойный молоток работает при указанных параметрах, обеспечивается достижение требуемого эквивалентного силового эффекта движения, реализация заданной кинематики, а также доставка необходимой ударной энергии и частоты ударов. Таким образом, сложная расчётная задача упрощается, а нелинейная задача линеаризуется.
Исходя из вышесказанного, гидравлическое ударное устройство (гидравлический горный отбойный молоток и гидравлический горный отбойник) — нелинейная система — преобразуется в линейную систему. С теоретической точки зрения поршень может перемещаться по ходу S по любому закону, при условии, что его движение поддаётся управлению и в точке удара он достигает требуемой максимальной скорости v м — всё это технически осуществимо. Для каждого закона движения поршня должен существовать соответствующий закон изменения силы; эти два закона связаны как причина и следствие. Иными словами, каким бы ни был закон движения поршня, к нему необходимо приложить соответствующий закон изменения силы — сила является причиной, а движение — следствием.
Разумеется, после разработки оптимального закона движения поршня можно также определить соответствующий закон изменения силы, что ставит перед исследованием гидравлического горного отбойника две теоретические задачи: кинематику и динамику гидравлического горного отбойника.

Добро пожаловать в HOVOO, китайскую фабрику уплотнений. Производство уплотнений из ПУ, резины и ПТФЭ. Уплотнения включают О-кольцо, поршневое уплотнение, валовое уплотнение, серое кольцо и газовое уплотнение.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}