33-99 č. Mufu E cesta, okres Gulou, Nanjing, Čína [email protected] | [email protected]
33-99 č. Mufu E cesta, okres Gulou, Nanjing, Čína [email protected] | [email protected]

Návrh hydraulického kameňolomu znamená výpočet konštrukčných parametrov, ktoré spĺňajú požiadavky na výkon stanovené v technickej špecifikácii návrhu. Pri týchto konštrukčných parametroch môže hydraulický kameňolom dosiahnuť požadovanú nárazovú energiu a nárazovú frekvenciu.
Je potrebné zdôrazniť, že hydraulický kameňolom generuje nárazovú energiu a nárazovú frekvenciu prostredníctvom pohybu piesta tam a späť v rámci pevne daného zdvihu. S vnútri telesa valca. Pri tomto pevnom zdvihu sa piest pohybuje v nepretržitom cykle: zrýchlenie pri návratnom zdvihu → spomalenie pri návratnom zdvihu (brzdenie) → rýchlosť pri návratnom zdvihu klesne na nulu → zrýchlenie pri pracovnom zdvihu → dosiahne bod nárazu pri maximálnej rýchlosti v m → narazí do chvostovej časti dláta (uvádza do činnosti energiu nárazu) → zastane a začne ďalší cyklus. Tento pevný zdvih S sa nazýva zdvih piesta; je dôležitým základom pre určenie rozmerov telesa valca.
Piest sa pohybuje v telese valca tam a späť. Začínajúc od bodu nárazu sa pri návratnom zdvihu zrýchľuje, aby dosiahol maximálnu rýchlosť pri návratnom zdvihu v mo , potom sa v dôsledku prepínania ventilov začne spomaľovať; rýchlosť rýchlo klesne z v mo na nulu — piest sa zastaví v hornej mŕtvej polohe. Zážih, ktorý piest prejde, sa nazýva návratný zdvih. V tomto okamihu, keďže ventil je stále v pôvodnom stave, piest začne zrýchľovať počas pracovného zdvihu, kým nenarazí na nárazový bod. Keď piest narazí na chvost kladiva, dosiahne maximálnu rýchlosť — tzv. maximálnu nárazovú rýchlosť piesta v m . Zdvih, ktorý piest prejde od hornej mŕtvej polohy po náraz na chvost kladiva, sa nazýva pracovný zdvih. Zrejme musia byť návratný a pracovný zdvih rovnaké.
Ak chceme hlbšie študovať teóriu návrhu hydraulických kladív, je užitočné najprv pochopiť rýchlosť piesta, tlaky v jednotlivých komorách a rozdelenie a zmenu prietoku počas prevádzky. Dôvody a smer zmeny prevádzkových parametrov hydraulického kladiva počas prevádzky sú znázornené na obr. 2-4. 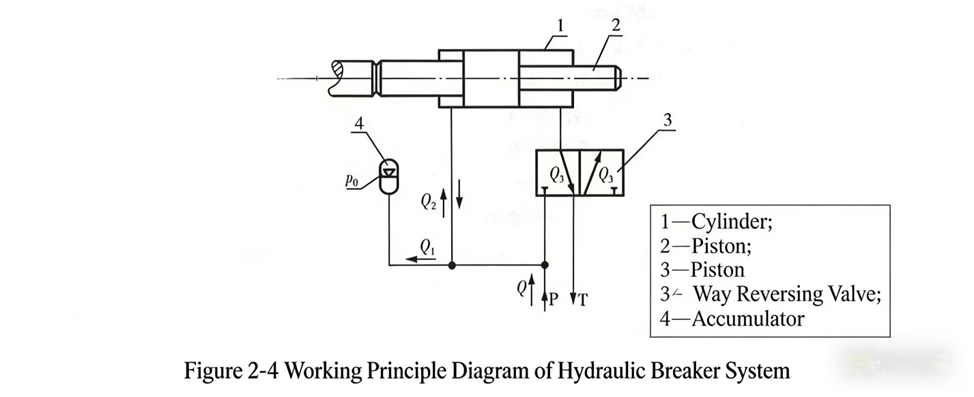
p 0je tlak prednabíjania akumulátora dusíkom; Q je prietok dodávaný hydraulickému kladivu čerpadlom; Q 1je prietok do akumulátora (+) a výtok z akumulátora (−); Q 2je prietok do prednej komory piesta (+) a výtok z prednej komory piesta (−), pričom Q = Q 1 + Q 2. Q 3je prietok do zadnej komory piesta (+) a výtok zo zadnej komory piesta (−); p je tlak v systéme.
Obr. 2-4 znázorňuje piest na začiatku návratového zdvihu. Prietok čerpadla Q vstupuje do systému; jedna časť ( Q 2) vstupuje do prednej komory piesta a spôsobuje jeho návratový zdvih, zatiaľ čo zadná komora vytláča olej do nádrže ( Q 3); druhá časť ( Q 1) vstupuje do akumulátora a stláča dusík, takže tlak v systéme p sa začína od prednabíjacieho tlaku akumulátora p 0a neustále stúpa, keď Q 1prúdi dovnútra. Pohyb hydraulického kameňolomu, založený na pracovnom stave piesta, sa všeobecne delí na tri fázy, ktoré sú popísané nižšie:
(1) Návratové zrýchlenie piesta
Piest začína návratový zdvih z miesta nárazu. Keď čerpadlo neustále privádza kvapalinu, tlak v systéme p ↑ → rýchlosť piesta v ↑ → Q 2↑ → Q 1↓ → Q 3↑ a olej sa naďalej vyvádza do nádrže. Keďže rýchlosť piesta v ↑ → Q 2↑ → Q 1↓, kým Q 1= 0. Charakteristickou vlastnosťou tohto obdobia je v ↑ a p ↑. Keď Q 1= 0, vyskytne sa inflexný bod: tlak p už viac nerastie, ale rýchlosť piesta stále narastá (pretože pohonná sila pre návratný zdvih piesta stále existuje). Po tomto inflexnom bode, keď v ↑, prietok čerpadla Q už nedokáže uspokojiť požiadavku na prietok vyvolanú pohybom piesta, t. j. Q 2 > Q . Aby sa uspokojila požiadavka na prietok prednej komory piesta, akumulátor musí teraz vypúšťať olej, aby doplnil nedostatok čerpadla. Na základe zásady rovnováhy prietokov Q 2 = Q + Q 1; v tomto okamihu Q 1je prietok oleja vypúšťaného z akumulátora do prednej komory piesta, kým v ↑ na v = v mo , ventil prepína a piest vstupuje do fázy spätného zdvihu s brzdením.
(2) Spätný zdvih piesta s brzdením
Počas spätného zdvihu, keď predná hrana piesta prejde spätnou otvorom, sa ventil prepne a zmení smer sily pôsobiacej na piest; pohonná sila pôsobí na piest v opačnom smere a piest začne brzdiť až do v = 0. Spätný zdvih je teraz dokončený; piest dosiahol hornú mŕtvu polohu a prešiel celý zdvih S , pripravený na začatie pracovného zdvihu.
(3) Pracovný zdvih piesta
Keď rýchlosť piesta klesne na v = 0, sila pôsobiaca na piest sa obráti, čo spôsobí obrátenu rýchlosti piesta v tiež v opačnom smere, teda znamienko sa zmení z „+“ na „−“. Piest potom začne zrýchľovať počas pracovného zdvihu pod vplyvom obrátenej sily. Na začiatku zrýchlenia pracovného zdvihu sa rýchlosť piesta začína od v = 0, v tomto okamihu sa spotrebuje olej piesta Q 3= 0; celý výtlak čerpadla Q prúdi do akumulátora, Q 1 = Q , Q 2= 0. Treba tu poznamenať, že vzhľadom na to, že plocha prednej komory v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. Treba tu poznamenať, že pretože plocha prednej komory A 2je menšia ako plocha zadnej komory, A 1musí na základe princípu vyváženia toku platiť Q 3 = Q 2 + Q − Q 1, s v ↑ a Q 1↓, kým Q 1= 0. To znamená, že v ↑; v tomto okamihu je celý výtlak čerpadla Q úplne privedený do zadnej komory piesta, t. j. Q 3 = Q , Q 1= 0, avšak rýchlosť piesta v ešte nedosiahol maximálnu rýchlosť v m - Čo? Zstuh pokračuje v zrýchľovaní; prietok čerpadla Q akumulátor sa začne doplňovať, t. j. Q 3 = Q + Q 1(−), kým piest nezasiahne chvost dláždi na maximálnej rýchlosti v m - Čo? V okamihu nárazu sa rýchlosť pištole náhle stáva v = 0, a výstupy piestov ovplyvňujú energiu V externým spôsobom, dokončenie jedného pracovného cyklu.
Ako prietok vstupu/vypustenia akumulátora Q 1zmeny, tlak systému p tiež sa zodpovedajúcim spôsobom mení. Pri nabíjaní akumulátora Q 1= '+', systémový tlak p ↑; keď akumulátor vypúšťa kvapalinu von, Q 1= '−', systémový tlak p ↓. Inými slovami, pracovný proces hydraulického kameňolomného zariadenia je vždy sprevádzaný zmenami systémového tlaku. Keď je do akumulátora naplnené najviac oleja, je systémový tlak najvyšší. Keď piest dosiahne bod nárazu, akumulátor vypustil najviac oleja – to je okamih najnižšieho systémového tlaku. Preto od štartu hydraulického kameňolomného zariadenia až po dosiahnutie ustáleného prevádzkového režimu sa jeho pracovný systémový tlak p vždy cyklicky mení medzi maximálnym tlakom p max a minimálnym tlakom p min , a je úplne nemožné, aby bol stály a nezmenený. Obr. 2-5 znázorňuje priebeh všetkých systémových parametrov počas prevádzky hydraulického kameňolomného zariadenia. 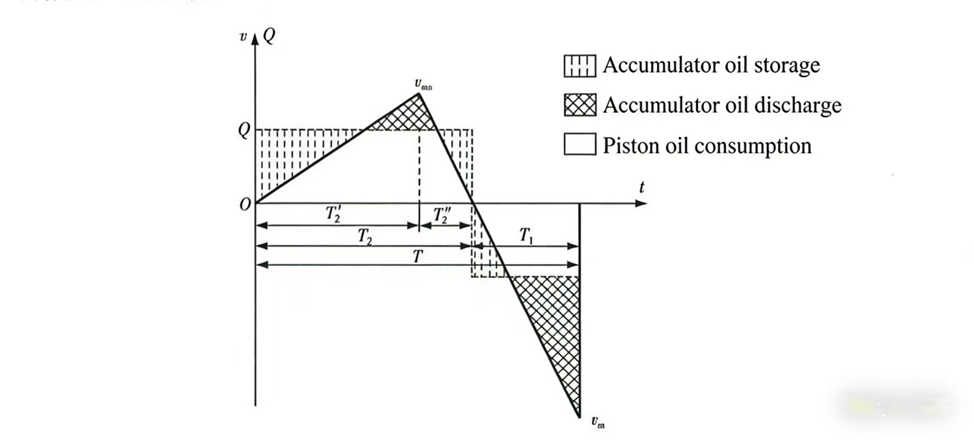
Obr. 2-5 Zmena systémových parametrov počas prevádzky hydraulického kameňolomného zariadenia [Legenda: šedé = nabitie akumulátora; krížové šedé = vybíjanie akumulátora; bielé = spotreba oleja piestom]
Pracovný proces popísaný vyššie ukazuje, že zmena pracovných parametrov je pomerne zložitá – ide o nelineárny systém. To spôsobuje významné ťažkosti pri hlbokom teoretickom analýze a výskume. V skutočnosti je to jedna z hlavných príčin, prečo sa teoretický výskum hydraulických kameňolomných zariadení za produktovým vývojom výrazne zaostáva.
Výskumníci po celom svete zvyčajne používajú dva rôzne technické prístupy k teoretickému výskumu hydraulických nárazových zariadení (hydraulických kameňolomných zariadení): výskum založený na teórii lineárnych systémov a výskum založený na teórii nelineárnych systémov.
1) Výskum založený na teórii lineárnych systémov predpokladá, že sila pôsobiaca na piest je konštantná, rýchlosť piesta sa zvyšuje lineárne konštantnou mierou a niektoré vplyvné faktory sa ignorujú; na tomto základe sa vytvorí lineárny matematický model pre teoretický výskum. Táto metóda výskumu je zjavne jednoduchá a dokáže vyriešiť niektoré praktické problémy, avšak nie je veľmi presná a obsahuje významné chyby.
2) Výskum založený na teórii nelineárnych systémov používa nelineárne diferenciálne rovnice vyšších rádov na popis pohybových vzorov hydraulického kameňolomného zariadenia a presnejšie zachytáva kinematiku a dynamiku piesta hydraulického kameňolomného zariadenia. Tento nelineárny výskum je presnejší než lineárny výskum, avšak stále sa opiera o niektoré predpoklady. Hoci dokáže presnejšie odhaliť niektoré fyzikálne javy hydraulického úderu, je ťažko riešiteľný, ťažko interpretovateľný a umožňuje získať len numerické riešenia prostredníctvom počítačových výpočtov, čo znevýhodňuje jeho praktické využitie.
Okrem týchto dvoch prístupov autori po mnohoročnom intenzívnym výskume navrhli Teóriu návrhu s abstraktnými premennými pre hydraulické kameňolamy (hydraulické nárazové mechanizmy). Pomocou teórie návrhu s abstraktnými premennými je možné nájsť analytické riešenia pre hydraulické kameňolamy, čo umožňuje hlboké odhalenie vnútorných zákonitostí pohybu hydraulických kameňolamov a poskytuje teoretický základ pre technickú inováciu používateľov.
Výskumný prístup abstraktnej premennej návrhovej teórie hydraulického kameňolomného zariadenia: uznáva sa nelinearita prevádzkových parametrov hydraulického kameňolomného zariadenia, avšak pomocou ekvivalentnej silevej transformácie sa nelineárny systém linearizuje, aby ho bolo možné študovať metódami lineárnych systémov a získať analytické riešenia. Prevádzkové a konštrukčné parametre hydraulických kameňolomných zariadení získané touto metódou sú veľmi presné a výpočet je jednoduchý. Abstraktná premenná návrhová teória hydraulického kameňolomného zariadenia bude podrobne popísaná v nasledujúcich kapitolách.

Vitajte v HOVOO, čínskej továrne na pečiatky. Výroba PU, guma a PTFE pečiatok. Pečiatky zahŕňajú O-ring, pečiatku pístu, pečiatku valca, Gray ring a plynovú pečiatku.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}