33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]
33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]

ของไหลคือสารใดๆ ก็ตามที่ไม่มีรูปร่างคงที่ ของไหลรวมถึงของเหลวและก๊าซทั้งสองชนิด
ของเหลว เช่นเดียวกับก๊าซ ประกอบด้วยโมเลกุล แต่ต่างจากก๊าซตรงที่โมเลกุลในของเหลวถูกดึงเข้าหากันอย่างแน่นหนา — อย่างไรก็ตาม ไม่แน่นจนถึงขั้นที่โมเลกุลถูกล็อกอยู่ในตำแหน่งคงที่เช่นเดียวกับในของแข็ง นี่คือเหตุผลที่ของเหลวสามารถไหลได้อย่างอิสระและรับรูปร่างของภาชนะที่บรรจุมัน
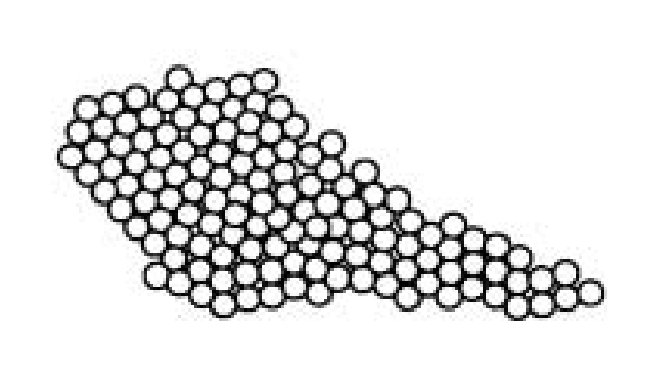
รูปที่ 2-1 โมเลกุลของของเหลว (ด้านล่าง) จัดเรียงแน่นหนาและเคลื่อนที่อยู่ตลอดเวลา ในขณะที่โมเลกุลของก๊าซ (ด้านบน) ห่างกันมาก
โมเลกุลภายในของเหลวกำลังเคลื่อนที่อยู่เสมอ — แม้เมื่อของเหลวนั้นดูเหมือนนิ่งสนิท โมเลกุลเหล่านั้นเลื่อนไถลและเคลื่อนผ่านกันไปมาอย่างต่อเนื่อง การเคลื่อนที่ของโมเลกุลในลักษณะนี้เรียกว่า พลังงานภายในของของเหลว
เนื่องจากมีการเลื่อนตัวของโมเลกุลอย่างต่อเนื่องนี้ ของไหลในสถานะของเหลวจึงสามารถไหลได้และเติมเต็มรูปร่างของภาชนะที่บรรจุมันไว้ไม่ว่าจะมีของเหลวมากหรือน้อยเพียงใด มันก็จะยังคงมีรูปร่างตามรูปร่างของภาชนะเสมอ ความสามารถนี้สัมพันธ์อย่างใกล้ชิดกับความหนืด ซึ่งจะกล่าวถึงในบทต่อๆ ไป
เนื่องจากโมเลกุลของของเหลวจัดเรียงตัวแน่นกันมาก ของเหลวจึงมีพฤติกรรมคล้ายกับของแข็งในแง่สำคัญประการหนึ่ง นั่นคือ มีคุณสมบัติไม่สามารถอัดให้ลดปริมาตรลงได้ง่าย — กล่าวคือ ไม่สามารถบีบให้มีปริมาตรลดลงอย่างมีนัยสำคัญได้
นี่คือเหตุผลที่นักดำน้ำเข้าสู่ผิวน้ำด้วยปลายเท้าหรือปลายนิ้วมือก่อน (ที่เรียกว่า "การเข้าแบบมีด") แทนที่จะกระโดดลงมาทั้งตัวด้วยบริเวณหน้าท้อง เพราะน้ำไม่สามารถเคลื่อนตัวออกได้เร็วพอเมื่อถูกกระทบด้วยพื้นผิวที่เรียบและกว้าง ทำให้แรงกระแทกนั้นรู้สึกเหมือนชนกับของแข็ง ส่วนปลายเท้าหรือปลายนิ้วมือจะแยกผิวน้ำออกด้วยพื้นที่ผิวที่เล็ก ซึ่งหมายความว่าแรงกระแทกที่เกิดขึ้นมีค่าน้อยกว่ามาก
เนื่องจากของเหลวมีคุณสมบัติไม่สามารถอัดให้ลดปริมาตรลงได้ง่าย และสามารถรับเอาโครงรูปรูปทรงของภาชนะใดๆ ได้ จึงทำให้ของเหลวมีข้อได้เปรียบอย่างแท้จริงในการส่งผ่านแรง

วิธีการส่งผ่านพลังงานทั้งสี่แบบ (กลไก ไฟฟ้า ไฮดรอลิก และนิวเมติก) สามารถส่งผ่านทั้งแรงคงที่ (พลังงานศักย์) และแรงเคลื่อน (พลังงานจลน์) ได้ทั้งหมด เมื่อแรงคงที่ถูกส่งผ่านของเหลว จะเกิดปรากฏการณ์พิเศษบางอย่างขึ้น
ต่างจากแรงที่กระทำต่อของแข็ง แรงที่กระทำต่อของเหลวที่ถูกกักไว้ในภาชนะจะถูกส่งผ่านไปทั่วทั้งของเหลวในรูปของความดัน — และความดันนั้นมีค่าเท่ากันทุกจุดภายในของเหลวนั้น
หากเราออกแรงกดลงบนลูกสูบแบบเลื่อนได้ซึ่งวางอยู่บนภาชนะที่บรรจุของเหลวเต็ม แรงที่เราออกจะสร้างความดันขึ้น และความดันนั้นจะส่งผ่านไปอย่างสม่ำเสมอในทุกทิศทางภายในของเหลว
ไม่ว่าความดันนั้นจะถูกสร้างขึ้นด้วยวิธีใดก็ตาม — ไม่ว่าจะโดยลูกสูบ มือ แรงโน้มถ่วง สปริง หรืออากาศที่ถูกอัด หรือแม้แต่การรวมกันของวิธีต่าง ๆ เหล่านี้ — เมื่อแรงเข้าสู่ของเหลวที่ถูกกักไว้แล้ว มันจะเปลี่ยนเป็นความดันและส่งผ่านออกไปอย่างสม่ำเสมอทั่วทั้งของเหลว
เนื่องจากของเหลวรับรูปร่างของภาชนะที่บรรจุ ความดันจึงสามารถส่งผ่านได้โดยไม่ขึ้นกับรูปร่างของภาชนะ
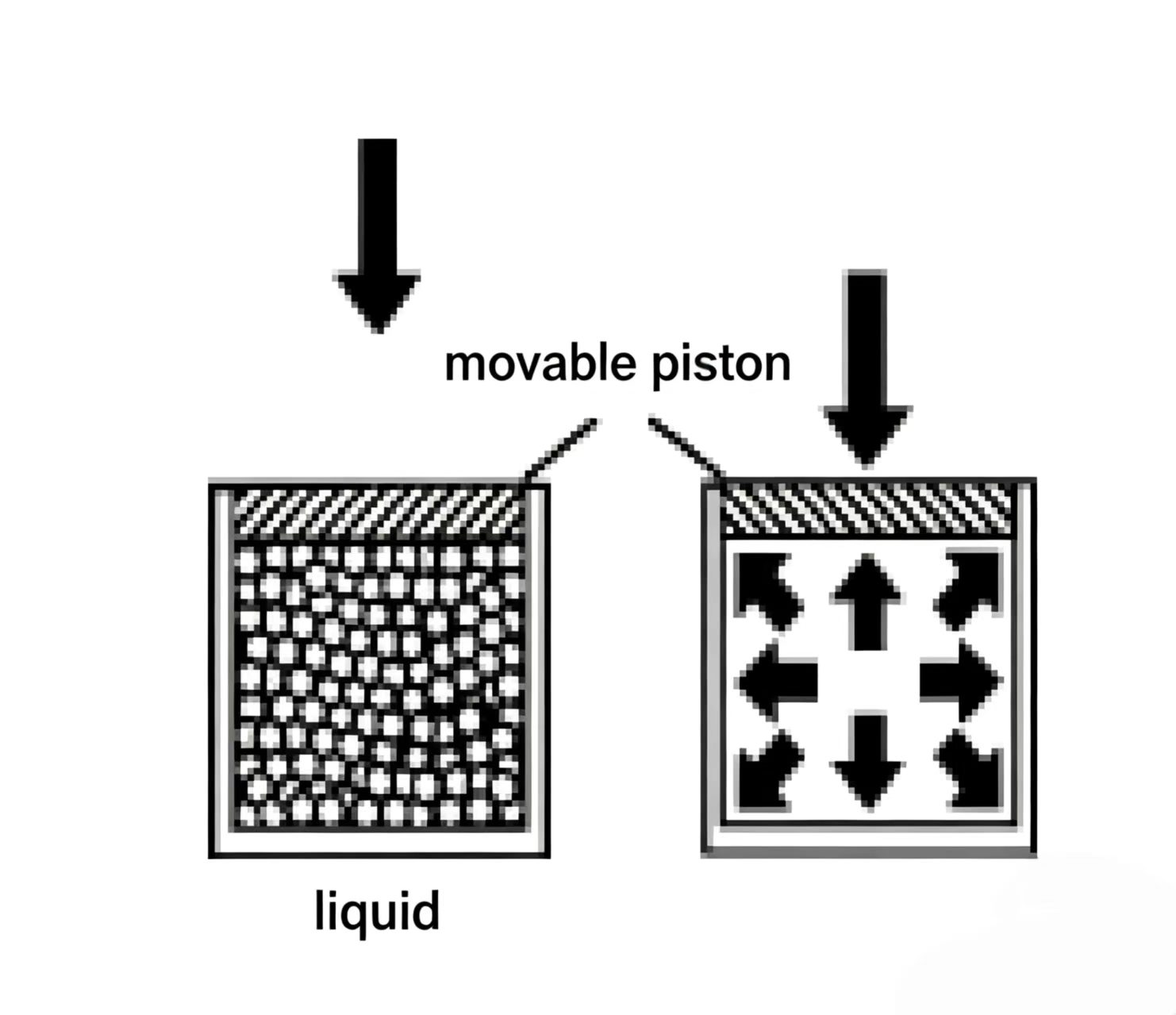
รูปที่ 2-4 แรงที่กระทำต่อลูกสูบจะเปลี่ยนเป็นความดันในของเหลว ความดันนี้จะกระจายอย่างสม่ำเสมอไปในทุกทิศทาง — นี่คือหลักการสำคัญของระบบไฮดรอลิก
คุณสมบัติของของเหลวที่สามารถถ่ายทอดความดันอย่างสม่ำเสมอไปในทุกทิศทางเรียกว่า กฎของปาสคาล (Pascal's Law) ซึ่งตั้งชื่อตามผู้ค้นพบคือ แบลซ ปาสคาล (Blaise Pascal)
รูปแบบทางคณิตศาสตร์ของกฎของปาสคาลเหมือนกับสูตรความดันที่ได้แนะนำไว้ในบทที่ 1:
ความดัน (psi) = แรง (ปอนด์) ÷ พื้นที่ (ตารางนิ้ว)
ความดัน (บาร์) = แรง (นิวตัน) ÷ [พื้นที่ (ตารางเมตร) × 100,000]
กฎของปาสคาล: ความดันที่กระทำต่อของเหลวที่ถูกกักไว้จะถูกส่งผ่านไปอย่างไม่ลดลงในทุกทิศทางภายในของเหลวนั้น และออกแรงเท่ากันต่อพื้นที่ที่มีขนาดเท่ากันทุกแห่ง
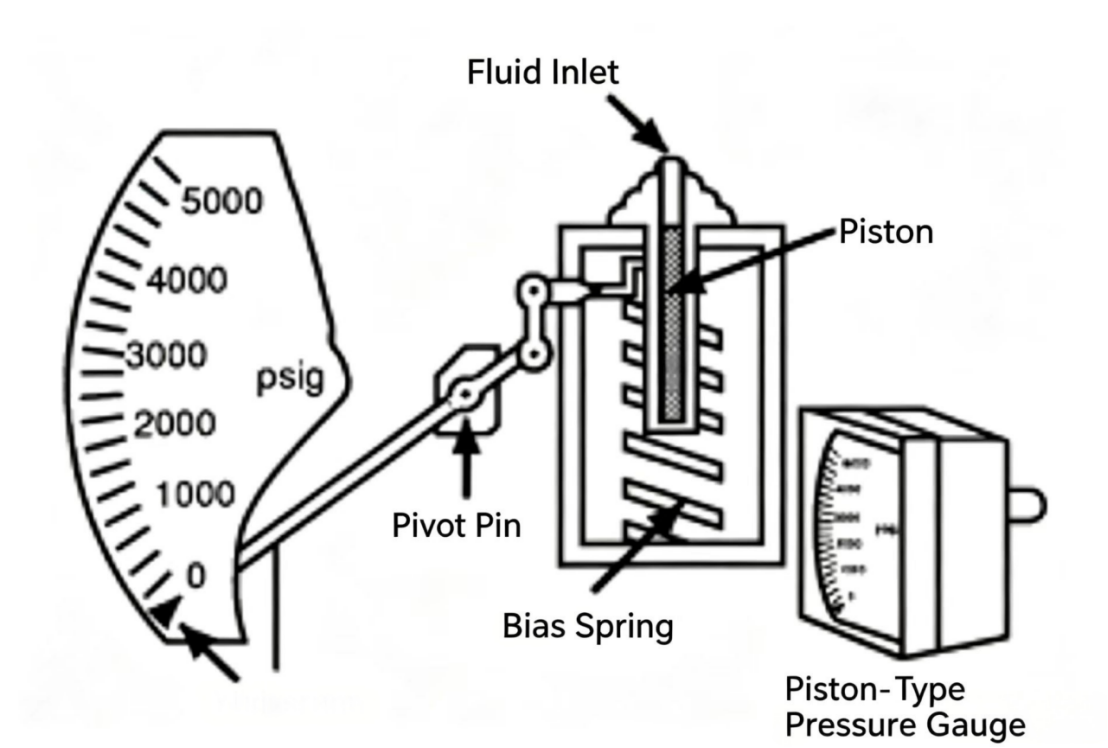
มาตรวัดความดันใช้วัดความดันที่กระทำต่อของเหลวในระบบ สองชนิดที่พบได้บ่อยที่สุดในระบบไฮดรอลิกคือ มาตรวัดแบบท่อบูร์ดอง (Bourdon tube gauge) และมาตรวัดแบบลูกสูบ (piston-type gauge)
มาตรวัดแบบท่อเบอร์ดอนประกอบด้วยหน้าปัดและเข็มชี้ โดยเข็มชี้เชื่อมต่อกับท่อโลหะโค้งยืดหยุ่นที่เรียกว่าท่อเบอร์ดอน ความดันของระบบจะไหลเข้าสู่ท่อผ่านทางช่องรับเข้า สเกลโดยทั่วไปจะถูกทำเครื่องหมายเป็นหน่วย psi, bar หรือ Pa

เมื่อความดันของระบบเพิ่มขึ้น ความต่างของพื้นที่ระหว่างด้านในกับด้านนอกของท่อโค้งจะทำให้ท่อมีแนวโน้มเหยียดตรงขึ้น การเคลื่อนที่แบบเหยียดตรงนี้จะขับเคลื่อนเข็มชี้ให้เคลื่อนที่ไปตามหน้าปัดเพื่อบ่งชี้ค่าความดัน มาตรวัดแบบท่อเบอร์ดอนเป็นเครื่องมือที่มีความแม่นยำสูง โดยมีค่าความคลาดเคลื่อนอยู่ที่ 0.1% ถึง 3.0% ของช่วงการวัดเต็ม (full scale) ซึ่งใช้งานได้ทั้งในการทดสอบในห้องปฏิบัติการ หรือในสถานการณ์ใดๆ ที่ต้องการความแม่นยำสูงในการวัดความดัน
มาตรวัดแบบลูกสูบประกอบด้วยลูกสูบ สปริงสมดุล เข็มชี้ และมาตราส่วน ความดันของระบบจะกระทำต่อด้านหน้าของลูกสูบ ผลักลูกสูบให้กดลงบนสปริง การเคลื่อนที่ของลูกสูบจะขับเคลื่อนเข็มชี้ไปตามหน้าปัด มาตราส่วนถูกสอบเทียบเป็นหน่วย psi (บาร์) มาตรวัดแบบลูกสูบมีความทนทานและประหยัดค่าใช้จ่าย — จึงเป็นตัวเลือกทั่วไปสำหรับการตรวจสอบระบบในชีวิตประจำวัน

รูปที่ 2-6 มาตรวัดแบบลูกสูบ: ความดันของระบบผลักลูกสูบให้กดลงบนสปริง การเคลื่อนที่ของลูกสูบจะขับเคลื่อนเข็มชี้
การส่งผ่านความดันโดยใช้ของเหลวที่บรรจุอยู่ในระบบปิดจะมีประโยชน์ก็ต่อเมื่อสามารถแปลงความดันนั้นกลับเป็นแรงกลได้ที่จุดใดจุดหนึ่ง ซึ่งเป็นหน้าที่ของแอคทูเอเตอร์ (องค์ประกอบขับเคลื่อน) — ซึ่งทำหน้าที่รับความดันไฮดรอลิกและแปลงเป็นแรงกล
กระบอกสูบไฮดรอลิกเป็นหนึ่งในประเภทของแอคทูเอเตอร์
กระบอกสูบไฮดรอลิกทำหน้าที่รับความดันไฮดรอลิกและแปลงเป็นแรงกลเชิงเส้น (แรงตรง) ผ่านการต่อกลไกทางกลที่เหมาะสม แรงนี้ยังสามารถแปลงให้เป็นการเคลื่อนที่แบบหมุนได้อีกด้วย
ส่วนประกอบพื้นฐานของกระบอกสูบ ได้แก่ ตัวถัง (ท่อ), ฝาปิดปลายทั้งสองด้าน, ลูกสูบ, แท่งลูกสูบ และช่องรับ-จ่ายน้ำมัน แต่ละปลายมีฝาปิดปลายหนึ่งชิ้น ลูกสูบสามารถเลื่อนไสลด์อยู่ภายในตัวถังได้ แท่งลูกสูบเชื่อมต่อกับลูกสูบ ช่องรับและช่องจ่ายน้ำมันที่แต่ละปลายของตัวถังจะทำให้น้ำมันทำงานไหลเข้าและออกได้
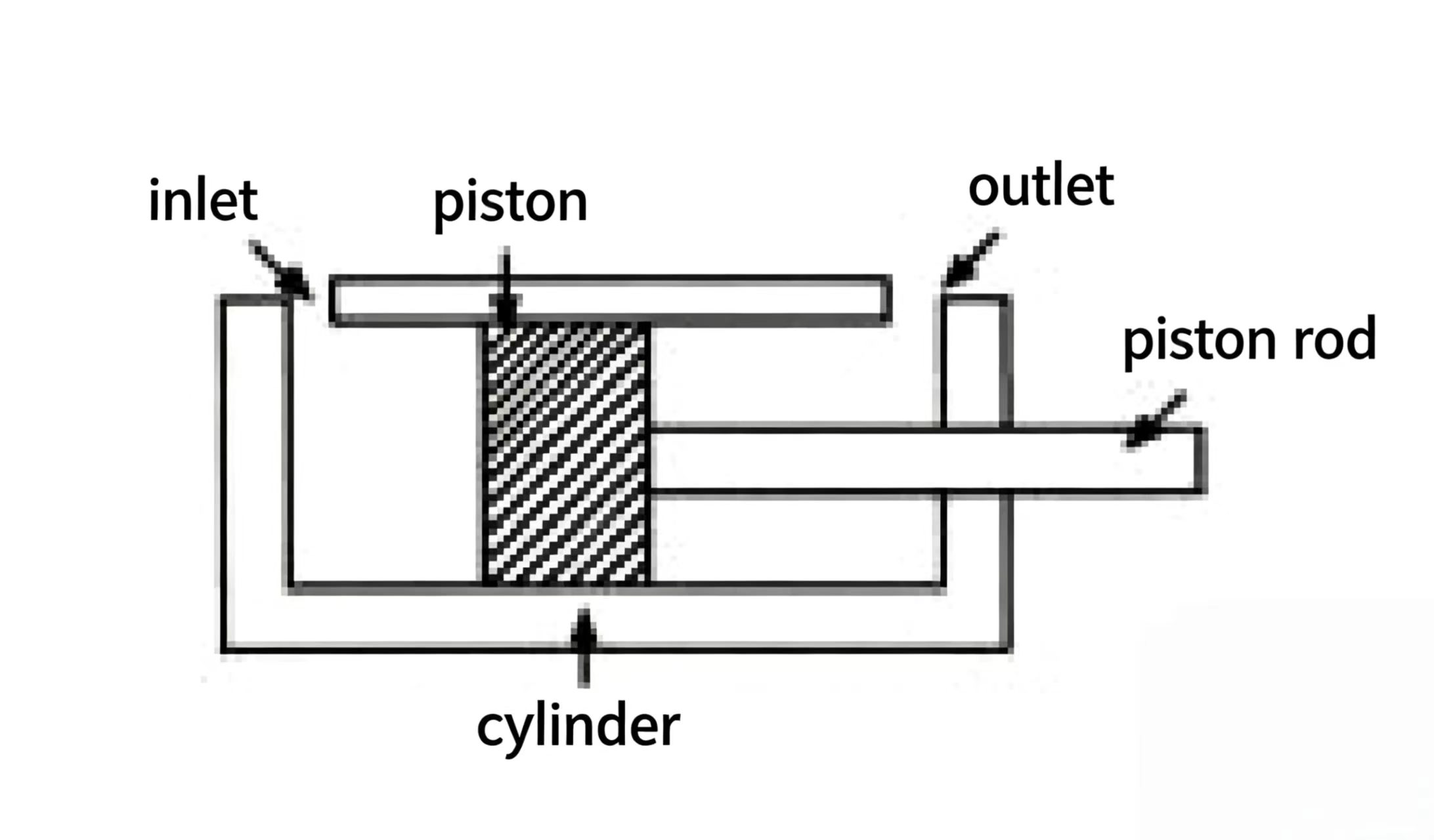
รูปที่ 2-8 ภาพตัดขวางของกระบอกสูบไฮดรอลิก น้ำมันไหลเข้าทางช่องหนึ่ง ดันลูกสูบให้เคลื่อนที่ และแท่งลูกสูบยื่นออกมา น้ำมันที่ไหลออกจากอีกช่องหนึ่งจะกลับคืนสู่ถังเก็บ
เมื่อช่องรับของกระบอกสูบเชื่อมต่อกับระบบ กระบอกสูบจะกลายเป็นส่วนหนึ่งของระบบนั้น ความดันจากจุด A จะส่งผ่านระบบไปยังลูกสูบภายในกระบอกสูบ ความดันนี้ที่กระทำต่อพื้นที่ผิวของลูกสูบจะสร้างแรงกลที่จุด B — ซึ่งอยู่ที่ปลายแท่งลูกสูบ
เมื่อความดันส่งผ่านของเหลวที่บรรจุอยู่ในภาชนะปิดสนิท ส่วนที่เคลื่อนที่บางส่วนจะเป็นตัวสร้างความดันนั้น ในการตัวอย่างทั้งหมดที่กล่าวมาจนถึงขณะนี้ ส่วนที่เคลื่อนที่คือลูกสูบ การหารแรงด้วยพื้นที่ผิวของลูกสูบจะได้ค่าความดันในระบบ (P = F/A)
ไฮดรอลิกสามารถเพิ่ม (คูณ) แรงเชิงกลได้ ปัจจัยการคูณขึ้นอยู่กับพื้นที่หน้าตัดของลูกสูบกระบอกสูบไฮดรอลิก (หน่วยเป็นตารางนิ้ว หรือ ตารางเซนติเมตร) เนื่องจากความดันถูกส่งผ่านของเหลวที่บรรจุอยู่ในระบบปิดอย่างสม่ำเสมอ ดังนั้นหากพื้นที่หน้าตัดของลูกสูบกระบอกสูบขาออกมีขนาดใหญ่กว่าลูกสูบกระบอกสูบขาเข้า แรงที่เกิดขึ้นที่ขาออกจะมากกว่าแรงที่ป้อนเข้า
ตัวอย่าง: แรง 5,000 ปอนด์ (22,200 นิวตัน) กระทำต่อลูกสูบซึ่งมีพื้นที่หน้าตัด 10 ตารางนิ้ว (64.52 ตารางเซนติเมตร) ทำให้เกิดความดันเท่ากับ:
P = F / A = 5,000 ปอนด์ / 10 ตารางนิ้ว² = 500 psi (34.5 บาร์)
ความดัน 500 psi เดียวกันนี้กระทำต่อลูกสูบขาออกที่มีพื้นที่หน้าตัด 15 ตารางนิ้ว (96.78 ตารางเซนติเมตร):
F_out = P × A_out = 500 psi × 15 ตารางนิ้ว² = 7,500 ปอนด์ (33,360 นิวตัน)
สูตรการคูณแรง: F_out = P × A_out โดยที่ P = F_in / A_in
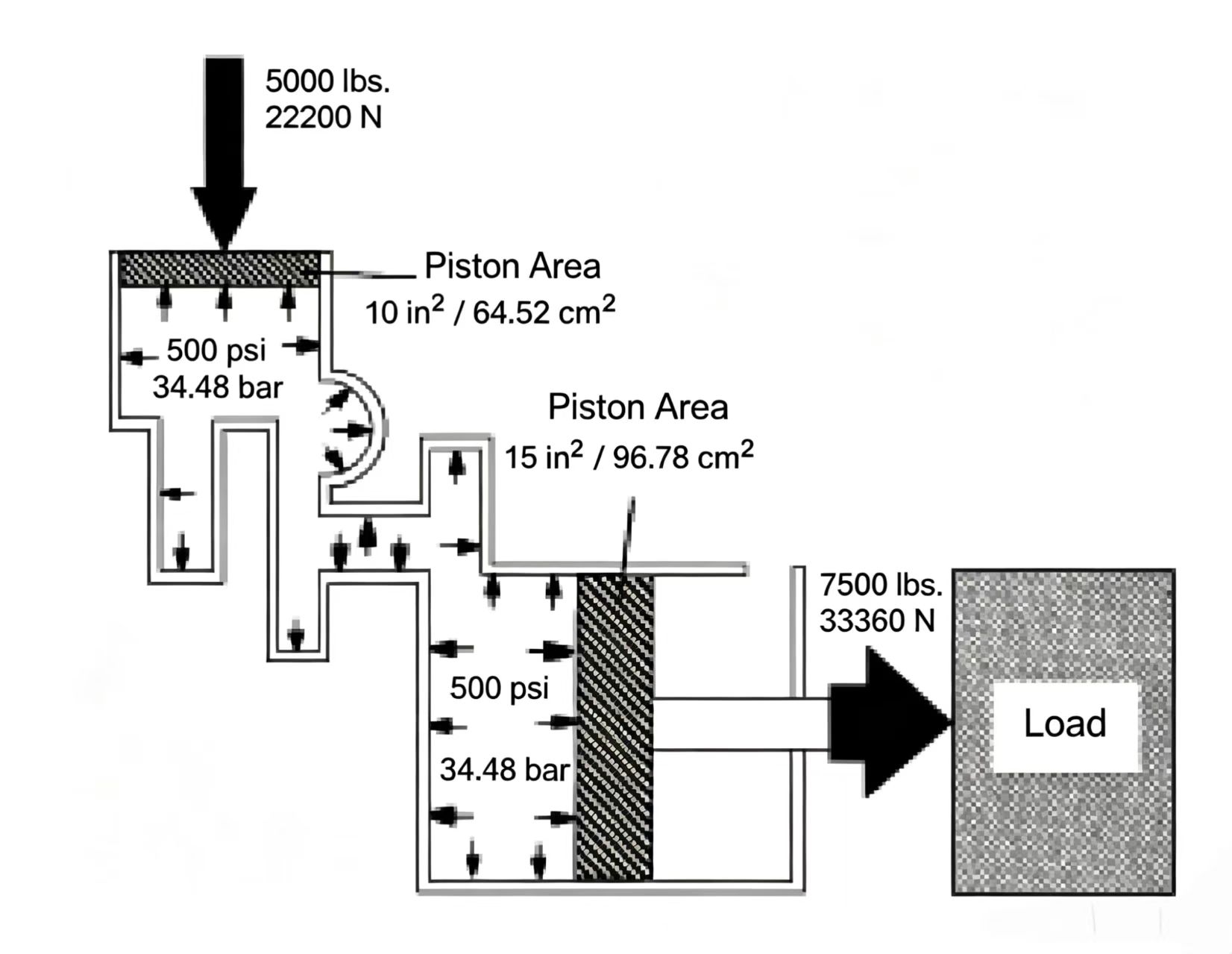
รูปที่ 2-9 การคูณแรงเชิงกล ความดันเดียวกันกระทำต่อลูกสูบทั้งสองตัว แต่ลูกสูบที่มีขนาดใหญ่กว่าจะสร้างแรงได้มากกว่า F = P × A
ตัวเพิ่มแรงดัน (เรียกอีกอย่างว่าตัวบูสต์) สามารถเพิ่มแรงดันไฮดรอลิกได้ โดยใช้ลูกสูบสองตัวที่เชื่อมต่อกันด้วยก้านลูกสูบเดียวภายในปลอกหุ้มเดียวกัน ซึ่งมีช่องรับเข้า ช่องจ่ายออก และช่องระบายน้ำ ลูกสูบขนาดใหญ่ทำหน้าที่ตรวจจับแรงดันของระบบ แรงที่เกิดขึ้นจะถูกส่งผ่านไปยังลูกสูบขนาดเล็ก ซึ่งให้แรงดันขาออกสูงกว่า เนื่องจากพื้นที่หน้าตัดของลูกสูบขนาดเล็กมีค่าน้อยกว่า
ลูกสูบขนาดใหญ่ตรวจจับแรงดันของระบบและส่งแรงนั้นผ่านก้านลูกสูบไปยังลูกสูบขนาดเล็ก เนื่องจากลูกสูบขนาดเล็กมีพื้นที่หน้าตัดน้อยกว่า แรงดันขาออกที่ปลายลูกสูบขนาดเล็กจึงสูงขึ้น — กล่าวคือ แรงดันถูกเพิ่มขึ้น
ตัวอย่าง: แรง 5,000 ปอนด์ (22,200 นิวตัน) กระทำต่อลูกสูบขนาดใหญ่ (พื้นที่หน้าตัด: 15 ตารางนิ้ว / 96.78 ตารางเซนติเมตร) แรงดัน = 333 psi (22.9 บาร์) แรงนี้ถูกส่งผ่านไปยังลูกสูบขนาดเล็ก (พื้นที่หน้าตัด: 0.76 ตารางเซนติเมตร) แรงดันขาออก = 5,000 ปอนด์ ÷ 0.76 ตารางเซนติเมตร × (1⁄10,000) = 2,000 psi (137.9 บาร์) แรงขาออก = 30,000 ปอนด์ (133,200 นิวตัน)
การใช้งานทั่วไปของตัวเพิ่มแรงดันคือในอุปกรณ์ยึดชิ้นงาน
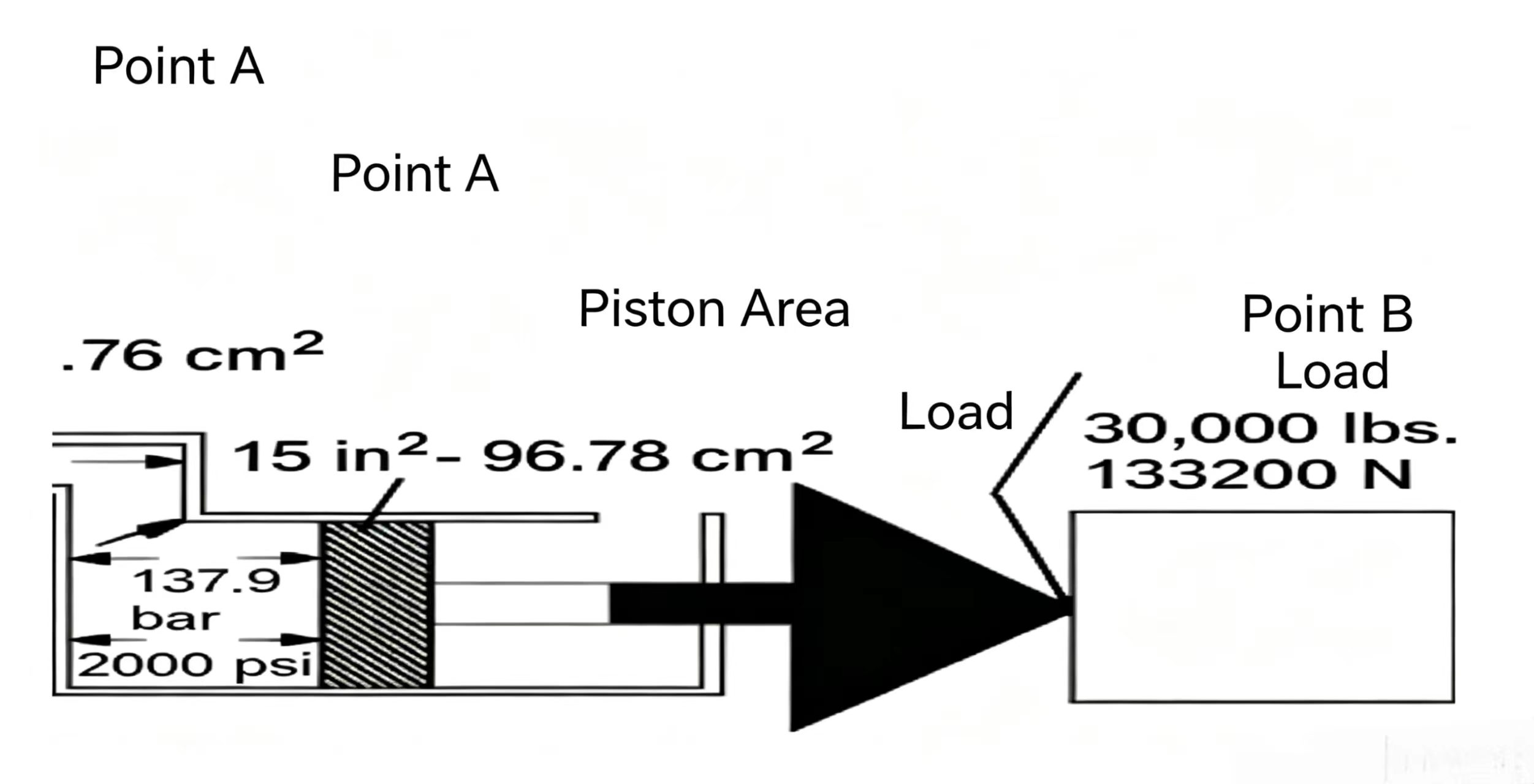
รูปที่ 2-11 เครื่องเพิ่มแรงดัน (Pressure intensifier) ลูกสูบขนาดใหญ่ถ่ายโอนแรงไปยังลูกสูบขนาดเล็ก ซึ่งมีพื้นที่หน้าตัดน้อยกว่ามาก — ส่งผลให้เกิดแรงดันสูงขึ้นอย่างมากที่ทางออก
วัตถุประสงค์ของการใช้ระบบไฮดรอลิก (หรือวิธีการส่งผ่านพลังงานอื่นใด) ในเครื่องจักร คือ การทำงานที่เป็นประโยชน์ สำหรับกระบอกสูบในการทำงาน มันจะต้องออกแรงต่อภาระและเคลื่อนย้ายภาระนั้นผ่านระยะทางหนึ่ง — ดังนั้น ระบบจึงจำเป็นต้องมีองค์ประกอบที่สามารถใช้พลังงานเพื่อจ่ายของไหลอย่างต่อเนื่อง
ทุกสิ่งที่เราได้พิจารณามาจนถึงขณะนี้ ซึ่งสร้างแรงดันในของไหลที่บรรจุอยู่ในภาชนะปิด จะใช้ลูกสูบและกระบอกสูบเป็นหลัก ลูกสูบทำหน้าที่ออกแรง ส่วนกระบอกสูบทำหน้าที่ปิดผนึกของไหล องค์ประกอบประเภทนี้เรียกว่า อุปกรณ์เก็บพลังงาน (accumulator)
อุปกรณ์เก็บพลังงาน (accumulator) สามารถเก็บพลังงานศักย์ของของไหลภายใต้แรงดันไว้ได้ พลังงานศักย์ที่เก็บไว้นี้สามารถแปลงเป็นพลังงานใช้งานได้ (คือ การไหลและแรงดัน)
ตัวอย่าง: แอคคิวมูเลเตอร์ที่ให้ความดัน 500 psi (34.5 บาร์) จะจ่ายความดันเพื่อดันโหลด ซึ่งจากความดันที่เก็บไว้ทั้งหมด 500 psi นั้น จะใช้ 400 psi (27.6 บาร์) เพื่อเอาชนะแรงต้านของโหลด ส่วนความดันที่เหลือจะเปลี่ยนเป็นอัตราการไหลเพื่อเคลื่อนย้ายโหลด
แอคคิวมูเลเตอร์มีข้อจำกัดอยู่ประการหนึ่ง คือ หากโหลดมีขนาดใหญ่มาก อาจไม่มีความดันเพียงพอที่จะเอาชนะแรงต้านได้ จึงไม่สามารถทำงานใดๆ ได้ นอกจากนี้ เมื่อของเหลวที่เก็บไว้ถูกปล่อยออกมาจนหมดแล้ว ก็จะไม่มีอัตราการไหลเพิ่มเติมอีก
เพื่อสร้างความดันที่เพียงพอในการเอาชนะโหลดและจ่ายอัตราการไหลอย่างต่อเนื่อง จำเป็นต้องใช้อุปกรณ์ชนิดอื่น นั่นคือ ปั๊มไฮดรอลิกแบบปริมาตรคงที่

รูปที่ 2-12 การทำงานของแอคคิวมูเลเตอร์ ความดันที่เก็บไว้สามารถดันโหลดได้ แต่เมื่อของเหลวหมดลง อัตราการไหลก็จะหยุดทันที — แอคคิวมูเลเตอร์ไม่สามารถรองรับการทำงานอย่างต่อเนื่องได้ด้วยตนเอง
ปั๊มแบบปริมาตรคงที่ (positive-displacement pump) สร้างการไหลของของเหลวอย่างต่อเนื่องโดยอาศัยการเคลื่อนที่ภายในแบบลูกสูบกลับไปกลับมาหรือแบบหมุนซ้ำๆ กัน ซึ่งให้ทั้งพลังงานจลน์ (การไหล) และพลังงานความดัน — คือ พลังงานในการทำงานที่จำเป็นสำหรับการทำงานไฮดรอลิกอย่างต่อเนื่อง
ปั๊มลูกสูบแบบกลับไปกลับมา (reciprocating piston pump) มีลูกสูบที่เชื่อมต่อกับแหล่งขับเคลื่อนหลัก (เครื่องยนต์หรือมอเตอร์ไฟฟ้า) ผ่านข้อเหวี่ยงหรือล้อเลื่อนแบบแคม ทั้งทางเข้าและทางออกแต่ละช่องมีวาล์วควบคุมแบบลูกบอล (ball-type check valve) เมื่อดึงลูกสูบออก ปริมาตรภายในจะขยายตัว ทำให้ลูกบอลที่ทางเข้าเปิดขึ้นและของเหลวไหลเข้ามา เมื่อผลักลูกสูบเข้าไป ปริมาตรภายในจะลดลง ความดันจะเพิ่มขึ้น ลูกบอลที่ทางเข้าจะปิดลง และลูกบอลที่ทางออกจะเปิดขึ้น — ส่งผลให้ของเหลวถูกดันเข้าสู่ระบบ การเคลื่อนที่กลับไปกลับมาอย่างต่อเนื่องนี้จะก่อให้เกิดการไหลแบบเป็นจังหวะ (pulsating flow) โดยความดันสามารถปรับให้สอดคล้องกับความต้องการของระบบได้
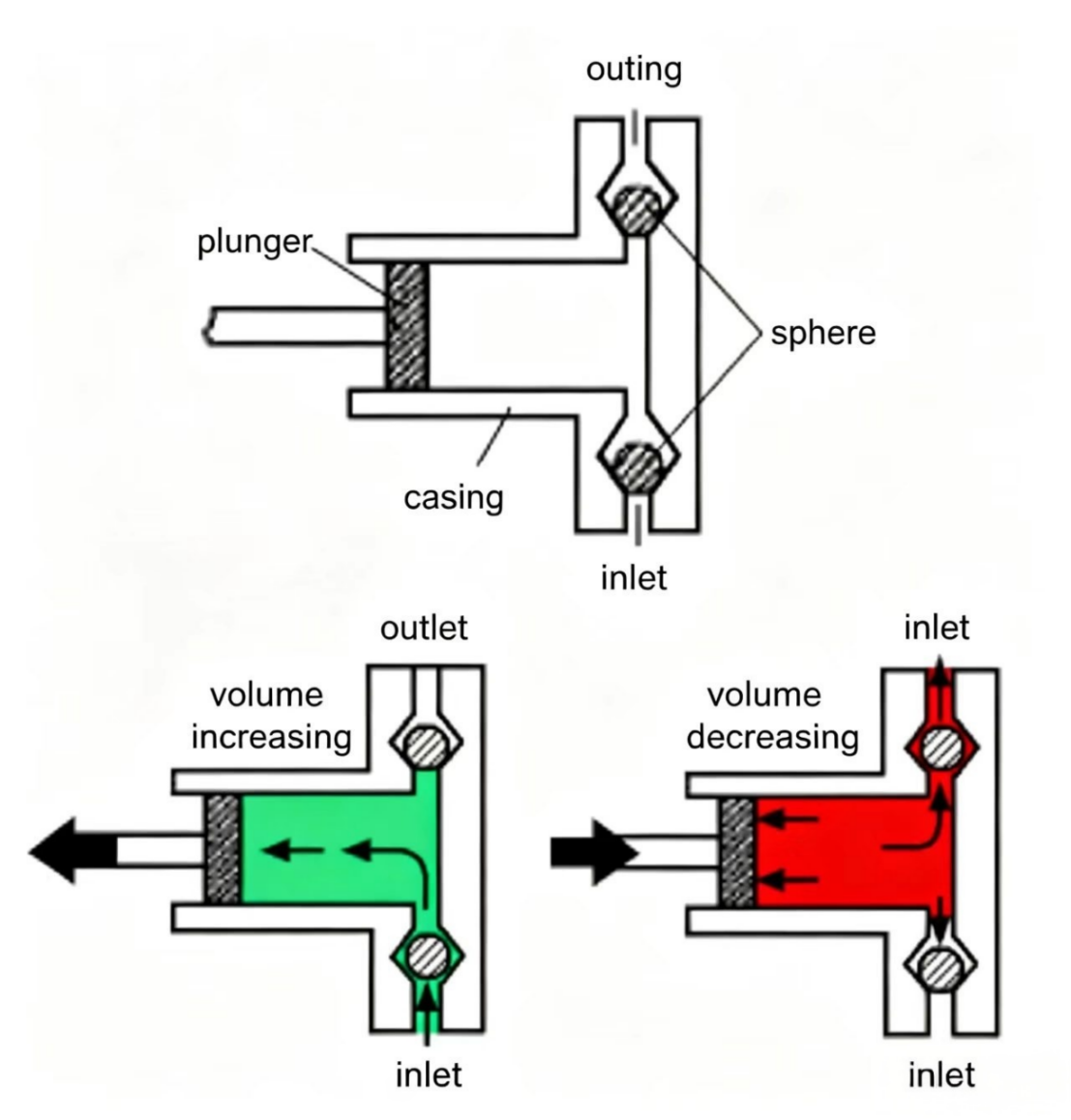
รูปที่ 2-13 ปั๊มลูกสูบแบบกลับไปกลับมา ลูกสูบเคลื่อนที่เข้าและออก ส่งผลให้น้ำมันไหลเข้าผ่านวาล์วควบคุมทางเข้า และถูกดันออกผ่านวาล์วควบคุมทางออก
ปั๊มที่ใช้กันอย่างแพร่หลายที่สุดในระบบไฮดรอลิกอุตสาหกรรมคือปั๊มแบบหมุนแบบปริมาตรคงที่ (rotary positive-displacement pump) ซึ่งสามารถสร้างกระแสของเหลวที่มีความเรียบและแรงดันค่อนข้างสม่ำเสมอ และขับเคลื่อนได้ง่ายด้วยมอเตอร์ไฟฟ้าหรือเครื่องยนต์ ทุกการหมุนหนึ่งรอบขององค์ประกอบที่หมุนจะขจัดของเหลวออกเป็นปริมาตรคงที่
ปั๊มแบบหมุนมีโครงสร้างประกอบด้วยตัวเรือนและชุดหมุน ตัวเรือนมีทางเข้าและทางออก ส่วนชุดหมุนทำหน้าที่สร้างกระแสไหลและแรงดัน ตัวอย่างที่แสดงไว้มีโรเตอร์และใบพัดที่สามารถเลื่อนเข้า-ออกได้อย่างอิสระตามร่องบนโรเตอร์

ชุดหมุนติดตั้งแบบเยื้องศูนย์ (ไม่อยู่กึ่งกลาง) ภายในปลอกหุ้ม และเชื่อมต่อกับแหล่งขับเคลื่อนด้วยเพลาขับ — โรเตอร์จะหมุน ขณะที่โรเตอร์หมุน แรงเหวี่ยงจะดันใบพัดให้เลื่อนออกสู่ผนังของปลอกหุ้ม ทำให้เกิดช่องว่างที่ปิดสนิท ด้านทางเข้า ปริมาตรของช่องว่างจะเพิ่มขึ้น จึงดูดของเหลวเข้ามา ด้านทางออก ปริมาตรของช่องว่างจะลดลง ความดันจึงเพิ่มขึ้น และของเหลวจะถูกผลักออกจากระบบ ปั๊มชนิดนี้สร้างความดันได้เท่ากับความต้านทานต่ำสุดในระบบเท่านั้น — ไม่มากกว่านั้น
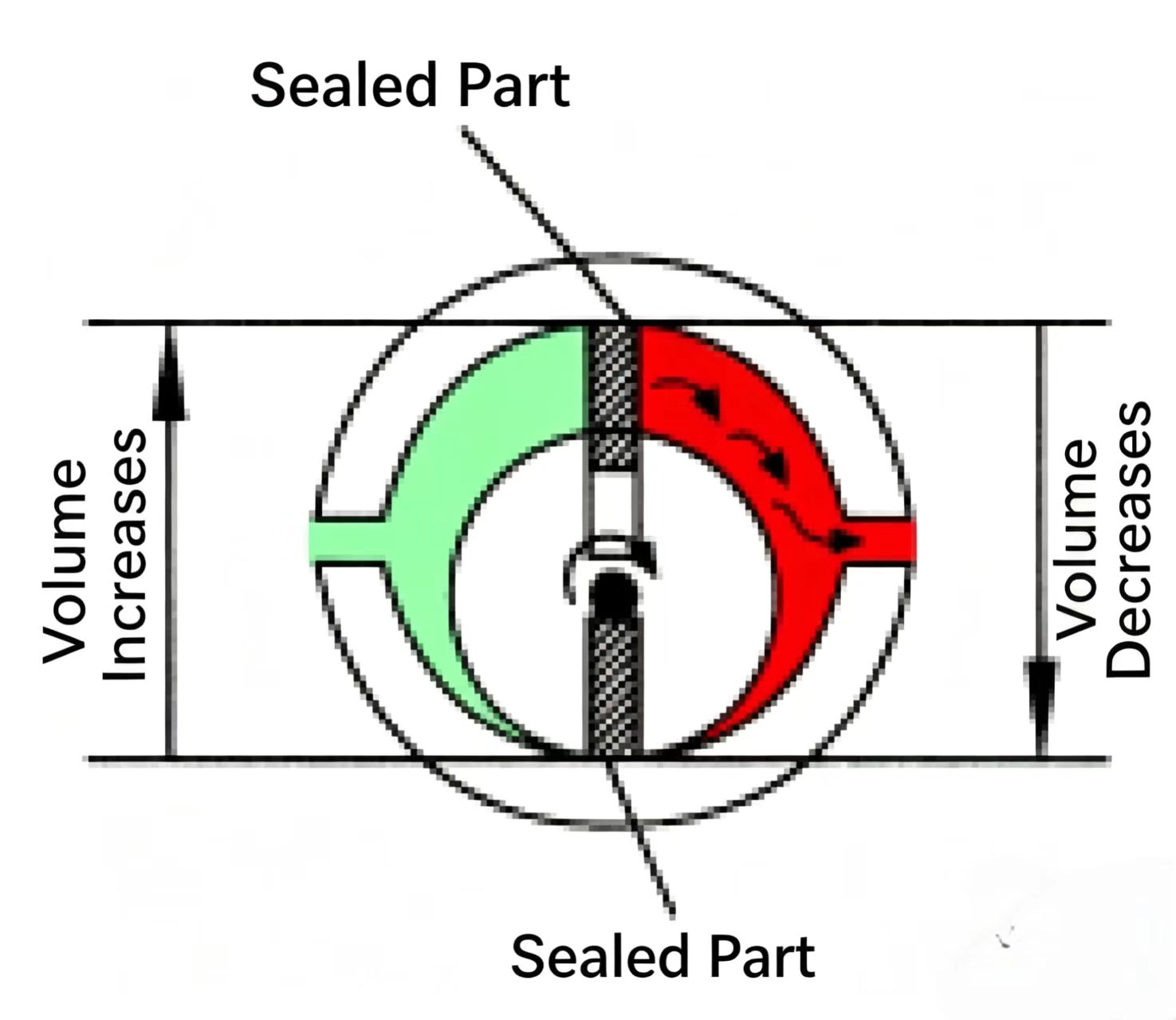
รูปที่ 2-15 ปั๊มใบพัดหมุน ใบพัดที่แนบสนิทกับผนังของปลอกหุ้มจะสร้างช่องว่างที่ขยายตัว (ด้านทางเข้า) และหดตัว (ด้านทางออก) ขณะที่โรเตอร์หมุน
ในระบบไฮดรอลิก ความดันและแรงต้านมีความสัมพันธ์โดยตรงกัน ปั๊มจะดันของเหลวเข้าสู่ระบบ ระดับความดันจะถูกกำหนดโดยระดับของแรงต้าน แรงต้านสูง → ความดันสูง; แรงต้านต่ำ → ความดันต่ำ แรงต้านต่อการไหลของของเหลวเป็นตัวกำหนดว่าจะเกิดความดันมากน้อยเพียงใด
ปั๊มต้องเผชิญกับแรงต้านสองประเภท ได้แก่ แรงต้านจากภาระ (load resistance) และแรงต้านจากการไหล (flow resistance) หากเราละเลยแรงต้านจากการไหล แรงต้านที่เหลืออยู่เพียงอย่างเดียวคือแรงต้านจากภาระ ตัวอย่างเช่น หากต้องการความดัน 200 psi (13.8 บาร์) เพื่อเอาชนะแรงต้านจากภาระ ปั๊มจะสร้างความดัน 200 psi และส่งพลังงานไฮดรอลิกไปยังแอคทูเอเตอร์ ซึ่งจะขับเคลื่อนภาระให้เคลื่อนที่
แรงต้านจากการไหลมีอยู่เสมอ ซึ่งบังคับให้ปั๊มดึงพลังงานเพิ่มเติมจากเครื่องขับเคลื่อนหลัก (prime mover) และสร้างความดันที่สูงขึ้นเพื่อเอาชนะแรงต้านนั้น

รูปที่ 2-16 แสดงความสัมพันธ์ระหว่างแรงต้านและความดัน ความดันของปั๊มจะเพิ่มขึ้นเพื่อเอาชนะแรงต้านรวมทั้งหมดที่มันต้องเผชิญ ซึ่งประกอบด้วยแรงต้านจากภาระบวกกับแรงต้านจากการไหล (แรงเสียดทาน)
พลังงานส่วนเกินที่ปั๊มส่งเข้าไปยังของเหลวเพื่อเอาชนะแรงต้านการไหลนั้นไม่ได้ถูกแปลงเป็นพลังงานไฮดรอลิกเชิงกลที่มีประโยชน์ที่ตัวขับเคลื่อน (actuator) — แต่ถูกใช้ไปโดยแรงเสียดทานจากการไหล พลังงานที่ถูก "ใช้ไป" นี้ไม่สูญหายในความหมายตามหลักการอนุรักษ์พลังงาน แต่ถูกแปลงเป็นความร้อน ซึ่งทำให้อุณหภูมิของของเหลวสูงขึ้น ความร้อนนี้คือสาเหตุของประสิทธิภาพต่ำของระบบ
ในระบบไฮดรอลิกแบบไดนามิก (ที่ของเหลวไหลอยู่) ของเหลวจะเคลื่อนที่ผ่านท่อด้วยความเร็วหนึ่งๆ ซึ่งวัดเป็นฟุตต่อวินาที (ft/s) หรือเมตรต่อวินาที (m/s)
ปริมาตรของของเหลวที่ผ่านจุดหนึ่งๆ ต่อหนึ่งหน่วยเวลา เรียกว่า อัตราการไหล ในระบบไฮดรอลิกหน่วยวัดมักใช้เป็นแกลลอนต่อนาที (gpm) แบบสหรัฐฯ หรือลิตรต่อนาที (Lpm)
ความเร็วและอัตราการไหลมีความสัมพันธ์กัน: เพื่อเติมภาชนะขนาด 5 แกลลอน (18.95 ลิตร) ให้เต็มภายในหนึ่งนาทีผ่านท่อขนาดใหญ่ ของเหลวจะต้องเคลื่อนที่ด้วยความเร็ว 10 ฟุตต่อวินาที (3.04 เมตรต่อวินาที) แต่หากใช้ท่อที่มีขนาดเล็กเพียงครึ่งหนึ่ง ของเหลวจะต้องเคลื่อนที่ด้วยความเร็ว 20 ฟุตต่อวินาที (6.10 เมตรต่อวินาที) เพื่อให้ส่งของเหลวได้เท่ากับ 5 gpm เหมือนเดิม อัตราการไหลจึงเท่ากัน แต่ความเร็วต่างกัน
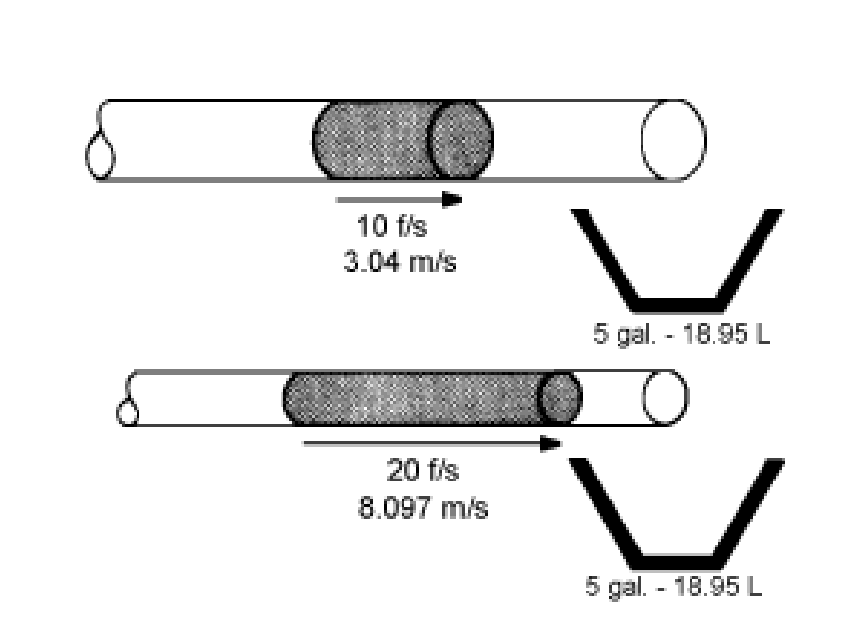
รูปที่ 2-17 อัตราการไหลเท่ากัน แต่ความเร็วต่างกัน ในท่อที่มีขนาดเล็กกว่า ของไหลจะต้องเคลื่อนที่ด้วยความเร็วสูงขึ้นเพื่อให้ผ่านปริมาตรเท่ากันต่อนาที
ของเหลวที่ไหลผ่านท่อไฮดรอลิกก่อให้เกิดความร้อนเนื่องจากแรงเสียดทาน — ยิ่งไหลเร็วเท่าไร ก็ยิ่งผลิตความร้อนได้มากขึ้นเท่านั้น ในงานอุตสาหกรรม ความเร็วของของไหลที่แนะนำภายในท่อระหว่างปั๊มกับแอคทูเอเตอร์คือ 15 ฟุต/วินาที (4.572 เมตร/วินาที)
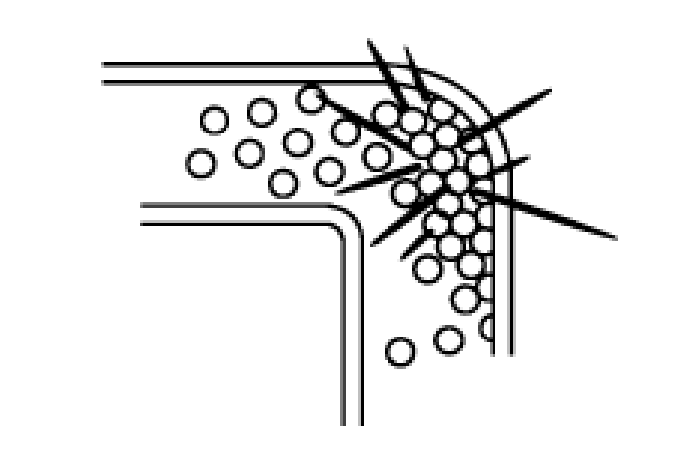
ของเหลวที่ไหลในท่อตรงแล้วมาถึงจุดโค้ง จะต้องเปลี่ยนทิศทางอย่างฉับพลัน โมเลกุลของของไหลชนกันและชนกับผนังท่อ — ซึ่งก็เป็นอีกสาเหตุหนึ่งที่ก่อให้เกิดความร้อน ขึ้นอยู่กับขนาดของท่อ ข้อศอกแบบ 90° เพียงชิ้นเดียวอาจก่อให้เกิดความร้อนได้มากเท่ากับท่อตรงหลายฟุต
ความต่างของความดัน คือ ความแตกต่างของความดันระหว่างสองจุดใดๆ ในระบบ ความต่างของความดันบ่งบอกข้อมูลสองประการ ดังนี้:
ตัวอย่าง: มาตรวัดแรงดัน 1 แสดงค่า 200 psi (13.79 บาร์); มาตรวัดแรงดัน 2 แสดงค่า 180 psi (12.41 บาร์) ความต่างของแรงดัน = 20 psi (1.38 บาร์) ซึ่งหมายความว่า:

รูปที่ 2-19 ความต่างของแรงดัน ค่าลดลง 20 psi บนส่วนท่อนี้แสดงว่ามีการไหลเกิดขึ้น และระบุปริมาณพลังงานไฮดรอลิกที่สูญเสียไปในรูปของความร้อนจากแรงเสียดทาน
การแปลงพลังงานไฮดรอลิกเป็นความร้อนหมายความว่าระบบกำลังสูญเสียพลังงานโดยเปล่าประโยชน์ เพื่อเพิ่มประสิทธิภาพ ผู้ออกแบบจำเป็นต้องเลือกความหนืดของน้ำมันให้เหมาะสม กำหนดขนาดท่อให้ถูกต้อง และลดจำนวนโค้งและข้อต่อให้น้อยที่สุด ทั้งหมดนี้ช่วยลดความต้านทานการไหล จึงลดพลังงานที่สูญเสียไปในรูปของความร้อน

รูปที่ 2-20 การเกิดความร้อนในวงจรจริง ท่อ ข้อต่อ จุดโค้ง และวาล์วแต่ละชิ้นล้วนมีส่วนทำให้เกิดการลดลงของแรงดันและการสูญเสียพลังงาน
สูตรสำคัญ - บทที่ 2
|
แนวคิด |
สูตร |
หน่วย / หมายเหตุ |
|
กฎของปาสคาล / ความดัน |
P = F / A |
psi = ปอนด์ต่อตารางนิ้ว | bar = นิวตันต่อตารางเมตร × 100,000 |
|
แรงที่เกิดจากความดัน |
F = P × A |
ปอนด์ = psi × ตารางนิ้ว |
|
การคูณแรง |
F_out = (A_out / A_in) × F_in |
อัตราส่วนของพื้นที่หน้าตัดของลูกสูบกำหนดค่าการเพิ่มแรง |
|
การเพิ่มแรงดัน |
P_out = (A_in / A_out) x P_in |
พื้นที่ขาออกที่เล็กลง = แรงดันขาออกที่สูงขึ้น |

ยินดีต้อนรับสู่ Hovoo โรงงานปักผนึกจีน ผลิตปักผนึก PU, ยาง และ PTFE ปักผนึกประกอบด้วย O-ring, ปักผนึกพิสตอง, ปักผนึกไม้, ปักผนึกแหวนสีเทาและปักผนึกแก๊ส



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}