33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]
33-99 ถนนมูฟู่ อี เขตกูลั่ว เมืองหนานจิง ประเทศจีน [email protected] | [email protected]

การออกแบบเครื่องทุบหินไฮดรอลิกหมายถึงการคำนวณพารามิเตอร์เชิงโครงสร้างที่จะทำให้สอดคล้องกับข้อกำหนดด้านประสิทธิภาพซึ่งระบุไว้ในเอกสารข้อกำหนดการออกแบบ ภายใต้พารามิเตอร์เชิงโครงสร้างเหล่านี้ เครื่องทุบหินไฮดรอลิกสามารถสร้างพลังงานกระแทกและอัตราการกระแทกตามที่ต้องการได้
จำเป็นต้องเน้นย้ำอย่างยิ่งว่า เครื่องทุบหินไฮดรอลิกสร้างพลังงานกระแทกและอัตราการกระแทกผ่านการเคลื่อนที่ไปมาของลูกสูบภายในช่วงการเคลื่อนที่ที่กำหนดไว้ S ภายในตัวถังกระบอกสูบ ลูกสูบเคลื่อนที่เป็นวงจรต่อเนื่องตามระยะชักคงที่นี้: การเร่งความเร็วในจังหวะย้อนกลับ → การชะลอความเร็วในจังหวะย้อนกลับ (การเบรก) → ความเร็วในจังหวะย้อนกลับลดลงจนถึงศูนย์ → การเร่งความเร็วในจังหวะให้พลังงาน → กระทบจุดชนด้วยความเร็วสูงสุด v m → กระทบปลายของหัวสกัด (ปล่อยพลังงานการกระแทก) → หยุดนิ่ง จากนั้นเริ่มวงจรถัดไป ระยะชักคงที่นี้ S เรียกว่า ระยะชักของลูกสูบ (piston stroke) ซึ่งเป็นพื้นฐานสำคัญในการกำหนดขนาดของตัวถังกระบอกสูบ
ลูกสูบเคลื่อนที่ไป-มาภายในตัวถังกระบอกสูบ เริ่มจากจุดชน ลูกสูบเร่งความเร็วในจังหวะย้อนกลับจนถึงความเร็วสูงสุดในจังหวะย้อนกลับ v โมลิบดีนัม (Mo) จากนั้นจึงเริ่มชะลอความเร็วเนื่องจากการสลับวาล์ว ความเร็วลดลงอย่างรวดเร็วจาก v โมลิบดีนัม (Mo) ถึงศูนย์ — ลูกสูบหยุดนิ่งที่จุดตายบน (Top Dead Center) การเคลื่อนที่ของลูกสูบที่เกิดขึ้นในช่วงนี้เรียกว่า "การเคลื่อนที่กลับ" (Return Stroke) ณ จุดนี้ เนื่องจากวาล์วยังคงอยู่ในสถานะเดิม ลูกสูบจึงเริ่มเร่งความเร็วในระหว่างการเคลื่อนที่เพื่อให้เกิดแรงกระแทก (Power Stroke) จนกระทั่งชนกับปลายของหัวเคาะ (Chisel Tail) เมื่อลูกสูบสัมผัสกับปลายหัวเคาะ ความเร็วของมันจะถึงค่าสูงสุด — ซึ่งเรียกว่า "ความเร็วสูงสุดในการกระแทกของลูกสูบ" v m การเคลื่อนที่ของลูกสูบตั้งแต่จุดตายบนไปจนกระทั่งชนกับปลายหัวเคาะนั้นเรียกว่า "การเคลื่อนที่เพื่อให้เกิดแรงกระแทก" (Power Stroke) อย่างชัดเจน การเคลื่อนที่กลับ (Return Stroke) และการเคลื่อนที่เพื่อให้เกิดแรงกระแทก (Power Stroke) จะต้องมีขนาดเท่ากัน
เพื่อศึกษาทฤษฎีการออกแบบเครื่องทุบหินไฮดรอลิก (Hydraulic Rock Breaker) อย่างลึกซึ้งยิ่งขึ้น จะเป็นประโยชน์อย่างยิ่งหากเข้าใจก่อนว่า ความเร็วของลูกสูบ ความดันภายในห้องต่าง ๆ และการกระจายและเปลี่ยนแปลงของการไหลของของเหลวในระหว่างการปฏิบัติงานเป็นอย่างไร สาเหตุและทิศทางของการเปลี่ยนแปลงพารามิเตอร์การทำงานของเครื่องทุบหินไฮดรอลิกในระหว่างการใช้งานแสดงไว้ในรูปที่ 2-4 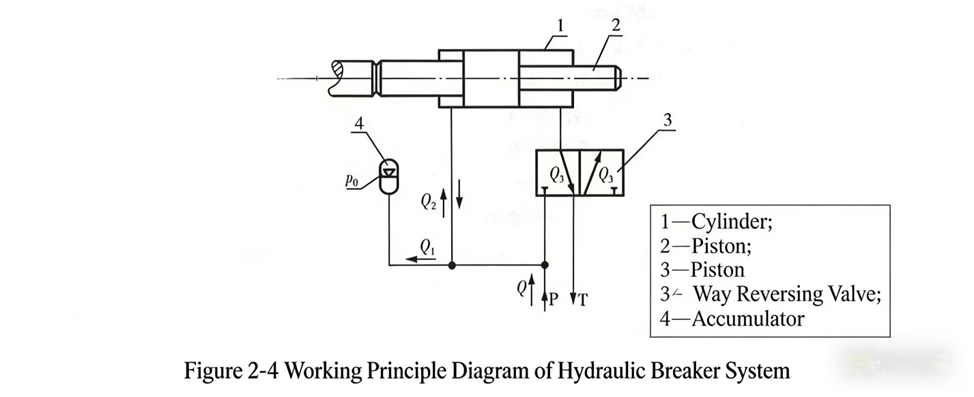
p 0คือความดันเริ่มต้นของไนโตรเจน (Nitrogen Pre-charge Pressure) ภายในแอคคิวมูเลเตอร์ Q คืออัตราการไหลที่ปั๊มส่งไปยังเครื่องทุบหินไฮดรอลิก Q 1คืออัตราการไหลเข้า (+) และอัตราการไหลออก (−) ของแอคคิวมูเลเตอร์ Q 2คืออัตราการไหลเข้า (+) และอัตราการไหลออก (−) ของห้องด้านหน้าลูกสูบ โดยที่ Q = Q 1 + Q 2. Q 3คืออัตราการไหลเข้า (+) และอัตราการไหลออก (−) ของห้องด้านหลังลูกสูบ p คือความดันของระบบ
รูปที่ 2-4 แสดงลูกสูบอยู่ที่จุดเริ่มต้นของการเคลื่อนที่กลับ (return stroke) อัตราการไหลของปั๊ม Q ไหลเข้าสู่ระบบ ส่วนหนึ่ง ( Q 2) ไหลเข้าสู่ห้องด้านหน้าลูกสูบและขับให้ลูกสูบเคลื่อนที่กลับ ในขณะที่ห้องด้านหลังลูกสูบปล่อยน้ำมันกลับสู่ถัง ( Q 3); ส่วนที่เหลือ ( Q 1) ไหลเข้าสู่แอคคิวมูเลเตอร์และอัดก๊าซไนโตรเจน ทำให้ความดันของระบบ p เริ่มต้นจากความดันเริ่มต้น (pre-charge pressure) ของแอคคิวมูเลเตอร์ p 0และเพิ่มขึ้นอย่างต่อเนื่องเมื่อ Q 1ไหลเข้ามา ลักษณะการเคลื่อนที่ของเครื่องทุบหินไฮดรอลิก ซึ่งขึ้นอยู่กับสถานะการทำงานของลูกสูบ สามารถแบ่งออกได้โดยทั่วไปเป็นสามช่วง ดังที่อธิบายไว้ต่อไปนี้:
(1) ระยะลูกสูบกลับ (return-stroke) และเร่งความเร็ว
ลูกสูบเริ่มต้นการเคลื่อนที่ย้อนกลับจากจุดกระทบ เมื่อปั๊มฉีดน้ำมันอย่างต่อเนื่อง ความดันในระบบ p ↑ → ความเร็วของลูกสูบ v ↑ → Q 2↑ → Q 1↓ → Q 3↑ และน้ำมันยังคงถูกปล่อยออกไปยังถังเก็บต่อไป เนื่องจากความเร็วของลูกสูบ v ↑ → Q 2↑ → Q 1↓ จนกระทั่ง Q 1= 0 ลักษณะเด่นของช่วงนี้คือ v ↑ และ p ↑ เมื่อ Q 1= 0 จะเกิดจุดเปลี่ยนทิศทาง: ความดัน p ไม่เพิ่มขึ้นอีกต่อไป แต่ความเร็วของลูกสูบยังคงเพิ่มขึ้น (เนื่องจากยังมีแรงขับเคลื่อนสำหรับจังหวะการคืนตัวของลูกสูบอยู่) หลังจากจุดเปลี่ยนทิศทางนี้ เนื่องจาก v ↑ อัตราการไหลของปั๊ม Q ไม่สามารถตอบสนองความต้องการอัตราการไหลสำหรับการเคลื่อนที่ของลูกสูบได้อีกต่อไป กล่าวคือ Q 2 > Q เพื่อตอบสนองความต้องการอัตราการไหลของห้องด้านหน้าลูกสูบ ถังสะสมความดัน (accumulator) จึงจำเป็นต้องปล่อยน้ำมันออกมาเสริมส่วนที่ปั๊มขาดแคลน ตามหลักการสมดุลของอัตราการไหล Q 2 = Q + Q 1; ณ จุดนี้ Q 1คือ อัตราการไหลที่ไหลออกจากถังสะสมความดันเข้าสู่ห้องด้านหน้าลูกสูบ จนกระทั่ง v ↑ ถึง v = v โมลิบดีนัม (Mo) , วาล์วเปลี่ยนสถานะ และลูกสูบเข้าสู่ช่วงการลดความเร็วในจังหวะคืนกลับ
(2) การลดความเร็วของลูกสูบในจังหวะคืนกลับ
ในระหว่างจังหวะคืนกลับ เนื่องจากไหล่ด้านหน้าของลูกสูบผ่านรูป้อนกลับแล้ว วาล์วจึงเปลี่ยนสถานะและกลับทิศทางของแรงที่กระทำต่อลูกสูบ แรงขับถูกส่งไปยังลูกสูบในทิศทางตรงข้าม ทำให้ลูกสูบเริ่มลดความเร็วลงจนกระทั่ง v = 0 จังหวะคืนกลับจึงเสร็จสมบูรณ์ ลูกสูบได้เคลื่อนที่มาถึงจุดตายบน (Top Dead Center) และเดินทางครบระยะจังหวะทั้งหมด S , พร้อมสำหรับการเริ่มต้นจังหวะกำลัง
(3) จังหวะกำลังของลูกสูบ
เมื่อความเร็วของลูกสูบลดลงจนถึง v = 0 แรงที่กระทำต่อลูกสูบจะกลับทิศทาง ส่งผลให้ความเร็วของลูกสูบ v ก็กลับทิศเช่นกัน จาก '+' เป็น '−' ลูกสูบจึงเริ่มเร่งความเร็วในจังหวะกำลังภายใต้แรงที่กลับทิศ ณ จุดเริ่มต้นของการเร่งความเร็วในจังหวะกำลัง ความเร็วของลูกสูบเริ่มต้นจาก v = 0 ซึ่งเป็นจุดที่การใช้น้ำมันหล่อลื่นของลูกสูบ Q 3= 0; ของเหลวทั้งหมดที่ถูกส่งออกจากปั๊ม Q ไหลเข้าสู่ถังสะสม (accumulator) Q 1 = Q , Q 2= 0 เมื่อความเร็วในช่วงแรงขับ (power-stroke velocity) v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑ ควรสังเกตที่นี่ว่า เนื่องจากพื้นที่ของห้องด้านหน้า เอ 2มีขนาดเล็กกว่าพื้นที่ของห้องด้านหลัง เอ 1จึงตามหลักการสมดุลของการไหล จำเป็นต้องมี Q 3 = Q 2 + Q − Q 1, กับ v ↑ และ Q 1↓ จนกระทั่ง Q 1= 0 สิ่งนี้หมายความว่า v ↑; ณ จุดนี้ ของเหลวทั้งหมดที่ถูกส่งออกจากปั๊ม Q ถูกฉีดเข้าไปยังห้องด้านหลังของลูกสูบอย่างเต็มที่ กล่าวคือ Q 3 = Q , Q 1= 0 แต่ความเร็วของลูกสูบ v ยังไม่ถึงความเร็วสูงสุด v m ลูกสูบยังคงเร่งความเร็วต่อไป; อัตราการไหลของปั๊ม Q ไม่สามารถตอบสนองความต้องการได้อีกต่อไป ดังนั้นแอคคิวมูเลเตอร์จึงเริ่มเสริมอัตราการไหล กล่าวคือ Q 3 = Q + Q 1(−) จนกระทั่งลูกสูบกระทบกับส่วนท้ายของเครื่องเจาะที่ความเร็วสูงสุด v m ในขณะที่เกิดการกระทบ ความเร็วของลูกสูบจะลดลงอย่างฉับพลันเป็น v = 0 และลูกสูบจะส่งผ่านพลังงานการกระทบออกไปภายนอก W ซึ่งสิ้นสุดหนึ่งรอบการทำงาน
เมื่ออัตราการไหลเข้า-ออกของแอคคิวมูเลเตอร์ Q 1เปลี่ยนแปลง ความดันของระบบ p ก็จะเปลี่ยนแปลงตามไปด้วย ขณะที่กำลังชาร์จแอคคิวมูเลเตอร์ Q 1= '+', ความดันของระบบ p ↑; เมื่อถังเก็บพลังงานปล่อยน้ำมันออกสู่ภายนอก, Q 1= '−', ความดันของระบบ p ↓ กล่าวอีกนัยหนึ่ง กระบวนการทำงานของเครื่องทุบหินไฮดรอลิกจะมาพร้อมกับการเปลี่ยนแปลงของความดันระบบเสมอ เมื่อมีน้ำมันเข้าไปในถังเก็บพลังงานมากที่สุด ความดันของระบบจะอยู่ในระดับสูงสุด และเมื่อตัวลูกสูบเคลื่อนที่ไปถึงจุดกระทบ ถังเก็บพลังงานจะปล่อยน้ำมันออกมากที่สุด — ซึ่งเป็นช่วงเวลาที่ความดันของระบบต่ำที่สุด ดังนั้น ตั้งแต่เริ่มต้นการทำงานของเครื่องทุบหินไฮดรอลิกจนถึงภาวะการทำงานคงที่ ความดันในการทำงานของระบบนั้น p จะเปลี่ยนผันสลับไปมาอย่างต่อเนื่องระหว่างความดันสูงสุด p สูงสุด กับความดันต่ำสุด p น้อยที่สุด และเป็นไปไม่ได้อย่างสิ้นเชิงที่ความดันนี้จะคงที่และไม่มีการเปลี่ยนแปลงเลย รูปที่ 2-5 แสดงการเปลี่ยนแปลงของพารามิเตอร์ทั้งหมดในระบบขณะที่เครื่องทุบหินไฮดรอลิกกำลังทำงาน 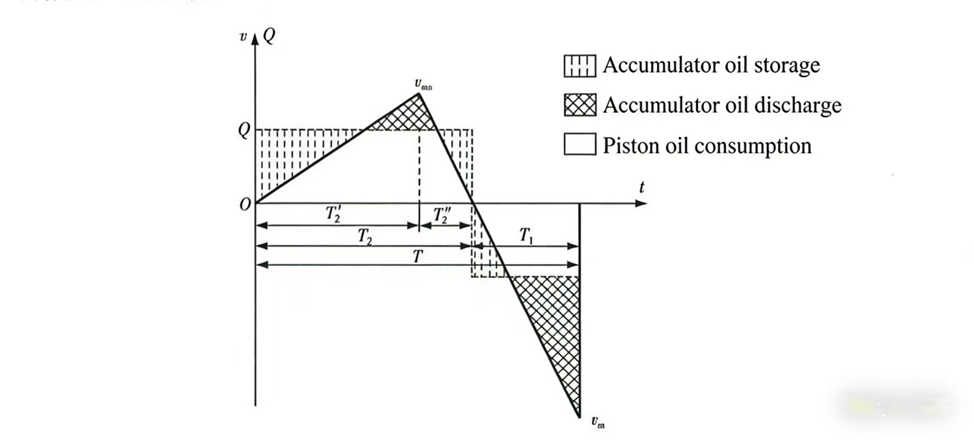
รูปที่ 2-5 การเปลี่ยนแปลงของพารามิเตอร์ระบบระหว่างการดำเนินงานของเครื่องสกัดหินไฮดรอลิก [คำอธิบายภาพ: พื้นที่แรเงา = การชาร์จแอคคิวมูเลเตอร์; พื้นที่แรเงาแนวทแยงสองชั้น = การปล่อยพลังงานจากแอคคิวมูเลเตอร์; พื้นที่สีขาว = การใช้น้ำมันสำหรับลูกสูบ]
กระบวนการทำงานที่อธิบายข้างต้นแสดงให้เห็นว่า การเปลี่ยนแปลงของพารามิเตอร์การทำงานนั้นมีความซับซ้อนค่อนข้างมาก — นับเป็นระบบที่ไม่เป็นเชิงเส้น ซึ่งก่อให้เกิดความยากลำบากอย่างมากต่อการวิเคราะห์และวิจัยเชิงทฤษฎีอย่างลึกซึ้ง แท้จริงแล้ว นี่คือหนึ่งในสาเหตุหลักที่ทำให้การวิจัยเชิงทฤษฎีเกี่ยวกับเครื่องสกัดหินไฮดรอลิกตามหลังการพัฒนาผลิตภัณฑ์
นักวิจัยทั่วโลกโดยทั่วไปได้นำแนวทางทางเทคนิคสองแบบที่แตกต่างกันมาใช้ในการวิจัยเชิงทฤษฎีเกี่ยวกับอุปกรณ์กระแทกไฮดรอลิก (เครื่องสกัดหินไฮดรอลิก) ได้แก่ การวิจัยที่อิงทฤษฎีระบบเชิงเส้น และการวิจัยที่อิงทฤษฎีระบบไม่เป็นเชิงเส้น
1) การวิจัยที่อิงตามทฤษฎีระบบเชิงเส้นสมมุติว่าแรงที่กระทำต่อลูกสูบมีค่าคงที่ ความเร็วของลูกสูบเพิ่มขึ้นแบบเชิงเส้นด้วยอัตราที่สม่ำเสมอ และละเลยปัจจัยบางประการที่มีอิทธิพล; จากพื้นฐานนี้จึงสร้างแบบจำลองทางคณิตศาสตร์เชิงเส้นขึ้นเพื่อใช้ในการวิจัยเชิงทฤษฎี วิธีการวิจัยนี้ชัดเจนและง่ายดาย สามารถแก้ปัญหาบางอย่างในทางปฏิบัติได้ แต่ให้ความแม่นยำไม่มากนัก และมีความคลาดเคลื่อนค่อนข้างสูง
2) การวิจัยที่อิงตามทฤษฎีระบบไม่เชิงเส้นใช้สมการเชิงอนุพันธ์อันดับสูงที่ไม่เป็นเชิงเส้นในการอธิบายรูปแบบการเคลื่อนที่ของเครื่องทุบหินไฮดรอลิก ซึ่งสามารถแสดงลักษณะการเคลื่อนที่ (kinematics) และพลศาสตร์ (dynamics) ของลูกสูบเครื่องทุบหินไฮดรอลิกได้อย่างแม่นยำยิ่งขึ้น การวิจัยแบบไม่เชิงเส้นนี้มีความแม่นยำมากกว่าการวิจัยแบบเชิงเส้น แต่ยังคงอาศัยสมมุติฐานบางประการอยู่ แม้จะสามารถเปิดเผยปรากฏการณ์ทางกายภาพบางประการของแรงกระแทกไฮดรอลิกได้อย่างแม่นยำยิ่งขึ้น แต่ก็ยากต่อการแก้ไข ตีความได้ยาก และสามารถให้คำตอบในรูปแบบตัวเลขเท่านั้นผ่านการคำนวณด้วยคอมพิวเตอร์ ซึ่งทำให้การนำไปใช้งานไม่สะดวก
นอกเหนือจากสองแนวทางนี้แล้ว ผู้เขียนหลังจากการวิจัยอย่างตั้งใจเป็นเวลานานหลายปี ได้เสนอ ทฤษฎีการออกแบบตัวแปรเชิงนามธรรมสำหรับเครื่องสกัดหินไฮดรอลิก (กลไกกระทบแบบไฮดรอลิก) โดยใช้ทฤษฎีการออกแบบตัวแปรเชิงนามธรรม สามารถหาคำตอบเชิงวิเคราะห์สำหรับเครื่องสกัดหินไฮดรอลิกได้ ซึ่งจะช่วยเปิดเผยรูปแบบภายในของการเคลื่อนที่ของเครื่องสกัดหินไฮดรอลิกอย่างลึกซึ้ง และให้พื้นฐานเชิงทฤษฎีสำหรับการสร้างนวัตกรรมทางเทคนิคโดยผู้ใช้งาน
แนวทางการวิจัยทฤษฎีการออกแบบตัวแปรเชิงนามธรรมสำหรับเครื่องทุบหินไฮดรอลิก: ยอมรับความไม่เป็นเชิงเส้นของพารามิเตอร์การทำงานของเครื่องทุบหินไฮดรอลิก แต่ใช้การแปลงแรงเทียบเท่าเพื่อทำให้ระบบไม่เป็นเชิงเส้นนั้นมีลักษณะเป็นเชิงเส้น จึงสามารถศึกษาระบบด้วยวิธีการของระบบที่เป็นเชิงเส้นเพื่อหาคำตอบเชิงวิเคราะห์ได้ พารามิเตอร์การทำงานและพารามิเตอร์โครงสร้างของเครื่องทุบหินไฮดรอลิกที่ได้จากวิธีนี้มีความแม่นยำค่อนข้างสูง และการคำนวณก็ง่ายดาย ทฤษฎีการออกแบบตัวแปรเชิงนามธรรมสำหรับเครื่องทุบหินไฮดรอลิกจะได้รับการกล่าวถึงอย่างละเอียดในบทต่อๆ ไป

ยินดีต้อนรับสู่ Hovoo โรงงานปักผนึกจีน ผลิตปักผนึก PU, ยาง และ PTFE ปักผนึกประกอบด้วย O-ring, ปักผนึกพิสตอง, ปักผนึกไม้, ปักผนึกแหวนสีเทาและปักผนึกแก๊ส



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}