33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]
33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]

Teoride, her hidrolik kaya kırıcı bir değişken basınçlı akümülatöre ihtiyaç duyar — özellikle büyük bir yüksek basınçlı akümülatöre.
Hidrolik kaya kırıcının sistem girişine monte edilen yüksek basınçlı akümülatör, üç amaç için kullanılır:
(1) Sistemdeki yağ sağlama fazlası ile tüketim açığını dengelemek için. Pompa debisi, sistem yağ tüketiminden büyük olduğunda yüksek basınçlı akümülatör fazla debiyi emer ve yağ depolama cihazı olarak işlev görür. Pompa debisi, sistem yağ tüketiminden küçük olduğunda ise eksikliği tamamlamak amacıyla yağ verir ve yağ verme cihazı olarak işlev görür. Yüksek basınçlı akümülatör, sistemin debi fazlası ve açığını dengeleme görevini üstlenir ve sistemin kararlı çalışması için önemli bir bileşendir.
(2) Sistem basınç dalgalanmalarını emerek küçük basınç zirvelerini azaltmak, boru hatlarını ve hidrolik bileşenleri korumak ve ömürlerini uzatmak için.
(3) Soyut değişken teorisi kullanılarak tasarlanan hidrolik darbe mekanizmalarında eşdeğer kuvvetin gerçeklenmesine yardımcı olur. Akümülatör doğru şekilde tasarlandığı sürece, hassas eşdeğer kuvvet elde edilebilir; bu da sistemin gerekli kinematik ve dinamik özelliklerini sağlamasını sağlar.
Yüksek basınçlı akümülatörün hidrolik kaya kırıcı sisteminde oynadığı önemli rol — ve özellikle sistemin gerekli kinematik ve dinamik özelliklerini sağlamadaki özel işlevi — göz önüne alındığında, doğru bir yüksek basınçlı akümülatör tasarım teorisi ve yöntemi oluşturmak son derece önemlidir.
Etkin boşaltım hacmi, akümülatörün önemli bir performans parametresidir ve aynı zamanda akümülatör tasarım hesaplamalarının temelini oluşturur. Bir hidrolik kaya kırıcı durağan durumda çalışırken, akümülatörün bir çevrim içinde depolayıp boşalttığı maksimum yağ hacmine etkin boşaltım hacmi denir ve Δ ile gösterilir. V .
Etkin boşaltım hacmi Δ V kinematik özelliklerle ilişkilidir. Pompa debisi sabitken ve hidrolik kaya kırıcının yapısı ile kinematiği sabitken, darbe enerjisi G H , frekans f H ve etkin boşaltım hacmi Δ V hepsi zorunlu olarak sabit değildir. Bu nedenle akümülatör tasarımı yapılırken etkili deşarj hacmi önceden bilinmektedir. Δ nasıl hesaplanır V sonraki bölümlerde açıklanacaktır.
Akümülatörün etkili hacminin hesaplanması için temel V bir gerçek etkili deşarj hacmi Δ'dir V . Δ V akümülatör içinde çalışırken sistem yağ basıncında mutlaka bir değişime neden olur ve eşdeğer kuvvet F g korunmak zorundadır. Dolayısıyla yukarıdaki gereksinimleri karşılayan akümülatör tasarım hesaplama yöntemi incelenmelidir. Akümülatörün çalışma sırasında basınç(kuvvet)–hacim diyagramı Şekil 3-2’de gösterilmiştir.
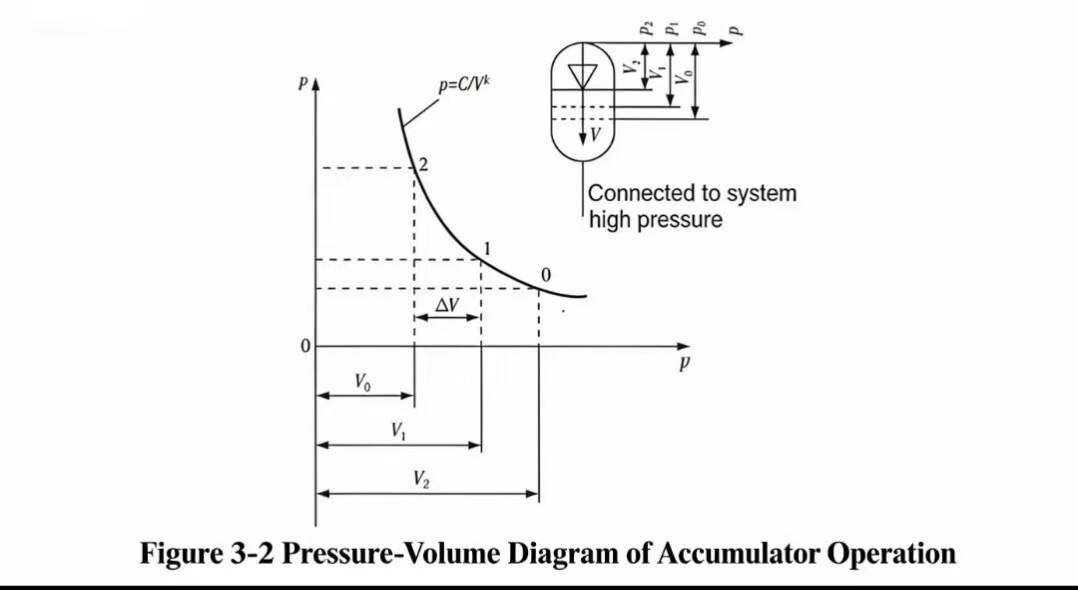
Hidrolik kaya kırıcının çalışma frekansı çok yüksek olmamakla birlikte, içindeki azotun sıkıştırılması ve genişlemesi süreci de oldukça hızlıdır; çevreye ısı aktarımı için yeterli zaman bulunmadığından bu süreç adyabatik bir süreç olarak kabul edilebilir. Gaz hal denkleminden:
p 1V k 1 = p 2V k 2 = p bir V k bir (3.12)
nerede: p bir — Şarj basıncı, yani kapalı gazın basıncı;
V bir — Şarj hacmi, yani pistonun darbe noktasında bulunduğu andaki akümülatör hacmi (genellikle maksimum çalışma hacmi); V amax );
p 2— Maksimum çalışma basıncı;
V 2— 'e karşılık gelen hacim; p 2(genellikle minimum çalışma hacmi); V 2dk );
p 1— Minimum çalışma basıncı;
V 1— 'e karşılık gelen hacim; p 1, V 1 < V bir .
Denklem (3.12)'de, k = 1,4 adyabatik üs değeridir. Açıkça:
δ V = V 1 − V 2 (3.13)
Denklem (3.12)'den:
V 1 = V bir (p bir / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
Denklem (3.13) yerine konulduğunda:
δ V = V bir (p bir / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
Denklem (3.16)’da p bir / p 1 = bir = 0,8 ila 1 arası olsun; ve gaz çalışma basınç oranı γ = p 2 / p 1, genellikle γ = 1,2 ila 1,45 arasıdır; bu değer, hidrolik kaya kırıcısının çalışma karakteristiklerine göre seçilir. Ne zaman ki bir = 1 olursa, pistonun minimum çalışma basıncı şarj basıncına eşit olur ( p bir = p 1); bu durumda V 1 = V bir . Hidrolik kaya kırıcısının minimum çalışma basıncında akümülatör membranının tabana temas etmesini — bu durum servis ömrünü kısaltırdı — önlemek için bir 1'den küçük olmalıdır.
Seçim için iki husus dikkate alınmalıdır γ : çünkü γ büyük olduğunda akümülatör adyabatik durumda çalıştığından sıcaklık hızla yükselir; bu da akümülatör membranının erken bozulmasına hatta yanmasına neden olabilir; ancak γ artırılması, akümülatörün etkin hacmini etkili bir şekilde azaltabilir V bir bu, akümülatörün yapısal boyutlarını küçültmek açısından oldukça faydalıdır. Tasarımcı, avantajlar ile dezavantajları dikkatle değerlendirmeli ve uygulama koşullarına göre karar vermelidir; dolayısıyla:
δ V = V bir bir 1/K (1 − 1 / γ 1/K ) (3.17)
Denklem (3.17)'den akümülatörün etkin hacmi bulunabilir:
V bir = Δ Vγ 1/K \/ [ bir 1/K (γ 1/K − 1)] (3.18)
Denklem (3.18), etkin deşarj hacmi Δ ile ilgili olarak, tasarlanan kinematik özelliklerin ve Δ değerinin sağlanabilmesi için karşılık gelen şarj hacminin belirlenebileceğini gösterir. V değerinin sağlanabilmesi için karşılık gelen şarj hacminin belirlenebileceğini gösterir. V etkin deşarj hacmi Δ V pratikte, akümülatörün güç stroku sırasında pistonu tamamlamak amacıyla pompaya yeterli miktarda yağ sağlamadığı durumlarda bu eksikliği gidermek için pistonun yanına eklediği yağ miktarıdır.
Etkin deşarj hacmi Δ V hesaplaması için lütfen Bölüm 7.5’e başvurunuz. Optimal tasarım gereksinimlerini karşılayabilmek amacıyla farklı tasarım amaçlarına göre etkin deşarj hacmi Δ V hesaplaması seçilen parametrelere göre değişir. α u (Bkz. Bölümler 7.2.5 ve 7.27a).
Bu noktada, ancak V bir bulunmuş ve akümülatörün yapısal parametrelerinin tasarımında kullanılabilir hâle gelmiş olsa da, akümülatör için tasarım hesaplama görevi henüz tamamlanmamıştır. En kritik sorun, eşdeğer kuvvetin sağlanmasını sağlamak amacıyla yağ basıncının nasıl kontrol edileceğidir; çünkü yalnızca eşdeğer kuvvet sağlanırsa tasarlanan kinematik de garanti altına alınabilir ve bu da dolayısıyla Δ V 'nın garanti altına alınmasını sağlar. Başka bir deyişle, Δ V ve F g .
Belirtmek gerekir ki, V bir sabit bir değer olduğunda, p 1, p 2, ve p bir birçok farklı kombinasyonla gerçeklenebilir; bu durum birden fazla eşdeğer kuvvet, birden fazla dinamik ve birden fazla kinematik — yani birden fazla Δ V değeri anlamına gelir. Aşağıdaki görev, sabit bir V bir verildiğinde, bu p 1, p 2, ve p bir gerekli eşdeğer kuvveti sağlayabilen F g ve Δ V . Çünkü когда p bir değiştiğinde, G H , f H , Δ V , p 1, ve p 2hepsi buna göre değişir. Başka bir deyişle, eşdeğer basıncı sağlamak için bir şarj basıncı bulunmalıdır p bir eşdeğer basıncı sağlamayı garanti edebilen p g . Elbette, p bir is p 1ve p 2yani eşdeğer basınç p g 'ı bulma yöntemi, bu parametreler arasındaki ilişkiler anlaşıldıktan sonra belirlenir p 1, p 2, ve p bir eşdeğer basınçtan p g incelenebilir.
Şekil 3-2, çalışma sırasında yüksek basınçlı akümülatörün p –V şemasını tanımlar. Bu şemaya dayanarak ve eşdeğer kuvvet ilkesini birleştirerek — değişken kuvvet tarafından yapılan iş, eşdeğer kuvvet tarafından yapılan işe eşittir — şu sonuca varıyoruz:
p g δ V = ∫ V₂ V₁ p d V (3.19)
Denklem (3.19)'da:
p = C / V k
Denklem (3.19)'a yerleştirilip integral alındığında:
p g δ V = C ∫V₂ V₁ d V / V k = 1 / (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
Dolayısıyla:
p g δ V = 1 / (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
Ortadan kaldırmak V 1ve V 2yerine koyma ve Denklem (3.17)’nin yerine konmasıyla elde edilir:
p g = p 1\/ ( k − 1) · ( γ − γ 1/K ) / ( γ 1/K − 1) (3.22)
Yeniden düzenlenmeden sonra:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
Denklem (3.23)'te, p g pistonun basınca maruz kalan yüzeyine uygulanan eşdeğer basıncıdır. Sistem basınç kayıplarını göz önünde bulundurarak, bu değer sistem nominal basıncı olarak ifade edilmelidir. p g = p H / K . p 1ve p 2bu şekilde elde edilen değerler gerçek değerlere daha yakındır. Dolayısıyla:
p 1= ( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p bir = - Evet. 1 (3.26)
Denklem (3.24)'te, sistem basınç kayıplarını dikkate alan direnç katsayısı K = 1,1 ila 1,2'dir.
Bir hidrolik kaya kırıcının yüksek basınçlı akümülatörü bu parametrelerde çalıştığında, eşdeğer kuvvet hareket etkisinin elde edilmesi, tasarlanan kinematik özelliklerin gerçekleştirilmesi ve gerekli darbe enerjisi ile darbe frekansının sağlanması garanti edilir. Bu sayede karmaşık bir hesaplama problemi basitleştirilir ve doğrusal olmayan bir problem doğrusal hâle getirilir.
Yukarıdakilere dayanarak, hidrolik darbe cihazı (hidrolik kaya matkabı ve hidrolik kaya kırıcısı) — yani doğrusal olmayan bir sistem — doğrusal bir sisteme dönüştürülür. Teorik açıdan bakıldığında, piston strok boyunca S herhangi bir desene göre hareket edebilir, ancak bu desen kontrol edilebilir olmalı ve darbe noktasında gerekli maksimum hıza ulaşmalıdır v m — Bunların tamamı mümkündür. Her piston hareket deseni için buna karşılık gelen bir kuvvet değişimi deseni olmalıdır; bu ikisi neden-sonuç ilişkisiyle bağlantılıdır. Başka bir deyişle, pistonun hangi hareket desenine sahip olduğu ne olursa olsun, buna karşılık gelen bir kuvvet değişimi deseni uygulanmak zorundadır — kuvvet neden, hareket ise sonuçtur.
Elbette, optimal hareket deseni tasarlandıktan sonra buna karşılık gelen kuvvet değişimi deseni de belirlenebilir; bu durum hidrolik kaya kırıcı araştırması için iki teorik konu ortaya çıkarır: hidrolik kaya kırıcının kinematiği ve dinamiği.

HOVOO'ya hoş geldiniz, bir Çin mühür fabrikası. PU, Gumus ve PTFE mühürlerinin üretimi. Mühürler O-ring, piston mühürü, çubuk mühürü, Gray ring ve gaz mühürü içerir.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}