33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]
33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]

Soyut değişken tasarım teorisinin araştırma fikri: bir hidrolik kaya kırıcısının çalışma parametreleri işlem sırasında nasıl değişirse değişsin, tasarım gereksinimlerini karşılayan iki parametre — darbe enerjisi G H ve darbe frekansı f H — değişmemelidir; diğer parametreler ise tasarımcı için özellikle önemli değildir ve kullanıcı için hiç de önemli değildir. Ancak tasarımcı, piston stroku üzerinde özel olarak durmalıdır S , çünkü pistonun her davranışı sabit bir strok boyunca gerçekleşir S , ve piston stroku S yapı tarafından kısıtlanır — keyfi olamaz. Çok büyük bir strok, mekanik yapı tarafından izin verilmez; çok küçük bir strok ise darbe enerjisi ve darbe frekansı gereksinimlerini karşılayamaz. Başka bir deyişle, bu, hidrolik kaya kırıcısının çalışması üzerinde bir kısıtlamadır ve mutlaka bir optimal değer bulunmalıdır.
Gerçekte doğrusal olmayan bir sistem olan bir hidrolik kaya kırıcısının tasarım hesaplama problemi, doğrusal yöntemler kullanılarak nasıl ele alınmalıdır? Bu bölümün temel içeriğidir.
— Doğrusal Olmayan Bir Sistemin Doğrusal Bir Sisteme Dönüştürülmesine Yönelik Teorik Temel
Bir hidrolik kaya kırıcısı çalışırken sistem basıncı gibi çalışma parametreleri p , piston hızı v , ivme bir ve piston yükü — hepsi doğrusal olmayan şekilde değişir ve zamanın fonksiyonudur. Böyle bir sistemin hesaplanması oldukça zor ve karmaşıktır. Ancak bu kitaptaki tasarım amacı görece basittir: gerekli darbe enerjisini sağlayabilen bir hidrolik kaya kırıcısının yapısal parametrelerini ve çalışma parametrelerini belirlemek. G H ve sıklığı f H darbe enerjisi formülü şöyledir:
G H = ( m / 2) v 2m (3.1)
nerede: m — piston kütlesi, sabit;
v m — Pistonun çekiç kuyruğuna çarptığı andaki anlık hız; yani maksimum darbe hızıdır; bu hız, tasarımda mutlaka sağlanması gereken hızdır.
Gerekli darbe enerjisinin sağlanmasını garanti etmek için iki koşul vardır: pistonun belirli bir kütlesi ve belirli bir hızı olmalıdır. Bir hidrolik kaya kırıcısı için piston kütlesi m hareket sırasında değişemez. Dolayısıyla darbe enerjisinin sağlanmasını sağlamak, maksimum darbe hızının v m ulaşılmasını sağlamak demektir.
Piston hareketinin belirli bir strok boyunca gerçekleştiği vurgulanmalıdır. Başka bir deyişle, hidrolik kaya kırıcısının tasarım hesaplamasının amacı, belirli bir strok boyunca sabit kütleli bir pistonun belirtilen maksimum darbe hızına tam olarak hızlandırılmasını sağlamaktır v m belirtilen çevrim süresi içinde T , çekiç kuyruğuna çarparak belirtilen darbe enerjisini üretir G H . Hareket sırasında bir , v , ve p nın anlık değişimleri tasarım hesaplama amacına yönelik değildir ve ihmal edilebilir. T çevrim süresinin sağlanması aynı zamanda belirtilen darbe frekansının da sağlanmasını garanti eder f H .
Döngü süresi T ve darbe frekansı f H memnun etmek f H = 60 / T , burada T pistonun çalışma çevrim süresidir (hesaplamanın basitleştirilmesi amacıyla darbe noktasında kısa süreli duruş ihmal edilmiştir).
Yukarıdaki amacı gerçekleştirmek için basit bir tasarım hesaplama yöntemi bulunabilirse, bu durum mühendislik tasarımı açısından faydalı olacaktır. Bilindiği gibi, hidrolik yağ basıncı pistonu harekete geçirerek iş yapar; enerjinin korunumu yasasına dayanarak ve diğer enerji kayıplarını göz ardı ederek, bu işin tamamı pistonun kinetik enerjisine dönüşür ve dışarıya aktarılır; bu durum aşağıdaki ilişkiyi verir:
(m / 2) v 2m = ∫ 0S F (S ) D S (3.2)
Denklem (3.2)'nin fiziksel anlamı: Sağ taraf, değişken kuvvetin F (S ) tarafından yapılan işi ifade eder S ; sol taraf ise pistonun aynı strok boyunca kazandığı kinetik enerjiyi gösterir. S .
Doğrusallaştırılmış hesaplama elde etmek için aynı strok boyunca değişken kuvvet F g ) tarafından yapılan işe eşit iş yapan sabit bir kuvvet F (S ) düşünülebilir. S dolayısıyla bu sabit kuvvet F g değişken kuvveti yerine kullanılabilecektir. F (S doğrusallaştırılmış hesaplama ile eşit etkiyle, şunu verir:
(m / 2) v 2m = ∫ 0S F (S ) D S = F g × S (3.3)
Denklem (3.1)’in Denklem (3.3)’e yerleştirilmesi şunu verir:
F g = G H / S (3.4)
Denklem (3.4)’te sabit kuvvet F g eşdeğer kuvvet olarak adlandırılır; değişken kuvvetle tam olarak aynı işi yapar F (S ).
Denklem (3.4), eşdeğer kuvvetin hesaplanması için kullanılan formüldür. Darbe enerjisi G H = ( m /2)v 2m tasarım görevi tarafından belirlenir ve bilinen bir parametredir. Strok S kinematik hesaplamalardan elde edilebilir ve ayrıca bilinir; bu nedenle gerekli darbe enerjisini sağlamak için gereken eşdeğer kuvvet hesaplanabilir. Tasarım stroku S ve frekans f H , ayrıca strokun optimizasyonu S , ilerleyen bölümlerde aşama aşama ele alınacaktır.
Bu eşdeğer kuvvet, hidrolik kaya kırıcı tasarım hesaplamalarında oldukça kullanışlıdır. Eşdeğer kuvvete dayanarak pistonun basınç taşıma alanı — yani pistonun yapısal boyutları — belirlenebilir, akümülatörün çalışma koşulları ve etkin hacmi tespit edilebilir ve hidrolik kaya kırıcının kinematik ile dinamik hesaplamaları yapılabilir.
Pistonun basınç taşıma alanı şöyledir:
Bir = F g / p g (3.5)
Denklem (3.5)'te p g sistemin eşdeğer yağ basıncıdır ve bu, eşdeğer kuvvet kavramına karşılık gelir; ayrıca bu bir sanal değişkendir. Ancak yağın hareketi sırasında direnç oluştuğu göz önünde bulundurulduğunda, sistemin gerçek çalışma yağ basıncı, eşdeğer yağ basıncından daha yüksek olmalıdır; dolayısıyla tasarım aşamasında kullanılan nominal basınç şu şekildedir:
p H = KP g (3.6)
Denklem (3.6)'da K = 1,12 ila 1,15 arası değer, hidrolik sistem çalışması için direnç katsayısıdır. Değerin p H uygulamada, tasarlanan sistemin genel gereksinimlerine dayanarak seçilir; bu nedenle pistonun basınca dayanıklı alanı hesaplanabilir ve bilinir hale gelir. Dolayısıyla:
Bir = KF g / p H (3.7)
Denklem (3.4) yerine konulduğunda:
Bir = Kw H \/ ( p H S ) (3.8)
Yukarıda hesaplanan kinematik ve dinamik sonuçların tamamen gerçekçi olmadığı, bunların doğrusal olarak değişen şekilde tanımlandığı belirtilmelidir; yani piston hareketi, düzgün ivmelenen ve düzgün yavaşlayan olarak kabul edilir. Ancak piston çevrim süresi T , maksimum hız v m ve hareket stroku S gerçek değerlerdir; tasarım gereksinimlerini karşılamak için bunlar basit, pratik ve doğru değerlerdir.
Aslında en kritik soru, darbe enerjisinin G H , darbe frekansının f H , ve akış Q hidrolik kaya kırıcıyı çalıştıran gerçek değerlerdir. Çünkü pistonun basınca dayanma alanı Bir sabit ve strok S sabit olduğundan, pompa debisinin de Q zorunlu olarak gerçek olması gerekir.
Bu şekilde, eşdeğer kuvvet ilkesi uygulanarak doğrusal olmayan hidrolik kaya kırıcı tasarım hesaplaması doğrusal bir hale getirilebilir; hem kinematik hem de dinamik hesaplamalar büyük ölçüde basitleştirilebilir ve sabit ivmeli ve sabit yavaşlayan hareket olarak ele alınabilir.
Eşdeğer kuvvet kavramının akademik içgörüsü, karmaşık süreci göz ardı ederek sorunun özünü kavramak ve doğrusal olmayan problemi doğrusallaştırmaktır. Ancak elde edilen sonuçlar oldukça gerçekçi ve güvenilirdir ve hidrolik kaya kırıcının çalışma prensiplerini daha derinlemesine anlama ve inceleme açısından yardımcı olur.
Eşdeğer kuvvet ilkesine dayanarak, piston hızı ve kuvvetleri Şekil 3-1’de gösterildiği gibi üç aşamadan oluşur: geri dönüş stroku ivmelenmesi, geri dönüş stroku yavaşlaması (frenleme) ve güç stroku.
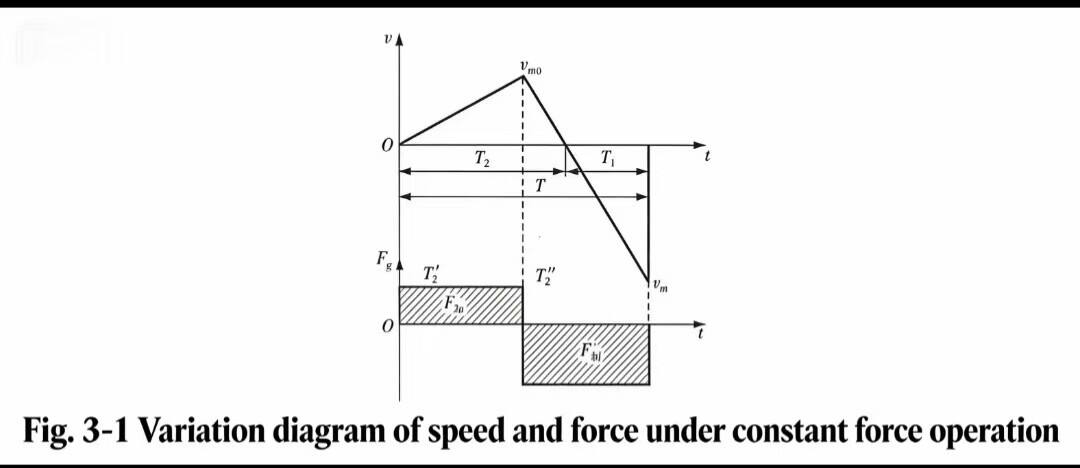
(1) Piston geri dönüş stroku ivmelenme aşaması için dinamik denklem
Geri dönüş stroku tahrik kuvvetini F 2g , hızı v ve ivmesini bir [+] olarak tanımlayalım. Pistonun geri dönüş stroku sırasında ivmelenmesini sağlayan eşdeğer tahrik kuvveti şöyledir:
F 2g = p g Bir ′2 = mA 2 (3.9)
nerede: bir 2= [+] — pistonun geri dönüş stroku ivmesi;
Bir ′2— piston ön odasının etkin basınç taşıma alanı;
p g — sistemin eşdeğer basıncı.
(2) Piston geri dönüş stroku yavaşlama aşaması için dinamik denklem
Geri dönüş strokunda pistonu yavaşlatan eşdeğer tahrik kuvveti şudur:
F 3g = p g Bir ′1 = mA 3 (3.10)
nerede: bir 3= [−] — geri dönüş strokunda pistonun yavaşlaması (frenlenmesi).
(3) Piston güç stroku aşaması için dinamik denklem
Güç strokunda pistonu hızlandıran eşdeğer tahrik kuvveti şudur:
F 1G = p g Bir ′1 = mA 1 (3.11)
nerede: bir 1= [−] — güç strokunda pistonun ivmesi;
Bir ′1— piston arka odasının etkin basınç taşıma alanı.
Etkin basınç taşıma alanı kavramı, yukarıda açıklanan hidrolik kaya kırıcısının üç farklı çalışma prensibine göre değişir; bu kavram, dinamik bölümde ayrıntılı olarak ele alınmıştır.

HOVOO'ya hoş geldiniz, bir Çin mühür fabrikası. PU, Gumus ve PTFE mühürlerinin üretimi. Mühürler O-ring, piston mühürü, çubuk mühürü, Gray ring ve gaz mühürü içerir.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}