33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]
33-99 No. Mufu E Cd. Gulou Bölgesi, Nanjing, Çin [email protected] | [email protected]

Hidrolik kaya kırıcı tasarımı, tasarım spesifikasyonunda belirtilen performans gereksinimlerini karşılayacak yapısal parametreleri hesaplamayı ifade eder. Bu yapısal parametreler altında, hidrolik kaya kırıcı gerekli darbe enerjisini ve darbe frekansını sağlayabilir.
Hidrolik kaya kırıcının sabit bir strok içinde ileri geri hareket eden piston aracılığıyla darbe enerjisi ve darbe frekansı çıkarttığı vurgulanmalıdır. S silindir gövdesi içinde. Bu sabit strok boyunca piston sürekli bir döngüde hareket eder: geri dönüş stroku ivmesi → geri dönüş stroku yavaşlaması (frenleme) → geri dönüş stroku hızı sıfıra düşer → güç stroku ivmesi → maksimum hızla darbe noktasına ulaşır v m → çekiç kuyruğuna çarpar (darbe enerjisi verir) → durur ve bir sonraki döngüyü başlatır. Bu sabit strok S piston stroku olarak adlandırılır; silindir gövdesi boyutlarının belirlenmesi için önemli bir temeldir.
Piston, silindir gövdesi içinde ileri geri hareket eder. Darbe noktasından başlayarak, geri dönüş stroku boyunca ivmelenir ve maksimum geri dönüş stroku hızına ulaşır v mo , ardından valf geçişi nedeniyle yavaşlamaya başlar; hız hızla v mo sıfıra — piston, üst ölü noktada durur. Pistonun aldığı bu harekete geri dönüş stroku denir. Bu noktada, valf hâlâ orijinal konumunda olduğu için piston, darbe noktasına ulaşana kadar güç stroku üzerinde hızlanmaya başlar. Piston, çekiç kuyruğuna temas ettiğinde hızı maksimum değere ulaşır — bu hız, pistonun maksimum darbe hızı olarak adlandırılır. v m pistonun üst ölü noktadan çekiç kuyruğuna temas ettiği noktaya kadar aldığı strok, güç stroku olarak adlandırılır. Açıkça görüldüğü üzere, geri dönüş stroku ve güç stroku birbirine eşit olmalıdır.
Hidrolik kaya kırıcı tasarım teorisini daha derinlemesine incelemek amacıyla, öncelikle piston hızını, çeşitli odacık basınçlarını ve çalışma sırasında akış dağılımını ile değişimini anlamak faydalı olur. Bir hidrolik kaya kırıcının çalışma parametrelerinde meydana gelen değişikliklerin nedenleri ve yönleri Şekil 2-4’te gösterilmiştir. 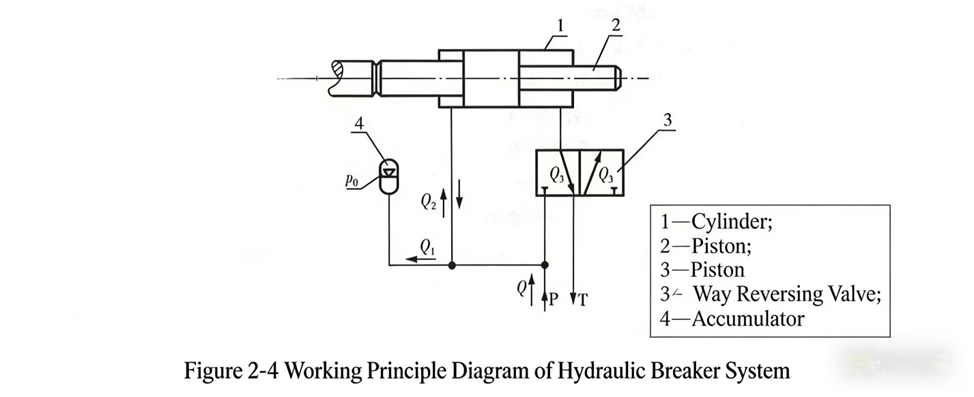
p 0akümülatörün azot ön şarj basıncıdır; Q pompanın hidrolik kaya kırıcıya sağladığı debidir; Q 1akümülatörün emme debisi (+) ve boşaltma debisidir (-); Q 2pistonun ön odasının emme debisi (+) ve boşaltma debisidir (-), burada Q = Q 1 + Q 2. Q 3pistonun arka odasının emme debisi (+) ve boşaltma debisidir (-); p sistem basıncıdır.
Şekil 2-4, pistonun geri dönüş stroku başlangıcını göstermektedir. Pompa debisi Q sisteme girer; bunun bir kısmı ( Q 2) pistonun ön odasına girer ve geri dönüş strokunu gerçekleştirirken, arka oda yağı tanka boşaltır ( Q 3); diğer kısmı ( Q 1) akümülatöre girer ve azotu sıkıştırır; bu nedenle sistem basıncı p akümülatörün önceden şarj edilme basıncından başlar p 0ve sürekli olarak yükselir Q 1akışa girer. Hidrolik kaya kırıcının hareketi, pistonun çalışma durumuna dayanarak genellikle üç aşamaya ayrılabilir; bu aşamalar aşağıda açıklanmıştır:
(1) Piston geri dönüş stroku ivmesi
Piston, darbe noktasından geri dönüş strokuna başlar. Pompa sürekli akış enjekte ettiği sürece sistem basıncı p ↑ → piston hızı v ↑ → Q 2↑ → Q 1↓ → Q 3↑ ve yağ, depoya sürekli olarak boşaltılır. Çünkü piston hızı v ↑ → Q 2↑ → Q 1↓, ta ki Q 1= 0 olana kadar. Bu dönemin özelliği v ↑ ve p ↑. Ne zaman Q 1= 0 olduğunda, bir dönüm noktası ortaya çıkar: basınç p artmaya devam etmez, ancak piston hızı artmaya devam eder (çünkü pistonun geri dönüş hareketini sağlayan itme kuvveti hâlâ mevcuttur). Bu dönüm noktasından sonra, çünkü v ↑, pompa debisi Q piston hareketi için gerekli debiyi karşılayamaz, yani Q 2 > Q . Piston ön odasının debi ihtiyacını karşılamak için akümülatör artık pompanın eksikliğini tamamlamak amacıyla yağ boşaltmalıdır. Debilerin dengesi ilkesine göre, Q 2 = Q + Q 1; bu noktada Q 1akümülatörden çıkan ve piston ön odasına akan debidir; bu durum, v ↑ olana kadar devam eder v = v mo , valf devreye girer ve piston geri dönüş stroku yavaşlatma aşamasına geçer.
(2) Piston Geri Dönüş Stroku Yavaşlaması
Geri dönüş stroku sırasında pistonun ön omuzu geri bildirim deliğini geçtikten sonra valf devreye girer ve pistona uygulanan kuvvetin yönünü tersine çevirir; tahrik kuvveti, piston üzerine ters yönde uygulanır ve piston sıfır hız değerine ulaşana kadar yavaşlamaya başlar. v = 0. Geri dönüş stroku tamamlanmıştır; piston üst ölü noktaya ulaşmış ve tam stroku tamamlamıştır. S , artık güç strokuna başlamak üzere hazırdır.
(3) Piston Güç Stroku
Piston hızı v = 0 değerine düştüğünde, pistona uygulanan kuvvet yön değiştirir ve bu nedenle piston hızı da '+' işaretinden '−' işaretine dönerek yön değiştirir. Piston, ters yönde uygulanan kuvvet altında güç strokuyla birlikte hızlanmaya başlar. Güç stroku hızlanmasının başlangıcında piston hızı v = 0 değerinden başlar; bu noktada piston yağ tüketimi v gerçekleşir. Q 3= 0; tüm pompa debisi Q akümülatöre akar, Q 1 = Q , Q 2= 0. Güç vuruşu hızı v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. Burada dikkat edilmesi gereken nokta, ön kamaranın alanı Bir 2arka kamaranın alanından daha küçük olduğu için Bir 1, akış dengesi ilkesine dayanarak, mutlaka Q 3 = Q 2 + Q − Q 1, ile v ↑ ve Q 1↓, ta ki Q 1= 0 olmasıdır. Bu, v ↑ anlamına gelir; bu noktada tüm pompa debisi Q tamamen pistonun arka kamerasına enjekte edilir, yani Q 3 = Q , Q 1= 0, ancak piston hızı v henüz maksimum hızına ulaşmamıştır v m . Piston ivmelenmeye devam eder; pompa debisi Q talebi artık karşılayamaz, bu nedenle akümülatör debiyi tamamlayarak devreye girer, yani Q 3 = Q + Q 1(−), piston maksimum hızla çekiç kuyruğuna çarptığında v m . Çarpma anında piston hızı aniden v = 0 olur ve piston dışarıya darbe enerjisi aktarır G , böylece bir çalışma çevrimi tamamlanmış olur.
Akümülatörün emme/boşaltma debisi Q 1değiştikçe sistem basıncı da p buna göre değişir. Akümülatör şarj edilirken Q 1= '+', sistem basıncı p ↑; akümülatör dışarıya boşaldığında, Q 1= '−', sistem basıncı p ↓. Başka bir deyişle, hidrolik kaya kırıcısının çalışma süreci boyunca sistem basıncında sürekli değişimler yaşanır. Akümülatöre en fazla yağ doldurulduğunda sistem basıncı en yüksek seviyededir. Piston darbe noktasına ulaştığında akümülatör en fazla yağı boşaltmıştır — bu, sistem basıncının en düşük olduğu andır. Dolayısıyla, hidrolik kaya kırıcısı çalıştırıldıktan sonra kararlı çalışmaya ulaşana kadar sistemin çalışma basıncı p her zaman maksimum basınç arasında ileri geri döner p maks. ve minimum basınç p min , ve bu basınç hiçbir şekilde sabit ve değişmez olamaz. Şekil 2-5, hidrolik kaya kırıcısının çalışması sırasında tüm sistem parametrelerindeki değişimi göstermektedir. 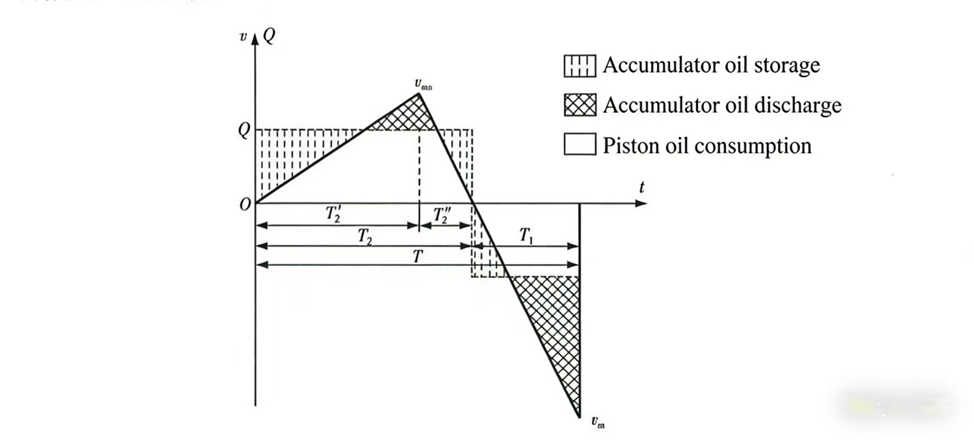
Şek. 2-5 Hidrolik kaya kırıcının çalışması sırasında sistem parametrelerindeki değişim [Açıklama: Taralı = akümülatörün şarj olması; çizgili taralı = akümülatörün deşarj olması; beyaz = piston yağ tüketimi]
Yukarıda açıklanan çalışma süreci, çalışma parametrelerindeki değişimin oldukça karmaşık olduğunu göstermektedir — bu bir doğrusal olmayan sistemdir. Bu durum, derinlemesine teorik analiz ve araştırmalar için önemli zorluklar yaratmaktadır. Aslında bu, hidrolik kaya kırıcılarla ilgili teorik araştırmaların ürün geliştirme çalışmalarının gerisinde kalmasının başlıca nedenlerinden biridir.
Dünya genelindeki araştırmacılar, hidrolik darbe cihazları (hidrolik kaya kırıcılar) üzerine yapılan teorik araştırmalarda genellikle iki farklı teknik yaklaşım benimsemiştir: doğrusal sistem teorisine dayalı araştırma ve doğrusal olmayan sistem teorisine dayalı araştırma.
1) Doğrusal sistem teorisine dayalı araştırma, piston üzerine etki eden kuvvetin sabit olduğunu, piston hızının düzgün bir oranda doğrusal olarak arttığını ve belirli etkileyici faktörlerin göz ardı edildiğini varsayar; bu temel üzerine teorik araştırmalar için doğrusal bir matematiksel model oluşturulur. Bu araştırma yöntemi açıkça basittir ve bazı pratik problemleri çözebilir, ancak oldukça düşük doğrulukta olup önemli hatalar içermektedir.
2) Doğrusal olmayan sistem teorisine dayalı araştırma, hidrolik kaya kırıcının hareket desenlerini tanımlamak için yüksek dereceden doğrusal olmayan diferansiyel denklemler kullanır ve hidrolik kaya kırıcı pistonunun kinematik ile dinamiğini daha doğru bir şekilde betimler. Bu doğrusal olmayan araştırma, doğrusal araştırmaya kıyasla daha doğrudur; ancak yine de bazı varsayımlara dayanmaktadır. Hidrolik darbenin bazı fiziksel fenomenlerini daha doğru bir şekilde ortaya koyması mümkün olsa da çözümü zor, yorumlanması kolay değil ve yalnızca bilgisayarla yapılan hesaplamalarla sayısal çözümler üretilebilir; bu da kullanımını zahmetli kılar.
Bu iki yaklaşımın yanı sıra, yazarlar, yıllar boyu sürdürdükleri yoğun araştırmaların ardından Hidrolik Kaya Kırıcılar İçin Soyut Değişken Tasarım Teorisi (hidrolik darbe mekanizmaları) önerdiler. Soyut değişken tasarım teorisini kullanarak hidrolik kaya kırıcılar için analitik çözümler elde edilebilir; bu da hidrolik kaya kırıcı hareketlerinin içsel desenlerini derinlemesine ortaya çıkarabilir ve kullanıcılar tarafından gerçekleştirilecek teknik yeniliklere teorik bir temel sağlayabilir.
Hidrolik kaya kırıcısının araştırma yaklaşımı olan soyut değişken tasarım teorisi: hidrolik kaya kırıcısının çalışma parametrelerinin doğrusal olmama özelliğini kabul eder; ancak doğrusal olmayan sistemi doğrusallaştırmak için eşdeğer kuvvet dönüşümü kullanır, böylece analitik çözümler elde edilebilmek üzere doğrusal sistem yöntemleriyle incelenebilir. Bu yöntemle elde edilen hidrolik kaya kırıcıların çalışma parametreleri ve yapısal parametreleri oldukça doğrudur ve hesaplama işlemi basittir. Hidrolik kaya kırıcısı soyut değişken tasarım teorisi, ilerleyen bölümlerde ayrıntılı olarak ele alınacaktır.

HOVOO'ya hoş geldiniz, bir Çin mühür fabrikası. PU, Gumus ve PTFE mühürlerinin üretimi. Mühürler O-ring, piston mühürü, çubuk mühürü, Gray ring ve gaz mühürü içerir.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}