چین، نانجینگ، گولو ضلع، موفو ای روڈ نمبر 33-99 [email protected] | [email protected]
چین، نانجینگ، گولو ضلع، موفو ای روڈ نمبر 33-99 [email protected] | [email protected]

نظریہ کے مطابق، ہر ہائیڈرولک راک بریکر کو متغیر دباؤ والے اکومولیٹر کی ضرورت ہوتی ہے — خاص طور پر ایک بڑے بلند دباؤ والے اکومولیٹر کی۔
بلند دباؤ والے اکومولیٹر کو ہائیڈرولک راک بریکر کے سسٹم کے ان لیٹ پر نصب کیا جاتا ہے، جو تین اہم مقاصد کے لیے استعمال ہوتا ہے:
(1) سسٹم کی فراہمی اور تیل کی مصرف کے درمیان زائد اور کمی کو توازن میں لانا۔ جب پمپ کی آؤٹ لیٹ سسٹم کے تیل کی مصرف سے زیادہ ہو تو بلند دباؤ والے اکومولیٹر زائد آؤٹ لیٹ کو جذب کرتا ہے اور تیل ذخیرہ کرنے والے آلے کے طور پر کام کرتا ہے۔ جب پمپ کی آؤٹ لیٹ سسٹم کے تیل کی مصرف سے کم ہو تو یہ تیل کو خارج کرتا ہے تاکہ کمی کو پُر کیا جا سکے، اور تیل خارج کرنے والے آلے کے طور پر کام کرتا ہے۔ بلند دباؤ والے اکومولیٹر سسٹم میں بہاؤ کی زائد اور کمی کو توازن میں لانے کا کام انجام دیتا ہے، اور یہ سسٹم کے مستحکم عمل کے لیے ایک اہم اجزاء ہے۔
(2) سسٹم کے دباؤ کے اتار چڑھاؤ کو جذب کرنا اور چھوٹے دباؤ کے اچانک اضافے کو کم کرنا، جس سے پائپ لائنز اور ہائیڈرولک اجزاء کی حفاظت ہوتی ہے اور ان کی عمر بڑھ جاتی ہے۔
(3) امتصالی دھچکا کے مکینزم کی تعمیر میں جس میں خلاصہ متغیر نظریہ کا استعمال کیا جاتا ہے، اس میں مساوی قوت کو حاصل کرنے میں مدد ملتی ہے۔ جب تک کہ اکومولیٹر کو درست طریقے سے ڈیزائن کیا جائے، درست مساوی قوت حاصل کی جا سکتی ہے، جس سے یہ یقینی بنایا جا سکتا ہے کہ نظام مطلوبہ حرکیات اور سانچے کی وضاحت کو حاصل کرتا ہے۔
ہائی پریشر اکومولیٹر کا ہائیڈرولک راک بریکر سسٹم میں اہم کردار ہونے کی وجہ سے — اور خاص طور پر اس کے خاص کام کی وجہ سے جو یہ ہے کہ نظام مطلوبہ حرکیات اور سانچے کی وضاحت کو حاصل کرے — ایک درست ہائی پریشر اکومولیٹر ڈیزائن نظریہ اور طریقہ کار کو قائم کرنا بہت اہم ہے۔
موثر ڈسچارج حجم اکومولیٹر کا ایک اہم کارکردگی کا پیرامیٹر ہے اور یہ اکومولیٹر کی ڈیزائن کی حساب کتاب کا بنیادی عنصر بھی ہے۔ جب ایک ہائیڈرولک راک بریکر مستقل حالت میں کام کرتا ہے، تو اکومولیٹر کے ذخیرہ کیے گئے اور ایک سائیکل میں ڈسچارج کیے گئے تیل کے زیادہ سے زیادہ حجم کو موثر ڈسچارج حجم کہا جاتا ہے، جسے Δ سے ظاہر کیا جاتا ہے۔ V .
موثر ڈسچارج حجم Δ V کنیماتکس کی خصوصیات سے متعلق ہے۔ جب پمپ کا فلو مقرر ہو اور ہائیڈرولک راک بریکر کی ساخت اور کنیماتکس مقرر ہو، تو اثر انداز توانائی W H ، فریکوئنسی ت H ، اور موثر ڈسچارج والیوم Δ V تمام لازمی طور پر مقرر ہو جاتے ہیں۔ اس لیے اکومولیٹر کی ڈیزائننگ کے دوران، موثر ڈسچارج والیوم پہلے ہی معلوم ہوتا ہے۔ Δ کا حساب لگانا V بعد کے بابوں میں بیان کیا جائے گا۔
اکومولیٹر کے موثر حجم کا حساب لگانے کا بنیاد V a اس کا حقیقی موثر ڈسچارج والیوم Δ V ہے۔ جب Δ V اکومولیٹر کے اندر کام کرتا ہے تو یہ ضروری طور پر سسٹم آئل کے دباؤ میں تبدیلی پیدا کرتا ہے، اور مساوی قوت ت جی برقرار رکھا جانا چاہیے۔ اس لیے، اوپر بیان کردہ ضروریات کو پورا کرنے والے اکومولیٹر کے ڈیزائن کے حساب کتاب کے طریقہ کار کا مطالعہ کرنا ضروری ہے۔ آپریشن کے دوران اکومولیٹر کا دباؤ (قوت)–حجم کا گراف شکل 3-2 میں دکھایا گیا ہے۔
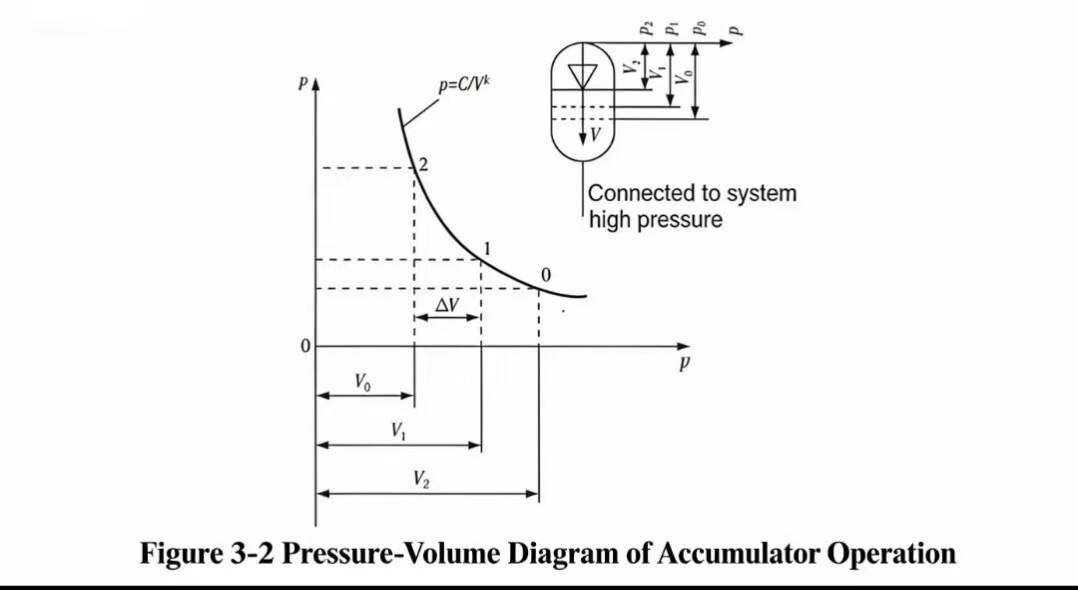
اگرچہ ہائیڈرولک راک بریکر کی کام کرنے کی فریکوئنسی بہت زیادہ نہیں ہوتی، تاہم اس کے اندر نائٹروجن کا سکواش اور پھیلنے کا عمل بھی کافی تیز ہوتا ہے، جس کے نتیجے میں اس کے اردگرد کے ماحول کے ساتھ حرارت کا تبادلہ کرنے کے لیے وقت کی کمی ہوتی ہے؛ اس لیے اسے ایک ایڈیابیٹک عمل کے طور پر سمجھا جا سکتا ہے۔ گیس کے حالت کے مساوات سے:
پی 1V ک 1 = پی 2V ک 2 = پی a V ک a (3.12)
جہاں: پی a — چارج دباؤ، یعنی سیل کردہ گیس کا دباؤ؛
V a — چارج حجم، یعنی اکومولیٹر کا حجم جب پسٹن اِمپیکٹ پوائنٹ پر ہو (عام طور پر زیادہ سے زیادہ کام کرنے کا حجم) V amax );
پی 2— زیادہ سے زیادہ کام کرنے کا دباؤ؛
V 2— کے مطابق حجم؛ پی 2(عام طور پر کم سے کم کام کرنے کا حجم) V 2min );
پی 1— کم سے کم کام کرنے کا دباؤ؛
V 1— کے مطابق حجم؛ پی 1, V 1 < V a .
معادلہ (3.12) میں، ک = 1.4 حرارتی معاملہ ہے۔ واضح طور پر:
δ V = V 1 − V 2 (3.13)
معادلہ (3.12) سے:
V 1 = V a (پی a / پی 1)1/k (3.14)
V 2 = V 1 (پی 1 / پی 2)1/k (3.15)
اسے معادلہ (3.13) میں تبدیل کرنے سے حاصل ہوتا ہے:
δ V = V a (پی a / پی 1)1/k [1 − 1 / ( پی 2 / پی 1)1/k ] (3.16)
معادلہ (3.16) میں، فرض کریں کہ پی a / پی 1 = a = 0.8 سے 1 تک؛ اور گیس کا کام کرنے والے دباؤ کا تناسب γ = پی 2 / پی 1عام طور پر γ = 1.2 سے 1.45 تک، جو ہائیڈرولک راک بریکر کی کام کرنے والی خصوصیات کے مطابق منتخب کیا جاتا ہے۔ جب a = 1 ہوتا ہے، پسٹن کا کم از کم کام کرنے والا دباؤ چارج دباؤ کے برابر ہوتا ہے ( پی a = پی 1)؛ اس حالت میں V 1 = V a ۔ ہائیڈرولک راک بریکر کے کم از کم کام کرنے والے دباؤ پر اکومولیٹر کی جھلی کے بنیاد سے ٹکرانے کو روکنے کے لیے — جو صارفی عمر کو کم کر دے گا — a کو 1 سے کم سیٹ کرنا چاہیے۔
کا انتخاب کرتے وقت دو باتوں پر غور کیا جاتا ہے: γ : جب γ بڑا ہوتا ہے، تو اکومولیٹر ایڈیابیٹک حالت میں کام کرتا ہے، جس کی وجہ سے درجہ حرارت تیزی سے بڑھ جاتا ہے، جو اکومولیٹر کی جھلی کے جلدی خراب ہونے یا اس کے جلنے کا باعث بن سکتا ہے؛ لیکن γ کو بڑھانا مؤثر طریقے سے موثر حجم کو کم کر سکتا ہے V a ایکومولیٹر کا، جو ایکومولیٹر کے ساختی سائز کو کم کرنے کے لیے بہت فائدہ مند ہے۔ ڈیزائنر کو فوائد اور نقصانات کا جائزہ لینا ہوگا اور درخواست کی حالتوں کے مطابق فیصلہ کرنا ہوگا؛ لہٰذا:
δ V = V a a 1/k (1 − 1 / γ 1/k ) (3.17)
معادلہ (3.17) سے، ایکومولیٹر کا موثر حجم تلاش کیا جا سکتا ہے:
V a = Δ Vγ 1/k / [ a 1/k (γ 1/k − 1)] (3.18)
معادلہ (3.18) ظاہر کرتا ہے کہ، موثر خالی کرنے کے حجم Δ V سے، متعلقہ چارج والیوم تلاش کیا جا سکتا ہے، تاکہ ڈیزائن کردہ کائنیمیٹکس اور Δ کو یقینی بنایا جا سکے V حاصل کیے جاتے ہیں۔ عملی طور پر، موثر خالی کرنے کا حجم Δ V تیل ہے جو اکومولیٹر پسٹن کو طاقت کے سٹروک کے دوران فراہم کرتا ہے تاکہ پمپ کی ناکافی فراہمی کو پُورا کیا جا سکے۔
موثر خالی کرنے کے حجم Δ کے ڈیزائن کے حساب کتاب کے لیے، V براہ مہربانی سیکشن 7.5 کا حوالہ دیں۔ بہترین ڈیزائن کی ضروریات کو پورا کرنے کے لیے، مختلف ڈیزائن کے مقاصد کے لیے، موثر خالی کرنے کے حجم Δ کا حساب کتاب منتخب شدہ V کے ساتھ تبدیل ہوتا ہے، α u (دیکھیں سیکشن 7.2.5 اور 7.27a)۔
اس وقت، حالانکہ V a کو تلاش کر لیا گیا ہے اور اکومولیٹر کے ساختی پیرامیٹرز کو ڈیزائن کرنے کے لیے استعمال کیا جا سکتا ہے، اکومولیٹر کا ڈیزائن حساب کتاب کا کام ابھی مکمل نہیں ہوا ہے۔ سب سے اہم معاملہ یہ ہے کہ تیل کے دباؤ کو کس طرح کنٹرول کیا جائے تاکہ مساوی قوت حاصل کی جا سکے؛ اور صرف مساوی قوت حاصل کرنے سے ہی ڈیزائن شدہ کائنیمس (حرکیات) کی ضمانت دی جا سکتی ہے، جو اس کے بعد Δ کی ضمانت دیتا ہے۔ V دوسرے الفاظ میں، Δ کے درمیان ایک متناظر تعلق ہے V اور ت جی .
یہ واضح کرنا ضروری ہے کہ جب V a ایک مقررہ قیمت ہو، پی 1, پی 2، اور پی a کے بہت سارے ترکیبیں ممکن ہیں، جو متعدد مساوی قوتوں، متعدد حوالہ جاتی حرکیات (ڈائنامکس) اور متعدد حرکیات (کائنیمس) — یعنی متعدد Δ V کا کام ہے، ایک مقررہ V a کو دیا گیا ہو، تو پی 1, پی 2، اور پی a کی وہ ترکیب تلاش کرنا جو مطلوبہ مساوی قوت ت جی اور Δ V کو حاصل کرنے کے قابل ہو۔ کیونکہ جب پی a تبدیل ہوتا ہے، W H , ت H ، Δ V , پی 1، اور پی 2تمام تبدیلیاں مناسب طریقے سے کی جائیں۔ دوسرے الفاظ میں، ایک چارج پریشر ہونا ضروری ہے پی a جو مساوی دباؤ حاصل کرنے کی ضمانت دے سکے پی جی ۔ بالکل واضح بات یہ ہے کہ مساوی دباؤ کو تلاش کرنے کا بنیادی نقطہ پی a is پی 1اور پی 2، یعنی مساوی دباؤ پی جی ۔ ایک بار جب ان پیرامیٹرز کے درمیان تعلقات سمجھ لیے جاتے ہیں، تو مساوی دباؤ سے پی 1, پی 2، اور پی a کو تلاش کرنے کا طریقہ پی جی کا مطالعہ کیا جا سکتا ہے۔
شکل ۳-۲ اُچچ دباؤ اکومولیٹر کے آپریشن کے دوران اس کے پی –V مندرجہ ذیل ڈایاگرام کو ظاہر کرتی ہے۔ اس ڈایاگرام کی بنیاد پر، اور مساوی قوت کے اصول کو ملانے سے — متغیر قوت کے ذریعہ انجام دیا گیا کام مساوی قوت کے ذریعہ انجام دیے گئے کام کے برابر ہوتا ہے — ہمیں حاصل ہوتا ہے:
پی جی δ V = ∫ V₂ V₁ پی d V (3.19)
مساوات (3.19) میں:
پی = C / V ک
مساوات (3.19) میں تبدیل کرکے اور تکامل کرنے پر:
پی جی δ V = C ∫V₂ V₁ d V / V ک = 1 / (1 − ک ) ( پی 1V ک 1V 1−k 1 − پی 2V ک 2V 1−k 2) (3.20)
لہٰذا:
پی جی δ V = 1 / (1 − ک ) ( پی 1V 1 − پی 2V 2) (3.21)
ختم کرنے V 1اور V 2تعویض کے ذریعے اور مساوات (3.17) کو تبدیل کرنے سے حاصل ہوتا ہے:
پی جی = پی 1\/ ( ک − 1) · ( γ − γ 1/k ) / ( γ 1/k − 1) (3.22)
ترتیب دینے کے بعد:
پی 1 = پی جی (ک − 1) ( γ 1/k − 1) / ( γ − γ 1/k ) (3.23)
مساوات (3.23) میں، پی جی پسٹن کے دباؤ برداشت کرنے والے رُخ پر لگانے والا معادل دباؤ ہے۔ نظام کے دباؤ کے نقصانات کو مدنظر رکھتے ہوئے، اسے نظام کے درجہ بند شدہ دباؤ کے طور پر ظاہر کیا جانا چاہیے پی جی = پی H / ک . کے پی 1اور پی 2اس طرح حاصل کردہ اقدار حقیقی اقدار کے زیادہ قریب ہوں گی۔ اس لیے:
پی 1= ( پی H / ک )(ک − 1) ( γ 1/k − 1) / ( γ − γ 1/k ) (3.24)
پی 2 = γp 1 (3.25)
پی a = aP 1 (3.26)
معادلہ (3.24) میں، نظام کے دباؤ کے نقصانات کو مدنظر رکھنے والے مقاومت کے عدد کو ک = 1.1 سے 1.2 تک لیا جاتا ہے۔
جب ہائیڈرولک راک بریکر کا ہائی پریشر اکیومولیٹر ان پیرامیٹرز پر کام کرتا ہے، تو یہ یقینی بناتا ہے کہ معادل قوت حرکت کا اثر حاصل ہو جاتا ہے، منصوبہ بند کِنیمیٹکس عمل میں آ جاتی ہے، اور مطلوبہ اثری توانائی اور اثری فریکوئنسی فراہم کی جاتی ہے۔ اس طرح ایک پیچیدہ حسابی مسئلہ آسان ہو جاتا ہے اور غیر خطی مسئلہ کو لکیری شکل میں تبدیل کر دیا جاتا ہے۔
اوپر بیان کردہ باتوں کی روشنی میں، ہائیڈرولک اثری آلہ (ہائیڈرولک راک ڈرل اور ہائیڈرولک راک بریکر) — جو ایک غیر خطی نظام ہے — کو ایک لکیری نظام میں تبدیل کر دیا جاتا ہے۔ نظریاتی نقطہ نظر سے، پستون سفر کے دوران س کسی بھی طرح کی حرکت کر سکتا ہے، بشرطیکہ اس کی کنٹرول کی جا سکے اور اثر کے نقطہ پر وہ مطلوبہ زیادہ سے زیادہ رفتار تک پہنچ جائے v م — یہ سب ممکن ہے۔ ہر پسٹن حرکت کے نمونے کے لیے ایک متعلقہ طرزِ قوت کا تغیر ہونا ضروری ہے؛ یہ دونوں باعث اور معلول کے طور پر ایک دوسرے سے منسلک ہیں۔ دوسرے الفاظ میں، جو بھی حرکت کا نمونہ پسٹن کے ساتھ ہو، اُس کے مطابق قوت کے تغیر کا ایک مخصوص نمونہ اُس پر لاگو کیا جانا چاہیے — قوت باعث ہے اور حرکت معلول۔
البتہ، بہترین حرکت کے نمونے کی تجویز کے بعد، اس کے مطابق قوت کے تغیر کا نمونہ بھی تلاش کیا جا سکتا ہے، جس کے نتیجے میں ہائیڈرولک راک بریکر کی تحقیق کے لیے دو نظریاتی موضوعات سامنے آتے ہیں: ہائیڈرولک راک بریکر کی کائنیمیٹکس اور ڈائنامکس۔

ہووو میں خوش آمدید، ایک چینی سیل کارخانہ۔ پی یو، گوم اور پی ٹی ایف ای سیلوں کا تولید۔ سیلوں میں او-رِنگ، پسٹن سیل، رڈ سیل، گرے رِنگ اور گیس سیل شامل ہیں۔



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}