چین، نانجینگ، گولو ضلع، موفو ای روڈ نمبر 33-99 [email protected] | [email protected]
چین، نانجینگ، گولو ضلع، موفو ای روڈ نمبر 33-99 [email protected] | [email protected]

ہائیڈرولک راک بریکر کے ڈیزائن کا مطلب ہے ان ساختی پیرامیٹرز کا حساب لگانا جو ڈیزائن کی خصوصیات میں طے شدہ کارکردگی کی ضروریات کو پورا کریں۔ ان ساختی پیرامیٹرز کے تحت، ہائیڈرولک راک بریکر مطلوبہ اثری توانائی اور اثری فریکوئنسی حاصل کر سکتا ہے۔
یہ بہت زور دے کر کہنا ضروری ہے کہ ہائیڈرولک راک بریکر ایک مقررہ سٹروک کے اندر پسٹن کی آگے پیچھے حرکت کے ذریعے اثری توانائی اور اثری فریکوئنسی پیدا کرتا ہے۔ س سلنڈر باڈی کے اندر۔ اس مقررہ سٹروک پر، پستن ایک مستقل سائیکل میں حرکت کرتا ہے: واپسی کی سٹروک کی تیزی → واپسی کی سٹروک کی آہستگی (بریکنگ) → واپسی کی سٹروک کی رفتار صفر تک گر جاتی ہے → طاقت کی سٹروک کی تیزی → زیادہ سے زیادہ رفتار کے ساتھ امپیکٹ پوائنٹ تک پہنچتا ہے v م → چیسل ٹیل سے ٹکراتا ہے (امپیکٹ توانائی خارج کرتا ہے) → رک جاتا ہے، اور اگلے سائیکل کو شروع کرتا ہے۔ یہ مقررہ سٹروک س پستن سٹروک کہلاتی ہے؛ یہ سلنڈر باڈی کے ابعاد کا تعین کرنے کا ایک اہم بنیادی عنصر ہے۔
پستن سلنڈر باڈی کے اندر آگے پیچھے حرکت کرتا ہے۔ امپیکٹ پوائنٹ سے شروع ہو کر، وہ واپسی کی سٹروک پر تیزی سے حرکت کرتا ہے تاکہ زیادہ سے زیادہ واپسی کی سٹروک کی رفتار حاصل کر سکے v مو ، پھر والو سوئچنگ کی وجہ سے آہستہ ہونا شروع ہوتا ہے؛ رفتار جلدی سے v مو صفر تک — پستون اوپری مر dead سینٹر پر رک جاتا ہے۔ پستون کے ذریعہ طے کردہ سٹروک کو واپسی کا سٹروک کہا جاتا ہے۔ اس وقت، چونکہ والو اب بھی اپنی اصل حالت میں ہے، پستون طاقت کے سٹروک پر تیزی سے شروع ہوتا ہے جب تک کہ وہ اثر کے نقطہ تک نہ پہنچ جائے۔ جب پستون چیسل کے دم سے ٹکراتا ہے، تو اس کی رفتار زیادہ سے زیادہ ہو جاتی ہے — جسے پستون کی زیادہ سے زیادہ اثر رفتار کہا جاتا ہے۔ v م پستون کا وہ سٹروک جو اوپری مر dead سینٹر سے شروع ہو کر چیسل کے دم سے ٹکرانے تک جاتا ہے، طاقت کا سٹروک کہلاتا ہے۔ واضح طور پر، واپسی کا سٹروک اور طاقت کا سٹروک برابر ہونا ضروری ہے۔
ہائیڈرولک راک بریکر کے ڈیزائن کے نظریہ کو مزید گہرائی سے سمجھنے کے لیے، پہلے پستون کی رفتار، مختلف کمرے کے دباؤ، اور آپریشن کے دوران بہاؤ کے تقسیم اور تبدیلی کو سمجھنا مددگار ہوتا ہے۔ ہائیڈرولک راک بریکر کے آپریشن کے دوران کام کرنے والے پیرامیٹرز میں تبدیلیوں کی وجوہات اور ان کی سمت شکل ۲-۴ میں دکھائی گئی ہیں۔ 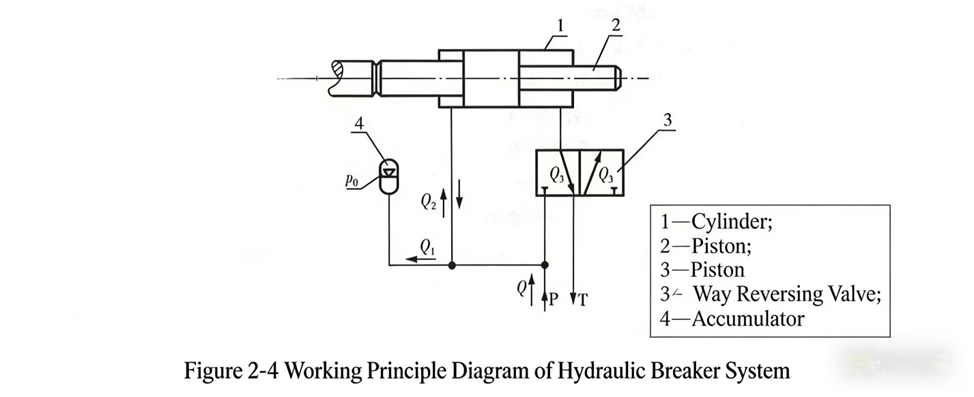
پی 0ایکومولیٹر کا نائٹروجن پری چارج دباؤ ہے؛ Q پمپ کے ذریعہ ہائیڈرولک راک بریکر کو فراہم کردہ بہاؤ ہے؛ Q 1ایکومولیٹر کا داخلی بہاؤ (+) اور خارجی بہاؤ (−) ہے؛ Q 2پسٹن کے سامنے کے کمرے کا داخلی بہاؤ (+) اور خارجی بہاؤ (−) ہے، جس میں Q = Q 1 + Q 2. Q 3پسٹن کے پیچھے کے کمرے کا داخلی بہاؤ (+) اور خارجی بہاؤ (−) ہے؛ پی سیسٹم کا دباؤ ہے۔
شکل ۲-۴ میں پسٹن واپسی کے سٹروک کے آغاز پر دکھایا گیا ہے۔ پمپ کا بہاؤ Q سیسٹم میں داخل ہوتا ہے؛ اس کا ایک حصہ ( Q 2) پسٹن کے سامنے کے کمرے میں داخل ہوتا ہے اور اس کے واپسی کے سٹروک کو حرکت دیتا ہے، جبکہ پیچھے کا کمرہ تیل کو ٹینک میں خارج کرتا ہے ( Q 3)؛ دوسرا حصہ ( Q 1) ایکومولیٹر میں داخل ہوتا ہے اور نائٹروجن کو مکبوئیت دیتا ہے، لہٰذا سیسٹم کا دباؤ پی ایکومولیٹر کے ابتدائی چارج دباؤ سے شروع ہوتا ہے پی 0اور مسلسل بڑھتا جاتا ہے جبکہ Q 1داخل ہوتا ہے۔ ہائیڈرولک راک بریکر کی حرکت، پسٹن کی کارکردگی کی حالت کی بنیاد پر، عام طور پر تین مراحل میں تقسیم کی جا سکتی ہے، جو درج ذیل طریقے سے بیان کی گئی ہیں:
(1) پسٹن واپسی-اسٹروک تیزابی
پسٹن اثر کے نقطہ سے واپسی-اسٹروک شروع کرتا ہے۔ جب پمپ مسلسل سیال داخل کرتا ہے، تو نظام کا دباؤ پی ↑ → پسٹن کی رفتار v ↑ → Q 2↑ → Q 1↓ → Q 3↑، اور تیل ٹینک میں نکالنا جاری رہتا ہے۔ چونکہ پسٹن کی رفتار v ↑ → Q 2↑ → Q 1↓، یہاں تک کہ Q 1= 0 ہو جاتی ہے۔ اس دور کی خصوصیت یہ ہے v ↑ اور پی ↑۔ جب Q 1= 0 ہوتا ہے، ایک موڑ کا نقطہ ظاہر ہوتا ہے: دباؤ پی اب مزید بڑھتا نہیں ہے، لیکن پسٹن کی رفتار مسلسل بڑھتی رہتی ہے (کیونکہ پسٹن کی واپسی کے سفر کے لیے ڈرائیونگ فورس اب بھی موجود ہے)۔ اس موڑ کے نقطہ کے بعد، چونکہ v ↑، پمپ کا بہاؤ Q پسٹن کی حرکت کے لیے بہاؤ کی ضرورت کو پورا نہیں کر سکتا، یعنی Q 2 > Q ۔ پسٹن کے سامنے کے کمرے کی بہاؤ کی ضرورت کو پورا کرنے کے لیے، اب اکومولیٹر کو پمپ کی کمی کو پُر کرنے کے لیے تیل خارج کرنا ہوگا۔ بہاؤ کے توازن کے اصول کے مطابق، Q 2 = Q + Q 1؛ اس وقت Q 1اکومولیٹر سے نکلنے والے اور پسٹن کے سامنے کے کمرے میں داخل ہونے والے بہاؤ کو ظاہر کرتا ہے، یہاں تک کہ v ↑ تک v = v مو ، والو سوئچ ہوتا ہے، اور پسٹن واپسی کے سفر کے دوران تخفیفِ رفتار کے مرحلے میں داخل ہوتا ہے۔
(2) پسٹن کا واپسی کے سفر کے دوران رفتار کم کرنا
واپسی کے سفر کے دوران، چونکہ پسٹن کا سامنے والا کندھا فیڈ بیک سوراخ کو عبور کر چکا ہوتا ہے، اس لیے والو سوئچ ہو جاتا ہے اور پسٹن پر لگنے والی قوت کی سمت الٹ جاتی ہے؛ ڈرائیونگ قوت پسٹن پر الٹی سمت میں لاگو ہوتی ہے، اور پسٹن رفتار کم کرنا شروع کر دیتا ہے یہاں تک کہ v = 0۔ اب واپسی کا سفر مکمل ہو چکا ہے؛ پسٹن اوپری مردہ نقطہ (ٹاپ ڈیڈ سنٹر) تک پہنچ چکا ہے اور مکمل سفر طے کر چکا ہے س ، اور اب طاقت کے سفر (پاور اسٹروک) کے آغاز کے لیے تیار ہے۔
(3) پسٹن کا طاقت کا سفر (پاور اسٹروک)
جب پسٹن کی رفتار v = 0 تک گر جاتی ہے، تو پسٹن پر لگنے والی قوت الٹ جاتی ہے، اس لیے پسٹن کی رفتار بھی الٹ جاتی ہے، جو '+' سے '−' میں تبدیل ہو جاتی ہے۔ پھر پسٹن الٹی قوت کے تحت طاقت کے سفر میں تیزی سے بڑھنا شروع کرتا ہے۔ طاقت کے سفر کے دوران تیزی سے بڑھنے کے آغاز پر، پسٹن کی رفتار v = 0 سے شروع ہوتی ہے، جس وقت پسٹن کا تیل کا استعمال v ہوتا ہے Q 3= 0؛ تمام پمپ ڈسچارج Q ایکومولیٹر میں داخل ہوتا ہے، Q 1 = Q , Q 2= 0۔ جب کہ پاور اسٹروک کی رفتار v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑۔ یہاں یہ بات قابل ذکر ہے کہ سامنے کے کمرے کا رقبہ A 2پیچھے کے کمرے کے رقبے سے چھوٹا ہوتا ہے، A 1، اس لیے بہاؤ کے توازن کے اصول کے مطابق، ضروری طور پر Q 3 = Q 2 + Q − Q 1کی ترقی کے منصوبوں پر بھی بات چیت ہوئی، v ↑ اور Q 1↓، یہاں تک کہ Q 1= 0 ہونا چاہیے۔ اس کا مطلب ہے v ↑؛ اس وقت تمام پمپ ڈسچارج Q پستون کے پیچھے کے کمرے میں مکمل طور پر داخل ہو جاتا ہے، یعنی Q 3 = Q , Q 1= 0، لیکن پستون کی رفتار v ابھی تک زیادہ سے زیادہ رفتار تک نہیں پہنچا ہے v م ۔ پسٹن تیزی سے تیز ہونا جاری رکھتا ہے؛ پمپ کا بہاؤ Q مطالبہ پورا کرنے کے قابل نہیں رہتا، اس لیے اکومولیٹر بہاؤ کو مکمل کرنا شروع کر دیتا ہے، یعنی Q 3 = Q + Q 1(−)، یہاں تک کہ پسٹن زیادہ سے زیادہ رفتار پر چیزل کے دماغ سے ٹکراتا ہے v م ۔ ٹکر کے وقت، پسٹن کی رفتار اچانک v = 0 ہو جاتی ہے، اور پسٹن اثر انرجی کو باہر منتقل کرتا ہے W ، ایک کام کے سائیکل کو مکمل کرتے ہوئے۔
جیسا کہ اکومولیٹر کا داخلہ/خروج بہاؤ Q 1تبدیل ہوتا ہے، نظام کا دباؤ پی بھی مناسب طور پر تبدیل ہوتا ہے۔ جب اکومولیٹر کو چارج کیا جاتا ہے، Q 1= '+', نظامی دباؤ پی ↑؛ جب اکومولیٹر بیرون کی طرف ڈسچارج ہوتا ہے، Q 1= '−', نظامی دباؤ پی ↓۔ دوسرے الفاظ میں، ہائیڈرولک راک بریکر کا کام کرنے کا عمل ہمیشہ نظامی دباؤ میں تبدیلیوں کے ساتھ ہوتا ہے۔ جب اکومولیٹر میں زیادہ سے زیادہ تیل چارج کر دیا جاتا ہے، تو نظامی دباؤ اپنی زیادہ سے زیادہ سطح پر ہوتا ہے۔ جب پستون اِمپیکٹ کے نقطہ تک پہنچ جاتا ہے، تو اکومولیٹر زیادہ سے زیادہ تیل ڈسچارج کر چکا ہوتا ہے — یہ نظامی دباؤ کے سب سے کم ہونے کا لمحہ ہوتا ہے۔ اس لیے، ہائیڈرولک راک بریکر کے شروع ہونے سے لے کر مستقل آپریشن تک پہنچنے تک، اس کا نظامی کام کرنے کا دباؤ پی ہمیشہ زیادہ سے زیادہ دباؤ کے درمیان بار بار گھومتا رہتا ہے پی میکس اور کم سے کم دباؤ پی min ، اور یہ بالکل ناممکن ہے کہ یہ مستقل اور غیر متغیر رہے۔ شکل 2-5 ہائیڈرولک راک بریکر کے آپریشن کے دوران تمام نظامی پیرامیٹرز کی تبدیلی کو ظاہر کرتی ہے۔ 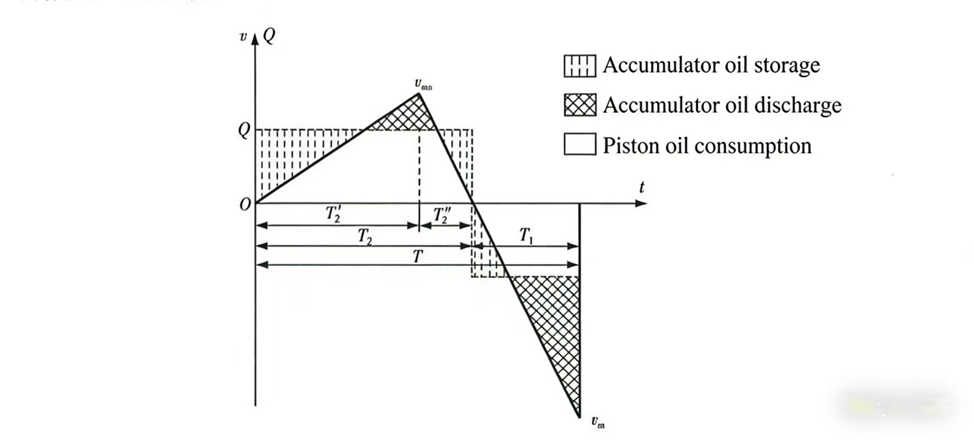
شکل 2-5: ہائیڈرولک راک بریکر کے عمل کے دوران نظامی پیرامیٹرز میں تبدیلی [وضاحت: دھبے دار = اکومولیٹر کا چارج ہونا؛ کراس ہیچڈ = اکومولیٹر کا ڈسچارج ہونا؛ سفید = پسٹن کا تیل کا استعمال]
اوپر بیان کردہ کام کا عمل ظاہر کرتا ہے کہ کام کے پیرامیٹرز میں تبدیلی کافی پیچیدہ ہوتی ہے — یہ ایک غیر خطی نظام ہے۔ اس سے گہرائی سے نظریاتی تجزیہ اور تحقیق کے لیے قابلِ ذکر مشکلات پیدا ہوتی ہیں۔ درحقیقت، یہ ہائیڈرولک راک بریکرز پر نظریاتی تحقیق کے مصنوعاتی ترقی کے پیچھے رہ جانے کی ایک اہم وجوہات میں سے ایک ہے۔
دنیا بھر کے محققین عام طور پر ہائیڈرولک امپیکٹ آلات (ہائیڈرولک راک بریکرز) پر نظریاتی تحقیق کے لیے دو مختلف تکنیکی نقطہ ہائے نظر اپناتے ہیں: لکیری نظامی نظریہ پر مبنی تحقیق اور غیر لکیری نظامی نظریہ پر مبنی تحقیق۔
1) لکیری نظام کے نظریہ پر مبنی تحقیق فرض کرتی ہے کہ پسٹن پر وارد ہونے والی قوت مستقل ہے، پسٹن کی رفتار ایک یکساں شرح سے لکیری طور پر بڑھتی ہے، اور کچھ اثرانداز عوامل کو نظرانداز کر دیا جاتا ہے؛ اس بنیاد پر نظریاتی تحقیق کے لیے ایک لکیری ریاضیاتی ماڈل تشکیل دیا جاتا ہے۔ یہ تحقیقی طریقہ واضح طور پر سادہ ہے اور کچھ عملی مسائل کو حل کر سکتا ہے، لیکن یہ زیادہ درست نہیں ہے اور اس میں قابلِ ذکر غلطیاں موجود ہیں۔
2) غیر لکیری نظام کے نظریہ پر مبنی تحقیق ہائیڈرولک راک بریکر کی حرکت کے نمونوں کو اعلیٰ رتبہ کی غیر لکیری تفاضلی مساواتوں کے ذریعے بیان کرتی ہے، اور ہائیڈرولک راک بریکر کے پسٹن کی حِرکیات اور طاقتیات کو زیادہ درست طور پر ظاہر کرتی ہے۔ یہ غیر لکیری تحقیق لکیری تحقیق کے مقابلے میں زیادہ درست ہے، لیکن پھر بھی یہ کچھ فرضیات پر منحصر ہے۔ اگرچہ یہ ہائیڈرولک اثر کے کچھ جسمانی مظاہر کو زیادہ درست طور پر ظاہر کر سکتی ہے، لیکن اس کا حل نکالنا مشکل ہے، اس کی وضاحت آسان نہیں ہے، اور اسے صرف کمپیوٹر کے ذریعے عددی حل (نیومیریکل سولوشن) کے ذریعے حاصل کیا جا سکتا ہے، جس کی وجہ سے اس کا استعمال کرنا مشکل ہو جاتا ہے۔
ان دو طریقوں کے علاوہ، مصنفین نے سالوں تک لگن سے تحقیق کرنے کے بعد، ہائیڈرولک راک بریکرز کے لیے 'مجرد متغیر ڈیزائن تھیوری' پیش کی ہائیڈرولک راک بریکرز کے لیے مجرد متغیر ڈیزائن تھیوری (ہائیڈرولک امپیکٹ مکینزمز)۔ مجرد متغیر ڈیزائن تھیوری کا استعمال کرتے ہوئے، ہائیڈرولک راک بریکرز کے لیے تحلیلی حل تلاش کیے جا سکتے ہیں، جو ہائیڈرولک راک بریکر کی حرکت کے اندرونی نمونوں کو گہرائی سے ظاہر کر سکتے ہیں اور صارفین کے لیے تکنیکی ایجادات کے لیے ایک نظریاتی بنیاد فراہم کرتے ہیں۔
ہائیڈرولک راک بریکر کے تحقیقاتی طریقہ کار کا خلاصہ متغیر ڈیزائن کا نظریہ: ہائیڈرولک راک بریکر کے کام کرنے والے پیرامیٹرز کی غیر خطی نوعیت کو تسلیم کرتے ہوئے، مساوی قوت کے تبدیلی کے ذریعے غیر خطی نظام کو لکیری شکل میں تبدیل کرنا، تاکہ اسے لکیری نظام کے طریقوں کے ذریعے مطالعہ کیا جا سکے اور تجزیاتی حل حاصل کیے جا سکیں۔ اس طریقہ کار کے ذریعے حاصل کردہ ہائیڈرولک راک بریکرز کے کام کرنے والے اور ساختی پیرامیٹرز کافی درست ہوتے ہیں اور حساب کتاب آسان ہوتا ہے۔ ہائیڈرولک راک بریکر کا خلاصہ متغیر ڈیزائن کا نظریہ آنے والے بابوں میں خصوصی طور پر زیر بحث آئے گا۔

ہووو میں خوش آمدید، ایک چینی سیل کارخانہ۔ پی یو، گوم اور پی ٹی ایف ای سیلوں کا تولید۔ سیلوں میں او-رِنگ، پسٹن سیل، رڈ سیل، گرے رِنگ اور گیس سیل شامل ہیں۔



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}