33-99 No. Mufu E Rd. Distrito de Gulou, Nanjing, China [email protected] | [email protected]
33-99 No. Mufu E Rd. Distrito de Gulou, Nanjing, China [email protected] | [email protected]

La idea de investigación detrás de la teoría del diseño con variables abstractas: independientemente de cómo cambien los parámetros de funcionamiento de un rompedor hidráulico durante su operación, los dos parámetros que cumplen los requisitos de diseño —energía de impacto A H y frecuencia de impacto f H — no deben cambiar; en cuanto al resto de los parámetros, no son particularmente importantes para el diseñador, y mucho menos para el usuario. Sin embargo, el diseñador debe prestar especial atención a la carrera del pistón S , ya que todo comportamiento del pistón ocurre sobre una carrera fija S , y la carrera del pistón S está restringido por la estructura: no puede ser arbitrario. Una carrera demasiado grande no es permitida por la estructura mecánica; una carrera demasiado pequeña no puede satisfacer los requisitos de energía de impacto y frecuencia de impacto. En otras palabras, se trata de una restricción en el funcionamiento del rompedor hidráulico de rocas, y debe existir un valor óptimo.
Cómo abordar el problema del cálculo de diseño de un rompedor hidráulico de rocas —que, en realidad, es un sistema no lineal— mediante métodos lineales constituye el contenido central de este capítulo.
— Base teórica para convertir un sistema no lineal en un sistema lineal
Cuando un rompedor hidráulico de rocas está en funcionamiento, los parámetros de trabajo —como la presión del sistema— p , velocidad del pistón v , la aceleración a , y la carga sobre el pistón — todos cambian de forma no lineal y son funciones del tiempo. Calcular un sistema de este tipo es bastante difícil y complejo. Sin embargo, el objetivo de diseño en este libro es relativamente sencillo: hallar los parámetros estructurales y los parámetros de funcionamiento de un rompedor hidráulico de rocas capaz de suministrar la energía de impacto requerida A H y frecuencia f H . La fórmula de la energía de impacto es:
A H = ( m / 2) v 2m (3.1)
donde: m — masa del pistón, constante;
v m — velocidad instantánea cuando el pistón golpea la cola de la cinceladora, es decir, la velocidad máxima de impacto; esta es la velocidad que debe garantizarse en el diseño.
Existen dos condiciones para asegurar que se alcance la energía de impacto requerida: el pistón debe tener una masa determinada y una velocidad determinada. En un rompedor hidráulico de rocas, la masa del pistón m no puede variar durante el movimiento. Por lo tanto, asegurar que se alcance la energía de impacto significa garantizar que se logre la velocidad máxima de impacto v m .
Debe señalarse que el movimiento del pistón ocurre durante una carrera determinada. En otras palabras, el objetivo del cálculo de diseño de un rompedor hidráulico de rocas es garantizar que, durante una carrera determinada, un pistón de masa fija se acelere con precisión hasta la velocidad máxima de impacto especificada v m dentro del tiempo de ciclo especificado T , golpee la cola de la escopla y libere la energía de impacto especificada A H . Los cambios instantáneos de a , v , y p durante el movimiento no son relevantes para el objetivo del cálculo de diseño y pueden ignorarse. Garantizar el tiempo de ciclo T también garantiza la frecuencia de impacto especificada f H .
Tiempo de ciclo T y frecuencia de impacto f H satisfacer f H = 60 / T , donde T es el tiempo de ciclo de trabajo del pistón (para simplificar el cálculo, se ignora la breve pausa en el punto de impacto).
Si se pudiera encontrar un método de cálculo de diseño sencillo para lograr el objetivo anterior, sería útil para el diseño ingenieril. Como es bien sabido, la presión del aceite hidráulico impulsa el pistón para realizar trabajo; basándose en la ley de conservación de la energía y despreciando otras pérdidas de energía, todo este trabajo se convierte en energía cinética del pistón y se transfiere externamente, lo que da lugar a la siguiente relación:
(m / 2) v 2m = ∫ 0S F (S ) D S (3.2)
Significado físico de la ecuación (3.2): el miembro derecho representa el trabajo realizado por la fuerza variable F (S ) a lo largo de la carrera S ; el miembro izquierdo representa la energía cinética adquirida por el pistón al desplazarse a lo largo de la carrera S .
Para lograr un cálculo linealizado, se puede imaginar una fuerza constante F g que realice el mismo trabajo que la fuerza variable F (S ) a lo largo de la misma carrera S . Por tanto, la fuerza constante F g puede sustituir a la fuerza variable F (S ) en el cálculo linealizado con efecto equivalente, obteniéndose:
(m / 2) v 2m = ∫ 0S F (S ) D S = F g × S (3.3)
Al sustituir la Ec. (3.1) en la Ec. (3.3) se obtiene:
F g = A H / S (3.4)
En la Ec. (3.4), la fuerza constante F g se denomina fuerza equivalente; realiza exactamente el mismo trabajo que la fuerza variable F (S ).
La Ec. (3.4) es la fórmula para calcular la fuerza equivalente. La energía de impacto A H = ( m /2)v 2m está especificada en la tarea de diseño y constituye un parámetro conocido. La carrera S puede obtenerse mediante cálculos cinemáticos y también es conocida; por lo tanto, puede calcularse la fuerza equivalente necesaria para lograr la energía de impacto requerida. La correcta selección de la carrera de diseño S y la frecuencia f H , así como la optimización de la carrera S , se introducirán progresivamente en capítulos posteriores.
Esta fuerza equivalente es muy útil en los cálculos de diseño del rompedor hidráulico de rocas. Basándose en la fuerza equivalente, se puede determinar el área de soporte de presión del pistón —es decir, las dimensiones estructurales del pistón—, definir las condiciones de trabajo y el volumen efectivo del acumulador, y realizar los cálculos cinemáticos y dinámicos del rompedor hidráulico de rocas.
El área de soporte de presión del pistón es:
A = F g / p g (3.5)
En la ecuación (3.5), p g es la presión equivalente del aceite en el sistema, que corresponde al concepto de fuerza equivalente y constituye una variable virtual. Sin embargo, dado que el movimiento del aceite implica resistencia, la presión real de trabajo del aceite en el sistema debe ser mayor que la presión equivalente del aceite; por lo tanto, la presión nominal utilizada en el diseño es:
p H = El g (3.6)
En la ecuación (3.6), K = 1,12 a 1,15 es el coeficiente de resistencia para el funcionamiento del sistema hidráulico. El valor de p H se elige en la práctica según los requisitos generales del sistema que se está diseñando, por lo que el área de la superficie del pistón sometida a presión resulta calculable y conocida. Por lo tanto:
A = KF g / p H (3.7)
Al sustituir la ecuación (3.4) se obtiene:
A = KW H \/ ( p H S ) (3.8)
Debe señalarse que los resultados de cinemática y dinámica calculados a partir de lo anterior no son completamente realistas: se describen como variables linealmente, es decir, el movimiento del pistón se trata como uniformemente acelerado y uniformemente desacelerado. Sin embargo, el tiempo de ciclo del pistón T , la velocidad máxima v m y la carrera de movimiento S son valores reales; para cumplir con los requisitos de diseño, resultan simples, prácticos y precisos.
De hecho, la pregunta más crítica es si la energía de impacto A H , la frecuencia de impacto f H , y caudal ¿Qué es? que acciona la rompedora hidráulica de rocas son reales. Debido a que el área de soporte de presión del pistón A es fija y la carrera S es fija, se deduce necesariamente que el caudal de la bomba ¿Qué es? también es real.
De este modo, aplicar el principio de fuerza equivalente permite simplificar el cálculo de diseño no lineal de la rompedora hidráulica de rocas en uno lineal; tanto los cálculos cinemáticos como los dinámicos pueden simplificarse considerablemente y tratarse como movimientos uniformemente acelerados y uniformemente desacelerados.
La perspectiva académica de la fuerza equivalente consiste en ignorar el proceso complejo, captar la esencia del problema y linealizar el problema no lineal. Sin embargo, los resultados obtenidos son muy reales y fiables, y resultan útiles para profundizar en la comprensión y exploración de los patrones operativos de la rompedora hidráulica de rocas.
Basado en el principio de la fuerza equivalente, la velocidad y las fuerzas del pistón se muestran en la figura 3-1, comprendiendo tres etapas: aceleración en la carrera de retorno, desaceleración en la carrera de retorno (frenado) y carrera de trabajo.
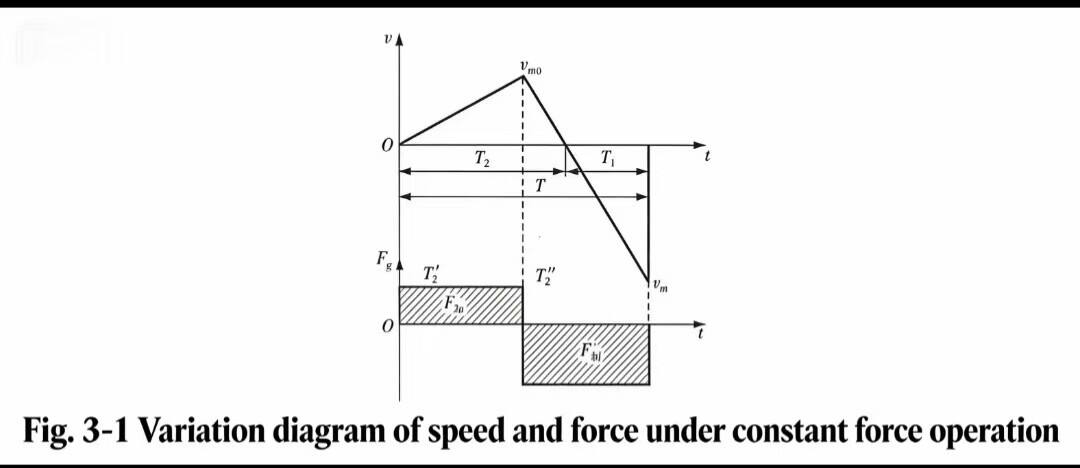
(1) Ecuación dinámica para la etapa de aceleración de la carrera de retorno del pistón
Sea la fuerza motriz de la carrera de retorno F 2g , la velocidad v y la aceleración a definidas como [+]. La fuerza motriz equivalente que acelera el pistón durante la carrera de retorno es:
F 2g = p g A ′2 = el número de 2 (3.9)
donde: a 2= [+] — aceleración del pistón en la carrera de retorno;
A ′2— área efectiva de soporte de presión de la cámara frontal del pistón;
p g — presión equivalente del sistema.
(2) Ecuación dinámica para la etapa de desaceleración de la carrera de retorno del pistón
La fuerza motriz equivalente que desacelera el pistón durante la carrera de retorno es:
F 3g = p g A ′1 = el número de 3 (3.10)
donde: a 3= [−] — desaceleración (frenado) del pistón durante la carrera de retorno.
(3) Ecuación dinámica para la fase de carrera de trabajo del pistón
La fuerza motriz equivalente que acelera el pistón durante la carrera de trabajo es:
F 1G = p g A ′1 = el número de 1 (3.11)
donde: a 1= [−] — aceleración del pistón durante la carrera de trabajo;
A ′1— área efectiva de soporte de presión de la cámara trasera del pistón.
El concepto de área efectiva de soporte de presión varía según los tres principios de funcionamiento diferentes del rompedor hidráulico de rocas descritos anteriormente; se analiza detalladamente en el capítulo de dinámica.

Bienvenido a HOVOO, una fábrica de sellos china. Producción de sellos de PU, goma y PTFE. Los sellos incluyen anillo O, sello de pistón, sello de varilla, anillo Gray y sello de gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}