33-99 רח' מופו, מחוז גולו, ננ징, סין [email protected] | [email protected]
33-99 רח' מופו, מחוז גולו, ננ징, סין [email protected] | [email protected]

הרעיון המחקרי שעומד בבסיס תיאורית העיצוב של משתנים מופשטים: לא משנה איך משתנים פרמטרי הפעולה של שובר סלעים הידראולי במהלך הפעולה, שני הפרמטרים המקיימים את דרישות העיצוב — אנרגיית הפגיעה ו H ותדירות מכה f H — חייבים להישאר קבועים; לעומת זאת, שאר הפרמטרים אינם חשובים במיוחד למ diseñר, ובמיוחד אינם חשובים למשתמש. עם זאת, על המ diseñador להתייחס בקפידה למסלול הפיסטון ס , מכיוון שכל התנהגות של הפיסטון מתרחשת לאורך מסלול קבוע ס , ומסלול הפיסטון ס מוגבל על ידי המבנה — הוא אינו יכול להיות שרירותי. מסלול גדול מדי איננו מותר על ידי המבנה המכני; מסלול קטן מדי אינו מספק את הדרישות לאנרגיית הפגיעה ולתדירות הפגיעה. במילים אחרות, זהו אילוץ על פעולת שובר הסלעים הידראולי, וחייב להיות ערך אופטימלי.
איך להתמודד עם בעיית החישוב העיצובי של שובר סלעים הידראולי — אשר במציאותו הוא מערכת לא ליניארית — באמצעות שיטות ליניאריות מהווה את התוכן המרכזי של הפרק הזה.
— בסיס תיאורטי להמרת מערכת לא ליניארית למערכת ליניארית
בעת פעולתו של שובר הסלעים ההידראולי, פרמטרי הפעולה — כגון לחץ המערכת p , מהירות המבנה v , תאוצה א ומטען המבנה — כולם משתנים באופן לא ליניארי והינם פונקציות של הזמן. חישוב מערכת שכזו הוא מורכב וקשה מאוד. עם זאת, המטרה העיצובית בספר זה יחסית פשוטה: למצוא את פרמטרי המבנה ופרמטרי הפעולה של שובר הסלעים ההידראולי שיאפשרו לספק את אנרגיית ההדף הנדרשת ו H והתדירות f H נוסחת אנרגיית ההדף היא:
ו H = ( מ' / 2) v 2מ' (3.1)
כאשר: מ' — מסת המבנה, קבועה;
v מ' — המהירות הרגעית בעת ההתנגשות של המבנה בזנב החרטום, כלומר מהירות ההדפדה המרבית; זו המהירות שעליה יש להבטיח בבנייה.
קיימות שתי תניות להבטחת האנרגיה הדרושה לפגיעה: הפיסטון חייב להיות בעל מסה מסוימת ומהירות מסוימת. עבור שובר סלעים הידראולי, מסת הפיסטון מ' אינה משתנה במהלך התנועה. לכן, הבטחת האנרגיה הדרושה לפגיעה פירושה הבטחת המהירות המקסימלית לפגיעה v מ' המתקבלת.
יש לציין כי תנועת הפיסטון מתרחשת לאורך מהלך נתון. במילים אחרות, מטרת החישוב העיצובי לשובר סלעים הידראולי היא להבטיח שבמהלך מהלך נתון, יאיץ פיסטון בעל מסה קבועה באופן מדויק למהירות המקסימלית לפגיעה שצוינה v מ' בתוך זמן המחזור שצוין T , יפגע בזנב המברגה ויוציא את אנרגיית הפגיעה שצוינה ו H . השינויים הרגעיים של א , v , ו p במהלך התנועה אינם חשובים למטרת החישוב העיצובי וניתן להתעלם מהם. הבטחת זמן המחזור T מבטיחה גם את תדירות הפגיעה שצוינה f H .
זמן מחזור T ותדירות מכה f H לשבות f H = 60 / T , שם T היא זמן מחזור העבודה של הפיסטון (לצורך פשטות החישוב, מתעלמים מההשהיה הקצרה בנקודת הפגיעה).
אם ניתן יהיה למצוא שיטה פשוטה לחישוב תכנוני שתאפשר להשיג את המטרה לעיל, היא תהיה מועילה לתכנון הנדסי. כידוע, לחץ השמן ההידראולי מפעיל את הפיסטון כדי לבצע עבודה; על סמך חוק שימור האנרגיה ובהזנחת אובדי אנרגיה אחרים, כל העבודה הזו הופכת לאנרגיה קינטית של הפיסטון ויוצאת החוצה, מה שנותן את הקשר הבא:
(מ' / 2) v 2מ' = ∫ 0ס F (ס ) d ס (3.2)
הפירוש הפיזיקלי של משוואה (3.2): הצד הימני הוא העבודה שנעשתה על ידי הכוח המשתנה F (ס ) לאורך המרחק ס ; הצד השמאלי הוא האנרגיה הקינטית שהשיג הפיסטון תוך כדי תנועתו לאורך המרחק ס .
כדי להשיג חישוב ליניארי, אפשר לדמיין כוח קבוע F ג שמבצע את אותה העבודה כמו הכוח המשתנה F (ס ) לאורך אותו מרחק ס . לכן הכוח הקבוע F ג יכול להחליף את הכוח המשתנה F (ס ) בחישוב ליניארי עם השפעה שווה, ונותן:
(מ' / 2) v 2מ' = ∫ 0ס F (ס ) d ס = F ג × ס (3.3)
החלפת משוואה (3.1) במשוואה (3.3) נותנת:
F ג = ו H / ס (3.4)
במשוואה (3.4), הכוח הקבוע F ג נקרא הכוח השקול; הוא מבצע בדיוק את אותה העבודה כמו הכוח המשתנה F (ס ).
המשוואה (3.4) היא הנוסחה לחישוב הכוח השקול. אנרגיית הפגיעה ו H = ( מ' /2)v 2מ' מוגדרת על ידי משימת העיצוב והיא פרמטר ידוע. המרחק של ההנעה (סטROKE) ס ניתן לקבל מחישובים קינמטיים וגם הוא ידוע; לפיכך ניתן לחשב את הכוח השקול הנדרש כדי להשיג את אנרגיית הפגיעה הדרושה. הבחירה הנכונה של מרחק ההנעה בעיצוב ס והתדירות f H , וכן אופטימיזציה של המרחק ס , יُقدמו בהדרגה בפרקים הבאים.
הכוח השקול הזה הוא מועיל מאוד בחישובי תכנון של שובר סלעים הידראולי. על סמך הכוח השקול ניתן למצוא את שטח החתך הסופג את הלחץ בפיסטון — כלומר, את הממדים המבניים של הפיסטון — לקבוע את תנאי ההפעלה והנפח האפקטיבי של המאגר, ולבצע חישובים קינמטיים ודינמיים לשובר הסלעים הידראולי.
שטח החתך הסופג את הלחץ בפיסטון הוא:
א = F ג / p ג (3.5)
במשוואה (3.5), p ג היא הלחץ השקול של השמן במערכת, המתאים למושג הכוח השקול, וזו משתנה וירטואלי. עם זאת, מאחר שהתנועה של השמן כוללת התנגדות, הלחץ האמיתי של השמן במערכת חייב להיות גבוה מהלחץ השקול של השמן, ולכן הלחץ הנקבע לעיצוב הוא:
p H = KP ג (3.6)
במשוואה (3.6), ק = 1.12 עד 1.15 הוא מקדם ההתנגדות להפעלת המערכת ההידראולית. ערכו של p H נבחר בפועל על סמך הדרישות הכוללות של המערכת שמתוכננת, ולכן שטח החתך הנושא הלחץ של הפיסטון הופך לחישובית וידוע. לכן:
א = KF ג / p H (3.7)
הצבת משוואה (3.4) נותנת:
א = קילוואט H \/ ( p H ס ) (3.8)
יש לציין כי תוצאות הקינמטיקה והדינמיקה המחושבות מהמשוואות לעיל אינן ריאליות לחלוטין — הן מתוארות כמשתנות ליניארית, כלומר תנועת הפיסטון מטופלת כתנועה מואצת באופן אחיד ומואטת באופן אחיד. עם זאת, זמן מחזור הפיסטון T , המהירות המקסימלית v מ' , ומסלול התנועה ס הם אמיתיים; לשם עמידה בדרישות העיצוב, הם פשוטים, פרקטיים ומדויקים.
למעשה, השאלה הקריטית ביותר היא האם אנרגיית הפגיעה ו H , תדר הפגיעה f H , והזרימה ק הניעו את שובר הסלעים הידראולי הם אמיתיים. מכיוון ששטח החתך הסופג את הלחץ בפיסטון א קבוע והמהלך ס קבוע, נובע מכך שזרימת המשאבה ק היא בהכרח גם היא ממשית.
בדרך זו, יישום עקרון הכוח השקול יכול לפשט את חישובי העיצוב הלא-ליניאריים של המפרקית ההידראולית לשבירת סלעים להישגים ליניאריים; גם חישובי הקינמטיקה והדינמיקה ניתנים לפישוט משמעותי וניתן לטפל בהם כתנועה מואצת באופן אחיד ומואטת באופן אחיד.
התובנה האקדמית של הכוח השקול היא להתעלם מתהליך המורכב, לתפוס את מהות הבעיה וללינארזовать את הבעיה הלא-ליניארית. עם זאת, התוצאות הנדרשות הן ממשיות ואמינות מאוד, ומסייעות בעמקות הבנת דפוסי הפעולה של המפרקית ההידראולית לשבירת סלעים ובחקירתן.
בהתאם לעקרון הכוח השקול, מהירות המטושק והכוחות הפועלים עליו מוצגים בתרשים 3-1, וכוללים שלושה שלבים: תאוצה של תנועת החזרה, איטום של תנועת החזרה (בלימה) ותהליך העבודה.
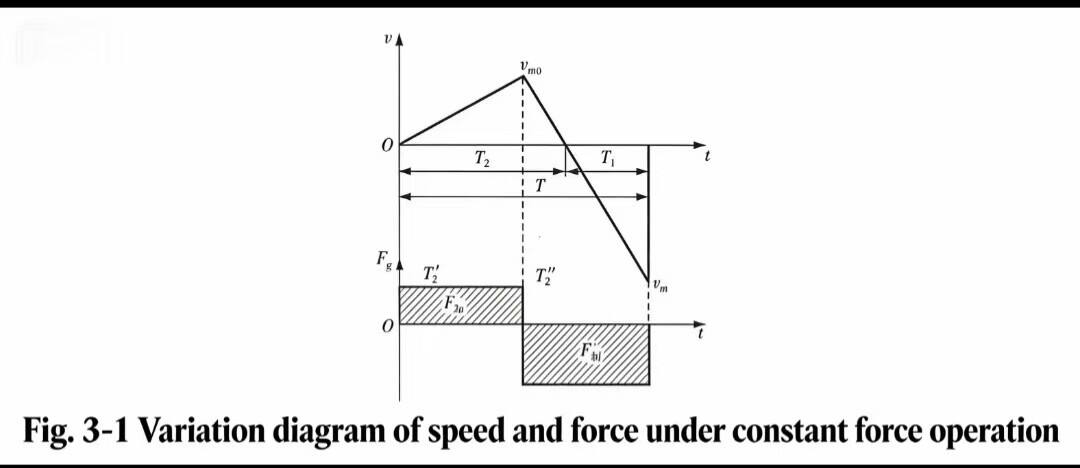
(1) משוואת הדינמיקה לשלב התאוצה בתנועת החזרה של המטושק
נסמן את כוח הפעולה בתנועת החזרה F 2g , המהירות v והתאוצה א כ-[+]. הכוח השקול שמאיץ את המטושק במהלך תנועת החזרה הוא:
F 2g = p ג א ′2 = mA 2 (3.9)
כאשר: א 2= [+] — תאוצת תנועת החזרה של המטושק;
א ′2— שטח החתך האפקטיבי של המרחב הקדמי של המטושק אשר נושא את הלחץ;
p ג — הלחץ השקול של המערכת.
(2) משוואת הדינמיקה לשלב האיטום בתנועת החזרה של המטושק
הכוח המניע השקול שמאט את הפיסטון במהלך המעבר החוזר הוא:
F 3 ג'י. = p ג א ′1 = mA 3 (3.10)
כאשר: א 3= [−] — איטום (בלימה) של הפיסטון במהלך המעבר החוזר.
(3) משוואת הדינמיקה לשלב הפעולה של הפיסטון
הכוח המניע השקול שממהיל את הפיסטון במהלך פעולת הכוח הוא:
F 1G = p ג א ′1 = mA 1 (3.11)
כאשר: א 1= [−] — תאוצה של הפיסטון במהלך פעולת הכוח;
א ′1— שטח החתך האפקטיבי של המתחם האחורי של הפיסטון.
مفهوم שטח החתך האפקטיבי משתנה בהתאם לשלושת עקרונות הפעולה השונים של מפרק הסלע ההידראולי המתוארים לעיל; הוא נדון בפירוט בפרק הדינמיקה.

ברוכים הבאים ל-HOVOO, מפעל חותמות סיני. ייצור של חותמות PU, גומי ו-PTFE. החתימות כוללות O-ring, חתימה של פיסטון, חתימה של ציר, חוגי Gray וחתימה של גז.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}