中国南京市鼓楼区穆府東路33-99番地 [email protected] | [email protected]
中国南京市鼓楼区穆府東路33-99番地 [email protected] | [email protected]

理論上、すべての油圧式ロッカーブレーカーには可変圧力アキュムレータ(特に大容量の高圧アキュムレータ)が必要です。
油圧式ロッカーブレーカーのシステム入口に設置される高圧アキュムレータは、以下の3つの目的を果たします:
(1) システムの供給量と油消費量の過不足を調整すること。ポンプ吐出量がシステムの油消費量より大きい場合、高圧アキュムレータは余剰の吐出量を吸収し、油貯蔵装置として機能する。一方、ポンプ吐出量がシステムの油消費量より小さい場合には、アキュムレータは油を放出して不足分を補い、油放出装置として機能する。高圧アキュムレータは、システム内の流量の過不足を調整する役割を果たし、システムの安定運転にとって重要な構成要素である。
(2) システムの圧力変動を吸収し、微小な圧力スパイクを低減することにより、配管および油圧部品を保護し、その寿命を延長すること。
(3) 抽象変数理論を用いた油圧衝撃機構の設計において、等価力を実現するのに寄与すること。アキュムレータが適切に設計されていれば、正確な等価力を得ることができ、システムが所定の運動学的・力学的特性を達成することを保証する。
高圧アキュムレータは油圧式ロッカーブレーカー・システムにおいて極めて重要な役割を果たしており、特にシステムが所定の運動学的および力学的特性を達成することを保証するという特殊な機能を有している。このため、正確な高圧アキュムレータ設計理論および設計手法を確立することは極めて重要である。
有効排出容量はアキュムレータの重要な性能パラメータであり、同時にアキュムレータ設計計算の基礎でもある。油圧式ロッカーブレーカーが定常状態で運転されるとき、アキュムレータが1サイクル中に貯留し、かつ放出する最大油量を有効排出容量と呼び、Δで表す。 V .
有効排出容量Δ V は運動学的特性に関係している。ポンプ流量が一定であり、油圧式ロッカーブレーカーの構造および運動学的特性が固定されている場合、衝撃エネルギー W H 、衝撃頻度 f H 、および有効排出容量Δ V は必ずしも固定されているわけではありません。したがって、アキュムレータを設計する際には、すでに有効放電容量Δが分かっています。Δの計算方法については、 V 後述の章で紹介します。
アキュムレータの有効容量を算出する基礎となるのは、 V a その実際の有効放電容量Δです。 V δが V アキュムレータ内部で作動すると、必然的にシステム油圧が変化し、等価的な力 F g を維持しなければなりません。したがって、上記の要件を満たすアキュムレータの設計計算方法を検討する必要があります。アキュムレータの運転中の圧力(力)–体積線図を図3-2に示します。
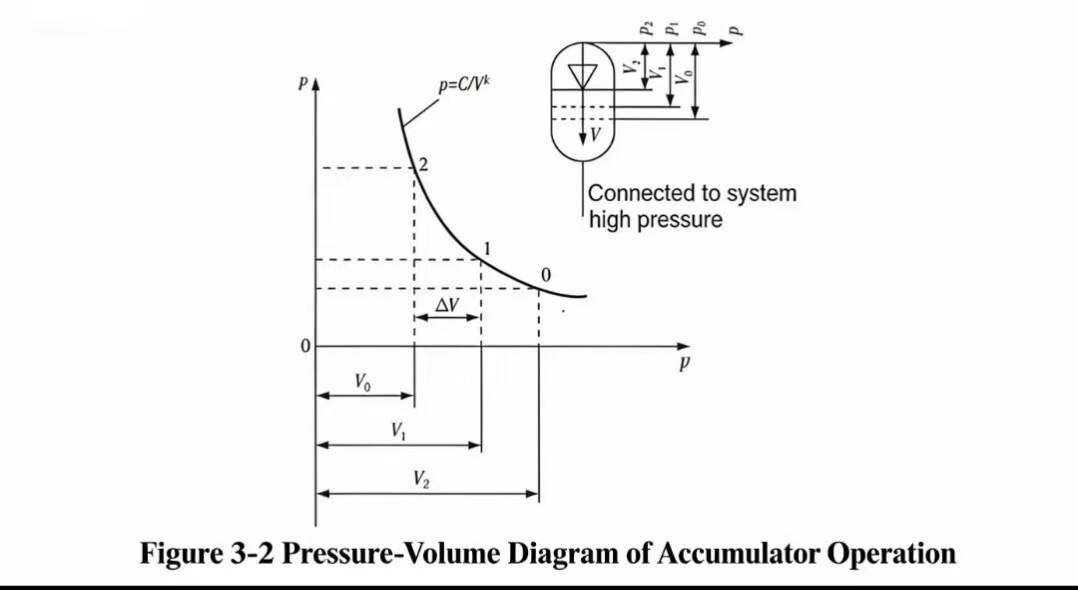
油圧式ロッカーブレーカーの作動周波数はそれほど高くありませんが、その内部における窒素の圧縮および膨張過程は非常に急速であり、周囲との熱交換に十分な時間がなく、断熱過程として扱うことができます。気体の状態方程式より:
p 1V k 1 = p 2V k 2 = p a V k a (3.12)
ただし: p a — 充填圧力(すなわち、密閉されたガスの圧力)
V a — 充填容積(すなわち、ピストンが衝突点にあるときのアキュムレータ容積。一般に最大作動容積) V amax );
p 2— 最大作動圧力
V 2— に対応する容積 p 2(一般に最小作動容積) V 2分 );
p 1— 最小作動圧力
V 1— に対応する容積 p 1, V 1 < V a .
式(3.12)において、 k =1.4は断熱指数である。明らかに:
δ V = V 1 − V 2 (3.13)
式(3.12)より:
V 1 = V a (p a / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
式(3.13)に代入すると、次のようになる:
δ V = V a (p a / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
式(3.16)において、 p a / p 1 = a =0.8~1とし、ガスの作動圧力比 γ = p 2 / p 1は通常 γ =1.2~1.45と選定する。これは油圧ロッカーブレーカーの作動特性に基づいて決定される。また、 a =1のとき、ピストンの最小作動圧力は充填圧力( p a = p 1)に等しくなる;この状態では V 1 = V a 。油圧ロッカーブレーカーの最小作動圧力時にアキュムレータ膜が底部に接触することを防ぐため——これは寿命を短縮させる—— a 1未満に設定する必要があります。
選択に当たって考慮すべき点が2つあります。 γ : γ が大きい場合、アキュムレータが断熱状態で動作するため、温度が急激に上昇し、アキュムレータ膜の早期劣化や、最悪の場合の焼損を引き起こす可能性があります。しかし、 γ を増加させることで、アキュムレータの有効容積 V a を効果的に低減でき、これはアキュムレータの構造サイズを縮小する上で非常に有益です。設計者は、これらの長所と短所を慎重に検討し、適用条件に基づいて判断しなければなりません。したがって:
δ V = V a a 1/K (1 − 1/ γ 1/K ) (式3.17)
式(3.17)より、アキュムレータの有効容積を求めることができます:
V a = Δ Vγ 1/K / [ a 1/K (γ 1/K − 1)] (3.18)
計算する 効果的な放出体積 Δから V 設計された運動とΔの V 達成される. 実行では,有効放出体積 Δ V 蓄電器が電源流中にピストンに補給する油で,ポンプの供給不足を補う.
設計上の計算のために,有効放出体積 Δ V 参照してください 7.5. 設計の目的のために,効率的な放出量の計算 Δ V 選択された α u (第7.2.5節および第7.27a節を参照)。
この時点で、 V a が求まり、蓄圧器の構造パラメータ設計に使用可能となったが、蓄圧器の設計計算作業はまだ完了していない。最も重要な課題は、油圧をどのように制御して等価力を実現するかであり、等価力が実現されて初めて設計された運動学的特性が保証され、その結果としてΔ V が保証されるということである。言い換えると、Δ V および F g .
ここで明記しておく必要があるのは、 V a が固定値である場合、 p 1, p 2、および p a には多くの組み合わせが存在し、複数の等価力、複数の動力学的特性、および複数の運動学的特性——すなわち複数のΔ V 値——を実現できることである。次の課題は、固定された V a に対して、 p 1, p 2、および p a 所定の等価力が得られるもの F g およびΔ V 。なぜなら、 p a が変化すると、 W H , f H 、Δ V , p 1、および p 2もすべてそれに応じて変化するからである。言い換えれば、等価圧力を確実に達成できるチャージ圧力 p a が存在しなければならない。 p g 、すなわち等価圧力 p a is p 1および p 2を求める根拠となる。 p g これらのパラメータ間の関係が理解されれば、 p 1, p 2、および p a 等価圧力から p g 検討することができる。
図3-2は、運転中の高圧アキュムレータの p –V 構造図を示している。この図に基づき、等価力の原理(変動する力がなす仕事と等価力がなす仕事とは等しい)を組み合わせると、以下の式が得られる:
p g δ V =∫ V₂ V₁ p d V (3.19)
式(3.19)において:
p = C / V k
これを式(3.19)に代入し、積分すると:
p g δ V = C ∫V₂ V₁ d V / V k = 1 / (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
したがって:
p g δ V = 1 / (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
排除する V 1および V 2代入を行い、式(3.17)を代入すると:
p g = p 1/( k − 1) · ( γ − γ 1/K ) / ( γ 1/K − 1) (3.22)
並べ替えた後:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K )(3.23)
式(3.23)において、 p g はピストンの圧力受圧面に作用する等価圧力である。システム内の圧力損失を考慮すると、これはシステムの定格圧力として表すべきである。 p g = p H / K 。この p 1および p 2このようにして得られた値は、実際の値により近くなる。したがって:
p 1=( p H / K )(k − 1)( γ 1/K − 1) / ( γ − γ 1/K )(3.24)
p 2 = γp 1 (3.25)
p a = アップ 1 (3.26)
式(3.24)において、システムの圧力損失を考慮した抵抗係数は K =1.1~1.2である。
油圧式ロッカーブレーカーの高圧アキュムレータがこれらのパラメータで動作する場合、等価な打撃力の運動効果が得られ、設計された運動学的特性が実現され、所定の衝撃エネルギーおよび衝撃周波数が供給されることを保証します。このようにして、複雑な計算問題が簡略化され、非線形問題が線形化されます。
以上の点に基づき、油圧式衝撃装置(油圧式ロッカー・ドリルおよび油圧式ロッカーブレーカー)——すなわち非線形システム——は線形システムに変換されます。理論的には、ピストンはストロークに沿って任意のパターンで移動することが可能です。 S ただし、その動きは制御可能であり、かつ衝撃点において所定の最大速度に達することを条件とします v m — これらすべては実現可能です。あらゆるピストンの運動パターンには、対応する力の変動パターンが必ず存在し、両者は原因と結果の関係にあります。言い換えれば、ピストンがどのような運動パターンをとるとしても、それに応じた力の変動パターンを必ず適用しなければなりません。すなわち、力が原因であり、運動が結果です。
もちろん、最適な運動パターンを設計した後には、それに対応する力の変動パターンも同様に求めることができます。これにより、油圧ロッカーブレーカーの研究において、以下の2つの理論的課題が提起されます。すなわち、油圧ロッカーブレーカーの運動学および力学です。

HOVOOにようこそ、中国のシール工場です。PU、ゴム、PTFEシールの製造を行っています。シールにはOリング、ピストンシール、ロッドシール、グレーリング、ガスシールが含まれます。



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}