33-99 No. Via Mufu E. Districte Gulou, Nanjing, Sinus [email protected] | [email protected]
33-99 No. Via Mufu E. Districte Gulou, Nanjing, Sinus [email protected] | [email protected]

Idea investigativa subiacens theoriae designis variabilium abstractarum: quocumque modo parametri operationis frangendae petrae hydraulicae mutantur dum operatur, duo parametri qui requisita designis implent — energia ictus W H et frequēntia impāctūs f H — immutati manere debent; ceteri autem parametri ad designatorem non sunt praesertim magni momenti, nec ad usorem praesertim. Designator tamen speciale oculum ad cursus pistoni conferre debet S , quia omnis actio pistoni in cursu certo fit S , et cursus pistoni S coarctatur a structura — non potest esse arbitraria. Magnitudo nimis magna ictus non permittitur a structura mechanica; magnitudo nimis parva ictus non satisfacit requisita pro energia ictus et frequentia ictus. Alioquin, est haec coarctatio in operatione frangentis petrarum hydraulici, et debet esse valor optimus.
Quomodo tractare problemata calculi designii frangentis petrarum hydraulici — quod re vera est systema non lineare — per methodos lineares est contentum principale huius capitis.
— Fundamentum Theoreticum ad Systema Non Lineare Convertendum in Systema Lineare
Cum frangens petrarum hydraulica operatur, parametri operationis — ut pressio systematis p , velocitas pistoni v , accelerātiō a , et onus pistons — omnia mutatur non lineariter et sunt functiones temporis. Calculare tale systema est valde difficile et complexum. Sed finis designandi in hoc libro est relativus simplicissimus: invenire parametres structurales et parametres operationis frangentis petrarum hydraulici, qui impetum energiam requiritam praebere possint W H et frequentia f H . Formula energiae impetus est:
W H = ( m / 2) v 2m (3.1)
ubi: m — massa pistōnis, constāns;
v m — velocitas instans cum piston percussit caudam scalprae, id est maxima velocitas impetus; haec est velocitas quae in designo garantiri debet.
Duae sunt conditiones ad energiam impetus requiritam consequendam: piston debet habere certam massam et certam velocitatem. In frangente petrarum hydraulico, massa pistons m non potest mutari dum movetur. Ergo, ad energiam impetus requiritam consequendam, maxima velocitas impetus v m attingenda est.
Monendum est motum pistōnis fierī per datam cursūs longitūdinem. Aliōs verbīs, cōnstitūtiō calculī dēsignī frāctōris petrae hydraūlicī hanc in rēm spectat, ut per datam cursūs longitūdinem pistōnem massae fixae accurate accelerētur ad praescriptam maximam impāctūs vēlōcitātem v m in praescriptō tempore cyclī T , quī ferrum caedendī feriat et praescriptam impāctūs energiam efficiat W H . Instantāneae mutātiōnēs a , v , et p dūrānte motū non sunt ad obiectīvum calculī dēsignī necessariae et praetermittī possunt. Servāre tempus cyclī T servat etiam praescriptam frequēntiam impāctūs f H .
Exolvuntur tempore T et frequēntia impāctūs f H complacere f H = 60 / T , ubi T est tempus cyclī operātōriī pistōnis (ad simplicitātem calculī brevis quies ad punctum impāctūs praetermittitur).
Si methodus simplicis calculationis designis inveniri posset, quae praedictum finem consequeretur, haec ad usum designis technici esset. Ut notum est, pressio olei hydraulici pistoni impellit ut opus faciat; ex lege conservationis energiae, et aliis amissis energiis neglectis, totum hoc opus in energiam cineticam pistonis convertitur et extra effunditur, quae sequentem relationem dat:
(m / 2) v 2m = ∫ 0S F (S ) D S (3.2)
Significatio physica aequationis (3.2): latus dextrum est opus a vi variabili facto F (S ) per cursus longitudinem S ; latus sinistrum est energia cinetica a pistone acquisita dum per cursus longitudinem movetur S .
Ad calculationem linearis effectuendam, potest fingi vis constans F g quae idem opus facit atque vis variabilis F (S ) per eundem cursus longitudinem S . Ergo vis constans F g vice vis variabilis substitui potest F (S ) in calculo linearizato cum aequo effectu, dantes:
(m / 2) v 2m = ∫ 0S F (S ) D S = F g × S (3.3)
Substitutio Aequationis (3.1) in Aequationem (3.3) dat:
F g = W H / S (3.4)
In Aequatione (3.4), vis constans F g dicitur vis aequivalens; ea exacte idem opus facit atque vis variabilis F (S ).
Aequatio (3.4) est formula ad calculandam vim aequivalentem. Energia ictus W H = ( m /2)v 2m specificatur ab officio designandi et est parameter cognitus. Cursor S ex calculis kineticis obtineri potest et etiam cognitus est; ideo vis aequivalens necessaria ad consequendam energiam ictus desideratam calculare potest. Recta electio cursoris designati S et frequentia f H , simul cum optimisatione cursoris S , gradatim in capitulis posterioribus introducetur.
Haec vis aequivalens valde utilis est in calculationibus ad designandum frangitorem petrae hydraulicum. Ex hac vi aequivalente determinari potest area pressionem sustinens pistoni — id est, dimensiones structurales pistoni — condicionum operativarum et voluminis efficacis accumulantis definitio, necnon calculationes cinematicae et dynamicorum frangitoris petrae hydraulici fieri possunt.
Area pressionem sustinens pistoni est:
A = F g / p g (3.5)
In Aequatione (3.5), p g est pressio olei aequivalens systematis, quae respondet conceptui vis aequivalentis, et est variabilis virtualis. Tamen, cum motus olei resistentiam involvat, pressio olei realis systematis operativi maior esse debet quam pressio olei aequivalens; ideo pressio nominalis in designo usurpata est:
p H = KP g (3.6)
In Aequatione (3.6), K = 1,12 ad 1,15 est coefficiens resistentiae pro operatione systematis hydraulici. Valor p H in praxi eligitur ex totis requisitis systematis designandi, ita ut area pressionem sustinens pistoni calculabilis et nota fiat. Ergo:
A = KF g / p H (3.7)
Substitutio aequationis (3.4) dat:
A = Kw H \/ ( p H S ) (3.8)
Cavendum est ut resultata cinematica et dynamica ex supra calculata non sint omnino realia — describuntur enim ut lineariter variantia, id est motus pistoni ut uniformiter acceleratus et uniformiter deceleratus tractatur. Tamen tempus cycli pistoni T , maxima velocitas v m , et cursus motus S sunt reales; ad implenda requisita designi, sunt simplicia, practica et accurata.
Re vera quaestio maxime critica est num energia impactus W H , frequēntia impāctūs f H , et fluxus Q quae frāctōrem hydraulicum rūpium movēnt reālia sunt. Quia superficiēs pistōnis quae prēssionem sustinet A fixa est et cursus S fixus est, sequitur ut fluxus pumpae Q necesse est etiam reālis esse.
Hoc modō, applicātiō principiī aequivalentis fortitūdinis calculōnem dēsignī nonlinearis frāctōris hydraulici rūpium in calculum līneārem simplificāre potest; et calculī tam kinēmaticī quam dynamicī magnopere simplificārī possunt atque ut motūs uniformiter accelerātī et uniformiter decelerātī tractārī.
Perspicācia acadēmica fortitūdinis aequivalentis est ut processus complexus praetermittatur, essentia quaestionis capiatur, et problema non līneāre in līneāre convertatur. Sed rēsultāta quae requiruntur valdē reālia et fīdēlia sunt, ac ad profundiōrem intellectum et explorātiōnem pattērnōrum operātiōnis frāctōris hydraulici rūpium conferre possunt.
Secundum principium aequivalentis virium, velocitas et vires pistoni sunt ut in Fig. 3-1 ostenditur, constans tribus statibus: acceleratione cursus reditus, retardatione cursus reditus (frenatione) et cursu impellente.
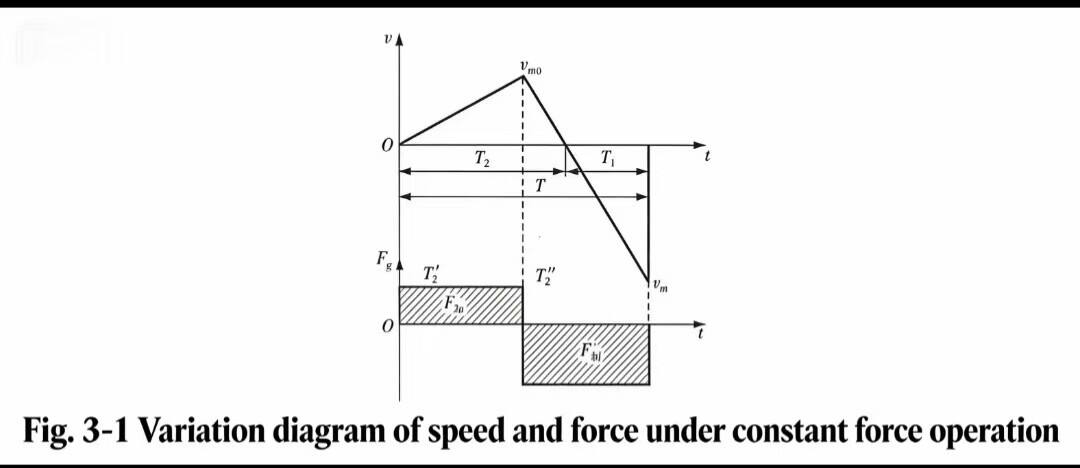
(1) Aequatio dynamica pro statu accelerationis cursus reditus pistoni
Sit vis impellens cursus reditus F 2g , velocitas v , et acceleratio a definiantur ut [+]. Vis aequivalens impellens quae pistonem in cursu reditus accelerat est:
F 2g = p g A ′2 = ma 2 (3.9)
ubi: a 2= [+] — acceleratio cursus reditus pistoni;
A ′2— area efficiens pressionem sustinens camerae anterioris pistoni;
p g — pressio aequivalens systematis.
(2) Aequatio dynamica pro statu retardationis cursus reditus pistoni
Vis aequivalens quae pistorem in cursu retractionis decelerat est:
F 3G = p g A ′1 = ma 3 (3.10)
ubi: a 3= [−] — deceleratio (frenatio) pistonis in cursu retractionis.
(3) Aequatio dynamica pro statu cursus potentiae pistonis
Vis aequivalens quae pistorem in cursu potentiae accelerat est:
F 1g = p g A ′1 = ma 1 (3.11)
ubi: a 1= [−] — acceleratio pistonis in cursu potentiae;
A ′1— area efficiens pressionem sustinens camerae posterioris pistonis.
Conceptus areae efficiens pressionem sustinens variat secundum tres diversos principios operativi frangentis petrae hydraulici supra descriptos; hoc capite de dynamica fusius tractatur.

Salve in HOVOO, fabbrica sigilli Sinensis. Productio sigillorum PU, Rubber et PTFE. Sigilla comprehendunt circulum o, sigillum pistilli, sigillum virgae, circulum Gray et sigillum gas.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}