33-99No. Mufu E Rd. Gulou District, Nanjing, China [email protected] | [email protected]
33-99No. Mufu E Rd. Gulou District, Nanjing, China [email protected] | [email protected]

Het ontwerp van een hydraulische rotsslaghamer betekent het berekenen van de structurele parameters die voldoen aan de prestatievereisten zoals vastgelegd in de ontwerpspecificatie. Onder deze structurele parameters kan de hydraulische rotsslaghamer de vereiste slagenergie en slagfrequentie bereiken.
Er moet nadrukkelijk worden benadrukt dat de hydraulische rotsslaghamer slagenergie en slagfrequentie levert via de heen-en-weer beweging van de zuiger binnen een vaste slag S binnen het cilinderlichaam. Gedurende deze vaste slag beweegt de zuiger in een continue cyclus: terugslagversnelling → terugslagvertraging (remming) → terugslagsnelheid daalt tot nul → werkslagversnelling → bereikt het slagpunt met maximale snelheid v m → raakt de beitelstaart (geeft slagenergie af) → stopt en begint de volgende cyclus. Deze vaste slag S wordt de zuigerslag genoemd; het is een belangrijke basis voor het bepalen van de afmetingen van het cilinderlichaam.
De zuiger beweegt heen en weer binnen het cilinderlichaam. Vanaf het slagpunt versnelt hij tijdens de terugslag om de maximale terugslagsnelheid te bereiken v mo , waarna hij door klepomkering begint te vertragen; de snelheid daalt snel van v mo naar nul — de zuiger stopt op het bovenste doodpunt. De slag die de zuiger aflegt, wordt de terugslag genoemd. Op dit moment begint de zuiger, omdat de klep nog steeds in zijn oorspronkelijke stand is, te versnellen tijdens de arbeidsslag totdat hij het impactpunt bereikt. Wanneer de zuiger de beitelstaart raakt, heeft zijn snelheid het maximum bereikt — dit wordt de maximale impact-snelheid van de zuiger genoemd v m . De slag die de zuiger aflegt vanaf het bovenste doodpunt tot het raken van de beitelstaart, wordt de arbeidsslag genoemd. Duidelijk is dat de terugslag en de arbeidsslag gelijk moeten zijn.
Om de ontwerptheorie van hydraulische rotsonderbrekers dieper te bestuderen, is het nuttig om eerst de zuigersnelheid, de diverse kamerdrukken en de stromingsverdeling en -variatie tijdens bedrijf te begrijpen. De oorzaken van en de richting van veranderingen in de werkparameters van een hydraulische rotsonderbreker tijdens bedrijf zijn weergegeven in figuur 2-4. 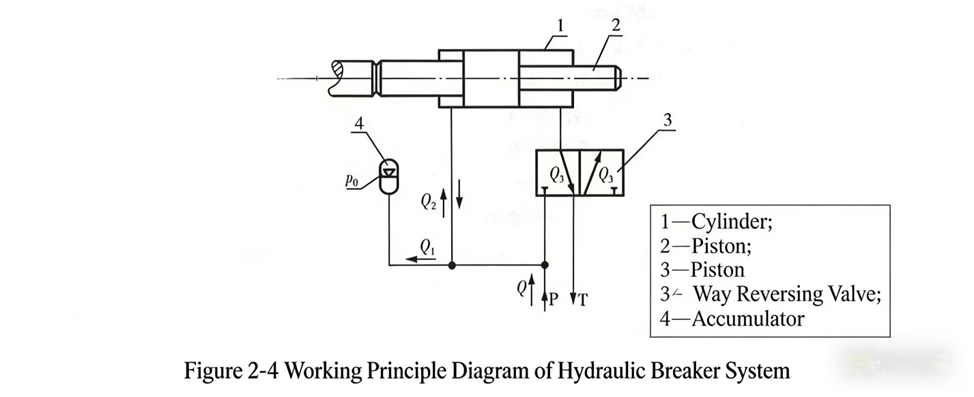
p 0is de stikstofvoorladdruk van de accumulator; Q is de door de pomp aan de hydraulische rotsonderbreker geleverde stroom; Q 1is de opslagvat-toevoerstroom (+) en -afvoerstroom (−); Q 2is de toevoerstroom (+) en afvoerstroom (−) van de voorzijde van de zuigerkamer, met Q = Q 1 + Q 2. Q 3is de toevoerstroom (+) en afvoerstroom (−) van de achterzijde van de zuigerkamer; p is de systeemdruk.
Figuur 2-4 toont de zuiger aan het begin van de terugloop. De pompstroom Q vloeit het systeem in; een deel ( Q 2) stroomt de voorzijde van de zuigerkamer in en drijft de terugloop, terwijl de achterzijde van de zuigerkamer olie naar de tank afvoert ( Q 3); het andere deel ( Q 1) stroomt het opslagvat in en comprimeert de stikstof, zodat de systeemdruk p begint bij de voorladdruk van het opslagvat p 0en stijgt voortdurend naarmate Q 1stroomt in. De beweging van de hydraulische rotswalser, gebaseerd op de werkingstoestand van de zuiger, kan in het algemeen worden onderverdeeld in drie fasen, zoals hieronder beschreven:
(1) Terugslagversnelling van de zuiger
De zuiger begint de terugslag vanaf het slagpunt. Naarmate de pomp continu stroom injecteert, stijgt de systeemdruk p ↑ → zuigersnelheid v ↑ → Q 2↑ → Q 1↓ → Q 3↑, en olie blijft naar de tank worden afgevoerd. Omdat de zuigersnelheid v ↑ → Q 2↑ → Q 1↓, totdat Q 1= 0. Het kenmerk van deze periode is v ↑ en p ↑. Wanneer Q 1= 0, verschijnt een keerpunt: de druk p stijgt niet langer meer, maar de zuigersnelheid blijft toenemen (omdat de aandrijfkracht voor de terugslag van de zuiger nog steeds aanwezig is). Na dit keerpunt, omdat v ↑, kan de pompdebiet Q de debietbehoefte voor de zuigerbeweging niet langer voldoen, d.w.z. Q 2 > Q . Om aan de debietbehoefte van de voorkamer van de zuiger te voldoen, moet de accumulator nu olie lossen om het tekort van de pomp aan te vullen. Op basis van het debalansprincipe: Q 2 = Q + Q 1; op dit moment Q 1is de stroming die uit de accumulator stroomt en in de voorkamer van de zuiger binnenkomt, totdat v ↑ tot v = v mo , schakelt de klep en treedt de zuiger de vertragingfase van de terugslag binnen.
(2) Vertraging van de terugslag van de zuiger
Tijdens de terugslag is, omdat de voorste schouder van de zuiger het terugkoppelgat heeft gepasseerd, de klep geschakeld en is de krachtrichting op de zuiger omgekeerd; de aandrijfkracht wordt in omgekeerde richting op de zuiger uitgeoefend en de zuiger begint te vertragen totdat v = 0. De terugslag is nu voltooid; de zuiger heeft het bovenste doodpunt bereikt en de volledige slag afgelegd S , klaar voor de arbeidsslag om te beginnen.
(3) Arbeidsslag van de zuiger
Wanneer de zuigersnelheid daalt tot v = 0, keert de kracht op de zuiger van richting, zodat ook de zuigersnelheid v van richting verandert, van '+' naar '−'. De zuiger begint vervolgens te versnellen tijdens de arbeidsslag onder invloed van de omgekeerde kracht. Bij aanvang van de versnelling tijdens de arbeidsslag begint de zuigersnelheid bij v = 0, op dat moment is het olieverbruik van de zuiger Q 3= 0; de volledige pompafvoer Q stroomt naar de accumulator, Q 1 = Q , Q 2= 0. Naarmate de krachtslag-snelheid v ↑ → Q 3↑ → Q 1↓ → Q 2(−)↑. Op dit punt dient te worden opgemerkt dat, omdat het oppervlak van de voorste kamer Een 2kleiner is dan het oppervlak van de achterste kamer Een 1, er op grond van het stromingsbalansprincipe noodzakelijkerwijs moet zijn Q 3 = Q 2 + Q − Q 1, met v ↑ en Q 1↓, totdat Q 1= 0. Dit betekent v ↑; op dit moment wordt de volledige pompafvoer Q volledig in de achterkamer van de zuiger geïnjecteerd, d.w.z. Q 3 = Q , Q 1= 0, maar de zuigersnelheid v heeft nog niet de maximale snelheid bereikt v m . De zuiger blijft versnellen; de pompdebiet Q kan de vraag niet langer volledig dekken, dus begint de accumulator het debiet aan te vullen, d.w.z. Q 3 = Q + Q 1(−), totdat de zuiger met maximale snelheid op de boorstaart botst v m . Op het moment van impact wordt de zuigersnelheid plotseling v = 0, en de zuiger levert impactenergie W naar buiten, waarmee één werkcyclus is voltooid.
Naarmate het inlaat-/uitlaatdebiet van de accumulator Q 1verandert, verandert ook de systeemdruk p diens. Bij het laden van de accumulator, Q 1= '+', systeemdruk p ↑; wanneer de accumulator olie naar buiten afvoert, Q 1= '−', systeemdruk p ↓. Met andere woorden, het werkproces van een hydraulische rotsbreekhamer gaat altijd gepaard met veranderingen in de systeemdruk. Wanneer de accumulator volledig is gevuld met olie, bevindt de systeemdruk zich op zijn hoogste niveau. Wanneer de zuiger het slagpunt bereikt heeft, heeft de accumulator de meeste olie afgevoerd — dit is het moment van laagste systeemdruk. Daarom varieert de werkende systeemdruk van de hydraulische rotsbreekhamer, vanaf het moment dat deze wordt gestart tot het bereiken van stationaire werking, p altijd cyclisch tussen een maximale druk p maximaal en een minimale druk p min. , en het is absoluut onmogelijk dat deze constant en onveranderlijk zou zijn. Fig. 2-5 toont de variatie van alle systeemparameters tijdens de werking van de hydraulische rotsbreekhamer. 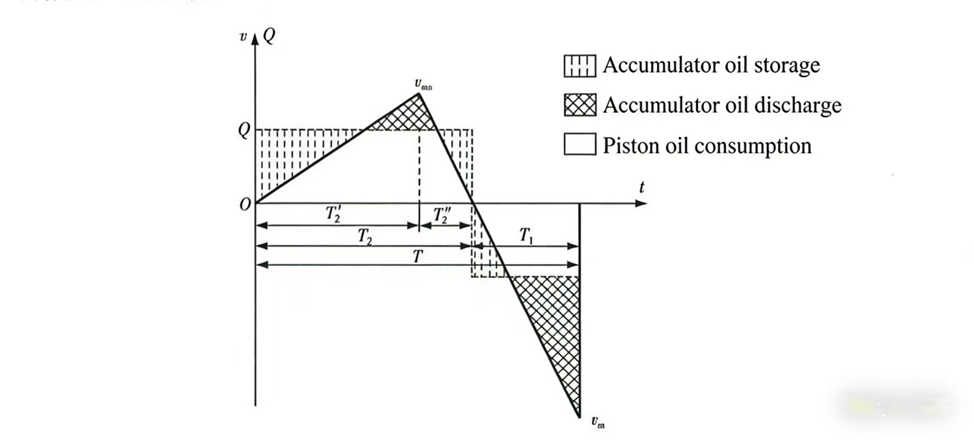
Fig. 2-5 Variatie van systeemparameters tijdens de werking van een hydraulische rotsbreekmachine [Legenda: gestreept = opladen van de accumulator; schuin gestreept = ontladen van de accumulator; wit = olieverbruik van de zuiger]
Het bovengenoemde werkproces laat zien dat de variatie in werkparameters vrij complex is — het betreft een niet-lineair systeem. Dit veroorzaakt aanzienlijke moeilijkheden voor diepgaande theoretische analyse en onderzoek. In feite is dit een van de belangrijkste redenen waarom het theoretisch onderzoek naar hydraulische rotsbreekmachines achterloopt op de productontwikkeling.
Onderzoekers wereldwijd hebben over het algemeen twee verschillende technische benaderingen gevolgd voor theoretisch onderzoek naar hydraulische slagapparaten (hydraulische rotsbreekmachines): onderzoek op basis van lineaire systeemtheorie en onderzoek op basis van niet-lineaire systeemtheorie.
1) Onderzoek gebaseerd op de theorie van lineaire systemen veronderstelt dat de kracht op de zuiger constant is, dat de zuigersnelheid lineair toeneemt met een uniforme snelheid en dat bepaalde invloedsfactoren worden genegeerd; op deze basis wordt een lineair wiskundig model opgesteld voor theoretisch onderzoek. Deze onderzoeksmethode is duidelijk eenvoudig en kan enkele praktische problemen oplossen, maar is niet erg nauwkeurig en vertoont aanzienlijke fouten.
2) Onderzoek gebaseerd op de theorie van niet-lineaire systemen maakt gebruik van differentiaalvergelijkingen van hogere orde en niet-lineair karakter om de bewegingspatronen van de hydraulische rotshamer te beschrijven, en geeft daarmee een nauwkeuriger weergave van de kinematica en dynamica van de zuiger van de hydraulische rotshamer. Dit niet-lineaire onderzoek is nauwkeuriger dan lineair onderzoek, maar steunt nog steeds op bepaalde aannames. Hoewel het sommige fysische verschijnselen van hydraulische impact nauwkeuriger kan onthullen, is het moeilijk op te lossen, niet eenvoudig te interpreteren en levert het uitsluitend numerieke oplossingen via computerberekeningen op, wat het onhandig maakt in gebruik.
Naast deze twee benaderingen stelden de auteurs, na vele jaren toegewijde onderzoek, de Theorie van het Abstracte Variabele Ontwerp voor hydraulische rotshakkers (hydraulische slagmechanismen). Met behulp van de theorie van het abstracte variabele ontwerp kunnen analytische oplossingen voor hydraulische rotshakkers worden gevonden, waarmee de interne patronen van de beweging van hydraulische rotshakkers diepgaand kunnen worden onthuld en een theoretische basis kan worden gelegd voor technische innovatie door gebruikers.
De onderzoeksaanpak van de theorie van het abstracte variabele ontwerp van hydraulische rotsonders: er wordt rekening gehouden met de niet-lineariteit van de werkparameters van hydraulische rotsonders, maar door middel van een equivalente krachttransformatie wordt het niet-lineaire systeem gelinialiseerd, zodat het kan worden bestudeerd met behulp van methoden voor lineaire systemen om analytische oplossingen te verkrijgen. De werkparameters en constructieparameters van hydraulische rotsonders die met deze methode worden verkregen, zijn zeer nauwkeurig en de berekening is eenvoudig. De theorie van het abstracte variabele ontwerp van hydraulische rotsonders wordt specifiek behandeld in de volgende hoofdstukken.

Welkom bij HOVOO, een Chinese zegelfabriek. Productie van PU, Rubber en PTFE zegels. De zegels omvatten O-ring, pistonzegel, stangzegel, Gray ring en gaszegel.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}