33-99Nr. Mufu E Rd. Dystrykt Gulou, Nanjing, Chiny [email protected] | [email protected]
33-99Nr. Mufu E Rd. Dystrykt Gulou, Nanjing, Chiny [email protected] | [email protected]

Pomysł badawczy stojący za teorią projektowania abstrakcyjnych zmiennych: niezależnie od tego, jak zmieniają się parametry robocze hydraulicznego młota do skał w trakcie eksploatacji, dwa parametry spełniające wymagania projektowe — energia uderzenia W H i częstotliwość uderzeń f H — nie mogą ulec zmianie; pozostałe parametry nie są szczególnie istotne dla projektanta, a tym bardziej dla użytkownika. Projektant powinien jednak zwrócić szczególną uwagę na skok tłoka S , ponieważ każde działanie tłoka odbywa się na stałym skoku S , a skok tłoka S jest ograniczony przez konstrukcję — nie może być dowolny. Zbyt duża skokowość nie jest dopuszczalna ze względu na budowę mechaniczną; zbyt mała skokowość nie pozwala spełnić wymagań dotyczących energii uderzenia i częstotliwości uderzeń. Innymi słowy, stanowi to ograniczenie działania hydraulicznego młota do skał, a istnieje wartość optymalna.
Jak rozwiązać problem obliczeń projektowych hydraulicznego młota do skał — który w rzeczywistości jest układem nieliniowym — przy użyciu metod liniowych, stanowi główną treść tego rozdziału.
— Podstawa teoretyczna przekształcania układu nieliniowego w układ liniowy
Podczas pracy hydraulicznego młota do skał parametry robocze — takie jak ciśnienie w układzie p , prędkość tłoka v , przyspieszenie a , a obciążenie tłoka — wszystkie te wielkości zmieniają się nieliniowo i są funkcjami czasu. Obliczenie takiego układu jest dość trudne i złożone. Jednak cel projektowy przedstawiony w tej książce jest stosunkowo prosty: znalezienie parametrów konstrukcyjnych i parametrów roboczych hydraulicznego młota skalnego zapewniających wymaganą energię uderzeniową W H i częstotliwość f H . Wzór na energię uderzeniową ma postać:
W H = ( m / 2) v 2m (3.1)
gdzie: m — masa tłoka, stała;
v m — chwilowa prędkość tłoka w chwili uderzenia w tył dłuta, czyli maksymalna prędkość uderzeniowa; to właśnie tę prędkość należy zagwarantować w procesie projektowania.
Istnieją dwa warunki zapewniające osiągnięcie wymaganej energii uderzeniowej: tłok musi mieć określoną masę oraz określoną prędkość. W przypadku hydraulicznego młota skalnego masa tłoka m nie ulega zmianie w trakcie ruchu. Zatem zapewnienie osiągnięcia wymaganej energii uderzeniowej oznacza zapewnienie osiągnięcia maksymalnej prędkości uderzeniowej v m .
Należy zaznaczyć, że ruch tłoka odbywa się na określonym skoku. Innymi słowy, celem obliczeń projektowych hydraulicznego młota skalnego jest zapewnienie, że na określonym skoku tłok o ustalonej masie zostanie dokładnie przyspieszony do określonej maksymalnej prędkości uderzeniowej v m w ramach określonego czasu cyklu T , uderzając w tył klinu i wydając określoną energię uderzeniową W H . Chwilowe zmiany a , v , oraz p podczas ruchu nie mają znaczenia dla celu obliczeń projektowych i mogą zostać pominięte. Zapewnienie czasu cyklu T zapewnia również określoną częstotliwość uderzeń f H .
Czas cyklu T i częstotliwość uderzeń f H zaspokoić f H = 60 / T , gdzie T to czas jednego cyklu roboczego tłoka (dla uproszczenia obliczeń krótką przerwę w punkcie uderzenia pomija się).
Gdyby można było znaleźć prostą metodę obliczeniową projektowania umożliwiającą osiągnięcie powyższego celu, byłoby to przydatne w inżynierskim procesie projektowania. Jak wiadomo, ciśnienie oleju hydraulicznego napędza tłok, wykonując pracę; zgodnie z prawem zachowania energii i pomijając inne straty energii, cała ta praca przekształca się w energię kinetyczną tłoka i jest oddawana na zewnątrz, co daje następującą zależność:
(m / 2) v 2m = ∫ 0S F (S ) d S (3.2)
Znaczenie fizyczne równania (3.2): prawa strona przedstawia pracę wykonaną przez siłę zmienną F (S ) na drodze ruchu S ; lewa strona przedstawia energię kinetyczną uzyskaną przez tłok podczas przemieszczania się na tej samej drodze. S .
Aby osiągnąć obliczenia zlinearyzowane, można wyobrazić sobie stałą siłę F g wykonującą tę samą pracę co siła zmienna F (S ) na tej samej drodze ruchu S . Zatem siła stała F g może zastąpić zmienną siłę F (S ) w obliczeniach liniowanych z równoważnym skutkiem, dając:
(m / 2) v 2m = ∫ 0S F (S ) d S = F g × S (3.3)
Podstawienie równania (3.1) do równania (3.3) daje:
F g = W H / S (3.4)
W równaniu (3.4) stała siła F g nazywana jest siłą równoważną; wykonuje ona dokładnie taką samą pracę jak siła zmienna F (S ).
Równanie (3.4) jest wzorem na obliczanie siły równoważnej. Energia uderzenia W H = ( m /2)v 2m jest określona w zadaniu projektowym i stanowi znany parametr. Skok S może zostać wyznaczony z obliczeń kinematycznych i również jest znany; dlatego można obliczyć siłę równoważną niezbędną do osiągnięcia wymaganej energii uderzenia. Poprawny dobór zaprojektowanego skoku S oraz częstotliwość f H , a także optymalizacja skoku S , zostanie stopniowo wprowadzony w kolejnych rozdziałach.
Ta siła równoważna jest bardzo przydatna w obliczeniach projektowych hydraulicznego młota do skał. Na podstawie siły równoważnej można określić powierzchnię tłoka narażoną na ciśnienie — czyli wymiary konstrukcyjne tłoka — ustalić warunki pracy i skuteczną objętość akumulatora oraz wykonać obliczenia kinematyczne i dynamiczne hydraulicznego młota do skał.
Powierzchnia tłoka narażona na ciśnienie wynosi:
A = F g / p g (3.5)
W równaniu (3.5), p g to równoważne ciśnienie oleju w układzie, odpowiadające pojęciu siły równoważnej, i jest to zmienna pozorna. Jednak biorąc pod uwagę opory ruchu oleju, rzeczywiste robocze ciśnienie oleju w układzie musi być wyższe niż równoważne ciśnienie oleju, dlatego ciśnienie nominalne stosowane w projektowaniu wynosi:
p H = KP g (3.6)
W równaniu (3.6), K = 1,12–1,15 to współczynnik oporów działania układu hydraulicznego. Wartość p H wybierane jest w praktyce na podstawie ogólnych wymagań projektowanego systemu, dzięki czemu pole powierzchni tłoka poddanego działaniu ciśnienia staje się obliczalne i znane. Dlatego też:
A = KF g / p H (3.7)
Podstawienie równania (3.4) daje:
A = KW H \/ ( p H S ) (3.8)
Należy zaznaczyć, że wyniki kinematyczne i dynamiczne uzyskane na podstawie powyższych założeń nie są w pełni realistyczne — opisane są one jako liniowo zmienne, tzn. ruch tłoka traktowany jest jako jednostajnie przyspieszony i jednostajnie opóźniony. Jednak czas cyklu tłoka T , maksymalna prędkość v m oraz skok ruchu S są rzeczywiste; dla spełnienia wymagań projektowych są one proste, praktyczne i dokładne.
W rzeczywistości najważniejszym pytaniem jest to, czy energia uderzenia W H , częstotliwość uderzeń f H , i przepływ Q napędzącego hydrauliczny młotek do skał są rzeczywiste. Ponieważ powierzchnia tłoka poddana ciśnieniu A jest stała, a skok S jest stały, wynika z tego, że przepływ pompy Q musi być również rzeczywisty.
W ten sposób zastosowanie zasady równoważnej siły pozwala uprościć nieliniowe obliczenia projektowe hydraulicznego młotka do skał do obliczeń liniowych; zarówno obliczenia kinematyczne, jak i dynamiczne można znacznie uprościć i traktować jako ruch jednostajnie przyspieszony oraz jednostajnie opóźniony.
Naukowe przeświadczenie związane z pojęciem równoważnej siły polega na zignorowaniu złożonego procesu, uchwyceniu istoty problemu oraz zlinearyzowaniu zadania nieliniowego. Jednak uzyskane wyniki są bardzo rzeczywiste i wiarygodne oraz pomocne w pogłębianiu zrozumienia i badaniu wzorców działania hydraulicznego młotka do skał.
Na podstawie zasady równoważnych sił prędkość i siły działające na tłok przedstawiono na rys. 3-1; obejmują one trzy etapy: przyspieszanie suwu zwrotnego, hamowanie suwu zwrotnego (hamowanie) oraz suw roboczy.
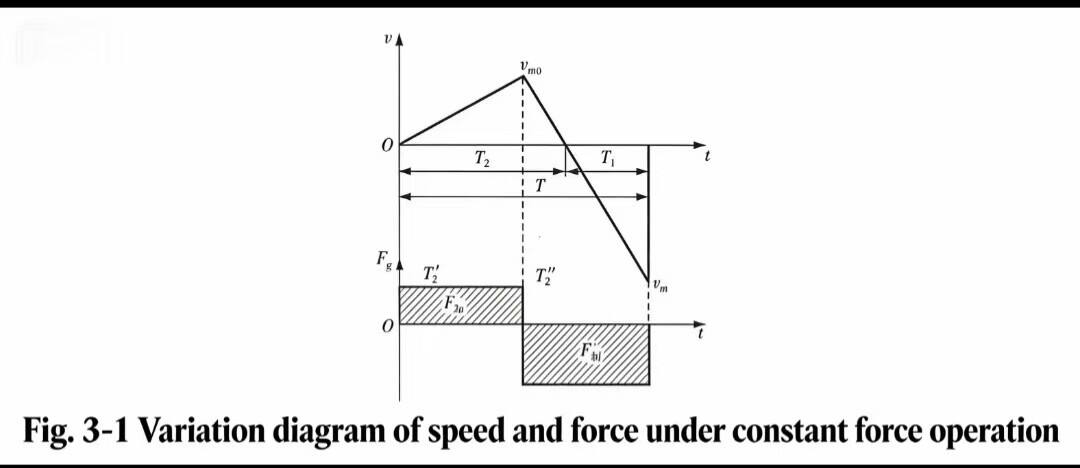
(1) Równanie dynamiki dla etapu przyspieszania tłoka w suwie zwrotnym
Niech siła napędzająca suw zwrotny F 2 g , prędkość v i przyspieszenie a będą oznaczone jako [+]. Równoważna siła napędzająca powodująca przyspieszenie tłoka w suwie zwrotnym wynosi:
F 2 g = p g A ′2 = - Co? 2 (3.9)
gdzie: a 2= [+] — przyspieszenie tłoka w suwie zwrotnym;
A ′2— skuteczna powierzchnia tłoczni komory czołowej tłoka;
p g — równoważne ciśnienie układu.
(2) Równanie dynamiki dla etapu hamowania tłoka w suwie zwrotnym
Równoważna siła napędowa hamująca tłok w czasie suwu zwrotnego to:
F 3g = p g A ′1 = - Co? 3 (3.10)
gdzie: a 3= [−] — opóźnienie (hamowanie) tłoka w czasie suwu zwrotnego.
(3) Równanie dynamiki dla etapu suwu roboczego tłoka
Równoważna siła napędowa przyspieszająca tłok w czasie suwu roboczego to:
F 1G = p g A ′1 = - Co? 1 (3.11)
gdzie: a 1= [−] — przyspieszenie tłoka w czasie suwu roboczego;
A ′1— skuteczna powierzchnia działania ciśnienia w tylnej komorze tłoka.
Pojęcie skutecznej powierzchni działania ciśnienia różni się w zależności od trzech różnych zasad działania hydraulicznego młota do skał opisanych powyżej; omówiono je szczegółowo w rozdziale poświęconym dynamice.

Witamy w HOVOO, chińskiej fabryce pieczęci. Produkcja pieczęci z PU, gumi i PTFE. Pieczęcie obejmują O-ring, pieczęć tłokową, pieczęć wałkową, Gray ring i pieczęć gazową.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}