33-99Nr. Mufu E Rd. Dystrykt Gulou, Nanjing, Chiny [email protected] | [email protected]
33-99Nr. Mufu E Rd. Dystrykt Gulou, Nanjing, Chiny [email protected] | [email protected]

W teorii każdy hydrauliczny młotek do skał wymaga akumulatora o zmiennej wartości ciśnienia — w szczególności dużego akumulatora wysokociśnieniowego.
Akumulator wysokociśnieniowy, zainstalowany na wejściu układu hydraulicznego młotka do skał, pełni trzy funkcje:
(1) Do zrównoważenia nadwyżki i niedoboru dostawy układu oraz zużycia oleju. Gdy wydajność pompy jest większa niż zużycie oleju przez układ, akumulator wysokociśnieniowy pochłania nadmiarową wydajność i pełni funkcję urządzenia magazynującego olej. Gdy wydajność pompy jest mniejsza niż zużycie oleju przez układ, akumulator dopływa olejem, uzupełniając niedobór, i działa jako urządzenie dopływu oleju. Akumulator wysokociśnieniowy pełni rolę zrównoważenia nadwyżki i niedoboru przepływu w układzie i stanowi ważny element zapewniający stabilną pracę układu.
(2) Do pochłaniania fluktuacji ciśnienia w układzie oraz redukcji małych szczytów ciśnienia, co chroni rurociągi i komponenty hydrauliczne oraz wydłuża ich czas użytkowania.
(3) W projektowaniu mechanizmów uderzeniowych hydraulicznych z wykorzystaniem abstrakcyjnej teorii zmiennych wspomaga realizację siły równoważnej. O ile akumulator zostanie zaprojektowany poprawnie, możliwa jest uzyskanie dokładnej siły równoważnej, co zapewnia osiągnięcie wymaganych parametrów kinematycznych i dynamicznych układu.
Biorąc pod uwagę istotną rolę akumulatora wysokociśnieniowego w systemie hydraulicznego młota do skał — a zwłaszcza jego specjalną funkcję zapewniającą osiągnięcie wymaganych charakterystyk kinematycznych i dynamicznych systemu — opracowanie poprawnej teorii i metody projektowania akumulatora wysokociśnieniowego ma ogromne znaczenie.
Skuteczna objętość wydawana jest ważnym parametrem eksploatacyjnym akumulatora oraz podstawą obliczeń projektowych akumulatora. Gdy hydrauliczny młot do skał pracuje w stanie ustalonym, maksymalna objętość oleju, jaką akumulator magazynuje i wydaje w jednym cyklu, nazywana jest skuteczną objętością wydawaną i oznaczana symbolem Δ V .
Skuteczna objętość wydawana Δ V jest związana z charakterystykami kinematycznymi. Gdy przepływ pompy jest stały, a konstrukcja oraz charakterystyki kinematyczne hydraulicznego młota do skał są stałe, energia uderzenia W H , częstotliwość f H i skuteczna objętość wydawana Δ V są z konieczności stałe. Dlatego przy projektowaniu akumulatora znana jest już skuteczna objętość rozładowania. Jak obliczyć Δ V zostanie przedstawione w kolejnych rozdziałach.
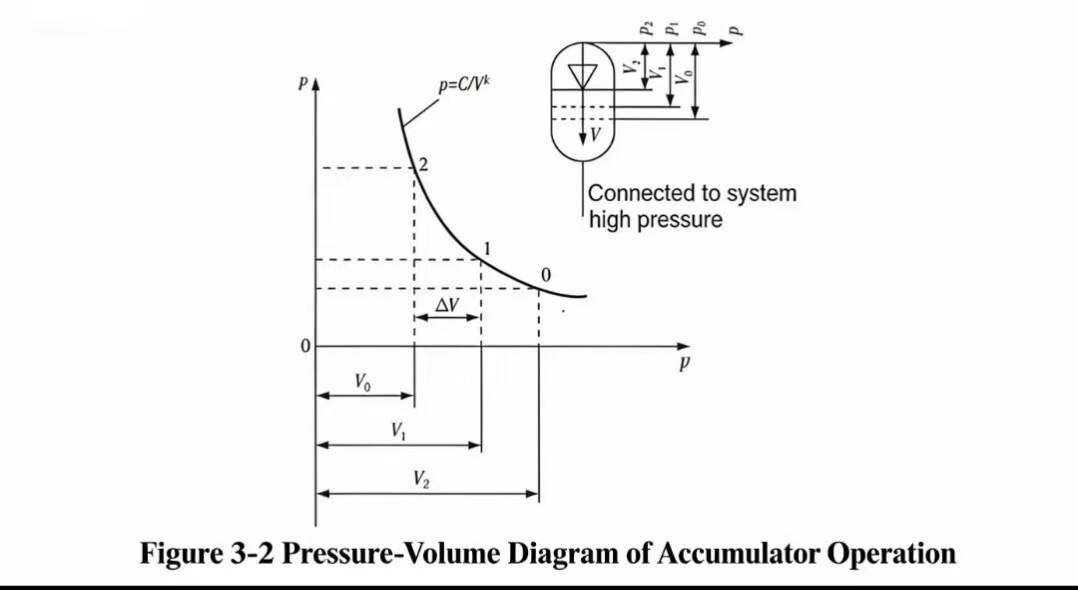
Podstawą do obliczania skutecznej objętości akumulatora V a jest jego rzeczywista skuteczna objętość rozładowania Δ V . Gdy Δ V działa wewnątrz akumulatora, powoduje to koniecznie zmianę ciśnienia oleju w układzie, a równoważna siła F g musi być utrzymana. Dlatego należy opracować metodę obliczeniową projektowania akumulatora spełniającą powyższe wymagania. Na rys. 3-2 przedstawiono wykres zależności ciśnienia (siły) od objętości akumulatora w trakcie jego pracy.
Chociaż częstotliwość pracy hydraulicznego młota skalnego nie jest bardzo wysoka, proces sprężania i rozprężania azotu w jego wnętrzu przebiega również dość szybko, a czas na wymianę ciepła ze środowiskiem jest niewystarczający; można go więc traktować jako proces adiabatyczny. Z równania stanu gazu:
p 1V k 1 = p 2V k 2 = p a V k a (3.12)
gdzie: p a — ciśnienie wstępne, tj. ciśnienie zamkniętego gazu;
V a — objętość wstępna, tj. objętość akumulatora, gdy tłok znajduje się w punkcie uderzenia (zazwyczaj maksymalna objętość robocza); V amax );
p 2— maksymalne ciśnienie robocze;
V 2— objętość odpowiadająca p 2(zazwyczaj minimalna objętość robocza); V 2 min );
p 1— minimalne ciśnienie robocze;
V 1— objętość odpowiadająca p 1, V 1 < V a .
W równaniu (3.12), k = 1,4 jest wykładnikiem adiabaty. Oczywiście:
δ V = V 1 − V 2 (3.13)
Z równania (3.12):
V 1 = V a (p a / p 1)1/K (3.14)
V 2 = V 1 (p 1 / p 2)1/K (3.15)
Podstawienie do równania (3.13) daje:
δ V = V a (p a / p 1)1/K [1 − 1 / ( p 2 / p 1)1/K ] (3.16)
W równaniu (3.16) przyjmijmy p a / p 1 = a = 0,8 do 1; a stosunek ciśnienia roboczego gazu γ = p 2 / p 1, typowo γ = 1,2 do 1,45, dobierany na podstawie charakterystyki roboczej hydraulicznego młota skalnego. Gdy a = 1, minimalne ciśnienie robocze tłoka jest równe ciśnieniu ładowania ( p a = p 1); w tym stanie V 1 = V a . Aby zapobiec dotknięciu membrany akumulatora do jego dna przy minimalnym ciśnieniu roboczym hydraulicznego młota skalnego — co skróciłoby jego czas eksploatacji — a powinien być ustawiony na wartość mniejszą niż 1.
Istnieją dwa aspekty do rozważenia przy wyborze γ : gdy γ jest duża, ponieważ akumulator pracuje w stanie adiabatycznym, temperatura gwałtownie rośnie, co może spowodować wcześniejsze zużycie membrany akumulatora lub nawet jej przepalenie; jednak zwiększenie γ skutecznie zmniejsza objętość skuteczną V a akumulatora, co jest bardzo korzystne dla redukcji wymiarów konstrukcyjnych akumulatora. Projektant musi dokładnie zważyć zalety i wady oraz podjąć decyzję na podstawie warunków zastosowania; dlatego:
δ V = V a a 1/K (1 − 1 / γ 1/K ) (3.17)
Z równania (3.17) można wyznaczyć objętość skuteczną akumulatora:
V a = Δ Vγ 1/K / [ a 1/K (γ 1/K − 1)] (3.18)
Równ. (3.18) pokazuje, że na podstawie efektywnej objętości wytrysku Δ V , można określić odpowiadającą jej objętość doładowania, aby zapewnić osiągnięcie zaprojektowanej kinematyki oraz wartości Δ V . W praktyce efektywna objętość wytrysku Δ V to olej, który akumulator dostarcza tłokowi w czasie suwu roboczego, aby uzupełnić niedobór zasilania ze strony pompy.
W celu obliczeń projektowych efektywnej objętości wytrysku Δ V zobacz rozdział 7.5. Aby spełnić wymagania optymalnego projektowania, dla różnych celów projektowych obliczanie efektywnej objętości wytrysku Δ V zmienia się w zależności od wybranego α u (zob. punkty 7.2.5 i 7.27a).
W tym momencie, choć V a zostało wyznaczone i może być wykorzystane do zaprojektowania parametrów konstrukcyjnych akumulatora, zadanie obliczeniowe projektowe akumulatora nie zostało jeszcze zakończone. Najważniejszym zagadnieniem jest sposób sterowania ciśnieniem oleju w celu zapewnienia osiągnięcia siły równoważnej; dopiero po osiągnięciu siły równoważnej można zagwarantować zaprojektowaną kinematykę, która z kolei gwarantuje Δ V . Innymi słowy, istnieje zależność wzajemna pomiędzy Δ V i F g .
Należy podkreślić, że gdy V a jest wartością stałą, p 1, p 2, oraz p a może przyjmować wiele kombinacji, realizujących wiele sił równoważnych, wiele układów dynamicznych oraz wiele układów kinematycznych — czyli wiele wartości Δ V zadaniem następnym jest, dla ustalonego V a , znalezienie kombinacji p 1, p 2, oraz p a która może osiągnąć wymaganą siłę równoważną F g i Δ V . Ponieważ, gdy p a zmienia się, W H , f H , Δ V , p 1, oraz p 2zmieniają się odpowiednio. Innymi słowy, musi istnieć ciśnienie ładowania p a gwarantujące osiągnięcie ciśnienia równoważnego p g . Oczywiście podstawą wyznaczenia p a is p 1i p 2, czyli ciśnienia równoważnego p g . Gdy zrozumiane zostaną zależności między tymi parametrami, można określić metodę wyznaczania p 1, p 2, oraz p a z równoważnego ciśnienia p g można badać.
Rys. 3-2 przedstawia p –V diagram akumulatora wysokociśnieniowego w trakcie pracy. Na podstawie tego diagramu oraz z zasady siły równoważnej — praca wykonana przez siłę zmienną jest równa pracy wykonanej przez siłę równoważną — otrzymujemy:
p g δ V = ∫ V₂ V₁ p g V (3.19)
W równaniu (3.19):
p = C / V k
Po podstawieniu do równania (3.19) i całkowaniu:
p g δ V = C ∫V₂ V₁ g V / V k = 1 / (1 − k ) ( p 1V k 1V 1−k 1 − p 2V k 2V 1−k 2) (3.20)
Zatem:
p g δ V = 1 / (1 − k ) ( p 1V 1 − p 2V 2) (3.21)
Eliminuje V 1i V 2po podstawieniu oraz podstawieniu równania (3.17) otrzymujemy:
p g = p 1\/ ( k − 1) · ( γ − γ 1/K ) / ( γ 1/K − 1) (3.22)
Po przekształceniu:
p 1 = p g (k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.23)
W równaniu (3.23) p g oznacza ciśnienie równoważne działające na powierzchnię tłoka zwróconą ku ciśnieniu. Biorąc pod uwagę straty ciśnienia w układzie, powinno ono być wyrażone jako nominalne ciśnienie układu p g = p H / K . The p 1i p 2uzyskane w ten sposób będą bliższe rzeczywistym wartościom. Zatem:
p 1 = ( p H / K )(k − 1) ( γ 1/K − 1) / ( γ − γ 1/K ) (3.24)
p 2 = γp 1 (3.25)
p a = ap 1 (3.26)
W równaniu (3.24) współczynnik oporu uwzględniający straty ciśnienia w układzie wynosi K = 1,1 do 1,2.
Gdy akumulator wysokiego ciśnienia hydraulicznego młota do skał działa w tych parametrach, zapewnia to osiągnięcie równoważnego efektu siły ruchu, realizację zaprojektowanej kinematyki oraz dostarczenie wymaganej energii uderzeniowej i częstotliwości uderzeń. W ten sposób złożony problem obliczeniowy jest uproszczony, a problem nieliniowy – zlinearyzowany.
Na podstawie powyższego urządzenie hydrauliczne udarowe (hydrauliczna wiertnica do skał i hydrauliczny młot do skał) — jako układ nieliniowy — jest przekształcany w układ liniowy. Z teoretycznego punktu widzenia tłok może poruszać się na całej długości skoku S według dowolnego przebiegu, o ile można go kontrolować i w punkcie uderzenia osiągnie wymaganą maksymalną prędkość v m — wszystko to jest wykonalne. Dla każdego wzorca ruchu tłoka musi istnieć odpowiadający mu wzorzec zmian siły; oba są powiązane jako przyczyna i skutek. Innymi słowy, niezależnie od tego, jaki wzorzec ruchu ma tłok, należy na niego zadziałać odpowiadającym mu wzorcem zmian siły — siła jest przyczyną, a ruch skutkiem.
Oczywiście po zaprojektowaniu optymalnego wzorca ruchu można również określić odpowiadający mu wzorzec zmian siły, co stawia dwa teoretyczne zagadnienia do badań nad hydraulicznymi młotami górniczymi: kinematykę i dynamikę hydraulicznego młota górniczego.

Witamy w HOVOO, chińskiej fabryce pieczęci. Produkcja pieczęci z PU, gumi i PTFE. Pieczęcie obejmują O-ring, pieczęć tłokową, pieczęć wałkową, Gray ring i pieczęć gazową.



 EN
EN
 AR
AR CS
CS DA
DA NL
NL FI
FI FR
FR DE
DE EL
EL IT
IT JA
JA KO
KO NO
NO PL
PL PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID LV
LV SR
SR SK
SK VI
VI HU
HU MT
MT TH
TH TR
TR FA
FA MS
MS GA
GA CY
CY IS
IS KA
KA UR
UR LA
LA TA
TA MY
MY
{kind=link}